
Abstract
The accidental fall is the major risk for elderly especially under unsupervised states. It is necessary to real-time monitor fall postures for elderly. This paper proposes the fall posture identifying scheme with wearable sensors including MPU6050 and flexible graphene/rubber. MPU6050 is located at the waist to monitor the attitude of the body with triaxial accelerometer and gyroscope. The graphene/rubber sensors are located at the knees to monitor the moving actions of the legs. A real-time fall postures identifying algorithm is proposed by the integration of triaxial accelerometer, tilt angles, and the bending angles from the graphene/rubber sensors. A volunteer is engaged to emulate elderly physical behaviors in performing four activities of daily living and six fall postures. Four basic fall down postures can be identified with MPU6050. Integrated with graphene/rubber sensors, two more fall postures are correctly identified by the proposed scheme. Test results show that the accuracy for activities of daily living detection is 93.5% and that for fall posture identifying is 90%. After the fall postures are identified, the proposed system transmits the fall posture to the smart phone carried by the elderly via Bluetooth. Finally, the posture and location are transmitted to the specified mobile phone by short message.
Keywords
Introduction
With the progressive aging of population, the daily healthcare of the elderly has been in great demand. The physiological function of the elderly declines as the age increasing and the accidental fall was a great threat affecting the health and even life of the elderly. 1 In the event of an accidental fall, it may lead to more serious injury unless it is treated timely. 2 Therefore, it is urgent to study real-time monitoring methods that accurately identify fall postures for elderly and promptly inform the doctor and family member so as to minimize the damage caused by the fall.
The main methods for detecting human fall include video analysis, environmental variable analysis, and wearable device. 1 With video analysis method, one or multiple video cameras are usually installed in the elderly activity areas to determine whether the elderly falling occurs via certain image processing techniques.3–7 The environmental variable analysis method uses one or more sensors to detect environmental changes in a certain space to collect information of the body so as to determine whether the falls occur. The commonly used sensors include infrared sensors, 8 audio sensor,9,10 vibration sensor,11,12 radio frequency (RF) signal,13,14and so on. However, there are some problems in the previous methods, such as limited monitoring region, privacy exposure, cost inefficient, and vulnerable to the environment.
With the miniature of the electronics and the development of micro-electro-mechanical system (MEMs) sensors, wearable devices are more attractive for elderly fall detection. C-F Lai et al. 15 proposed an adaptive body posture analysis for elderly falling detection by using collaborative accelerometer sensors. J Wang et al. 16 proposed an enhanced fall detection system for elderly person monitoring based on an accelerometer, cardiotachometer, and smart sensors. P Pierleoni et al. 17 proposed a fall detection system consisting of an inertial unit including triaxial accelerometer, gyroscope, and magnetometer with efficient data fusion and fall detection algorithm. AT Özdemir 18 conducted 2520 tests to determine the best sensor placement location on the body. Result showed the waist region was the most suitable location for sensor placement on the body. PV Er and Tan 19 presented a health condition monitoring solution that detected an elderly accidental fall occurrence with the accelerometer and the sound sensor. A fuzzy logic-based fall detection algorithm was developed to process the output signals from the accelerometer and the sound sensor. Gia et al. 20 proposed the fall detection system with sensing nodes collecting such parameters as accelerometer, gyroscope, magnetometer, humidity, and temperature. The energy consumption of the wearable sensor nodes in different configurations was evaluated. Using the data from the accelerometer of the smart phones, L García et al. 21 detected changes in the behavior of users considering the x/y/z axial accelerometer while the smart phone is in pocket and in hand. Considering the user’s acceptability issue, L Montanini et al. 22 presented a methodology for fall detection that relied on a pair of smart shoes that was equipped with force sensors and a triaxial accelerometer to detect a fall and notify it to a supervising system.
With the development of miniaturization, high performance, and less weight of sensors, carbon nano-materials have attracted widespread attention. In 2004, KS Novoselov et al. 23 first discovered a novel two-dimensional (2D) atomic crystal: graphene, which was a 2D carbon nano-materials composed of carbon atoms with excellent optical, electrical, and mechanical properties. Consequently, the performances of graphene on electronics,24,25 mechanics, 26 and thermotics 27 were studied. The rubber was a highly elastic polymer material that had reversible deformation at room temperature. After adding additives such as reinforced filters, the rubber would be a kind of functional material. As a nano-filler, graphene was an excellent additive to reinforce the performance of the rubber.28,29 Boland et al. incorporated graphene into the rubber in order to enhance the rubber conductivity for monitoring joint and muscle motion. 30 After the functional modification by graphene, the rubber exhibited good sensitivity in electrical and mechanical properties.
In this study, we prepared the graphene/rubber sensor for the purpose of fall posture identification. The real-time monitoring scheme is established and the fall posture identification method is designed with flexible graphene/rubber sensor and MPU6050. The graphene/rubber sensor is bent with the knees so as to detect the bending state. MPU6050 is used to detect the triaxial acceleration and tilt angle of the body. The real-time fall posture identifying algorithm is proposed by the incorporation of MPU6050 and graphene/rubber sensors. Test results show the high accuracy for identifying elderly fall postures and illustrate the effectiveness of the proposed method.
The rest of this work is organized as following. In section “Sensors for fall posture identification,” the sensors for fall posture identification are described. In section “Methods,” the fall posture identifying scheme and the fall posture identifying algorithm are discussed. The results and discussion are presented in section “Results and discussion.” In the last section, some meaningful conclusions are drawn.
Sensors for fall posture identification
This section presents the descriptions of the two sensors for fall posture identifying scheme. The process of preparing graphene/rubber sensor is described and the performance of MPU6050 is introduced.
The graphene/rubber sensor
The graphene/rubber sensor used in this study is the composite of graphene and EPDM (ethylene propylene diene monomer). The detailed processes for preparing the graphene/rubber include:
Dissolve the graphene powder with acetone.
Process the solution with ultrasound for 1 day.
Dissolve EPDM (30P2E, Shenyang Aircraft Co. Ltd., China) with toluene.
Mix the EPDM solution with the graphene solution, then mechanically agitating for 6 h while the spinning speed is 200 rpm.
Sonicate the mixed solution for 3 h at 30°C to achieve the uniform solution.
Pour the uniform solution onto a flat glass plate and heat it for 1 h at 110°C in the vacuum oven in order to remove toluene.
Strip the graphene/rubber composite from the plate.
Vulcanize graphene/rubber under 10 MPa at 170°C for 10 min in the vulcanization machine.
The graphene/rubber film is cut into several rectangular pieces of 10 mm × 20 mm by a mold. After the piece is placed on the surface of the glass, the wires were fixed at both ends of the film with a clip. Then, the conductive silver paste was applied to fix the two wires in a drying oven at 80°C. After 20 min, the graphene/rubber sensor can be used for fall monitoring by fixing with a medical tape (Figure 1).

Graphene/rubber sensor.
MPU6050
The MPU6050 (designed and manufactured by Invensense Company) includes MEMs gyroscopes, MEMs accelerometers, digital motion processor (DMP), and analog-digital converter (ADC) to perform the six-axis motion detection. With inter-integrated circuit (I2C) interface, it can connect the third-party digital sensor (usually connect the three-axis magnetometer) (Figure 2). The MPU6050 is highly integrated while reducing the packaging space. With anti-interference ability and lower power consumption compared with traditional motion sensors, it reduces the interaction between gyroscopes and accelerometers, improves the measurement accuracy. Therefore, the MPU6050 satisfies the requirement for fall posture identifying.

The MPU6050 module.
Methods
This section presents the fall posture identification scheme including sensors, microprocessor, smart phone, and so on. The fall posture identifying algorithm is designed in this section.
Fall posture identification scheme
The fall posture identification system mainly has such functions as real-time identifying body posture, providing location information, and sending alarm signal. The system includes MPU6050, graphene/rubber sensor, Bluetooth, main controller, alarm module, power module, and monitoring smart phone. Figure 3 shows the scheme of the monitoring system.

The fall posture identification scheme.
The central unit of the scheme is developed with MSP430F149, which is an ultra-low power 16-bit single chip microcomputer designed and manufactured by TI Company. It has the characteristics of low working voltage, ultra-low power consumption, fast recovery, in-chip ADC, and so on. The MPU6050 is located at the waist as AT Özdemir 18 recommended. The microprocessor collects the output signals of the MPU6050 by I2C interface and the graphene/rubber sensors by in-chip ADC in real time, and determines whether a fall action occurs through the integration fall detection algorithm with MPU6050 and graphene/rubber sensors. When the fall action is recognized, the light alarm reminds the user and the monitoring smart phone carried by the elderly will send a short message with fall posture and the position information to the emergency center and the family member. The central unit is about 70 mm × 70 mm and is powered by four double A batteries with 1500 mA h. Considering the power consumption of the system, the maximal power consumption of the Bluetooth is 8.29 mA when it continuously transmitting data to the smart phone. MPU6050 consumes 5 mA current and the graphene/rubber sensor consumes less than 1 mA. The maximal consumption of the MSP430F149 is only 0.4 mA. The total consumption of the proposed system is less than 15 mA when it continuously transmits data with the Bluetooth. Therefore, the proposed system can working for more than 4 days. The proposed fall detection system is shown in Figure 4.

The proposed fall detection system.
Fall posture identification algorithm design
Considering the location of the graphene/rubber sensor, the joint is suitable for its bending degree reflecting the body state. We have studied the joints of the body including the elbow, the knee, angle, and even the finger. Among these joints, knee is the most suitable location for fall detection. Using other joints, fall postures are easily confused with activities of daily living (ADL).
The three-dimensional coordinate system is established with MPU6050 in Figure 5.

Location of the sensors and the coordinate system of the body.
A fall is a sudden, intense, and transient action of the body. Usually, the postures of the body fall mainly include: forward fall down, forward fall on the knees, backward fall down, backward fall ending up sitting, lateral left fall, and lateral right fall. This study mainly considers the following ADL that are easily confused with fall behavior: walking, ascending upstairs, descending downstairs, and leaning over. This paper examines how to effectively distinguish fall posture from ADL and discriminate the fall postures. During the fall, the body’s tilt angle changes with acceleration. Sudden changes in acceleration and tilt angle can be used as the important quantitative indicators for monitoring fall action. 17
Consider the accelerations

SMV is an important parameter to distinguish the state of motion of the body: the small SMV indicates the smooth movement of the body; the large SMV indicates the intense movement of the body. 16 When the body fall occurs, it will impact the ground with the peak acceleration. Therefore, the threshold can be used to determine whether the fall action occurs. Suppose TH1 is the threshold of the SMV and TH2 is the threshold of the tilt angle. By double determinations with acceleration and tilt angle, body fall postures can be distinguished more accurately. However, backward fall ending up sitting and forward fall on the knees are discriminated as backward fall down and forward fall down, respectively. In order to identify more fall postures, this paper proposes a novel method with MPU6050 and graphene/rubber sensors, which can further distinguish the backward fall ending up sitting and forward fall on the knees. Suppose TH3 is the threshold of graphene/rubber sensor; the integration algorithm with SMV, title angle, and knee bending ratio is proposed to identify ADL and fall postures. The algorithm is presented in Figure 6.

The fall posture identification algorithm.
Six fall postures can be identified in real time by the proposed algorithm. Without the graphene/rubber sensors, the algorithm just distinguishes lateral left fall, lateral right fall, forward fall down, and backward fall down based on MPU6050. Integrated with graphene/rubber sensors, backward fall ending up sitting, forward fall on the knees can be identified accurately. With 8M external crystal oscillator and the maximal 200k sampling rate of the internal 12-bit A/D, the central unit MSP430F149 can implement the identifying algorithm in 1 ms.
Results and discussion
This section first studies the performance of graphene/rubber with ending tests. Then, fall posture identifying tests are performed with MPU6050 and graphene/rubber, respectively. Finally, the corporation of two sensors is used to identify fall postures. Test results from different scheme are compared and discussed.
Characterization of graphene/rubber
Garphene/rubber sensor exhibits excellent electrical and mechanical properties such as 104-fold increase in resistance and working at strains exceeding 800%. 30 It is the suitable sensor for body motions including ADL and fall postures. It can easily bend with small external force, and can resume its original state after removing external force. To test the flexibility and bending detection performance of the graphene/rubber sensor, Figure 6 presents the bending between 0° and 180°. The FLUKE 2638A digital multimeter with data logging capabilities is used to measure the electrical resistance of the sensor during the tests. Prior to mechanical testing, the initial electrical resistance (R0) was recorded for 10 s to guarantee stability of the readings. After the data is processed by Origin, the resistance change rate of graphene/rubber sensor is presented in Figure 7.

Bending test of the graphene/rubber sensor.
Fall monitoring with MPU6050
In order to achieve the rules of acceleration and tilt angle change during the fall, the fall posture identification system was located at the waist of the volunteer, who is 25 years old, male, 65 kg weight, 170 cm height. The body character is very popular in China so as to emulate the elderly fall postures. The proposed system collects the volunteer’s triaxial angles and accelerations, which are used to compute SMV.
Figure 8 shows that SMV is about 1 g when body is stationary. When fall occurs, SMV decreases and consequently increases to the peak. Afterwards, it decreases to the normal state 1 g. The duration of the whole process is about 2 s. When the volunteer falls to the ground, SMV reaches the peak 2.84 g or so. After the fall action, SMV decreases to 1 g quickly. Compared with plots of SMV in Figure 9, Figure 10 shows that the SMVs of walking, ascending upstairs, descending downstairs, and leaning over are all less than 2 g. In order to distinguish fall from daily behaviors, this study sets the threshold TH1 as 2.0 g.

The resistance change of the graphene/rubber sensor.

The SMV plot of lateral left fall.
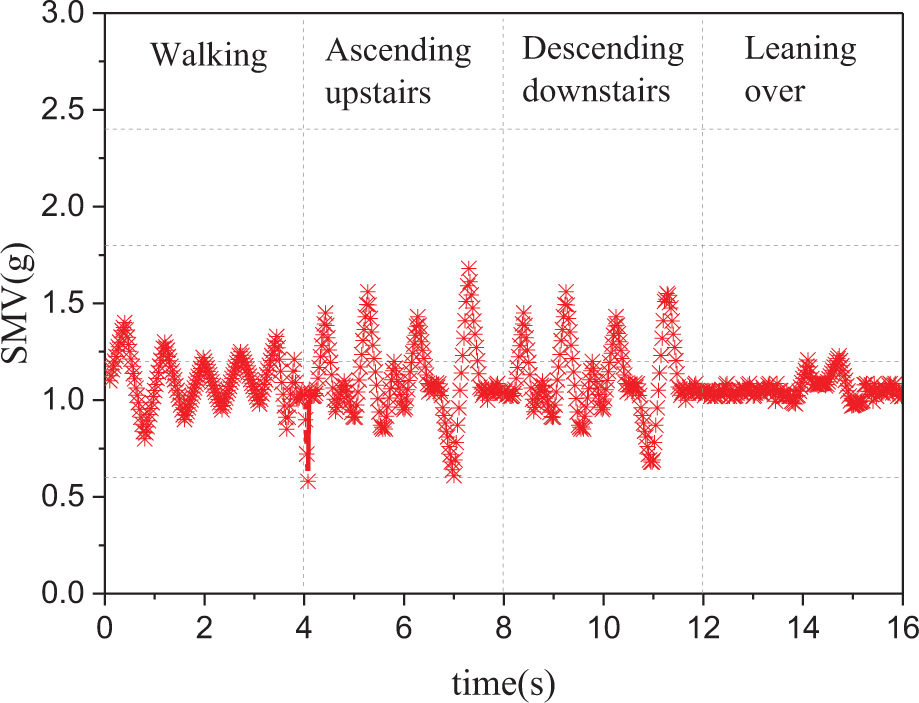
The plots of SMV of ADL.
Besides triaxial acceleration, the tilt angle of the body is also considered for fall posture identification. Figure 10 shows that the tilt triaxial angles of the body are less than 10° when the body is in an upright state. The tilt angle of the x-axis is greater than 60° in the process of the lateral left fall while tilt angles in the y-axis and z-axis remain normal state. Therefore, the angles of the gyroscope are introduced so as to improve the fall identification accuracy. Therefore, set TH2 60° as the second indicator for fall identification. To illustrate TH1 and TH2, the volunteer emulates the ADL including walking, ascending upstairs, descending downstairs, and leaning over for 30 times. The acceleration and tilt angles are collected by the fall posture identification system. The test results of SMV and tilt angle are presented in Table 1.
The analysis of motion state.

SMV: signal magnitude vector.
The SMV from walking, leaning over, going upstairs, and downstairs are less than TH1. Therefore, they are not classified as fall postures. The SMVs from forward fall on the knees, forward fall down, backward fall ending up sitting down, backwards fall down, lateral left fall, and lateral right fall are greater than TH1. Meanwhile, tilt angles from them are greater than 60°. If only utilizing the MPU6050, forward fall, backward, lateral left fall, and lateral right fall are identified based on SMV and tilt angle. With the wearable graphene/rubber sensors, forward fall can be classified as forward fall on the knees and forward fall down. Meanwhile, backward fall can be classified as backward fall ending up sitting and backward fall down. Two more fall postures are distinguished with the integration algorithm based on MPU6050 and graphene/rubber sensors.
Fall posture identification with graphene/rubber
To test the responses of the graphene/rubber sensor, some experiments are conducted when considering the ADL and fall postures. Test results are presented in Figures 11 and 12.

The plots of triaxial angels while lateral left fall.

The resistance change of the graphene/rubber sensor in ADL.
It is clear that
Fall posture identification with MPU6050 and graphene/rubber sensors
The system transmits data from the MPU6050 to the MSP430 via I2C, meanwhile MSP430 collects resistance change from graphene/rubber sensors. Consequently, MSP430 performs the fall identification algorithm. Based on the identifying algorithm in Figure 13, the first process is to determine whether SMV is greater than 2.0 g. The second process is to determine whether the tilt angle is greater than 60°. Finally, integrated with the graphene/rubber sensors, more fall postures are discriminated accurately.

The resistance change of the graphene/rubber sensor in fall postures.
In order to verify the fall posture identification method, the volunteer emulates four ADL and six fall postures. Input the user information and monitoring mobile phone number into the system before the experiments. When the system sends an alarm message, the monitoring mobile phone can receive a short message including the fall posture and the location. After the experiments are completed, the test results are presented in Tables 2 and 3, respectively. Among the 200 ADL identifying tests, 13 tests are identified as fall postures and 187 tests are correctly identified as ADLs. The accuracy is (187/200) × 100% = 93.5%. Among the 300 fall postures identifying tests, 30 tests are identified as other fall postures and 187 tests are correctly identified as the corresponding postures. The accuracy is (270/300) × 100% = 90%.
ADL identifying results with MPU6050 and graphene/rubber.

Fall posture identifying results with MPU6050 and graphene/rubber.

Among ADLs, walking is easily confused with fall postures and widely considered in other literatures3–20 when proposing fall detection systems. The accuracy for detecting walking in this study is 98%. Lai et al. 15 presented the accuracy for identifying walking as 98.95%, the proposed method utilized collaborative accelerometer sensors including neck sensor, waist sensor, left-wrist sensor, right-wrist sensor, left-thigh sensor, and right-thigh sensor. With single sensor, the accuracy for identifying walking was 90%. Er and Tan 19 also presented the accuracy for walking detection as 97.5% with fuzzy logic-based algorithm, the accuracy is 87.5% only with accelerometer algorithm. The accuracy for leaning over detection is 92% while 8% are discriminated as fall postures. Although literatures16,17 achieved the best accuracy 100% for identifying walking, they used more sensors or more complex algorithm.
The accuracy for ascending upstairs detection and descending downstairs detection in this study are 92% and 90%, respectively. The total accuracy for ADL detection is 93.5%. The comparison results with other wearable sensor-based literatures15–17,19 for identifying walking are presented in Table 4.
Comparison results for walking identifying with other literatures.

Among the fall postures, the lateral left fall and the lateral right fall are identified very accurately with accuracy 100%, which demonstrates that MPU6050 is ideal for identifying lateral fall. The accuracy for identifying forward fall down is 88% while 12% are discriminated as forward fall on knees. Meanwhile, the accuracy for identifying backward fall down is 86% while 14% are discriminated as backward fall ending up sitting. By contrary, the accuracy for identifying forward fall on knees is 84% while 16% are discriminated as forward fall down, and the accuracy for identifying backward fall ending up sitting is 82% while 18% are discriminated as backward fall down. Considering the complex fall postures including backward fall ending up sitting and forward fall ending up on knees or similar fall postures, the comparison results with literatures15–17,20 for fall postures identifying are presented in Table 5.
Comparison results for fall postures identifying with other literatures.

Lai et al. 15 presented the accuracy is 90% for identifying lying down while it is 98.95% for identifying sitting. Wang et al. 16 also presented the best accuracy is 100% for identifying backward fall seating on ground while it is 92.2% for identifying forward fall landing on knees. For the complexity of backward fall ending up sitting, the best algorithm in Pierleoni et al. 17 presented the accuracy for identify backward fall ending up sitting is only between 16.7% with five algorithms. The total accuracy for identifying fall postures is 90%. Gia et al. 20 presented the accuracy is 81% for identifying backward fall finishing sitting while it is 100% for identifying forward fall finishing on knees. In our study, forward fall postures and backward fall postures cannot be further classified without the graphene/rubber sensor. Therefore, the graphene/rubber is a very important sensor for identifying more fall postures. In addition, the novel wearable graphene/rubber sensor is incorporated with MPU6050 so as to identify more fall postures. Compared with the wearable sensor for fall detection in previous works,15–20 this study presents a simple algorithm with few sensors so as to implement fall detection in real time.
In our study, the accuracy for identifying ADL is different from that for identifying the fall postures. For the SMV and tilt angles are more suitable for ADL detection, identifying accuracy is more than 90%. Considering the fall postures, it is difficult to discriminate the similar fall postures such as forward fall on knees and forward fall down. The same occurrence exists for backward fall ending up sitting and backward fall down. Therefore, the accuracy for identifying forward fall and backward fall is less than 90%. Finally, the total accuracy for identifying ADL is greater than the accuracy for identifying fall postures.
Conclusion
This paper focuses on the elderly fall identifying, and establishes a wearable fall posture detection scheme. After ADL and fall postures have been committed to test the fall posture identifying method, some meaningful conclusions can be drawn:
With MPU6050 and the graphene/rubber sensor, the proposed scheme has the identifying accuracy 93.5% for ADL and 90% for fall postures. The average accuracy is 91.4%.
The graphene/rubber sensor is a better tool to identify the fall forwards and backwards for the flexibility and resistance response to the knee bending. With this sensor, more forward fall postures and backward fall postures can be identified based on the proposed identifying algorithm.
The fall posture detection system can identify the fall postures based on MPU6050 and the graphene/rubber sensors. The fall posture and location are transmitted to the specified mobile phone via short message.
In the future, the elderly fall posture detection scheme may be established with Internet so that the emergency center and the user’s family member could provide necessary help to the elderly more efficiently.
In the process of testing the identifying algorithm, we find that the more quick moving action, the lower identification accuracy. Therefore, further study should focus on the quick moving actions and apply novel sensor and improve the identifying algorithm.
Footnotes
Handling Editor: Yanjiao Chen
Authors’ contributions
All the authors have participated in writing the manuscript. All authors read and approved the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the Shenyang science project Z18-5-16.
Data accessibility statement
Please contact author for data requests.