
Abstract
With the development of technology, an unmanned aircraft system will play a significant role in Internet of things based on 5G. Avionics system is an important part of the unmanned aircraft system, and the reliability of the avionics system directly determines the ability to perform missions. This article deals with the problem of reliability modeling with unmanned aircraft system avionics systems built on Internet of things in the 5G scenario. First, based on the composition of the avionics system, the network structure of the unmanned aircraft system avionics system is presented. Then, to evaluate the reliability, a task model of the unmanned aircraft system avionics system is proposed. Finally, an illustration of unmanned aircraft system reliability performing reconnaissance is also presented. By analyzing the task performance, it is shown that redundancy design of the units can improve the reliability of the unmanned aircraft system avionics system.
Keywords
Introduction
Wireless communication has experienced rapid development in nearly two decades. The characteristics of 5G, such as enhanced mobile broadband, ultra-reliability, and low latency communication, will provide important technical support for Internet of things (IoT). 5G-based IoT will significantly enhance the quality and operational efficiency of various industries. Meanwhile, with the development of aviation industry, the unmanned aircraft system (UAS) has been widely used in both military and civilian fields due to its advantages, including high flexibility, low cost, and small size. It is foreseeable that UAS will become an important part of IoT in future. Avionics system is the central nervous system of UAS, and the reliability of the avionics system directly determines the viability and ability to perform missions of UAS. Therefore, it is very important to make research on the reliability of the UAS avionics system.
The research on the reliability of the UAS avionics system involves many aspects, including interconnected system modeling study and function analysis of communication transmission. There are many transmission systems such as Cloud Txn and WiMAX, which will provide important technical supports for the development of 5G-based IoT technology in next generation.1,2 Many research also work on the reliability analyzation of interconnected systems, which mainly focus on the connectivity 3 and the reliability of tasks.4–6 Lin et al. 3 raised a kind of reliability model describing the connectivity of common network including both node and link units. Tripath 4 proposed another task-based reliability modeling by taking processor units into account. Xu et al. 5 adopted a task-based reliability modeling to study the reliability of fabric topologies of fibre channel (FC), and Zhou and Xiong 6 proposed a task-based reliability modeling for the avionics full duplex switched ethernet (AFDX), analyzing the reliability of the A380 avionics system from the perspective of basic topology and task significance. UAS can support many functions in 5G-based IoT scenario. Full-duplex relay and sparse code multiple access (SCMA) are two significant techniques worthy utilizing into the UAS avionics system to keep high capacity and low delay.7,8 S Sun et al. 9 proposed a holistic solution using software defined radio (SDR) and software defined network (SDN) to integrate network function to adapt 5G networks. S Han et al. 10 focused on dense-device networks and researched the method using big data to make deep cooperation for users. Although some researchers have raised constructive results about avionics system and function analyzation mainly in manned aircraft, there are little literature on the research of UAS avionics system performance. Considering the need of UAS avionics system performance analysis in IoT, this article studies the reliability of the UAS avionics system based on the aforementioned research.
The rest of this article is organized as follows: section “UAS IoT architecture and avionics system” discusses IoT architecture centered on UAS as well as the components and functions of the UAS avionics system. Section “Network structure of the UAS avionics system” proposes the network structure of the UAS avionics system built on 5G. Section “Task model of the UAS avionics system” presents the task model. Based on the aforementioned model, section “Reliability model of the UAS avionics system” presents the reliability model of the UAS avionics system. In section “The reliability analysis of performing reconnaissance for UAS,” the article gives an example of UAS performing reconnaissance and analyzes the reliability of the UAS avionics system from the perspective of task reliability and proposes a method of redundancy design to improve the reliability of the UAS avionics system. Finally, section “Conclusion” concludes this article.
UAS IoT architecture and avionics system
UAS IoT architecture
Drones can play important roles in IoT. Figure 1 shows the IoT architecture of UAS based on 5G. 11 With connection to 5G link, UAS can provide many functions such as real-time high-definition image transmission, low-delay control, and always-on-line ability. These functions will support a variety of personal and industrial services such as aerial photography, delivery, and exploration, which will form an integrated “Net-Sky.”

The architecture of the UAS IoT system based on 5G.
In future operation scenarios, UAS also faces many challenges in integrating UAS air traffic management systems with urban aerospace management systems. An important part of the integration is to consider the safety and reliability of UAS in operation, so as to provide a reference for technical indicators to make common specifications.
UAS avionics system
The performance of a drone highly depends on its avionics system. UAS avionics system is mainly composed of ground station, launch and recovery system, aircraft, mission load, and data link.12–14 In Figure 2, we present the components of the UAS avionics system, and Table 1 clarifies the abbreviations and functions of each component in detail. Some UASs directly control the launch and recovery through the ground station, thus in this article, we assume that there is no launch and recovery system in the UAS avionics system for simplicity. The data link is a bidirectional link between the ground segment and aerial segment of UAS, and this article considers the UAS avionics system under 5G link.
The components of the UAS avionics system.
Introduction of the UAS avionics system.
UAS: unmanned aircraft system.
Network structure of the UAS avionics system
The design of the UAS avionics system draws lessons from the manned aircraft avionics system. It has some characteristics of manned aircraft, while with its own features, 12 such as multi-platform and mixed communication mode.
Specifically, a manned aircraft avionics system is a single platform system, which consists of a variety of equipment on an airplane. The equipment constitutes different kinds of network structure through a variety of protocols in the aerospace field, which communicate with each other through wired link.
However, the UAS avionics system, which is a multi-platform system, is composed of ground station, launch and recovery system, aircraft, mission load, and data link. The launch and recovery system is the ground segment of the UAS avionics system. Aircraft and mission load are the aerial segment. The communication mode of the UAS avionics system is a combination of wired communication and wireless communication. The mode between ground segment and aerial segment is wireless, while the mode between two aerial segments is wired communication.
The common wire protocol in UAS is the controller area network (CAN) bus protocol, which has the characteristics of high reliability and low delay. The addition of units to the bus does not require any changes in other hardware and software. As a new point-to-point transmission mode, 5G is characterized by high reliability, low delay, and high speed. Taking account of the inheritance, price, performance, and other factors, we present the network architecture of the UAS avionics system shown in Figure 3, referring to previous studies.15,16

The network structure of the UAS avionics system.
In Figure 3, the devices are called as nodes in the system, including flight control computer (FCC), camera (CA), memory (ME), and GPS. These nodes in the ground station are connected by aviation bus. In the aerial segment, some nodes are connected to the 5G router and other nodes are connected to the CAN bus.
Task model of the UAS avionics system
As a regulator of the space electronic platform system, which is always called interface control document (ICD), the UAS avionics system can be seen as a set of tasks. The function of UAS is equal to a collection of several tasks, for instance, Table 214–17 lists the tasks that need to be completed when UAS performs reconnaissance. The tasks can be abstracted to information interaction in the UAS avionics system. The information interaction depends on the interconnection network of the UAS avionics system. The information interaction depends not only on the resources of local nodes but also the communication with other nodes. There are often two or more nodes involved in the interaction. This article only considers the information interaction between two nodes.
Tasks of UAS performing reconnaissance.

UAS: unmanned aircraft system; CM: controller and monitor; SA: servo actuator; EG: engine; AP: airborne power; GPS: global positioning system; IMU: inertial measurement unit; AH: airspeed head; MC: mission controller; CA: camera; SG: signal processor; FCC: flight control computer; ME: memory; RA: radar.
Task model
The task is defined as a unidirectional transmission of information between any two nodes in the UAS avionics system. The task can be described as
Path set of tasks
The UAS avionics system can be described as a collection including node units, router units, wired link units, and wireless link units. An ordered array of these components during the task

where the ith path




The node set, the router set, the wired link set, and the wireless link set of




As the number of communication nodes adds, the complexity of numerating all the path sets increases much fast, which belongs to the non-deterministic polynomial (NP)-hard problem. Considering the node number of general tasks that the UAS avionics system performs is not big, it is algorithmically solvable to list all paths of a task and conduct reliability analyzation. (NP-hard problem is an algorithmic problem that the time to solve the problem would be significantly increasing as the problem grows in size. Reliability calculation based on enumerating all paths of a task belongs to the NP-hard problem, because when the units of a task grow small, the paths increase fast, which significantly influences time complexity. However, in the actual UAS avionics system, the unit number to support a task cannot be too big limited by the size of drones and the performance of functions. Thus, we can use the method listing all the paths to calculate the reliability in the UAS avionics system.)
Reliability model of the UAS avionics system
Assumption
Given that the UAS avionics system nodes have a number size of M. First, we take the assumption that the occurrence of component failures is independent, components either work or fail. Second, we assume that the variable m is the number of tasks; therefore, the expression of the system task set is
Task reliability
In the UAS avionics system, the task

where
Task reliability is equivalent to the probability that there exists at least one path among task paths, which is

According to the formula of probability for compatible event, task reliability can be further denoted as

The reliability analysis of performing reconnaissance for UAS
The reliability of the system plays an important role in the design of the UAS avionics system. Performing various missions is the main function of UAS. When a UAS performs the mission, some nodes in the avionics system communicate with each other. The function of the UAS avionics system is equal to the collection of several tasks; therefore, the reliability of the UAS avionics system can be measured by the task reliability. In the following, the UAS performing reconnaissance is taken as an example for analyzing the reliability of the UAS avionics system based on the network structure of the UAS avionics system in Figure 3.
Task description
When UAS performs reconnaissance, all the equipment of the UAS avionics system work together to exchange information so that UAS can successfully complete the reconnaissance, for instance, in order to know the position of the drone, it is necessary to send the information of GPS to the controller and monitor. From Table 2, there are two ways to divide the tasks, including Class of Path and Class of Task Function.
First, we can see that these tasks are divided into two categories according to the path of the task. One is the task between the node of ground station and the node of aerial segment, which can be denoted as Class A in Class of Path, for example
Second, according to the function of the task, these tasks can also be divided into two categories, one is the task related to the normal flight operations of UAS, which can be denoted as Class I in Class of Task Function, for example
Reliability analysis
Based on the network structure of the 5G UAS avionics system shown in Figure 3, we analyze the task reliability in conjunction with the task description in Table 2. To facilitate the discussion, we make the following assumptions:
The node is characterized as
All nodes have the same component failure rate, denoted as
All routers have the same component failure rate, denoted as
All wired links have the same component failure rate, denoted as
All wireless links have the same component failure rate, denoted as
In order to accurately reflect the influence of component failure rate on task reliability, the failure rate is set in range from 0.0001 to 0.1.
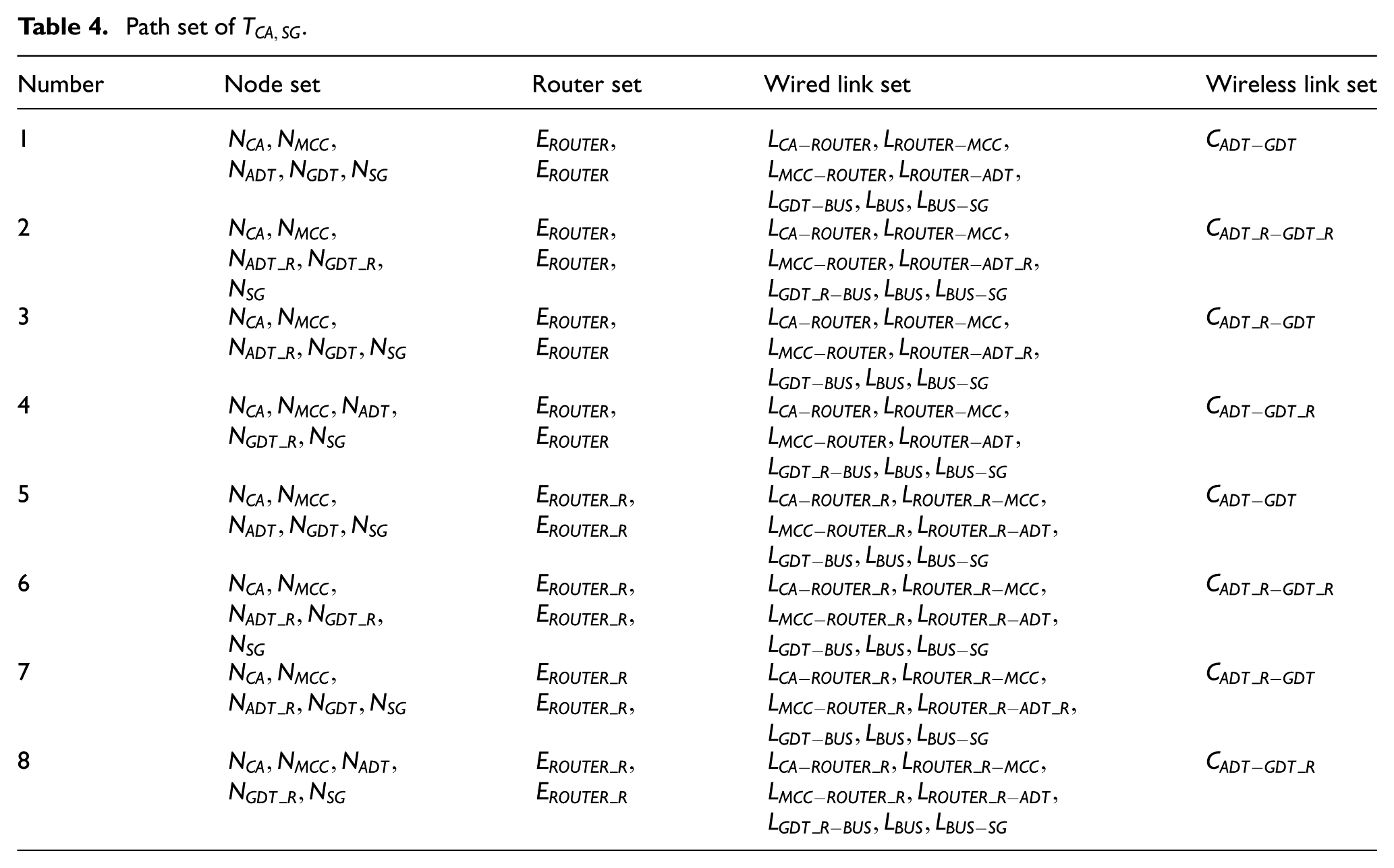
According to the method of reliability modeling in this article, we can obtain the node set, the router set, the wired link set, and the wireless link set of each task in Table 2. We take



Path sets of four tasks of UAS performing reconnaissance.

UAS: unmanned aircraft system.
Figure 4 describes the correlation between the reliability of four tasks and the failure rate of the node unit, when the failure rate of the router unit is 0.0001, the failure rate of the wired link unit is 0.001, and the failure rate of the wireless link unit is 0.01. Figure 5 describes the correlation between the reliability of four tasks and the failure rate of the router unit, when the failure rate of the node unit is 0.001, the failure rate of the wired link unit is 0.001, and the failure rate of the wireless link unit is 0.01. Figure 6 describes the correlation between the reliability of four tasks and the failure rate of the wired link unit, when the failure rate of the node unit is 0.001, the failure rate of the router unit is 0.0001, and the failure rate of the wireless link unit is 0.01. Figure 7 describes the correlation between the reliability of four tasks and the failure rate of the wireless link unit, when the failure rate of the node unit is 0.001, the failure rate of the router unit is 0.0001, and the failure rate of the wired link unit is 0.001.

The relationship between the task reliability and the failure rate of the node.
The relationship between the task reliability and the failure rate of the router.

The relationship between the task reliability and the failure rate of the wired link.

The relationship between the task reliability and the failure rate of the wireless link.
Several rules can be obtained directly from Figures 4–7, which are as follows:
Rule 1. From Figure 4, with the increase in the failure rate of the node unit, we can see that the reliability of each task decreases. When the failure rate of the node unit is less than 0.001, the reliability of four tasks decreases slowly. When the failure rate of the node unit is between 0.001 and 0.01, the reliability of four tasks decreases rapidly. When the failure rate of the node unit is more than 0.01, the reliability of four tasks deteriorated rapidly.
Rule 2. From Figure 5, with the increase in the failure rate of the router unit, we can see that the reliability of each task decreases. When the failure rate of the router unit is less than 0.001, the reliability of four tasks decreases slowly. When the failure rate of the node unit is between 0.001 and 0.01, the reliability of four tasks decreases rapidly. When the failure rate of the node unit is more than 0.01, the reliability of four tasks deteriorated rapidly.
Rule 3. From Figure 6, with the increase in the failure rate of the wired link unit, we can see that the reliability of each task decreases. When the failure rate of the wired link unit is less than 0.001, the reliability of four tasks decreases slowly. When the failure rate of the wired link unit is between 0.001 and 0.01, the reliability of four tasks decreases rapidly. When the failure rate of the wired link unit is more than 0.01, the reliability of four tasks deteriorated rapidly.
Rule 4. From Figure 7, the reliability of
Rule 5. From Figures 4–7, we can see that the relationship between the reliability of four tasks is that
Rule 1, rule 2, rule 3, and rule 4 show that the failure rate of the unit has an important influence on the reliability of the task. Only if the failure rate of the unit is controlled in a reasonable range, the task can be guaranteed to have a higher reliability. In this example, the unit failure rate must be less than 0.001. When the unit failure rate is less than 0.001, the task reliability is greater than 0.97.
Rule 4 indicates that the reliability of
Rule 5 shows that, in all cases, the relationship between the reliability of four tasks is that
Redundancy design
Redundancy design is one of the methods to obtain high reliability and high security. In order to improve the system reliability, designers often use redundancy design for key parts in the design of the manned aircraft avionics system. On the basis of the design of the manned aircraft avionics system, the redundancy design of the key parts of the UAS avionics system can also improve the reliability of the system. Based on the aforementioned analysis, we know that the data terminal of the wireless link has a great influence on the task between the node in the ground station and the node in the aerial segment. The router connected to the electronic devices in the aircraft also has a great effect on the task of the system. Therefore, we can adopt double redundancy design for the ground data terminal, the aerial data terminal, and the router, as shown in Figure 3. According to the network structure of the UAS avionics system in Figure 8, we study the relationship between the task reliability and the failure rate of the node and the router so that we reveal the effect of the redundant design for the node and the router on the reliability of the UAS avionics system.

After redundancy design, the network structure of the UAS avionics system.
According to the method of reliability modeling in this article, we can also obtain the node set, the router set, the wired link set, and the wireless link set of each task in Table 2 after redundancy design. We take

Path set of
Path set of

Figure 9 describes the correlation between the task reliability and the failure rate of the node unit, when the failure rate of the router unit is 0.0001, the failure rate of the wired link unit is 0.001, and the failure rate of the wireless link unit is 0.01. Figure 10 describes the correlation between the task reliability and the failure rate of the router unit, when the failure rate of the node unit is 0.001, the failure rate of the wired link unit is 0.001, and the failure rate of the wireless link unit is 0.01. Figure 11 describes the correlation between the reliability of

The relationship between the task reliability and the failure of the node.

The relationship between the task reliability and the failure of the router.

The relationship between the reliability of

The relationship between the reliability of
Several rules can be obtained directly from Figures 9–12, which are as follows:
Rule 6. From Figure 9, when the failure rate of the node unit is less than 0.001, we can see that the effect of redundancy design on the task reliability is small. When the failure rate of the node unit is between 0.001 and 0.01, the effect of the redundancy design on the task reliability is relatively obvious. When the failure rate of the node unit is more than 0.01, the effect of the redundancy design on the task reliability is very obvious and the task reliability has been improved by about 6%.
Rule 7. From Figure 10, when the failure rate of the router unit is less than 0.001, we can see that the effect of the redundancy design on the task reliability is small. When the failure rate of the router unit is between 0.001 and 0.01, the effect of the redundancy design on the task reliability is relatively obvious. When the failure rate of the router unit is more than 0.01, the effect of the redundancy design on the task reliability is very obvious and the reliability of
Rule 8. From Figures 11 and 12, we know that, in any cases, the reliability of
Rule 6 and rule 7 show that, with the increase in the failure rate of the node and the router, the effect of the redundancy design on the task reliability is more and more obvious.
Rule 6, rule 7, and rule 8 show that the redundancy of nodes can improve the task reliability.
Conclusion
The purpose of the reliability modeling of the system is to evaluate the reliability of the topology of the system. Based on the 5G network structure of the UAS avionics system, this article establishes task-based reliability modeling. Then, this article takes UAS performing reconnaissance as an example and analyzes the task reliability of the UAS avionics system. By analyzing the influence of all kinds of units on the task reliability, it is shown that the failure rate of the unit and number of the unit have a great influence on the task reliability, and the dual redundancy of the units can improve the reliability of the UAS avionics system. The results of this article can be used in the process of deploying drones in the IoT to meet higher safety performance demand. These results can be combined with other UAS performance research such as continuity and integrity. Generally speaking, the consequences concluded earlier will play an important role in the design of the UAS avionics system and UAS IoT architecture.
Footnotes
Acknowledgements
The authors are grateful to Ministry of Science and Technology of the People’s Republic of China.
Handling Editor: Feng Ye
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China (no. 2017YFB-0503000).