
Abstract
Recent technological improvements have revolutionized the wireless sensor network–based industrial sector with the emergence of Internet of Things. Internet of Drones, a branch of Internet of Things, is used for the communication among drones. As drones are mobile in nature, they cause frequent topological changes. This changing topology causes scalability, stability, and route selection issues in Internet of Drones. To handle these issues, we propose a bio-inspired clustering scheme using dragonfly algorithm for cluster formation and management. In this article, we propose cluster head election based on the connectivity with the base station along with the fitness function which consists of residual energy and position of the drones. Furthermore, for route selection we propose an optimal path selection based on the residual energy and position of drone for efficient communication. The proposed scheme shows better results as compared to other bio-inspired clustering algorithms on the basis of evaluation benchmarks such as cluster building time, network energy consumption, cluster lifetime, and probability of successful delivery. The results indicate that the proposed scheme has improved 60% and 38% with respect to ant colony optimization and grey wolf optimization, respectively, in terms of average cluster building time while average energy consumption has improved 23% and 33% when compared to the ant colony optimization and grey wolf optimization, respectively.
Introduction
With the advancement of wireless communication technologies and wireless sensor networks (WSNs), new doors of evolution are opened for industrial sector. In the industry, the deployment of WSN can facilitate in fault and resource indication, product development, and quality management. 1 The data collection process from various machines, sensors, and actuators and access to data and devices can be enabled via Internet in an industrial environment, giving birth to Industrial Internet of Things (IIoT). IIoT benefits in overall efficiency by improving the cost with minimal human involvement. Typical IIoT applications have centralized model (cloud) for exhaustive data processing and storage. The rapidly growing industrial data make it challenging for data transmission over a network. The interface between network of drones and WSN will help to mitigate the transmission issue.
Drones have become an emerging technology with sensing, processing, storage, and communication capabilities. They can be used in different industries such as intelligent transportation systems, smart cities,2–6 and Internet of things (IoT) scenarios. 7 The deployment of swarm of drones for IoT services has become reality for various applications such as package delivery, 8 public safety, 9 search and rescue, 10 tracking, and surveillance.11–13 These IoT-enabled applications have paved the way for the new paradigm named as Internet of Drones (IoD). 14
The characteristics of drones such as easy deployment and mobility make them useful for communication. The network topology can be of two types, namely, standalone and clustered. 15 In standalone topology, a single drone can transmit data via satellite as shown in Figure 1(b), while in clustered network topology the data transmission occurs through intermediate drones. As drones are mobile, they can be used as information carriers, that is, forward the information to the distant destination. If the destination is not in direct communication range of the drone, the communication occurs via multiple hops (Figure 1(a)). The swarm of drones collaborate to form a network for forwarding the information to the destination. Although survivability, scalability, and reliability are the distinctive attributes of IoD, they bring more challenges in communication as well as networking of drones. 16 The high mobility of drones makes the topology to change rapidly, resulting in communication problems.
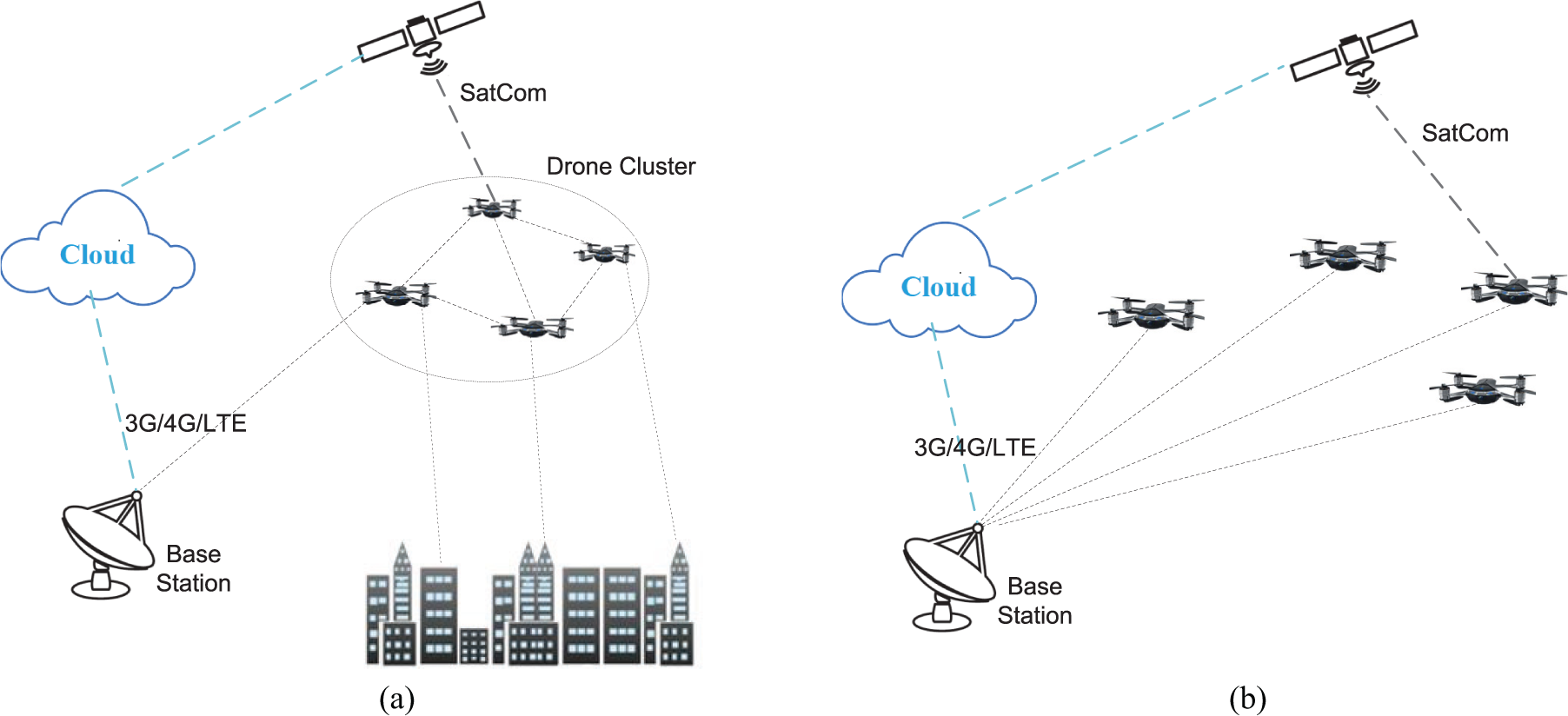
Network topology architecture in IoD: (a) the swarm of drones collaborate to form a network for forwarding the information to the destination and (b) standalone topology where a single drone can transmit data via satellite.
Drones have scarce battery resource and limited computational power which can influence the overall communication efficiency in IoD. In order to efficiently utilize these scarce resources, developing a communication mechanism that ensures lower routing overhead and lower computational complexity and yields higher throughput can be a challenging task. The routing mechanisms for efficient communication is required for the transmission of information among drones. The rapidly changing topology and the mobility of drones in IoD make the communication among drones a critical task. 14 The answer to these problems is the hierarchal routing known as clustering. 17
In clustering, which is the formation of network into sub-groups, a cluster comprises cluster head (CH) and cluster members (CMs). A CH is elected among all the members in the cluster and it controls the performance of cluster by managing it in an efficient and effective way. Thus, CH selection is one of the important tasks of clustering and each CM can be a candidate for CH selection. Instead of single-hop communication networking, multi-hop cluster-based networking results in better performance and scalability. 18 In clustering algorithms, cluster formation and CH election is a vital process to efficiently maintain cluster topology. Subsequent change in relative position of CMs completely alters the whole cluster topology. The rapidly changing topology in IoD makes the cluster formation and management a difficult task and drains the drones’ energy resource. There is a need to develop efficient clustering algorithm for better scalability and efficiency of rapidly changing topology and effective use of energy resource.
The swarm intelligence (SI) 19 based methods can be used for near-optimal solutions. In an ad hoc approach, there is no central control which results in increasing complexity in configuration and management. There is a need to design such networking algorithms that have self-organizing capabilities such as self-configuring, self-healing, self-optimization, and adaptive to the environment. Bio-inspired mechanisms such as ant colony optimization (ACO) 20 and grey wolf optimization (GWO) 21 have been proposed for clustering in ad hoc networks. But these algorithms are inefficient resulting in high energy consumption and low cluster lifetime.
Keeping in mind the constraints of IoD, our main focus is to efficiently handle the challenges of topology management for better communication in IoD. Our contributions are as follows:
In this article, we propose an interface architecture between industrial WSN and IoD network by considering smart WSN gateway node. We also propose a bio-inspired clustering scheme for IoD (BICIoD) by using the dragonfly algorithm (DA).
We propose CH selection and cluster formation based on the connectivity with the BS along with fitness function comprising residual energy level and position of the drones. The drone with the highest fitness will be elected as CH, while rest of the drones become its member.
For efficient network management, we propose DA-inspired cluster management. The position of all the drones is updated according to the DA.
For communication among drones, the next hop drone is selected based on optimal path selection mechanism which consists of residual energy level and position of drones.
To verify the performance efficiency of our propose scheme, we analyze our scheme with other bio-inspired clustering algorithms such as gray wolf optimization (GWO) and ant colony optimization (ACO).
Related work
Recently there have been several researches proposed to solve routing issues using clustering in ad hoc networks. Hussein et al. 22 proposed flexible weighted clustering algorithm which is based on battery power. The basic goal of this algorithm is to prevent nodes having low battery power to be elected as CH. Ni et al. 23 proposed a mobility prediction–based clustering algorithm by using estimation of speed of nodes relative to each other. Every node compiles the average relative speed of the neighboring nodes by exchanging Hello packets with each other. The node having lowest relative mobility is selected as a CH and other nodes become the CMs. However, the high mobility of nodes decreases the lifetime of CH.
The authors proposed mobility prediction clustering algorithm (MPCA), 24 a combination of dictionary structure prediction and link expiration time (LET), for drones network. LET between two drones is calculated by using location and mobility information of drones. The CH is elected on the basis of largest weight of neighboring drones and CH then broadcasts the CH announcement to the neighboring drones. The drone which receives several messages considers CH with longer LET. Shi and Luo 25 proposed a mechanism of cluster-based location aided dynamic source routing (CBLADSR) which is a weight-based clustering. In CBLADSR, the CH is elected on the basis of highest energy level, low relative speed, and having a large number of neighboring drones. Every drone maintains neighbor table of all the neighboring drones for communication and CH election. The drone with highest weight factor among others becomes the CH.
Khelifi et al. 26 proposed a weighted centroid localization based clustering mechanism where the drone position is calculated using fuzzy logic. The CH is elected on the basis of the location, calculated by the received signal strength indicator (RSSI) between two drones. After the cluster formation, the distances for all drones are calculated by the received RSSI values. CH becomes responsible for the transmission of information from CMs to the distant base station (BS). Another RSSI-based hybrid clustering scheme is proposed by Okcu and Soyturk 27 where a drone is considered as a mobile sink to collect data in WSN. The CH election is based on the residual energy and position of nodes near to the drone. The nodes which are not in the range of the drone are connected to CH via multiple hops. The sensor nodes continuously record the RSSI values from drone beacons which are considered for the clustering. The highest value of RSSI is considered for the CH election.
Yu et al. 28 proposed a bio-inspired mobility prediction clustering mechanism by combining the mobility factor of drones and foraging model of Physarum polycephalum to the drone network. For CH election, all drones calculate the value of neighboring drones. The drone with the highest probability becomes the CH and the rest of the drones become its members. In another research, Yang et al. 29 proposed a mechanism for efficient routing strategy in drones network by integrating the clustering features of WSNs and drone. Network is divided into multiple clusters, and all the sensor nodes in the cluster are stationary and location aware. The drone knows the exact location information of all the CHs of the clusters. The moving drone collects data from the CHs and routes it based on ACO. Bahloul et al. 30 proposed a hybrid mechanism for communication among drones based on boid Reynolds and AODV protocol. Their proposed solution has three steps: AODV for reactive routing computation, boids Reynolds method for connectivity, and discovery of ground BS. Boid Reynolds method is a bio-inspired method for maintaining the formation of birds’ flock or school of fish with three basic rules of separation, alignment, and cohesion.
Maistrenko et al. 31 proposed a routing algorithm based on ACO for optimal route between drones in FANET. ACO utilizes the behavioral study of ants for finding optimal path to the food. The forward ants move toward the food leave pheromones in their path. The backward ants follow that route with the highest value of pheromones for the optimal route to the destination. Al-Aboody et al. 32 proposed a multi-level hierarchical routing protocol which is a hybrid clustering algorithm for selection of CH in three levels of the network. In first level, the CH is selected based on the distance from BS, residual energy, and ratio of energy consumption. The second level uses the probabilistic selection of CH based on GWO algorithm. The CH is selected based on fitness function which consists of residual energy and number of neighboring nodes. Whereas for the third level, a distributed tree-based approach is used for CH selection. But due to high computation, these clustering algorithms are inefficient resulting in high energy consumption and low cluster lifetime.
System model
WSN has a lot of applications in industrial domain. The integration of industrial WSN and IoD can open new doors toward deployment of future generation networks. Ideal clustering is an NP-hard problem 33 and is more difficult in IoD-based WSN network. Therefore, we propose dragonfly 34 SI-based optimization scheme which can be useful to find near-optimal solutions which is desirable for IoD-based WSN network. Similarly, in cluster-based ad hoc networks, finding an optimal clustering solution for cluster formation and maintenance is more challenging in IoD-based network. In this article, we have considered a special case where we perform integration between industrial WSN and IoD. Figure 2 explains in detail about our proposed architecture for collaboration between industrial WSN and IoD. In our system model, we have considered following assumptions. Every factory consists of its own WSN network which is connected with Smart WSN Gateway Node (SGN). If a WSN network needs to transmit any data packets to BS, it will transmit those packets to SGN. SGN has an ability to process the data received from WSNs and transmit it to a drone network after establishing a connection. As a result, SGN acts as a gateway between industrial WSN and IoD. A three-way packet handshaking between SGN and a drone will ensure connectivity when an SGN lies within a coverage range of a drone. This packet handshaking is explained in the “Drone communication” section. After connectivity with SGN, drone will receive data packets, and using its deployed network technology, drones will transmit those received packets to BS. In this article, we have considered a cluster–based drone network topology instead of standalone topology to ensure effective and efficient communication between drones in IoD network by keeping in mind our setup of industrial WSNs. We assume drones in IoD network can directly access the cloud facility using satellite link in any special case if needed. To manage the cluster-based drone network topology, BICIoD scheme is proposed in this article to ensure proper data communication between industrial WSN and BS using cluster-based deployed topology of drones.
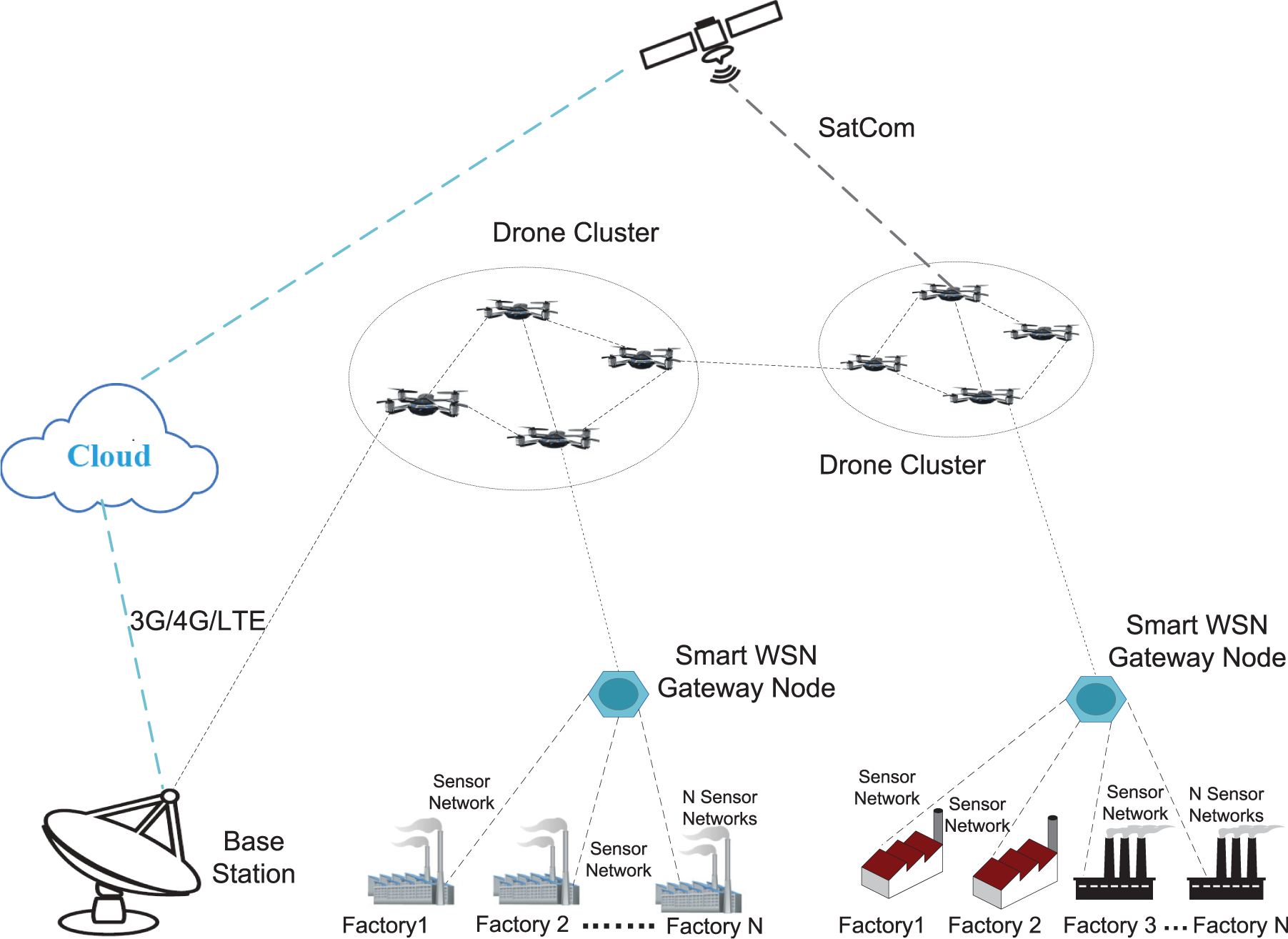
Proposed architectural interface of IoD and industrial WSN.
Bio-inspired clustering scheme
For better network management and efficient communication among drones, we propose a clustering scheme for IoD inspired by DA. The DA 34 calculates the optimal position of dragonfly.
Mathematical model of DA
Dragonflies have unique swarming behavior which comprises hunting (static swarm) and migration (dynamic swarm). The static swarm has main characteristics as local movement and rapid changes in the flying route. In static swarm, dragonflies hunt for the food while flying back and forth in a small group, while in dynamic swarm, swarm of dragonflies move in one direction over a long distance. These swarming behaviors are similar to the two phases of optimization using meta-heuristics, namely exploration and exploitation, respectively. 34
In DA, there are five main factors for updating the position of dragonfly in swarms and are named as separation, alignment, cohesion, attraction, and distraction as shown in Figure 3.

DA Swarm patterns: (a) separation, (b) alignment, (c) cohesion, (d) attraction for food, and (e) distraction from enemy.
The separation

where X is the current position,
The alignment

where
The cohesion

The attraction

where
The distraction

where
The swarming behavior of dragonflies is the combination of these factors. For updating the position of dragonflies, two vectors namely step

where s, a, and c are the separation, alignment, and cohesion weights, respectively, while f and e are the food and enemy factors, respectively. w represents the inertial weight and t shows current iteration.
After the calculation of step vector, the position vector is calculated as follows

For exploration, search space is done using random walk (Levy flight) 34 and is calculated as follows

where

where
The position of dragonfly can be updated by the following equation

where d shows the dimension of position vectors.
CH election and cluster formation
For efficient communication and data transmission, our clustering approach considers the selection of CH on the basis of connectivity with the BS and fitness function which depends on the residual energy level and the position of drone. The cluster formation mechanism is illustrated in Figure 4. The fitness is calculated as

where
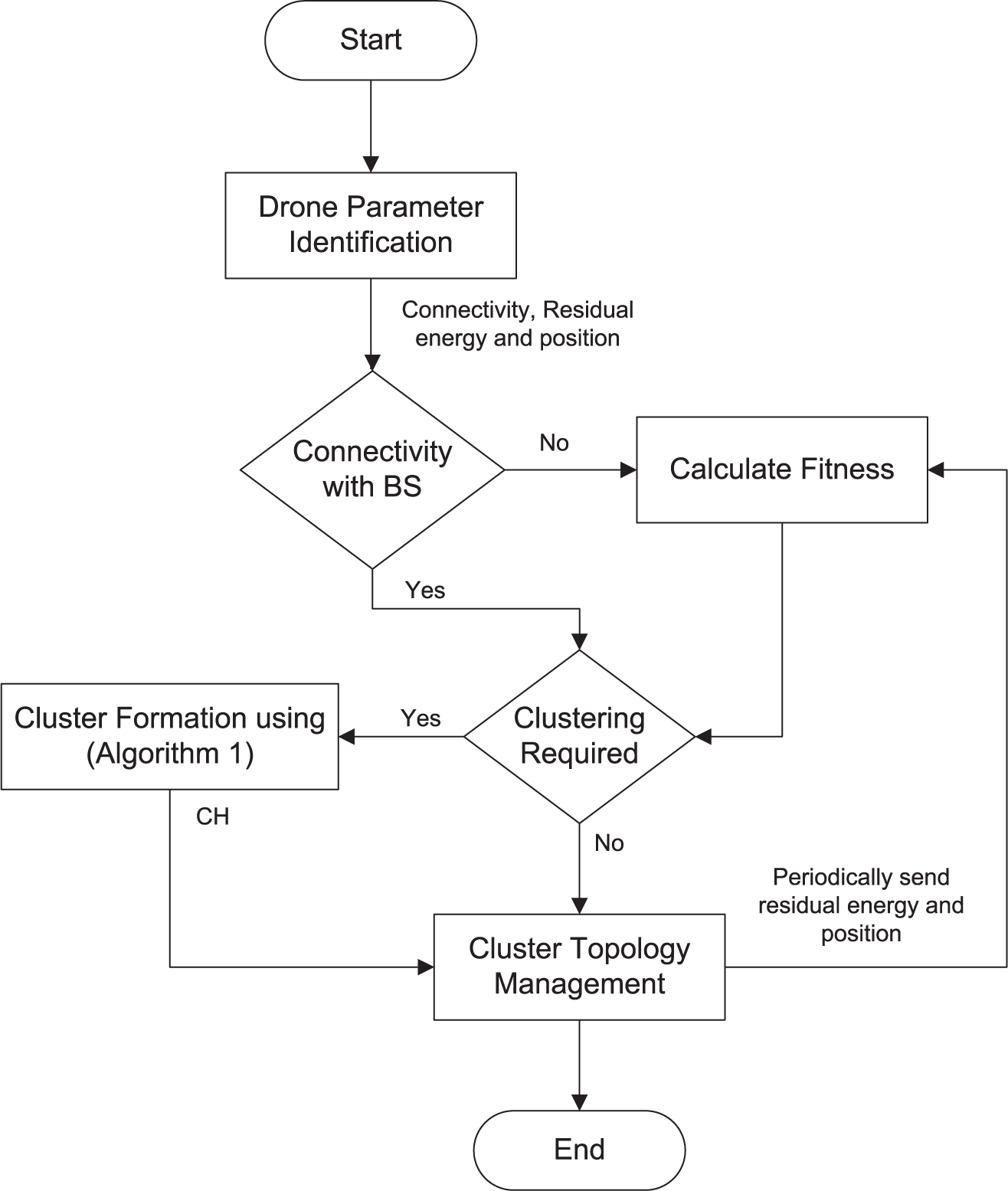
Cluster formation mechanism for BICIoD.
The function for residual energy of the drone is given by

Here, RE is the residual energy level,
The function for position of drone is given by

Scenario 1: single drone has connectivity with the BS
When a drone needs to send some information but it is not in the range of BS, the coalition of drones is formed in an ad hoc manner. The drone then transmits information to the destination through multi-hops via intermediate drones. The drone which has the connectivity with the BS will declare itself as CH and will transmit the cluster formation message to other drones. The rest of the drones will become its CMs.
Scenario 2: more than one drone has connectivity with the BS
When more than one drone is connected with the BS, then the fitness is evaluated based on residual energy and position of the drone. The drone with the highest fitness among other drones having connectivity with the ground control station will be elected as CH.
Scenario 3: when there is no direct connectivity with the BS
If there is not any drone which has a direct connectivity with the BS, then communication can occur via a relay drone of other cluster. The election of CH will be based on fitness, the drone with the highest fitness will be elected as CH and the rest of the drones become its CMs.
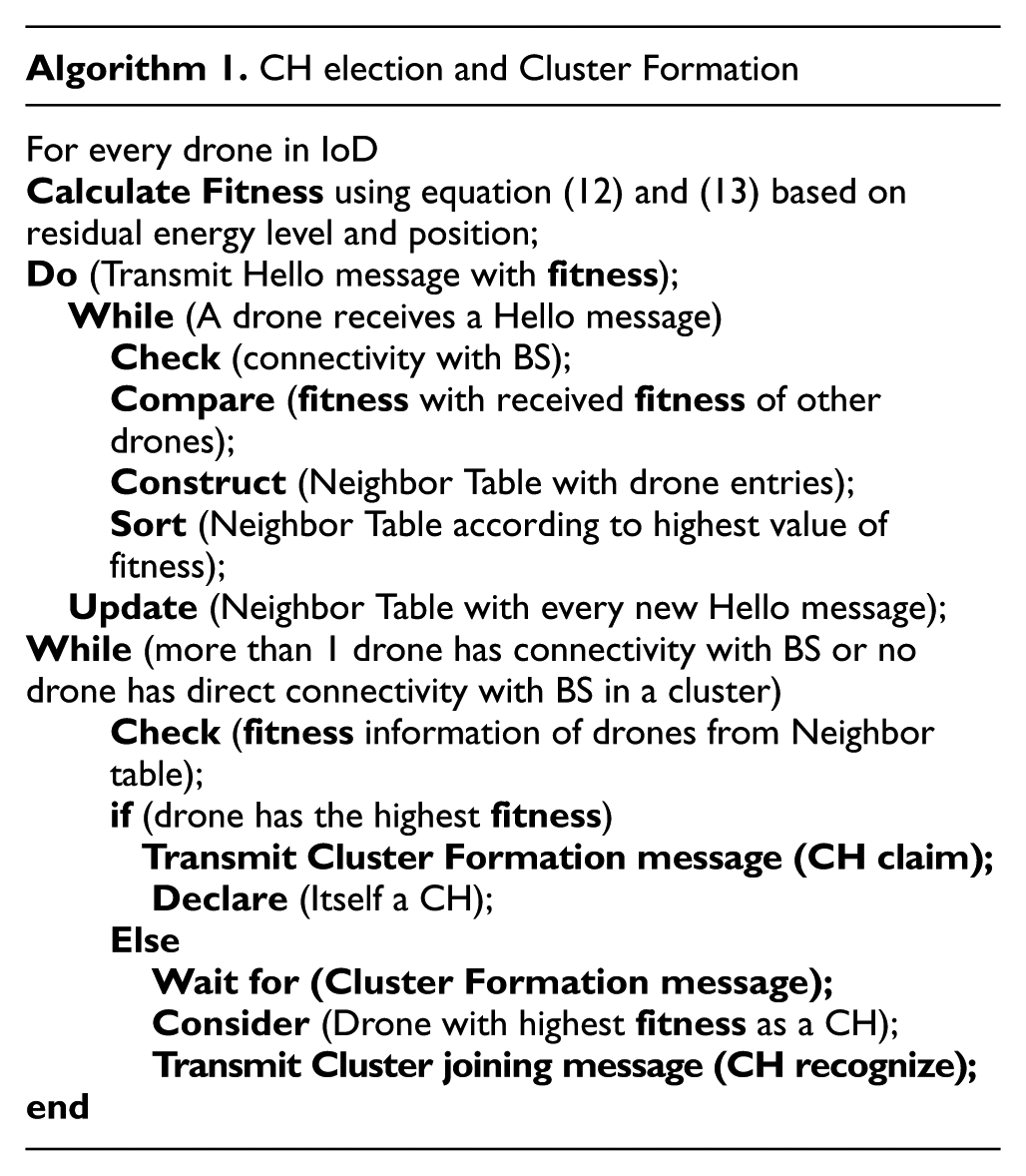
Considering these three scenarios of topology configuration, the CH election and cluster formation is explained by Algorithm 1.
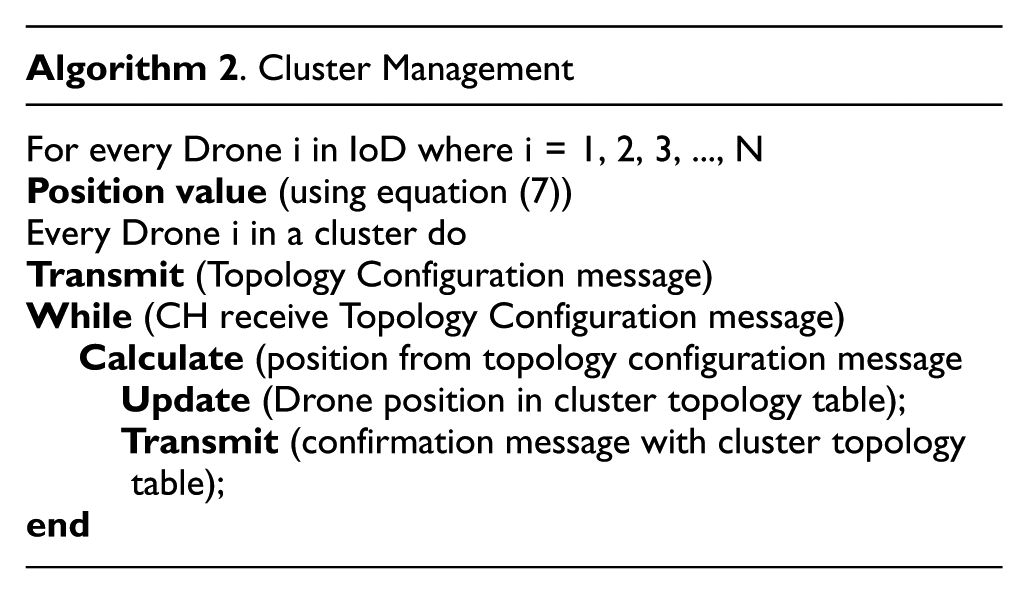
Cluster management
Cluster management of our proposed BICIoD is performed according to the DA as depicted in Figure 5. The position of each dragonfly (Drone CM) is updated according to the movement based on separation, alignment, and cohesion as shown in Figure 6. The CMs need to follow the movement of the CH and adjust their position accordingly as explained by Algorithm 2. The CH manages the cluster by continuously updating the topology table from the received position information of all the drones in a cluster. Based on the updated position if a drone moves out of the neighborhood range, that drone is no longer a member of the cluster. The CH then transmits the updated topology table to the CMs and maintains the cluster.

Cluster management mechanism for BICIoD.
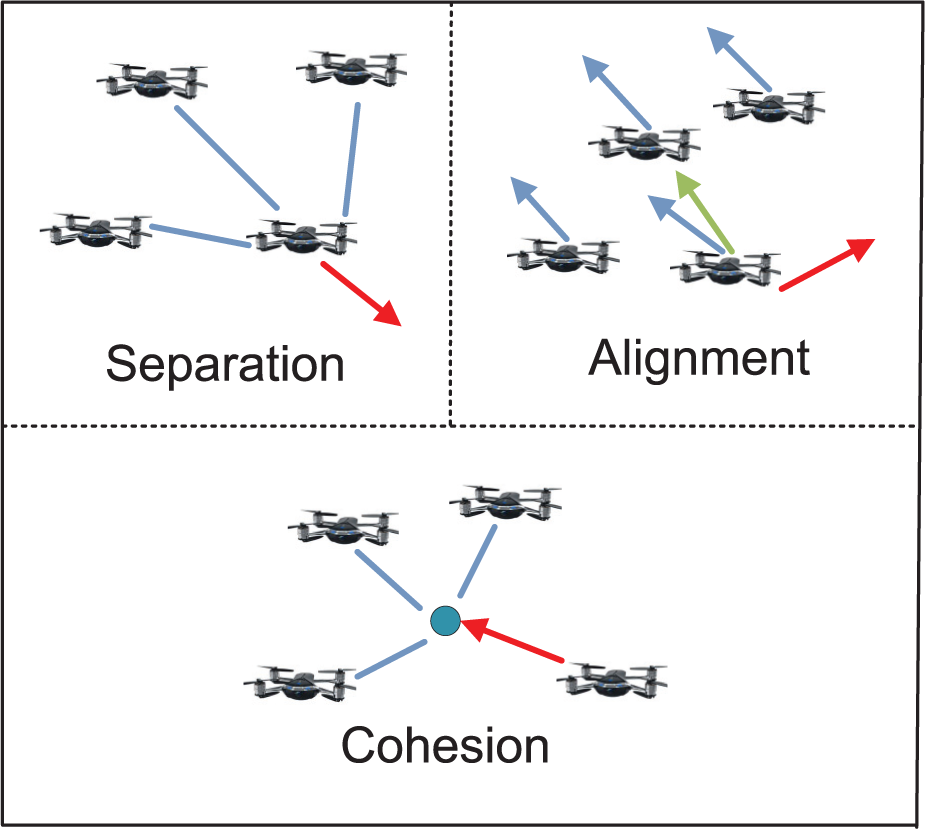
DA swarm patterns for drone cluster management in BICIoD.
Drone communication
For a connection establishment between a drone and an SGN, the SGN waits to be within the coverage range of a drone. When a drone senses an SGN within its coverage range, it will transmit an Identification (IDF) message. When the SGN receives the Identification (IDF) message from the drone, it will transmit an Acknowledgment (ACK) message as a reply to ensure successful recognition of a drone network. The drone after receiving ACK message from the SGN will transmit clear to send (CTS) message to the SGN. After receiving CTS, the SGN is ready to send data packets to the drone. This three-way handshaking between a drone and an SGN ensures connectivity as shown in Figure 7 and a drone is ready to receive the data packet from SGN.

Handshaking between drone and SGN.
When a drone receives a data packet from SGN, there is a need for an efficient routing mechanism and optimal route selection for transmission of data to BS. In the proposed BICIoD, all the drones follow the position of CH and adjust their position accordingly. The optimal route is selected based on the residual energy and position of drone for load balancing and congestion control. The drone which lies in the neighborhood range of the source drone and has the best position (that is near to the source drone) with higher residual energy will be considered for the next hop. The proposed working mechanism is shown in Figure 8. The routing of data packets that occurs using this optimal route will lead to lower energy consumption of the network and consequently increases the cluster lifetime.

Working mechanism of communication between drones.
Results and discussion
The proposed scheme BICIoD is evaluated on the basis of cluster building time, energy consumption, cluster lifetime, and probability of delivery success compared with GWO 32 and ACO 31 clustering algorithms. The simulations are performed in MATLAB with varying grid size and number of drones in a network. Rest of the parameters are given in the Table 1.
Simulation parameters.

The time taken by the clustering algorithms from taking nodes with their corresponding fitness value as input to producing outputs the election of CH and associate member nodes is called as cluster building time which represents the computational complexity of that algorithm. As drones have low computational resources, higher cluster building will affect its performance. Higher cluster building time also increases the energy consumption resulting in lower cluster lifetime. From Figures 9 to 11, it can be seen that the insertion of more drones into the network results in higher cluster building time. The proposed BICIoD outperforms GWO and ACO as our proposed scheme takes less time in building a cluster. This lower cluster building time reduces the delay for optimal route selection resulting in energy saving during complex computations. The results indicate that BICIoD has improved 60% and 38% average cluster building time as compared to ACO and GWO, respectively.

Cluster building time versus number of drones

Cluster building time versus number of drones

Cluster building time versus number of drones
The total energy consumption is the energy consumed by the algorithm for the whole network. There are three main mechanisms which consume energy in drones: energy needed to operate drone, energy consumed by the sensors mounted on the drone, and energy consumed in communication which is also the main source of energy consumption. From Figures 12 to 14, it can be seen that increasing the number of drones in the network consumes more energy. From the results, it is clear that our BICIoD performs better as compared with the other two clustering schemes. Lower energy consumption of our proposed scheme is because of the energy aware CH election and cluster management. It can be noted that the average energy consumption of BICIoD has improved 23% and 33% when compared with that of ACO and GWO, respectively.
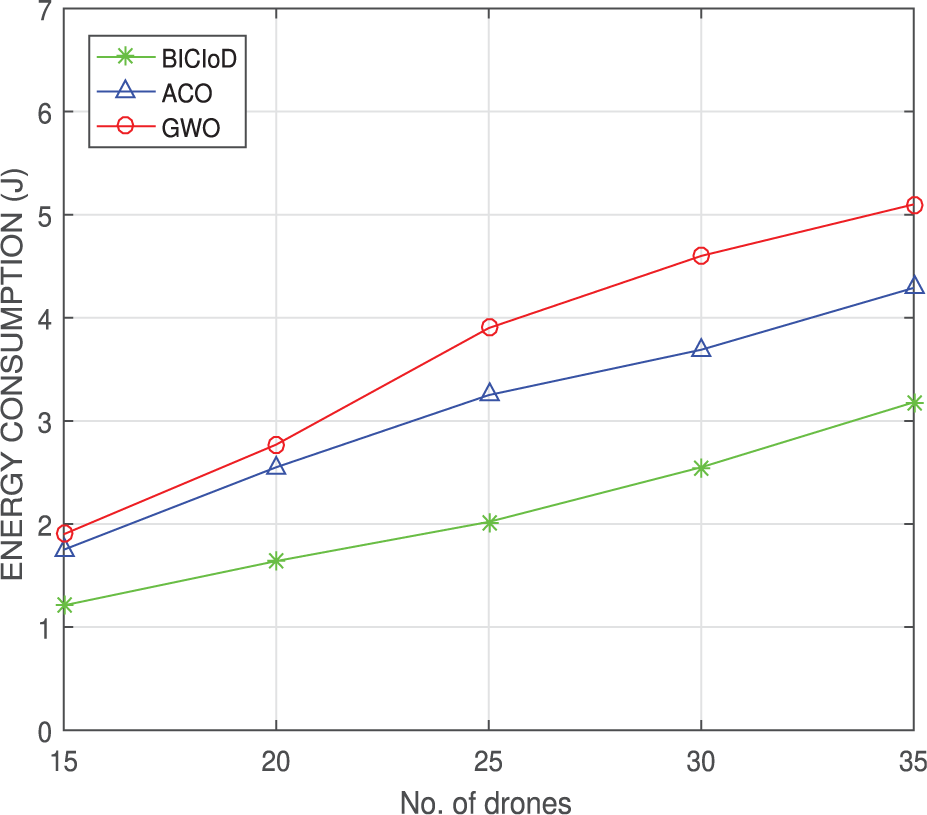
Energy consumption versus number of drones

Energy consumption versus number of drones
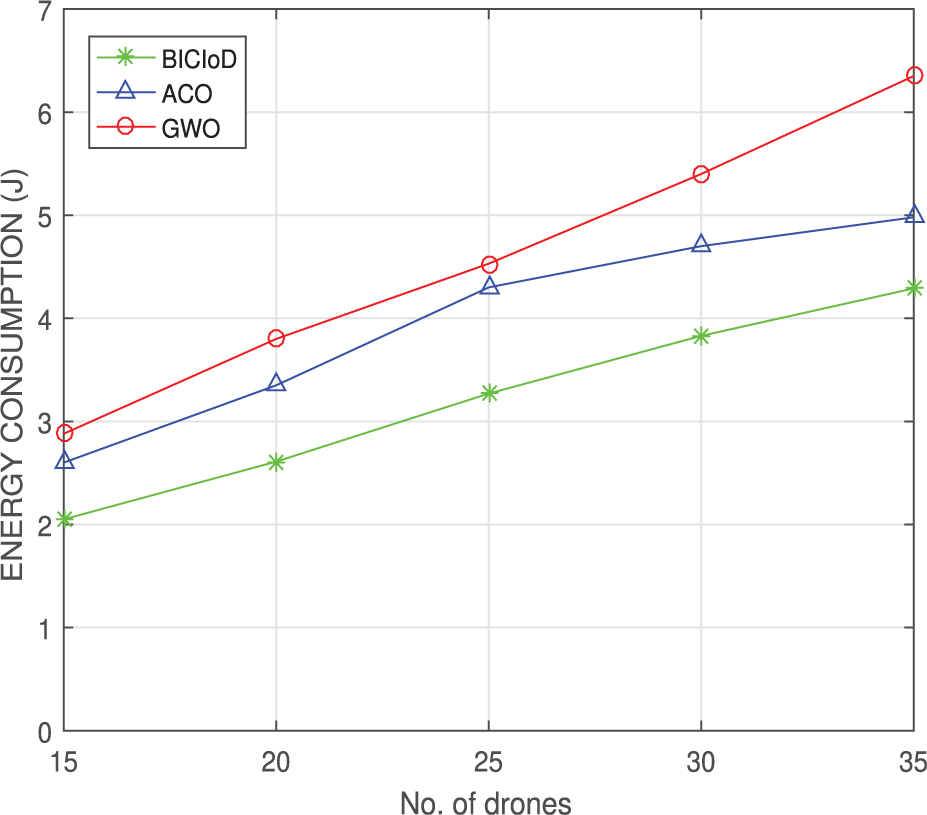
Energy consumption versus number of drones
The cluster lifetime is the total time for which the cluster is from till its disposition. During clustering, the drone with the highest fitness is elected as the CH and then it takes the responsibility of managing the whole cluster. Over time, the performance of CH degrades due to the operations and when it falls below the threshold level, the CH re-election takes place. Shorter cluster lifetime means the clustering algorithm frequently needs to be executed resulting in the increase in communication as well as computational overheads in the network. Figures 15–17 show that our BICIoD performs better than GWO and ACO. It can also be seen from the graphs, with the insertion of more drones, that the cluster life time decreases. This is due to the fact that as there are more members in a cluster, it causes the topology to change more frequently. From the results it can be seen that the overall network lifetime of BICIoD has improved 1.1 times and 1.3 times as compared to ACO and GWO, respectively.

Cluster lifetime versus number of drones

Cluster lifetime versus number of drones

Cluster lifetime versus number of drones
Probability of successful delivery is how successfully the packets are delivered at all intermediary nodes on the basis of the average hop count per packet. From Figure 18, it can be seen that BICIoD performs better when compared with ACO and GWO in terms of probability of successful delivery. With the increase in the number of drones in a network, the network density increases and hence probability of successful delivery increases. This is due to the fact that with the insertion of more drones in a network, the packet drop ratio decreases.

Probability of successful delivery versus number of drones.
Conclusion and future work
In this article, we proposed bio-inspired clustering scheme for IoD. The main issue of routing in IoD is that the drones are mobile in nature, hence causing frequent topology changes. We optimized the topology for efficient communication in IoD by means of efficient CH election based on the connectivity with the BS along with the residual energy and position of the drones. The cluster is managed according to the DA by updating the position of the drones. Furthermore, for route selection we propose an optimal path selection based on the residual energy and position of drone for efficient communication. The results of our proposed BICIoD are compared with ACO and GWO clustering algorithms. The results show our BICIoD has better performance as compared with the other bio-inspired clustering algorithms in terms of cluster building time, energy consumption, cluster lifetime, and probability of successful delivery. The results indicate that the proposed scheme has improved 60% and 38% with respect to ACO and GWO, respectively, in terms of average cluster building time while average energy consumption has improved 23% and 33%, when compared to ACO and GWO, respectively. In the future work, we will improve the overall performance of the proposed scheme by using hybrid methodology.
Footnotes
Handling Editor: Sadik Gharghan
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Key Project of the National Natural Science Foundation of China under Grant 61431001, in part by the Open Research Fund of National Mobile Communications Research Laboratory, Southeast University, under Grant 2017D02, in part by the Key Laboratory of Cognitive Radio and Information Processing, Ministry of Education, Guilin University of Electronic Technology, in part by the Foundation of Beijing Engineering and Technology Center for Convergence Networks and Ubiquitous Services, and in part Beijing Institute of Technology Research Fund Program for Young Scholars.