
Abstract
The radiofrequency identification (RFID) technology is widely used in modern industry to identify and localize the final manufactured products and their parts. This article analyses and optimizes the localization process of special RFID transponders – markers used to mark the position and type of the underground facility networks (pipes, cables, etc.). The analysis of electric circuits representing the system consisting of the marker and the localization device is performed by numerical solution of the corresponding equations. The results of the numerical solution are then used for calculation of the analytical description of the waveform received as response from the excited marker. The constants obtained from the analytical form of the solution are then used as input parameters for optimization of time window width in the correlation receiver of the marker responses. The optimization is focused on the maximization of the signal-to-noise ratio in the receiving time window. The theoretical calculations are completed by the processing of real signals recorded by an oscilloscope from the localization device where the correlation receiver is planned to apply.
Introduction
The utilization of radiofrequency identification (RFID) transponders is widely applied in today’s industry applications. The transponders are used to identify and/or to localize various kinds of goods and other items. Special RFID transponders are being used to mark the position of the underground facility networks such as telecommunication and energetic cables or water and gas pipes – such transponders are called markers and they are used especially in the case when the underground pipelines are manufactured from the plastic material or when the optical cables are used (without metal conductor). The markers are buried under the ground surface near the marked facility, especially at the important points of the underground facility, that is, crossing with other cables/pipes, connectors, branches, and so on.
The markers are single-bit RFID transponders 1 consisting of tuned LC circuit. The working frequencies of the markers are in the low frequency (LF) band (77–170 kHz), and they depend on the type of the underground facility, for example, 83.0 kHz markers are being used for the gas pipes, 101.4 kHz for the telecommunication cables and so on up to 169.8 kHz for energetic cables. The localization process of the markers with unknown position under the ground surface is based on searching maximum response from the marker by the localization device manually moved in terrain by the operator, so the localization is based on the very popular Received Signal Strength Indication (RSSI) method, which is widely adopted not only in the RFID application but also in the localization using ambient radio transmitters. 2
The antenna of the localization device is inductively coupled with the marker and this fact causes some negative properties of localization process, especially very rapid fall of the marker response amplitude with increasing distance between the marker and the localization device. The response amplitude is inversely proportional on the sixth power of the distance, 3 so the markers must be buried in depth no more than 1.5–2 m. This is a very limiting factor for the signal receiver in the localization device, especially due to the noise, and therefore, this article describes an analysis of the localization process and optimization of the correlation receiver adapted for receiving the responses from the markers.
The theory of the correlation receiver was developed for additive white Gaussian noise (AWGN) channels and for constant modulation rate, that is, for constant duration of the received symbols. 4 Then, the correlation receiver based on the bank of correlators or on the bank of matched filters works on the maximum likelihood principle. But in the case of the marker localization, the received marker response is in fact the symbol with theoretically unlimited duration because the response is essentially a damped sine wave signal with attack and decay time constants, so the duration of the receiving time window must be calculated taking the maximization of signal-to-noise ratio (SNR) into account.
Related works
The localization of the RFID transponders is an actual research topic today. The basic review of RFID transponder localization techniques is given in the study by Sanpechuda and Kovavisaruch. 5 Most of the research studies deal with the localization of the transponders in the ultra high frequency (UHF) band where propagation of the electromagnetic waves is different from propagation of the waves in the LF band. Therefore, the approaches described in the studies by Han et al. 6 , Alsalih et al. 7 and Ting et al. 8 are applicable to the UHF RFID transponder localization, and they are based on the intersection of multiple RFID reader ranges or on radio maps composed of multiple points, so the localization of underground RFID transponders in terrain by these methods would be impractical. The RSSI-based localization of the UHF RFID transponders is described in the study by Zhang et al., 9 in which a relationship between the RSSI value and the transmission power of the reader is analyzed. The segmented antenna system used for localization of small animals is designed in the study by Catarinucci et al. 10 The transponders used for this application work in the UHF band but small localization distances in this case enable that the system uses near field of the segmented antenna.
Similar application to that described in this article is introduced in the study by Daly et al., 11 in which the RFID markers are embedded in concrete and they serve as way points in warehouses. For this purpose, the transponders in the UHF band (868 MHz) were selected as the most suitable, and they were tested with standard and redesigned antennas. The LF band markers were evaluated as unsuitable for this application due to their higher dimensions. Another application of the RFID transponder localization where the transponders are static is described in the study by Ota et al. 12 In this article, the microwave transponders (2.45 GHz) are used and the localization reader is moved by a mobile robot. To evaluate the position of the transponder, an adaptive likelihood model of reader read range is used. In the study by Liu et al., 13 the static transponder is localized by the reader which is moved in two axes above the plane where the transponder is placed. This approach enables to calculate the position accurately by moving the reader around the transponder position.
In the LF band, the coupling between the marker and the antenna of the localization device can be modelled by mutual inductance. Because both the marker and the localization device antenna are coupled resonant LC circuits, the theoretical analysis in the study by Cohen 14 gives good introduction to the mathematical analysis of the marker localization problem. Similar analyses are provided in the studies by Gurleyuk et al. 15 and Abbasi and Khanzade, 16 in which the Tesla transformer is analyzed in frequency and time domains.
The correlation receiver and/or matched filter applications in the RFID technology are described in many sources. Brandl et al. 17 described a special RFID transponder equipped with a chirp signal generator which transmits the chirp signal into the base stations where the matched filters are used to obtain chirp signal autocorrelation function. The position of the RFID transponder is then estimated by the time of arrival (ToA) method. The matched filter is also applied for baseband data demodulation in the UHF RFID reader working with EPCglobal Class-1 Gen-2 RFID transponders. 18 Such robust data demodulator allows compensation of signal distortion and frequency deviation. In the study by Amin et al., 19 the novel digital-matched filter without adders is described and applied to demodulation of signals spread by the Barker code, which is being used in IEEE 802.11 compatible RFID transponders. Another application of the correlation receiver is proposed in the study by Liu et al., 20 in which the digital correlation demodulator for the UHF RFID reader can work with a low SNR. Similar digital receiver architecture for demodulation of low SNR signals from the UHF RFID transponders is proposed in the study by Angerer. 21 Xi and Cho 22 demonstrated lower bit error ratio in comparison to the traditional RFID decoder when the matched filter in the decoder is used. The problems with noise in UHF RFID are studied in the study by Blažević et al., 23 in which the authors measure a distribution of SNR by using a software-defined radio receiver.
The correlation receiver and/or the matched filter is applied not only in the RFID technology but also in many other areas of the communication systems such as the radiolocation and the mobile communications. The reduction in noise by the matched filter is described in the study by Islam and Chong,24,25 but in these papers the main application is focused on the pulse and continuous wave radars. The authors performed comparison of the matched filter and the wavelet transformation properties in noise reduction. Similar problems are solved in the study by Sarkar and Pal, 26 in which the matched filter is applied to reduce the noise in the pulse radar.
In the study by Slock and Trigui, 27 the interference cancelling matched filter is analyzed for application in mobile communication where the interferences are considered as interference generated by multiple channel users mixed with Gaussian noise. The optimal selection of the integration time in the ultra-wideband (UWB) correlation receiver is solved in the study by Chao. 28 The optimization in this case is focused on calculation of minimal bit error probability of the used correlation receiver. In the study by Chao, 28 the similar optimization problem to that in this article is solved, but the difference is in the shape of the received signal – in the study by Chao, 28 the power of the received signal decays exponentially, the received marker response which is analyzed in the next chapter has both exponential attack and decay.
Mathematical model of the localization device – marker system and its solution
This model is based on the models which the authors published previously in the studies by Vestenický et al.29,30 These older models were solved only numerically, and they were used only to obtain the dependence of the marker response amplitude on the distance between the marker and localization device and on the marker resonant frequency. Note that the model in the study by Vestenický et al. 29 is simplified and it does not contain the damping resistance and time interval. The model described here is extended by the analytical solution of the marker response waveform which is in next chapters used for optimization of the marker response receiving window width and for comparison of the Simulink model output.
The process of the marker localization is illustrated in Figure 1. The marker is modelled as a serial resonant circuit with parameters RT (loss resistance), LT (inductance) and CT (capacitance), and the antenna of the localization device is modelled similarly with parameters RR, LR and CR. The localization process is divided into three time intervals as follows:
Marker excitation, 0 ≤ t < T1, when the switch SW1 is in position 0;
Damping of the antenna self-oscillation, T1 ≤ t < T2, when the switch SW1 is in position 1 and the switch SW2 is in position 0, the damping resistor RD is calculated from equation (5); and
Receiving of the marker response, t ≥ T2, when the switch SW1 is in position 1 and the switch SW2 is in position 1. In this time interval, the antenna current is measured by the current sensing resistor RS.
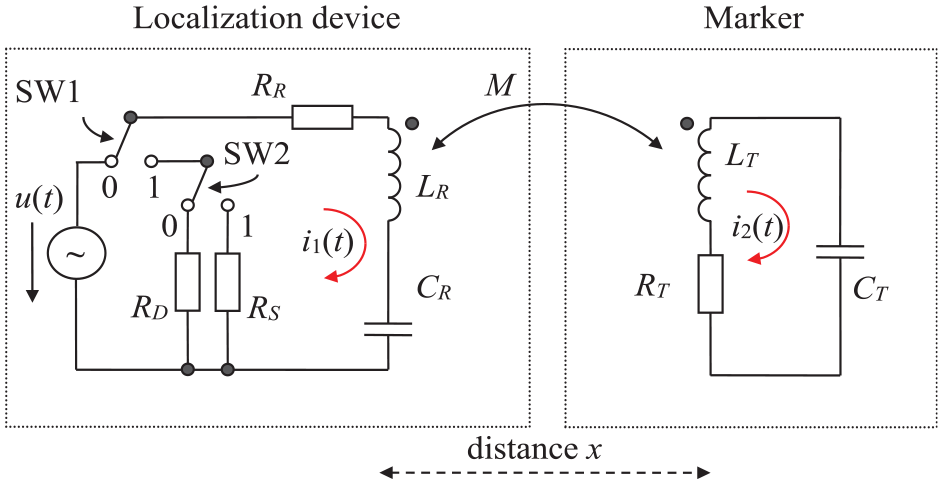
Electrical circuit representing principle of the marker localization process.
The marker is excited by a harmonic generator with amplitude U and frequency f described by equation (1), M is the mutual inductance between the marker and antenna coils given by equation (2), where µ0 is the permeability of vacuum, NR and NT are the number of antenna and marker coil turns, rR and rT are the radiuses of the coils and x is the distance between the antenna and the marker. Note that equation (2) is approximative, and it assumes that the coils have common axis


The currents i1(t) and i2(t) in Figure 1 can be calculated by the loop current method from the system of equation (3). The resistor R is varying and its value is changed in accordance to equation (4) in every of the three time intervals. To obtain solution, the second-order system (3) was transformed into the first-order system by the substitution of x1(t) = i1(t), x2(t) = di1(t)/dt, x3(t) = i2(t) and x4(t) = di2(t)/dt, which is given by equation (6)



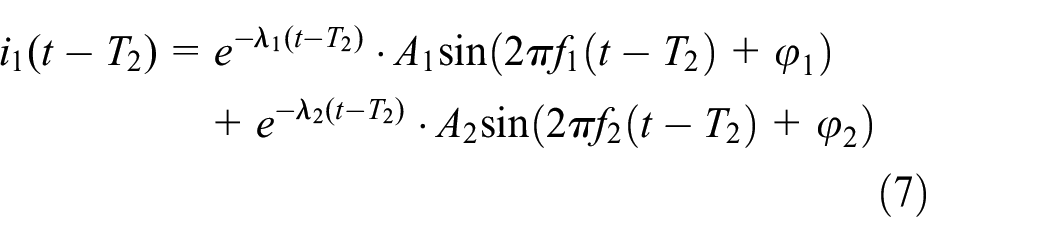
System (6) is nonhomogeneous only in the first time interval (marker excitation), so the solution in the third interval (marker response receiving) where system (6) is homogeneous can be easily obtained in analytical form. The analytical solution is based on the eigenvalues and the eigenvector calculation of the system matrix in equation (6), and the resulting waveform of the current i1(t) in the antenna coil during the third time interval is described by equation (7), that is, the received response of the marker is composed of two damped harmonic waveforms. It is in conformance with the conclusions in the study by Cohen. 14 The parameters in equation (7) were calculated from the general solution of system (6). The initial conditions, which are necessary to obtain the final solution of system (6), were taken from the numerical solution in time interval <0, T2) because the analytical solution of system (6) in whole time interval <0, ∞) is complicated due to inhomogeneity of system (6) in the initial time interval <0, T1).
The damping factors λ1 and λ2, frequencies f1 and f2 and phase shifts φ1 and φ2 in equation (7) were calculated for input parameters given in Table 1

Parameters of the mathematical model.

The dependencies of the parameters λ1 and λ2, f1 and f2, A1 and A2 and φ1 and φ2 on the distance x between the antenna and the marker are illustrated in the series of the next figures. The parameters of the marker response waveform can be considered as constant for the distances greater than approximately 0.7 m except the amplitudes A1, A2, which fall rapidly with the increase in distance. Then, we can consider that the amplitudes A1=A2, frequencies f1=f2 and phase shifts φ1 = 0°, φ2 =−180°, so that equation (7) can be simplified into the following form

The simplified equation (8) represents the case which occurs under normal operating conditions during the marker localization process because the markers are usually buried in depth approximately 1 m. The damping factors λ1 and λ2 in this case converge to the damping factors of separated resonant circuits of the marker and the antenna, see equation (9), where QT is the quality factor of marker resonant circuit and ω = 2πf (Figures 2 and 3). Similar calculation is valid for λ2


Dependence of the damping factors (a) and the frequencies of the received marker response on distance (b).
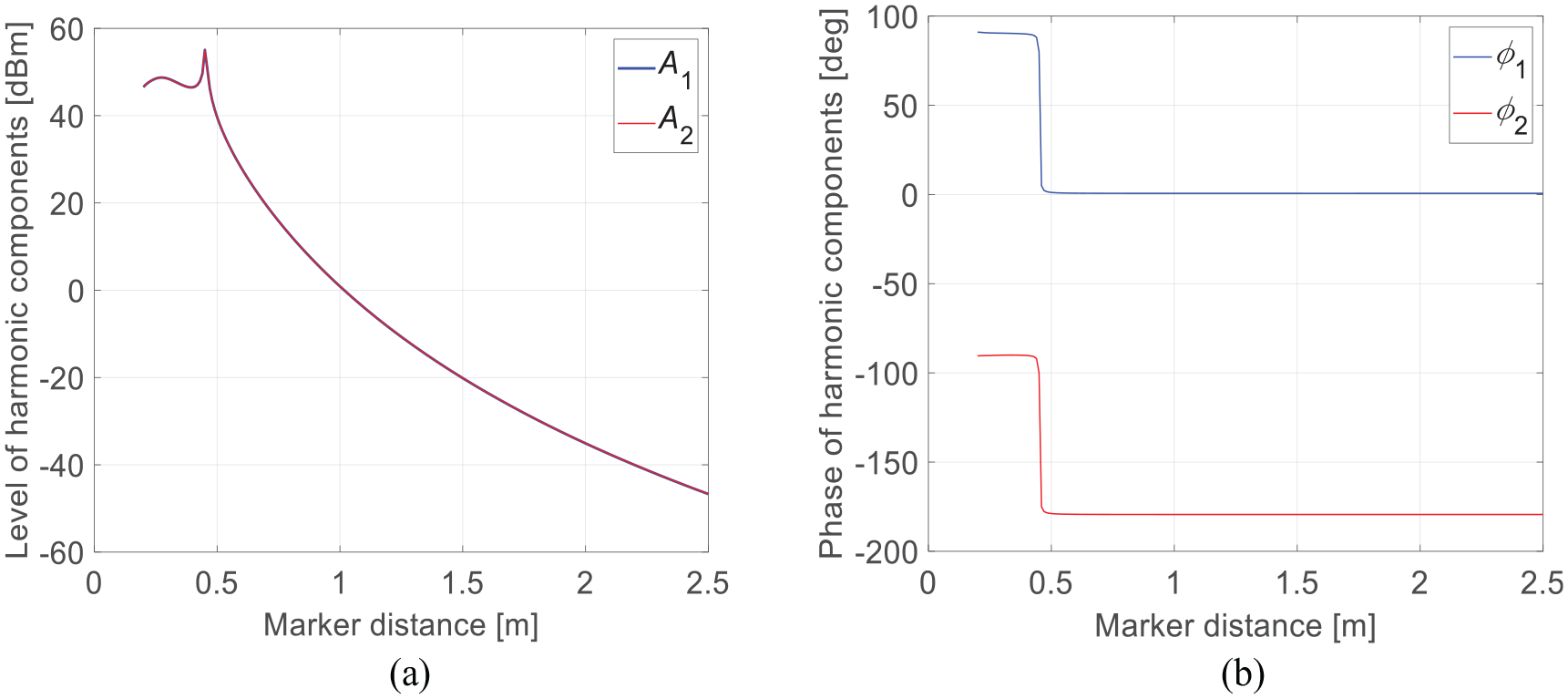
Dependence of the amplitudes (a) and the initial phase shifts of on distance (b).
Simulink model of the localizationdevice – marker system and its evaluation
The model of the system presented in Figure 4 was build up in Simulink environment to enable the simulation of the noisy marker responses and compare the ‘pure’ marker responses to the solution given by equation (7). The proposed model is based on the electrical circuit presented in Figure 1 and supplemented by auxiliary blocks that enable the correct circuit excitation, the time interval switching and export of resulting waveforms to the MATLAB workspace. The white noise source ‘White Noise’ block along with the bandpass filtering block ‘Bandpass filter’ were added to the model to produce noisy marker responses. The coils of the resonant circuits are modelled by the ‘Lr_Lt’ block, with three parameters – inductances of the coils (LR, LT) and the coupling factor k given by equation (10)


Simulink model.
The antenna–marker system excitation is accomplished by product of harmonic carrier with frequency f = 101.4 kHz and amplitude U = 12 V generated by the ‘Carrier’ block and binary modulation signal generated by the ‘Modulation’ block. This signal controls the ideal voltage source ‘Modulated carrier voltage source,’ which drives the antenna serial resonant circuit. The modulation signal has the amplitude of 1 in the time interval < 0, T1) and 0, otherwise. The damping resistor of the antenna circuit and its serial resistance are modelled through voltage controlled resistor ‘RD’ block, which is controlled by another binary signal generated by the ‘Damping’ block. The damping signal has the value of RD given by equation (5) in the time interval < T1, T2) and 0, otherwise. Correct RR value in the time intervals <0, T1), < T2, ∞) is given by the minimum resistance parameter in the ‘RD’ block with assumption that RS = 0 Ω. There are three parameters of the white noise source block: mean value NM = 0, variance NV and random generator seed S which is set to a random number for each run of the simulation. The properties of the filtered noise are determined by the frequency response of used band pass filter in terms of frequency dependence of power spectral density (PSD) and variance parameter NV in terms of its average power. The parameters of the bandpass filter block were determined in such a manner that the PSD characteristic of generated noise and the PSD characteristic of noise sampled in real localization device are approximately matched (Figure 5). Note that the interferences from the local (unknown) source and from the telemetric transmitter located in Lakihegy, Hungary (135.6 kHz) were omitted. The variance parameter was determined in the manner so that the average powers of both noises are equal. The currents in the circuit loops are measured through the ideal ampere metre ‘I_ANT’ and ‘I_MKR’ blocks. The physical components LR, CR, RR, RD, LT, CT and RT are modelled by Simscape blocks and therefore they need to use conversion blocks between the Simulink and Simscape signals, ‘S-PS#x’ and ‘PS-S#x’, respectively. The resulting waveforms are exported to the MATLAB workspace by the ‘To Workspace x’ blocks. The antenna current i1(t) is exported through the ‘To Workspace 3’ block, the marker current i2(t) is exported through the ‘To Workspace 1’ block and the filtered noise signal and noisy antenna current are exported through ‘To Workspace 2’ and ‘To Workspace’ blocks, respectively.

PSD of real and simulated noise.
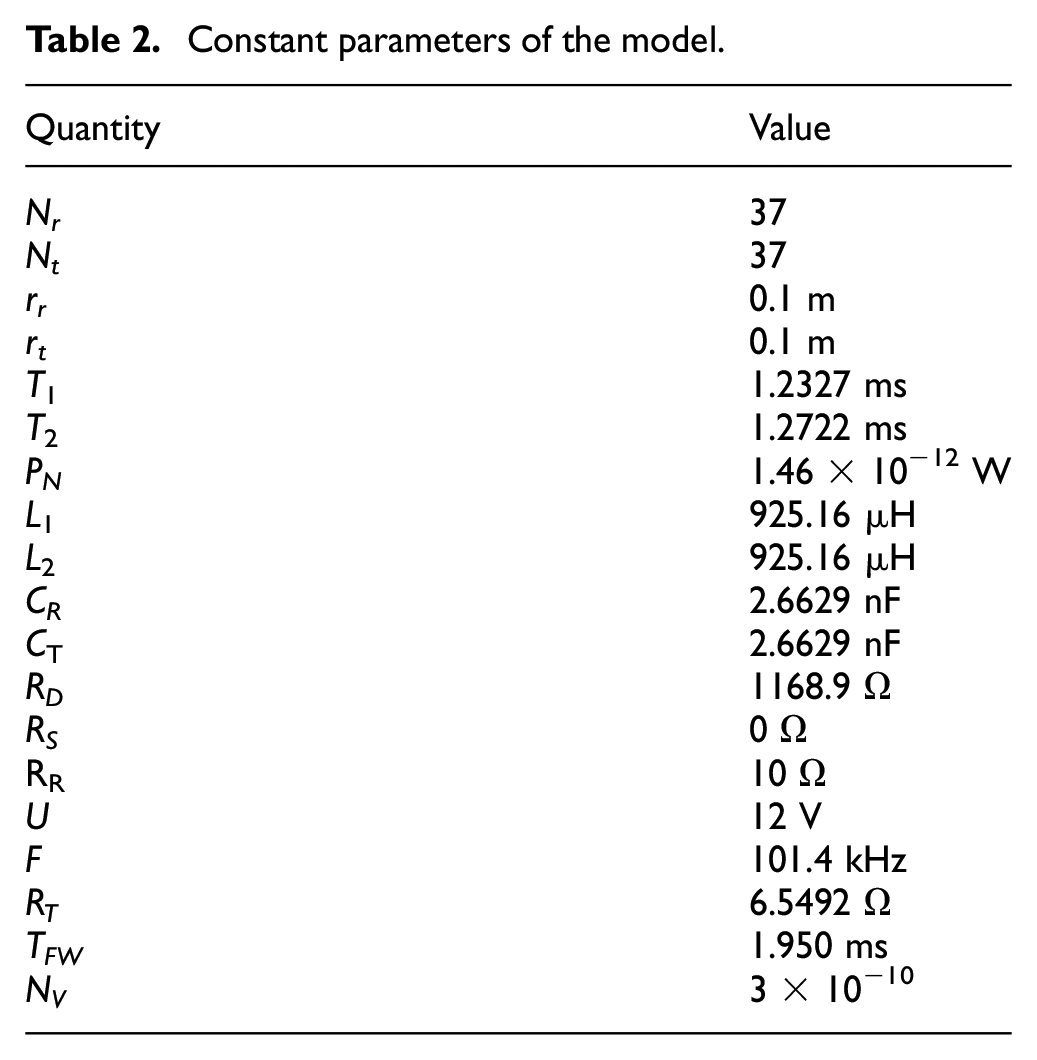
The resulting waveform of i1(t) obtained from the Simulink model was evaluated against the waveform obtained from equation (7). Both models were fed with equal parameters according to Table 2. The resulting waveforms for selected marker distances (1.2 and 1.65 m) are presented in Figure 6(a), (c) and (b), (d) respectively. The difference between results from both models was evaluated as difference in envelopes of i1(t) waveforms obtained from both models, and it is presented in percentage scale in Figure 7. It can be seen that the difference slightly increases in time. Peak values of the difference are present mainly for very small amplitudes of i1(t) at the beginning and at the end of receive window. In the main portion of the receive window, the difference value is kept well below 0.5%. As we want to use i1(t) to evaluate the correlations of noisy signals, this small difference can be neglected and both models can be assumed as equal.
Constant parameters of the model.

Antenna current i1(t) for distance x = 1.2 m (a and c) and x = 1.65 m (b and d) obtained by analytical solution and simulation.

Percentage difference of i1(t) envelope for distance: (a) x = 1.2 m and (b) x = 1.65 m.
Theoretical relationship between the SNR and the correlation
Assuming the digital processing of the marker response waveform, the correlation receiver must have in its memory a set of calculated samples i1(j) of the marker response i1(t) as a reference signal. The noisy received signal will consist of the components mi1(j), where m is a scale factor representing the decrease in the response with increased distance x and the noise component n(j). Then, the correlation coefficient Cor between the noisy and the reference signals can be calculated from the well-known Pearson formula

Assuming that the noise and the signal are statistically independent and that the mean values of the signal


Optimization of receive window width
In accordance to equation (12), when we need to maximize the correlation between markers noisy response signal and the reference response signal we need to maximize the SNR. SNR can be expressed by equation (13) in the case that we have the discrete signals or by equation (14), if we have the signals defined analytically. Both equations are based on the energy of signal (ES) and the energy of noise (EN) ratio. In the case that we have analytically expressed the signal i1(t), its energy ES can be evaluated by equation (15) where τ is the upper integration boundary. It is obvious that the marker response signal can be seen in time interval <T2, ∞) and therefore τ∈<T2, ∞); moreover, it can be said that τ–T2 is the receive window width parameter TW according to equation (16). The energy of the noise EN can be expressed by equation (17) in the case that the noise has constant average power




Combining equations (7) and (15) new equation (18), which stands for energy of marker response over receive window width TW, can be obtained.
The integral given by equation (18) can be easily evaluated for different parameters of the localization device–marker system and for various widths of the receive window TW. Equation (18) was evaluated for the parameters summarized in Table 2 for selected marker distances and for receive window width TW∈<0, 1.95> ms, and it is presented in Figure 8. It can be seen that the energy of signal is monotonically rising and asymptotically limited by upper bound and does not significantly rise with increase in the window width TW beyond certain point. It is also clear that the energy of noise EN given by equation (17) will increase linearly with increase in the window width TW. The SNR dependency on window width TW was evaluated for selected marker distances, and it is graphically presented in Figure 9. The SNR for each distance has a global maximum for certain value of TWOPT.
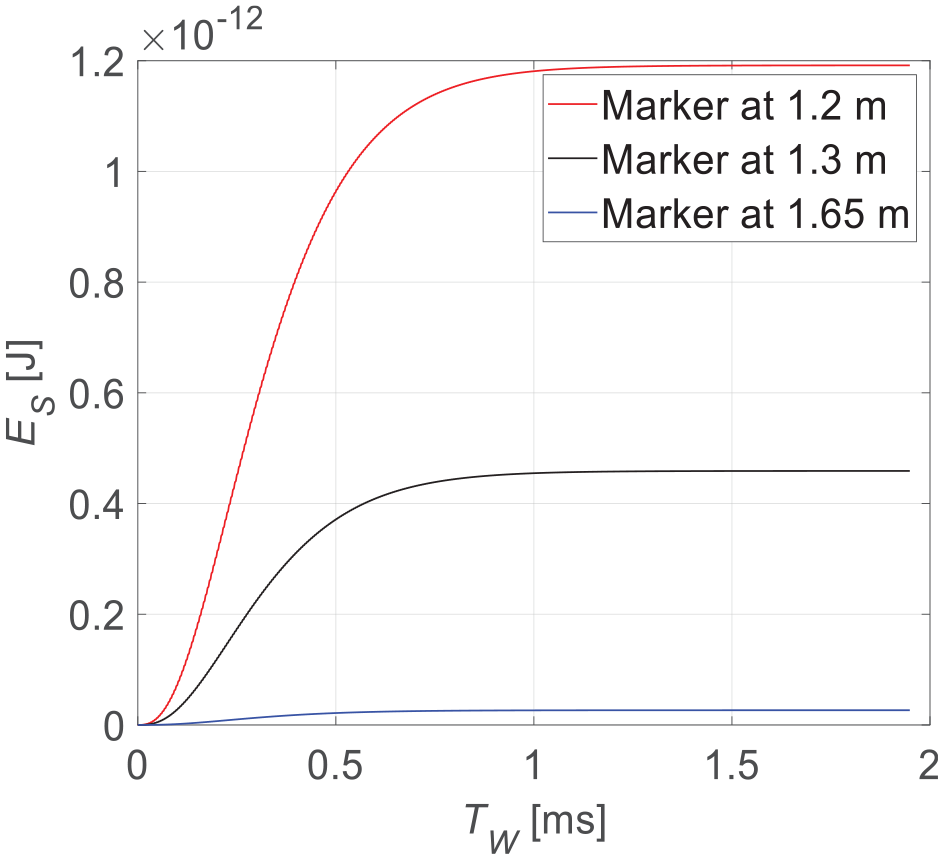
Energy of signal versus window width TW.

SNR versus window width TW.
The evaluation of the SNR was performed for the marker distances from 0.2 up to 2.5 m for window width from 0 ms up to TFW = 1.95 ms with a given time step of 1 µs. The corresponding TWOPT value was found for each selected distance of marker by the MATLAB max function. The result of this process is presented in Figure 10. It can be seen that beyond certain distance the optimal window width remains practically constant. This phenomenon can be explained so that the damping factors λ1 and λ2 remain almost constant at the higher distances. The lower TWOPT values for lower marker distances can be explained by the existence of the beats in i1(t) waveform. The existence of the beats is evident because the frequencies of harmonic components in i1(t) are not equal – refer to Figure 2(b). The SNR dependencies on marker distance for window width of TWF and TWOPT expressed in decibels are presented in Figure 11. The SNR values for optimized receive window width are 3–5 dB higher than the one for full window width. It can be supposed that this difference will increase the value of correlation between the noisy response signal and the reference response signal.

Dependence of optimal window width on distance.

Dependence of SNR on distance.
Conclusion
The optimization of the correlation receiver window width in marker localization is forced by a difference between the application of the correlation receiver in classical data transfer and the marker localization. The data transfer technologies usually use set of symbols representing the individual bits or groups of bits which have a constant duration given by inverse value of (constant) modulation rate. In the case of the marker localization, the response can be considered as a single symbol with theoretically infinite duration and considerably variable maximum amplitude dependent on marker distance. Therefore, the optimization of the receive window width is necessary to maximize the SNR.
To evaluate the optimization effect, the correlation between the noisy marker responses ‘I_ant’ and the reference response i1(t) obtained from the Simulink model was evaluated according to equation (11) for both TWF and TWOPT window widths. The reference response was obtained from the Simulink model as a i1(t) waveform evaluated at the marker distance of 0.6 m. The theoretical estimations of correlation based on SNR values according to equation (12) were also evaluated. The results are presented in Figure 12(a).

Dependence of the correlations on the marker distance: (a) theoretical estimation versus simulation and (b) theoretical estimation versus real measurement.
Both the correlation curves obtained by the simulation and estimated from equation (12) for TWOPT window width (orange and red curves) are significantly higher than those obtained for TFW window width (magenta and blue curves). The correlation value is increased approximately by 0.2 for the marker distance 2.0 m after optimization. It can also be seen that the correlation values for both cases obtained from equation (12) are optimistic estimations. The increase in the correlation values for TWOPT window width can be utilized in various ways. It can be used for the increase in the correlation threshold value to lower the probability of false marker detection preserving the detection distance or it can be used to extend the detection range preserving the correlation threshold value or the combination of both.
The results of the theoretical and simulation models were compared by the real experiment. In the experiment, the real signals from the marker localization device (an older model of the locator with an analogue signal processing by a phase-locked loop) were sampled by a digital storage oscilloscope with 1 Ms/s sample rate. This sample rate gives approximately 10 samples per period of the marker response signal (101.4 kHz) and such relatively slow sample rate was selected to try out the correlation receiver functionality when only small amount of RAM and CPU power will be usable in a planned battery-operated localization device. The marker responses were measured for marker distances from 0.3 up to 2.5 m with 0.1 m step and always 19 recorded consecutive time windows with the marker responses (such as in Figure 6) were used to calculate the correlation between the sampled signal and simulated response obtained from the Simulink model. The results together with the theoretical curves (for comparison) are presented in Figure 12(b) for a full receive window width and for optimized window width. The measured correlations (green and magenta curves) are slightly lower than theoretical values (red and blue curves) because in the received signal not only the noise but also the deterministic interferences are present (see the spectrum of the real signal, red curve in Figure 5). However, the benefit of the receive window width optimization is evident. For example, the measured correlation was increased by 0.2 from 0.45 up to 0.65 after optimization for marker distance 2.0 m. This corresponds to the increase in SNR by approximately 4.5 dB in accordance to equation (12).
Footnotes
Handling Editor: James Brusey
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work has been supported by the grant of Cultural and Educational Grant Agency of the Slovak Republic (KEGA) No. 038ŽU-4/2017: ‘Laboratory education methods of automatic identification and localization using radiofrequency identification technology’.