
Abstract
It is beneficial for maintenance department to make maintenance strategy and reduce maintenance cost to forecast the hidden danger index value. Based on the analysis of the research status of wheel-to-life prediction at home and abroad and the repair of wheel-set wear and tear, this article designs and implements an adaptive differential evolution algorithm Levenberg–Marquardt back propagation wheel-set size prediction model. Aiming at the shortcomings of back propagation neural network, it is easy to fall into local extreme value. The back propagation algorithm is improved by Levenberg–Marquardt numerical optimization algorithm. Aiming at the shortcomings of back propagation neural network algorithm for randomly initializing connection weights and thresholds to fall into local extreme value, the differential evolution algorithm is used to optimize the initial connection weights and thresholds between the layers of the neural network. In order to speed up the search of the optimal initial weights and thresholds of the differential evolution algorithm Levenberg–Marquardt back propagation neural network, the initial values are further optimized, and an adaptive differential evolution algorithm Levenberg–Marquardt back propagation wheel-set size prediction model is designed and implemented. Compared with the proposed combine adaptive differential evolution algorithm with LMBP optimization (ADE-LMBP) is effective and significantly improves the prediction accuracy.
Keywords
Introduction
With the increasing mileage of high-speed railways in China, railway train safety inspection is becoming more and more important. Any minor fault in the train components may affect the safety of high-speed trains and even cause major safety accidents. The wheel pair is called one of the three major consumable parts of the train, and the wear condition of the rim and the tread is a key factor affecting the safe and stable operation of the train, the ride comfort, and the service life of the wheel track.1,2 As the train causes continuous wear of the wheel-set during the operation, the related expenses of maintenance and repair such as repairing or replacing it in time are one of the important components of the train maintenance cost. 3 Therefore, on the basis of mastering the historical state of the wheel-set, predicting the hidden danger index of the wheel-set is beneficial to the railway management department to formulate effective maintenance measures in time to improve the operational safety, reliability, and economy of the train.
In the railway transportation and development, the wheel-set wear phenomenon of railway vehicles is widely existed in various transportation sites, which is also one of the main research directions in recent years. At present, the research on the modeling of railway wheel-set state prediction at home and abroad is mainly divided into two categories. The first type is based on the vehicle track system dynamics model, the wheel–rail local contact model, and the local wear analysis mechanism model of the wheel–rail material, involving physical quantities such as wear and creep distance, normal force, and material hardness. Then, the numerical simulation analysis of the train wheel wear profile information is carried out.4–7 The other is to analyze and predict the historical wear profile information obtained from the statistics and calculate the remaining service life of the wheel-set to propose a maintenance strategy, such as the time series model, 8 support vector machine, 9 gray prediction algorithm, 10 and Bayesian algorithm. 11 With the advent of the era of data explosion, big data technology and numerical analysis methods have gradually been applied to various device security predictions. Among them, neural network algorithms are widely used. Gebraeel et al. 12 developed an experimental device to perform accelerated bearing testing to obtain bearing vibration data samples and based on back propagation (BP) neural network to establish a bearing residual life prediction model and verify its effectiveness. Wei Zhang et al. 13 established a three-layer BP neural network for multi-stress accelerated life test, which can effectively predict the failure time of the normal stress level and obtain the prediction curve of reliability function. However, the traditional BP neural network converges slowly and is easy to fall into local optimum. Therefore, scholars will improve the BP algorithm or use some other algorithms combined with BP neural network to improve the shortcomings of BP. In terms of algorithm combination, Lixin et al. 14 used a combination of time series analysis and BP neural network to predict the remaining life of the cooling fan and improve the prediction accuracy. He and Zhang 15 proposed a combination of principal component analysis (PCA) and BP neural network to provide a good reference for the prediction of phosphorus content in basic oxygen furnace (BOF) endpoint. In terms of algorithm improvement, Zhang et al. 16 used genetic algorithm to globally optimize the weight of BP neural network. The results of tool residual life show that the prediction effect is better than the single BP neural network method. Zhaoyang Ye and Kim 17 optimized the BP neural network with Levenberg–Marquardt (LM) algorithm to predict the power consumption of buildings. The results show that the Levenberg–Marquardt back propagation (LMBP) neural network is more accurate and stable than the BP neural network. Huaixian Yin et al. 18 used the particle swarm optimization algorithm to optimize the BP network to establish a prediction model for the axle-to-axle box failure of the urban rail train bogie, which is better than the BP neural network.
At present, the method for predicting wheel wear based on the dynamic model is mature, but most of them are based on simulation numerical analysis, and field data are not used. Based on the historical surface information data, there are few research studies on the method of wheel wear. Although the field data are used, the prediction accuracy is not high, and the algorithm combined with the global optimization and training process is less. In this article, based on the idea that the wheel diameter value changes with time to find useful information, the problem of wheel-set life is studied. The corresponding prediction model is established to predict the trend of wheel diameter change, which is used as an auxiliary method for the maintenance department to formulate maintenance strategy. In view of the shortcomings of BP neural network, that is, it is easy to fall into local extreme value, the LM numerical optimization algorithm is used to improve the problem. In view of the shortcomings of BP neural network algorithm for randomly initializing connection weights and thresholds to fall into local extremum, differential evolution algorithm (DE) is used to optimize initial connection weights and thresholds between layers of neural network. In order to speed up the search for the optimal initial weights and thresholds of the differential evolution algorithm Levenberg–Marquardt back propagation (DE-LMBP) neural network, the initial values are further optimized, and a design is implemented based on the adaptive DE-LMBP wheel-set size prediction model.
Theory
LMBP neural network algorithm
BP neural network is a multilayer feed forward neural network, which consists of an input layer, single layer or multilayer hidden layer, and output layer. For a single hidden layer BP neural network, the input layer contains
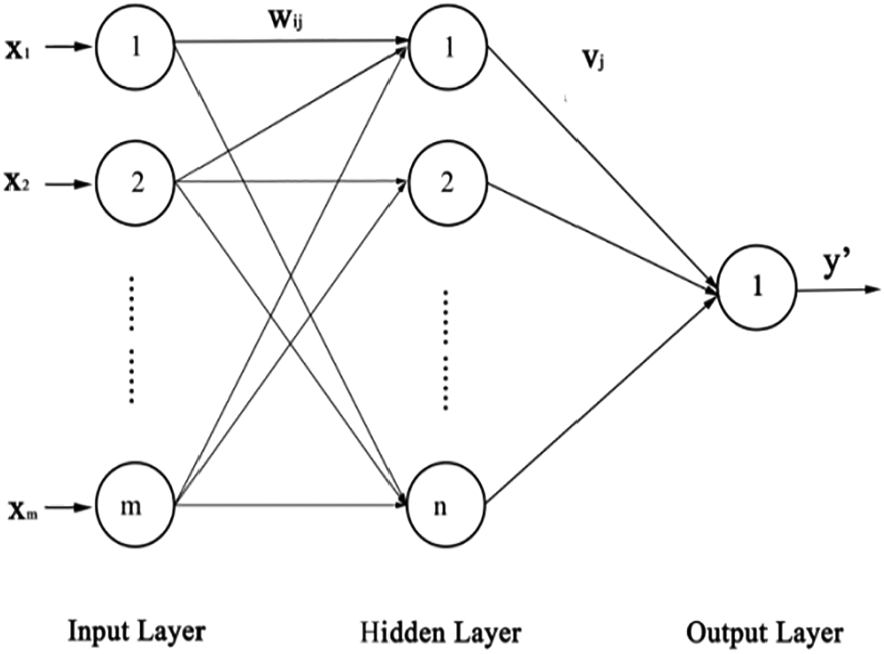
Topological structure of a single hidden layer BP network.
The weight matrix from the input layer to the hidden layer of BP network is marked as



The standard BP algorithm minimizes the sum of squares of errors between the expected output vectors of training samples and the actual output vectors of the network by adjusting the weight vectors and thresholds between the connecting layers. The sum of squares of errors is the objective function that the LM algorithm needs to optimize.
The LM algorithm is used to adjust the weights and thresholds of BP neural network. The formula is as follows

where
In the process of network training, with the increasing number of iterations, when
Differential evolution algorithm
The essence of DE 19 is a greedy algorithm based on real coding with the idea of preserving the best. The basic principle of the algorithm is to randomly select two individuals in the population to generate difference vectors and sum them with the third individual to generate new individuals (variant individuals), cross-operate the parent and the corresponding variant individuals, and select the individuals with better fitness between the parent and the offspring individuals, and these individuals with better fitness were selected as offspring.
DE mainly includes population initialization, mutation operation, crossover operation, and selection operation:
1. Population initialization
The three matrices

Let
2. Mutation operation
The mutation operation is based on individual vector difference. Assuming that the current evolutionary individual is

3. Cross-operation
The

where
4. Fitness function
The fitness evaluation is carried out by using the square error measure in the following form

where
5. Selection operation
Selecting

Repeat equations (2)–(5) until conditions are met.
Adaptive DE-LMBP algorithm
In order to speed up the search for the optimal initial weight and threshold of DE-LMBP neural network and further optimize the initial value, an adaptive DE-LMBP neural network model is proposed. The difference between the adaptive DE-LMBP neural network model and the DE-LMBP neural network model is that the crossover probability and mutation probability of the DE-LMBP neural network model are fixed values. The crossover probability and mutation probability of the adaptive DE-LMBP neural network model are adjusted with the individual fitness.
The key to the adaptive algorithm lies in the variation and crossover operation of the algorithm, that is, the dynamic adjustment of the cross-factor

Analysis of the above formula shows that the values of

where
When the crossover and mutation factors are adjusted according to formula (7), the probability of crossover and mutation is close to or equal to zero for individuals whose fitness is close to or equal to the maximum fitness. In this way, in the early stage of evolution, the good individuals are almost in a state of unchanged, but at this time, the good individuals are not necessarily the global optimal solution. The final crossover and mutation functions are obtained by the following adjustment

where
Evaluation index
In this article, mean absolute error (MAE), root mean squared error (RMSE), mean absolute percentage error (MAPE) and correlation coefficient R are selected as model evaluation indicators




where
Experimental procedures
The flowchart for predicting the change trend of wheel pair diameter based on improved adaptive DE-LMBP neural network is shown in Figure 2.
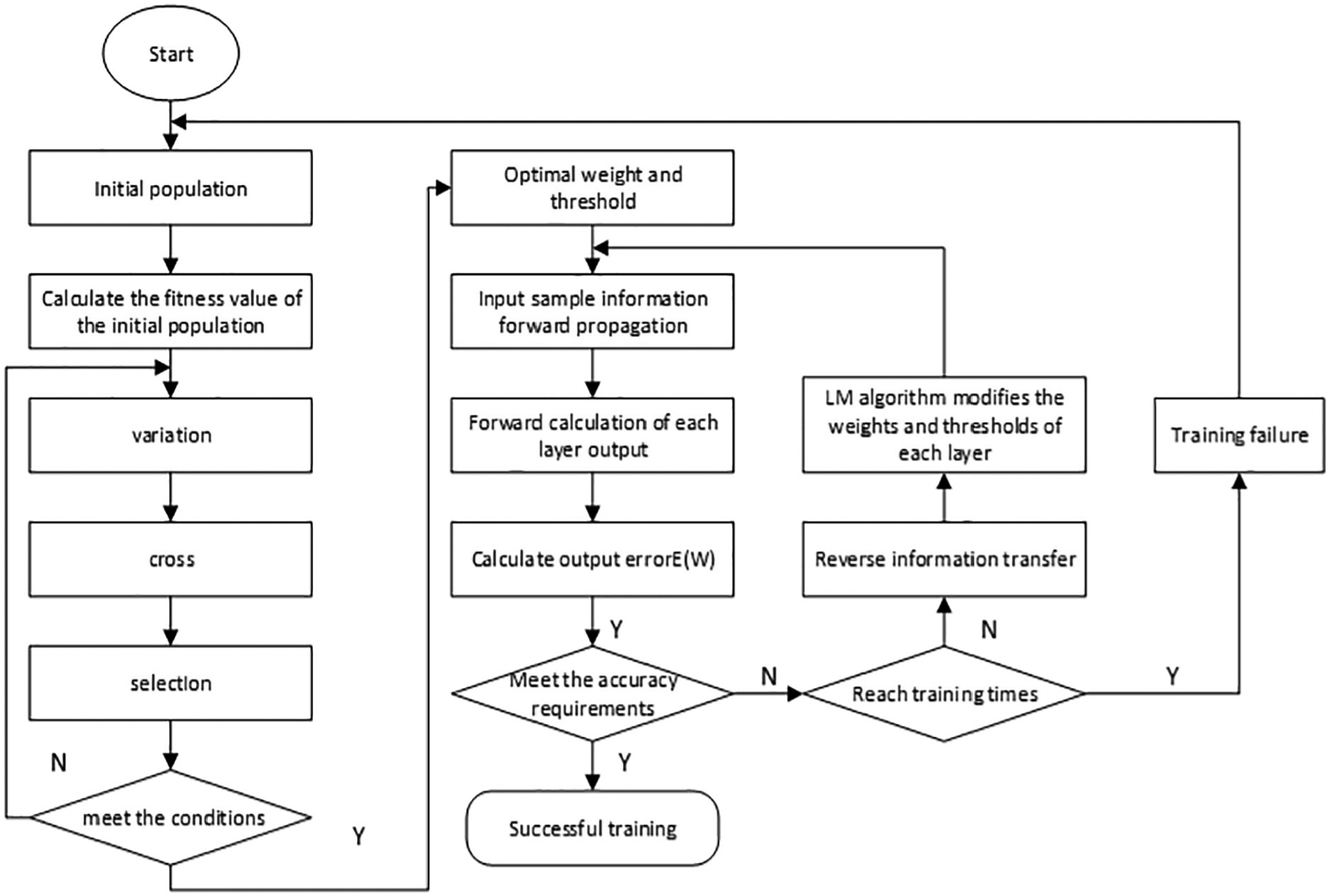
Adaptive DE-LMBP neural network prediction process.
According to Figure 2, we have designed the following wheel-set dimensional change trend prediction process as shown in Algorithm 1.

Data sample preparation
The data studied in this article comes from the LY series dynamic inspection system. As shown in Figure 3, it is installed on the operation line, or the entrance line of the electric multiple units (EMUs) will pass by. When the railway enters the detection area at a limited speed and triggers the detection sensor, the system enters the working state.

LY series dynamic inspection system for wheel profile.
The dynamic inspection system for wheel profile uses the “light intercept image measurement technology” to measure the wheel alignment size online. The principle is shown in Figure 4. When the railway enters the detection range, the laser line source is projected from both sides of the track to the wheel surface to form an optical curve and is captured by the CCD camera. Through real-time image acquisition, processing, and correction, the real contour curve is obtained, which the numerical calculation is performed to obtain the wheel size parameter. On this basis, numerical calculation is performed to obtain the wheel size parameter.
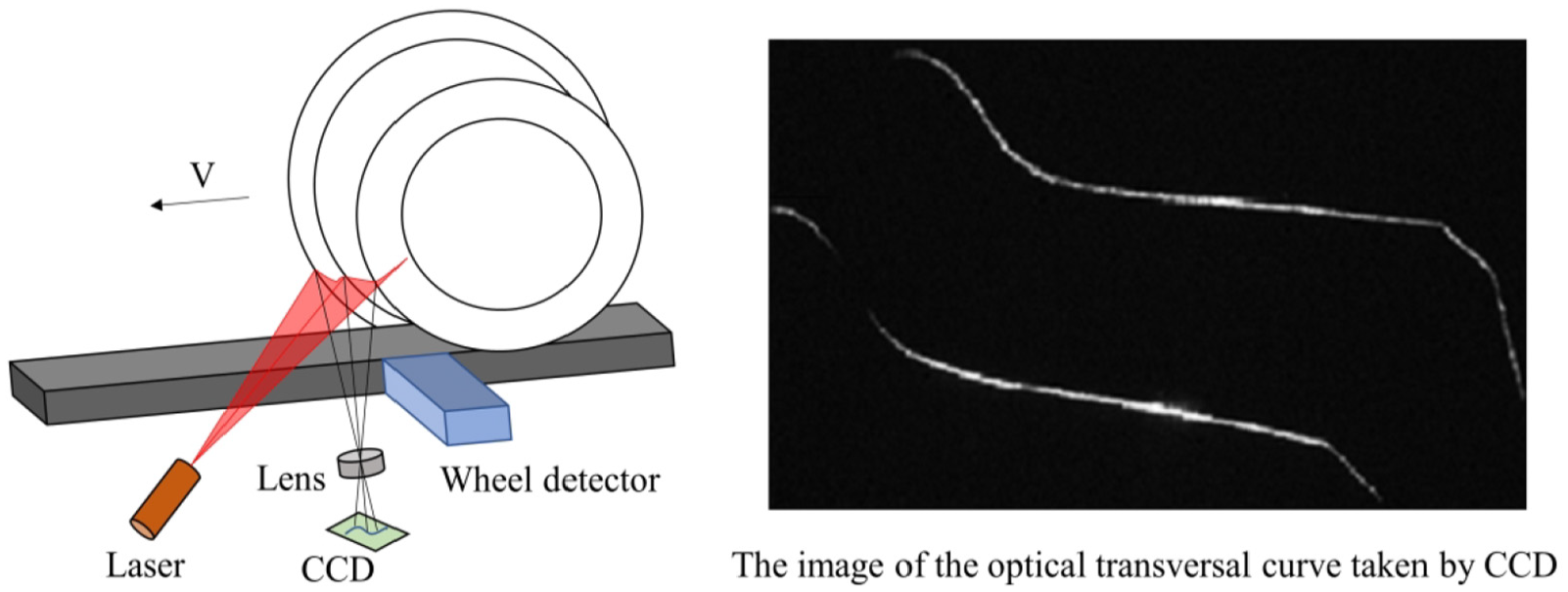
Optical intercept image detection principle.
The research object of this article is the China Railway High-speed (CRH) wheel-set. The tread shape of the CRH380BL model is the wear-type tread of the S1002CN. Figure 5 shows the historical wheel diameter measurement data for the CRH380BL-3539 railway for 1.5 years. The detection data of the wheel pairs are susceptible to the measurement position, maintenance personnel’s measurement habits and manual corrections, loads, rail conditions, and other factors. Historical measurement data will have data fluctuations and obvious abnormal points and repairs. This experiment does not consider the phenomenon of repair.
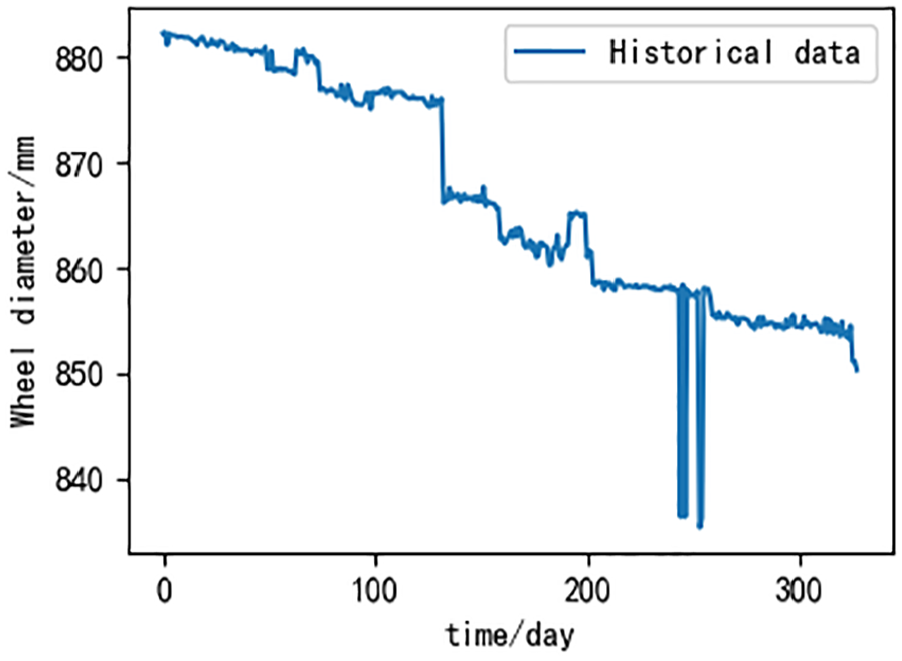
Historical wheel diameter measurement data.
According to the wheel-set data of CRH380BL-3539 railway, the sample data of time series are constructed. The time interval of the time series is 1 day, and 450 data points of wheel diameter data with equal time interval are obtained. Considering that the data center has undergone several repairs and manual correction processing, the outliers in the data are corrected. The final sample data are shown in Figure 6.
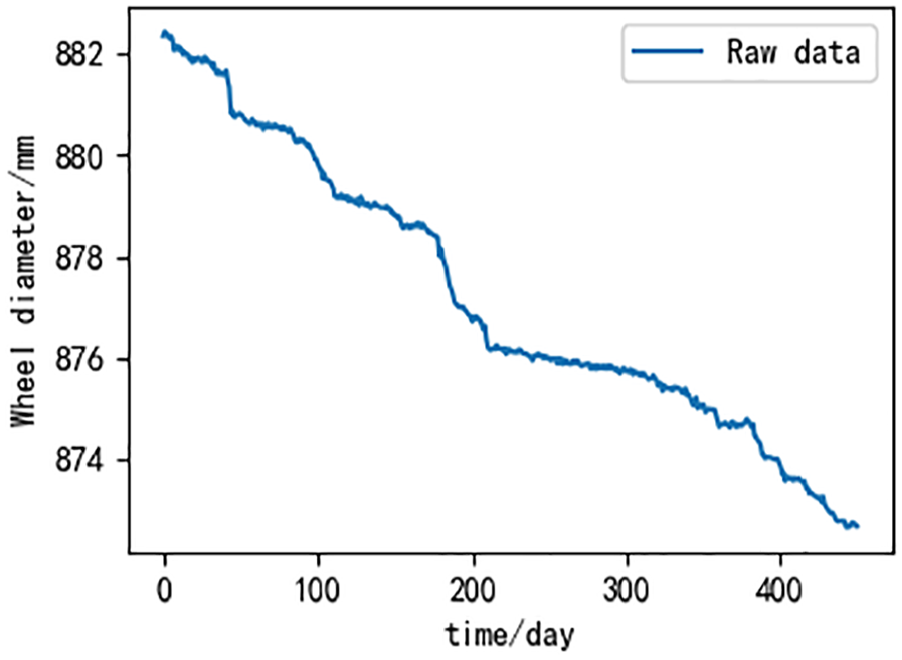
Data sample set.
Set network parameters
Sample feature points have to be constructed.
20
The correlation coefficient has to be selected to observe the input dimension. It can be seen from Figure 7 that the correlation coefficient R is the largest when the input dimension is 10, and the correlation coefficient is gradually decreased when it is lower or higher than the 10-dimensional input layer. Therefore, the input layer is set to 10-dimensional wheel pair diameter history data, and the output layer is the one-dimensional wheel diameter value of the next moment. Wheel diameter values have to be entered at the time of the wheel diameters
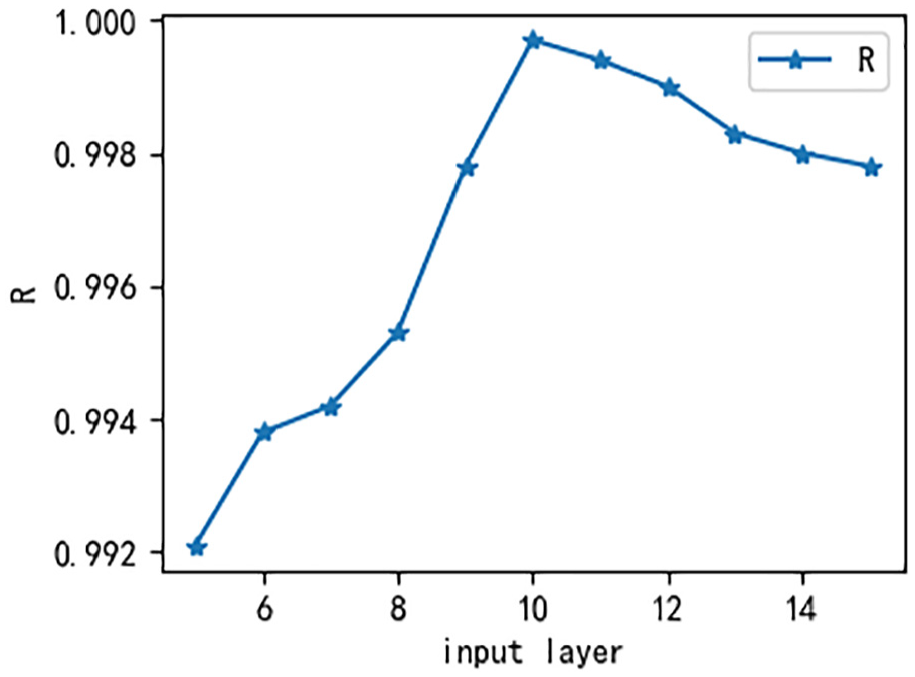
The relationship between the input dimension and the correlation coefficient R.
The neuron transfer function of the hidden layer and the output layer of the neural network adopts a continuous and differentiable sigmoid function. In order to avoid the saturation area of S-type function and improve the convergence speed and sensitivity of the network, the sample data are normalized before network training. In this article, we use min–max standardized data to make the normalized data in the
Results and discussions
In order to better understand the performance of the improved adaptive DE-LMBP neural network model, the LMBP neural network model with the same network structure and the standard DE-LMBP neural network model, and the long short-term memory (LSTM) neural network, were established with the same data samples for comparative analysis. The LSTM neural network is a variant of the recurrent neural network, which is suitable for the analysis of time series data.
Because the problem of the neural network itself will lead to the randomness of the results, the authors have carried out several simulation experiments on four models to obtain the optimal convergence speed and accuracy. The convergence simulation results of LMBP, DE-LMBP, LSTM, and adaptive DE-LMBP four prosperous network models are shown in Figure 8.
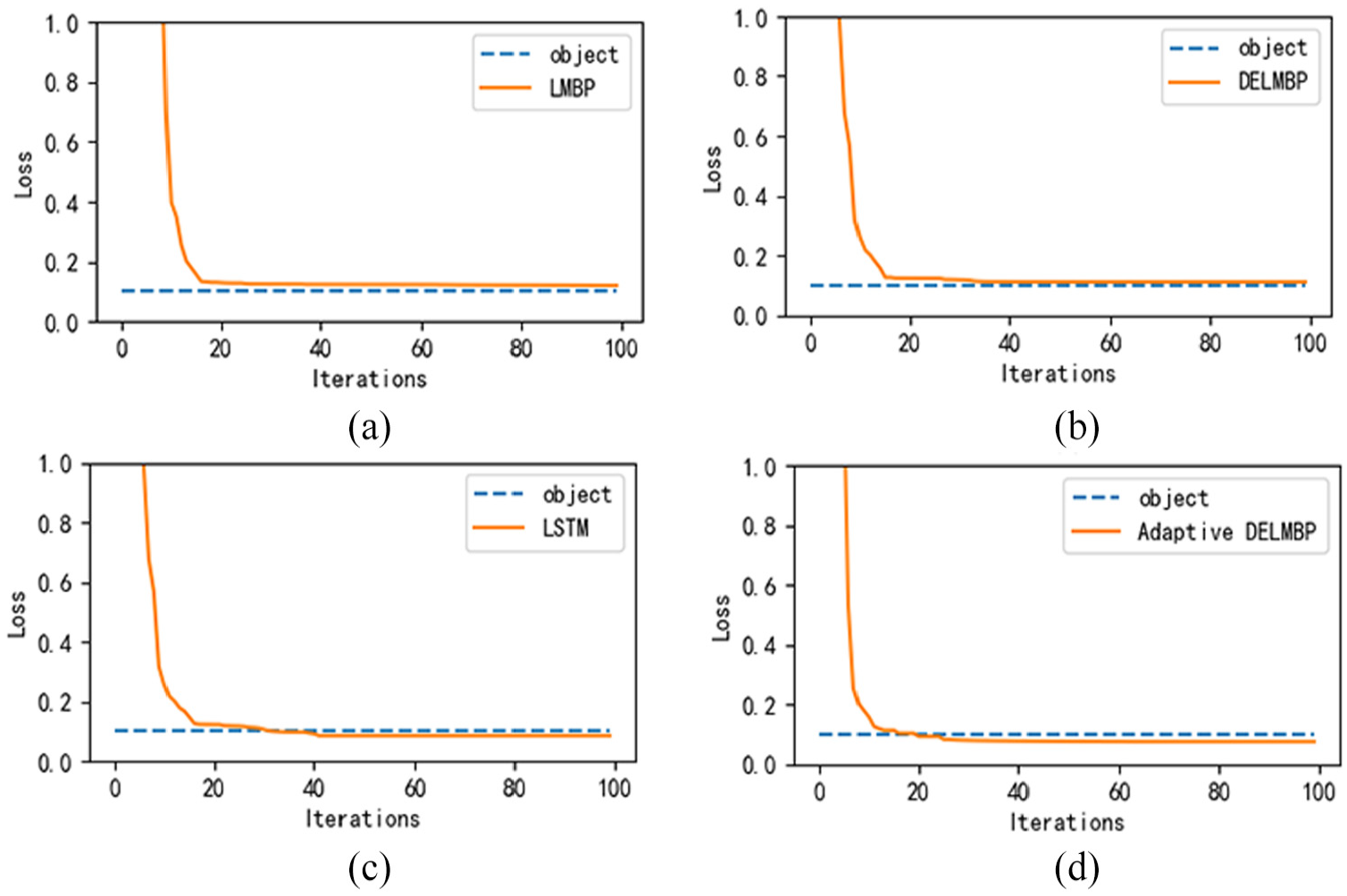
(a) LMBP, (b) DE-LMBP, (c) LSTM, and (d) adaptive DE-LMBP convergence speed comparison.
It can be seen from Figure 8 that the LMBP neural network needs more than 100 times to reach the convergence goal of 0.1. Although the convergence speed of the DE-LMBP neural network is faster than LMBP, it still takes 100 times to reach the convergence target of 0.1, and the LSTM neural network has excellent convergence speed. The adaptive DE-LMBP algorithm can achieve the convergence goal less than 20 times, and the training time is less than other models. This shows that the adaptive DE-LMBP converges much faster than the other three models.
The predicted effects of the three models are shown in Figure 9. Although LSTM converges slightly faster than the other two hybrid models, the prediction results are poor. The expected effects of the other three models are better, but the prediction effect of adaptive DE-LMBP is better than the other three models, and the stability is better.
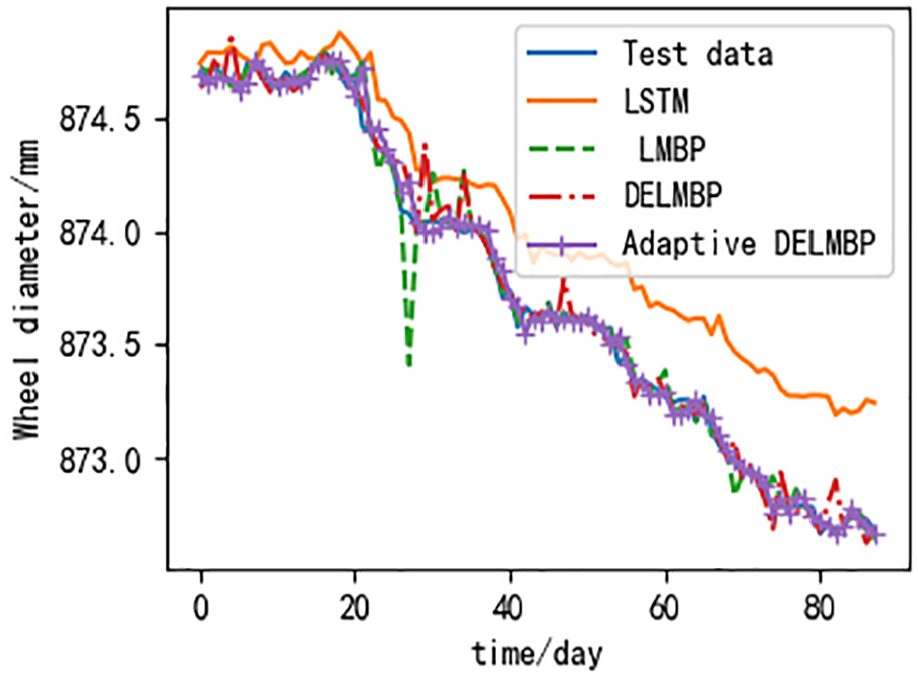
LMBP, DE-LMBP, LSTM, and adaptive DE-LMBP prediction results.
It can be seen from Table 1 although all the four models can predict the wheel diameter better, the index values of the adaptive DE-LMBP neural network model are better than the other three models. This proves that the improved adaptive DE-LMBP neural network model is more suitable for the prediction of the trend of wheel-set size change.
Prediction accuracy of three models.
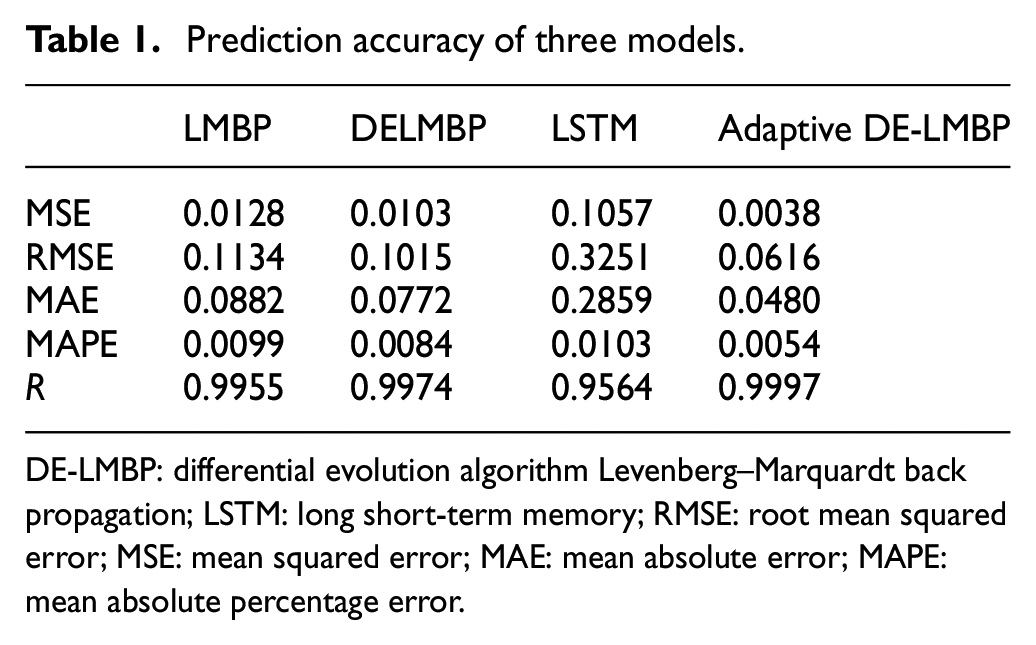
DE-LMBP: differential evolution algorithm Levenberg–Marquardt back propagation; LSTM: long short-term memory; RMSE: root mean squared error; MSE: mean squared error; MAE: mean absolute error; MAPE: mean absolute percentage error.
Conclusion
In this article, the combination of the DE algorithm, LM algorithm, and BP neural network is used for wheel-set size prediction. The main work and contribution are as follows: In order to overcome the shortcomings of traditional BP neural network algorithm, the training process is trapped in local extreme points, and its accuracy is improved. This article first uses the adaptive DE algorithm with powerful global optimization ability to perform global pre-optimization and then uses LM algorithm for deep optimization and training BP neural network. Compared with other three prediction models, the experimental results show that the improved adaptive DE-LMBP algorithm proposed in this article is effective. Compared with the LMBP neural network, the standard DE-LMBP neural network algorithm, and the LSTM neural network, the prediction accuracy is significantly improved.
Therefore, in practical applications, the algorithm can be applied to the prediction of the wheel size of high-speed trains, and the maintenance department is provided with a reference according to the trend of the wheel size prediction, thereby effectively reducing the maintenance cost.
Footnotes
Acknowledgements
The authors thank Southwest Jiaotong University Photoelectric Engineering Institute for their kind support in the experiment.
Handling Editor: Diego A Tibaduiza
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Nature Science Foundation of China (Grant No. 61471304) and we wish to acknowledge them for their support.