
Abstract
In complex indoor propagation environment, the non-line-of-sight error caused by various obstacles brings great error to node positioning. Choosing the appropriate signal transmission methods is important to improve node indoor positioning accuracy. In this research, ultra-wideband technology, as baseband with high theoretical positioning accuracy and real-time performance, is implemented to transmit indoor signals. The proposed fusion algorithm with ultra-wideband baseband takes advantages from both time difference of arrival and angle of arrival algorithms, combined through the steepest descent algorithm. The non-line-of-sight signal estimation error is iteratively eliminated to achieve effective positioning accuracy. The experimental results indicate that the novel time difference of arrival/angle of arrival fusion algorithm with steepest descent algorithm can largely improve node positioning accuracy and stability.
Keywords
Introduction
With the maturity of wireless communication technology, the demand for accurate indoor positioning technology in large venues, home security, and commercial and military fields is very urgent.1,2 At present, the ultra-wideband (UWB) technology compatible with the IEEE 802.15.4-2011 standard has become the main indoor positioning technology due to its unique advantages in data bandwidth, accuracy, and real-time performance. 3
In the existing positioning algorithm, the time difference of arrival (TDoA) algorithm is widely applicable because it does not require strict clock synchronization between the base station (BS) and the mobile station (MS) and can obtain more accurate positioning while maintaining strict time synchronization between the BSs. 4 With the development of smart antennas or multiple input multiple output (MIMO) antennas, the angle of arrival (AoA) positioning algorithm provides an alternative adaptive method to improve the locationing accuracy. When TDoA and AoA combine, the fusion approach5–7 not only maintains high positioning accuracy and real-time performance, the TDoA algorithm does not require synchronization of BSs and MSs, but also improves the positioning coverage to some extent by adding AoA channel measurements. 8
When there are obstacles between the BSs and the positioning MSs, which is the non-line-of-sight (NLoS) signal propagation condition between the target MS and the BSs, the signal is refracted, scattered, and so on. During transmission, the arrival time of the received signal is not the actual arrival time, thereby generating positioning estimation error. NLoS error mainly causes additional delay to the transmission of signal, resulting in inaccurate positioning of targeted object. In realistic indoor environment, reducing the impact of the NLoS error is the key aspect to improve positioning accuracy. 9 In the state of the art technologies, there are two main ways to eliminate the NLoS error. One is to use the scattering model to reduce the NLoS error, but the method is only applicable to the macrocell setup. The other is to use a weighting algorithm that has the drawback of not being able to detect measurements with NLoS errors. Li and Chen 10 proposed to add AoA measurement estimation error along with TDoA measurement estimation error using the Chan algorithm, in combination to provide a TDoA/AoA hybrid positioning algorithm. However, the method does not consider the influence of NLoS error estimation delay. When indoor environment becomes complicated and NLoS error delay is large, the positioning accuracy drops sharply. In the study by Song and Wang, 11 the Taylor series expansion method is proposed to realize TDoA/AoA fusion positioning. This method also suffers some disadvantages, which require position estimation of targeted node initial position. When initial position information cannot be obtained initially accurately, algorithm reliability is low and may fail. The Chan algorithm 12 provides small amount of computation and achieves higher positioning accuracy after two weighted least square (WLS) operations when the noise obeys the Gaussian distribution. However, in realistic NLoS environment, the error of the additional obstacle caused propagation delay, which is not taken into account. The system measurement error is only calculated as the total error of the TDoA/AoA fusion algorithm, which leads to higher probability on final positioning error estimation.
Inspired by information fusion approaches,13–16 Chan algorithm and steepest descent algorithm (SDA), 17 in this article we propose a TDoA/AoA fusion algorithm with SDA aiming to iteratively attenuate NLoS estimation error and achieve improved stable positioning accuracy in complex indoor environment. Schematic diagram of the proposed algorithm is shown in Figure 1.
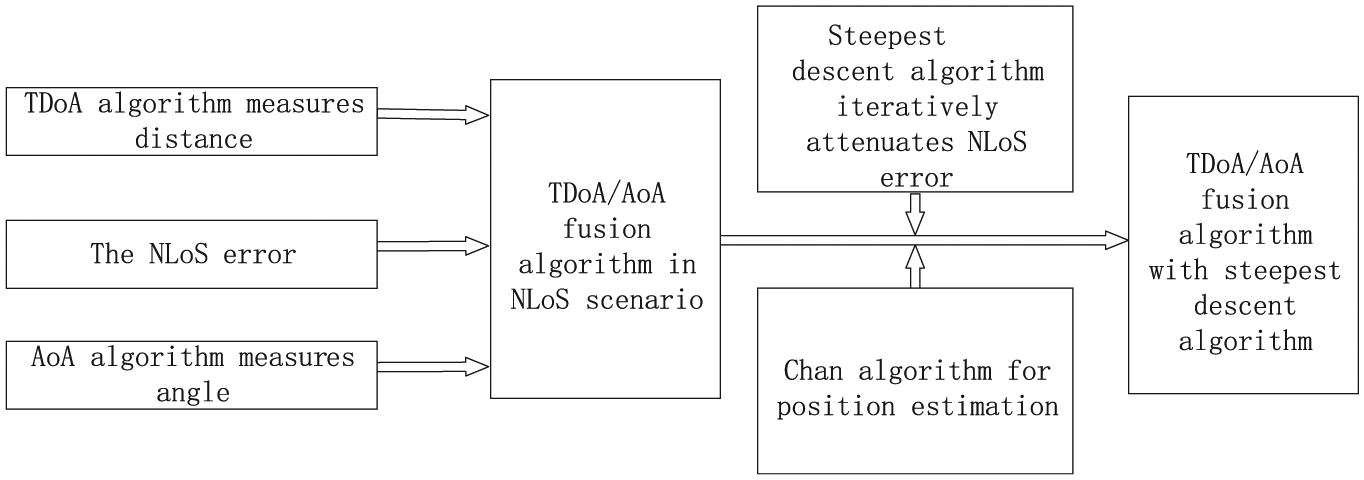
Schematic diagram of newly proposed TDoA/AoA fusion algorithm with steepest descent algorithm.
This chapter gives a brief description of the positioning techniques and related algorithms involved in this article. Section “SDA state of the art” of the article provides a brief overview on SDA and its iterative process, also with the reason of implementation. In section “TDoA/AoA fusion algorithm with SDA,” the Chan algorithm is first evaluated to calculate the TDoA/AoA fusion algorithm under the line of sight (LoS) as a comparison. Then, considering the delay error under various NLoS conditions, an improved TDoA/AoA fusion algorithm with SDA is proposed. In section “Simulations and Hainan EVK RTLS 3.0 testbed analysis,” the locationing algorithms are evaluated through computer simulation while the improved algorithm is also experimentally measured using the Hainan EVK Real-Time Locationing System (RTLS) 3.0 UWB positioning platform independently developed by our team. Section “Conclusion” provides our research conclusions with future research outlooks.
SDA state of the art
The SDA is also called the gradient descent algorithm. 18 Originally, the SDA is to find the local minimum on the mean square error performance surface by using the global search method. The calculation process is simple and widely used. Its descending principle is shown in Figure 2.

Schematic diagram of the steepest descent algorithm.
The gradient vector iteration formula is constructed by estimating the mean square error value of the random points on the weight plane, and the iteration is repeated until the point with the smallest mean square error value is found. 19 The mathematical expression of the estimated value is used to represent the instantaneous squared error, and the gradient calculation formula is

The gradient vector iterative formula of SDA can be expressed as

The value of
TDoA/AoA fusion algorithm with SDA
TDoA/AoA fusion localization algorithm with Chan algorithm in LoS scenario
When there are four or more BSs in the positioning system, a set of non-linear equations can be obtained. When the number of equations in the non-linear equations is more than the number of position variables, the Chan algorithm can use these redundant TDoA values. It is good to estimate the coordinates of the MS to achieve the purpose of improving the positioning accuracy.
20
Therefore, we assume that the number of BSs participating in the positioning is m


TDoA schematic diagram of true distance difference between BS i and BS 1 to MS.
The distance measurement difference between the MS and the BS i and the BS 1 is

Equation (3) can be transformed into

That is

where
When the primary BS provides the AoA measurement value

Let

where
Consider the measurement error and establish the error expression as

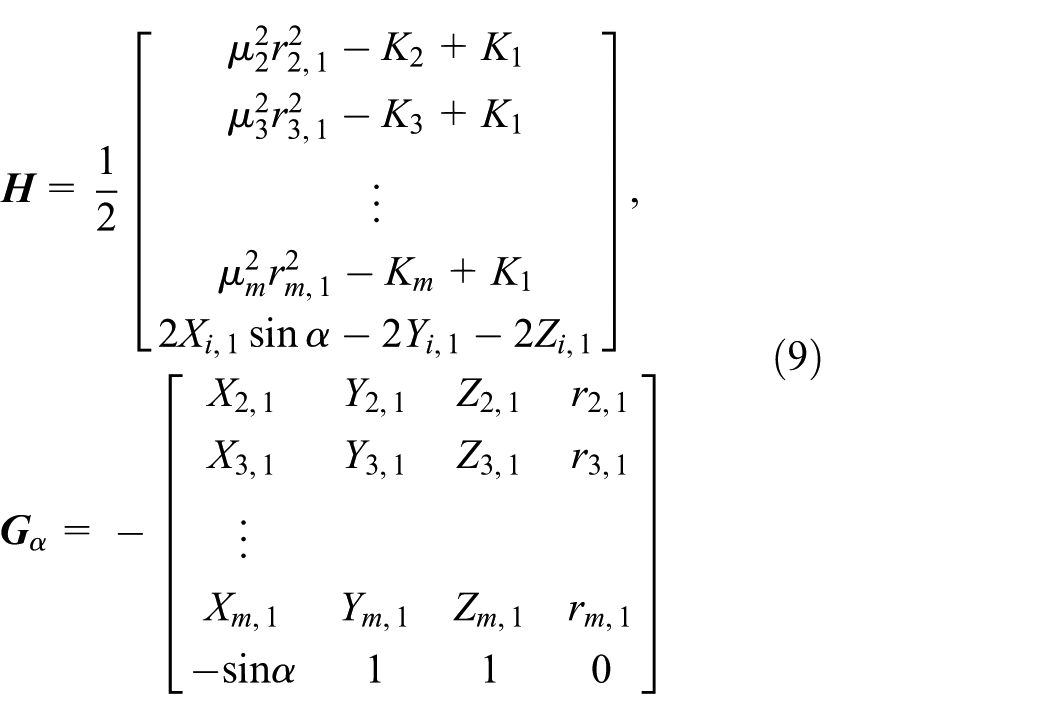
The first WLS estimation is performed according to the Chan algorithm, and the initial value of

where

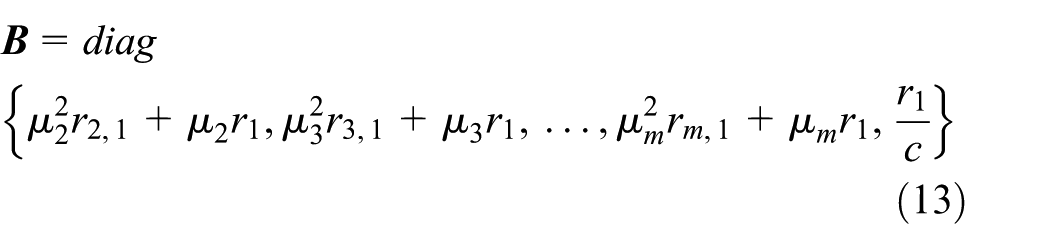


Bringing equation (13) into equations (11) and (12) yields an initial solution. After two WLS calculations according to the Chan algorithm, the final position estimate
TDoA/AoA fusion localization algorithm with SDA in NLoS scenario
When considering NLoS scenarios, equation (3) is not equal to the left and right sides, that is to say

Derivation of

Since


where






The corrected value

Simulations and Hainan EVK RTLS 3.0 testbed analysis
In order to verify the suppression effect of the TDoA/AoA fusion algorithm with SDA on NLoS error, the algorithm was verified by Hainan EVK RTLS 3.0 Testbed independently developed by our experimental team. Among them, the hardware components of Hainan EVK RTLS 3.0 mainly consist of BSs and tags, as shown in Figure 4.

(a) Hainan EVK 3.0 base station and (b) Hainan EVK 3.0 tag.
The experimental test scenario selects our team laboratory, scenario size is 10 m × 5 m × 4 m. The indoor layout model is shown in Figure 5 with four BSs, an MS and a plurality of obstacles. The BS 1 is a setup as the primary BS and is regarded as an NLoS path between the MS; the other three BSs are setup as slave BSs and are linked through NLoS paths with MSs. We first assume clock synchronization is maintained between BSs. Any BS can provide the TDoA value that is fed back by targeted MS in motion, while the AoA value is provided by the antenna array in each BS.
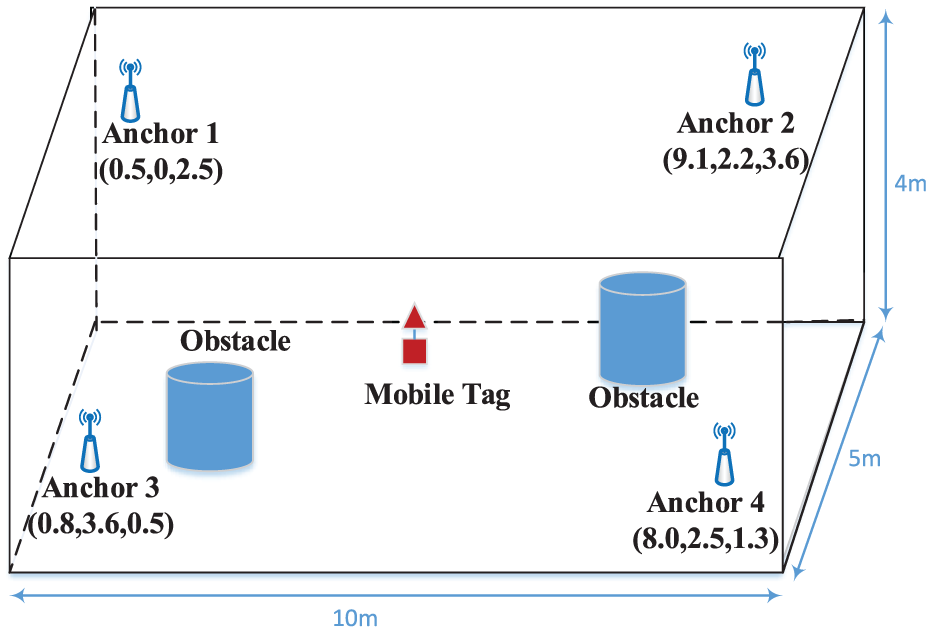
Simplified model diagram of BSs layout in indoor environment.
The coordinates of each BS are shown in Figure 5. Considering the characteristics of the Chan algorithm, the root mean square delay error of the NLoS error is generated by the GREENSTEIN model. 21 Different parameter changes are set in the test, the MS is tested in multiple locations in the room, and a total of 30 sets of positioning data are obtained. The final result of the positioning is the average of 30 sets of data. At the same time, MATLAB is used to simulate the same parameters of TDoA/AoA fusion algorithm with SDA. The experimental results take the average of 30 sets of positioning data. In this article, the root mean square error (RMSE) 22 is selected as the measurement standard of positioning accuracy. Analyzing and comparing the differences between the TDoA/AoA fusion algorithm based on the Chan algorithm, the TDoA/AoA fusion algorithm with SDA in the measured environment and the TDoA/AoA fusion algorithm with SDA using the MATLAB simulation platform under different parameter settings. In order to simplify the description, the three algorithms are sequentially recorded as algorithm A, algorithm B, and algorithm C. The mathematical expression of RMSE is

Comparison of positioning performance of three algorithms under different AoA standard deviations
Setting the linear variation in the AoA standard deviation to get the change in positioning accuracy, and the TDoA measurement error is independent of each other and obeys a Gaussian distribution with a mean of 0 and a variance of 0.2. The experimental results are shown in Figure 6.
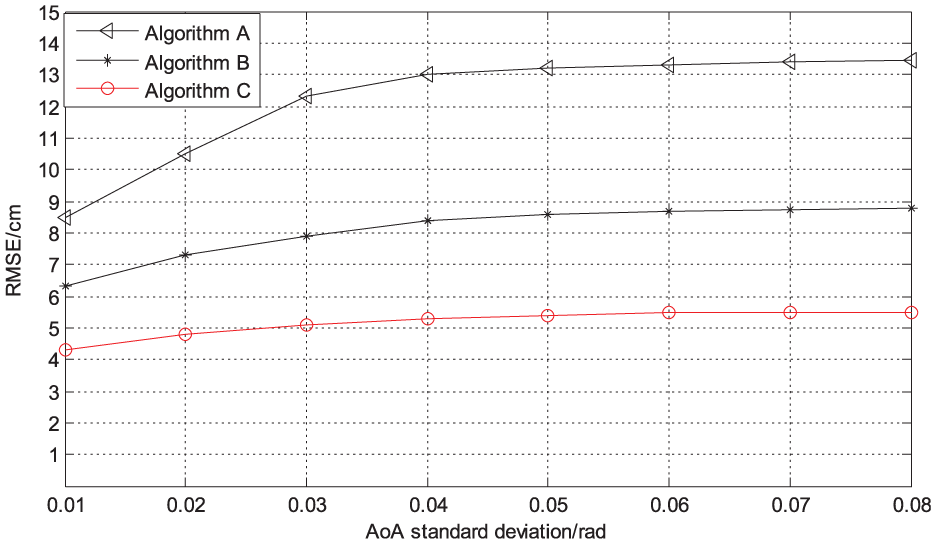
Influence of AoA standard deviation on positioning performance.
It can be seen from Figure 6 that the RMSE values of the three algorithms increase with the increase in the AoA standard deviation. In the actual measurement scenario, algorithm B uses SDA to attenuate the NLoS error factor, and the NLoS error is obviously suppressed, and the final positioning accuracy is stable at around 8.8 cm; algorithm A uses only the Chan algorithm to perform two WLS calculations and does not consider additional delays under NLoS errors, so the positioning error is large, and the final positioning error is about 13.7 cm. Upon comparing the two algorithms under different AoA standard deviations, the improved algorithm’s positioning performance is improved by about 35.7%. The positioning accuracy of algorithm C under the MATLAB simulation platform is finally stable at around 5.8 cm, which is the theoretical positioning accuracy of the TDoA/AoA fusion algorithm with SDA. It can be seen that in the TDoA/AoA fusion algorithm with SDA under actual test and MATLAB simulation test, the final positioning accuracy is only about 3 cm difference, and this shows the good applicability of the TDoA/AoA fusion algorithm with SDA. In addition, when the AoA standard deviation exceeds a certain range, the positioning accuracy of the three algorithms does not change any more, indicating that the AoA algorithm has no obvious auxiliary positioning effect on the fusion algorithm after exceeding a certain range.
Comparison of positioning performance of three algorithms under different TDoA standard deviations
The AoA measurement error obeys a Gaussian distribution with a mean of 0 and a variance of 0.08. Setting the TDoA standard deviation to 0.1, 0.2, 0.3, 0.4, and 0.5 µs, respectively, to get the change in positioning accuracy. The experimental results are shown in Figure 7.

Influence of TDoA standard deviation on positioning performance.
It can be seen from Figure 6 that when the TDoA standard deviation changes linearly, the RMSE values of the three algorithms increase with the increase in the TDoA standard deviation. It shows that the larger the measurement error of TDoA, the more obvious the positioning error is when the additional delay is fixed. In addition, upon comparing algorithm A and algorithm B, the positioning accuracy of TDoA/AoA fusion algorithm with SDA is significantly better than that of the TDoA/AoA fusion using only the Chan algorithm for position estimation. The TDoA/AoA fusion algorithm with SDA under actual test and MATLAB simulation test have little difference in positioning accuracy, which shows the good applicability of TDoA/AoA fusion algorithm with SDA.
Comparison of positioning performance of three algorithms at different test points
The TDoA measurement error is independent of each other and obeys a Gaussian distribution with a mean of 0 and a variance of 0.2, and the AoA measurement error obeys a Gaussian distribution with a mean of 0 and a variance of 0.08. Measurements were taken at multiple test points in the experimental scenario, taking the average of 30 measurements and plotting the results in Figure 8.
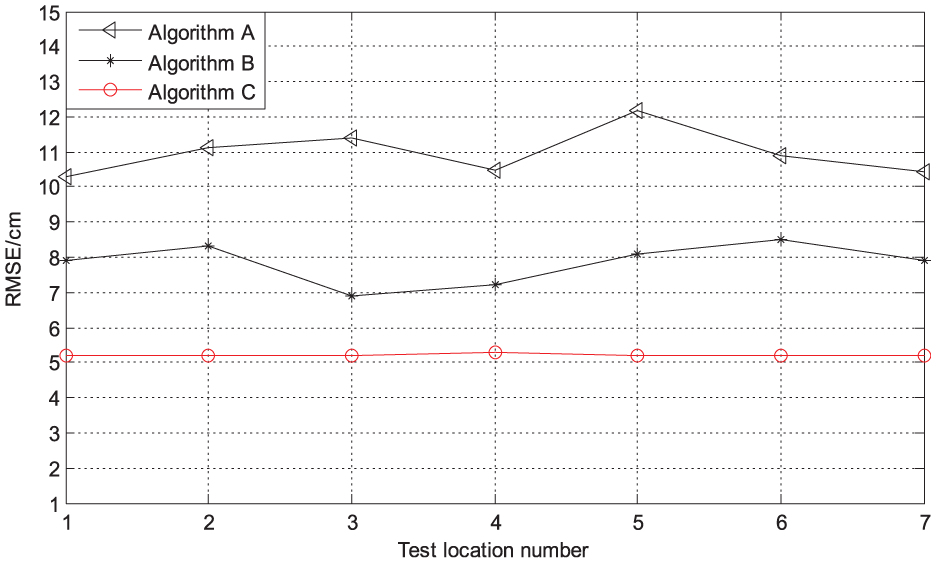
Positioning results of three algorithms at different test points.
It can be seen from Figure 8 that the positioning accuracy of the three algorithms is basically stable at different test points. In the actual measurement scenario, the positioning accuracy of algorithm A is basically stable at about 11 cm, and the positioning accuracy of algorithm B is stable at about 8 cm. The TDoA/AoA fusion algorithm with SDA positioning accuracy is improved by about 27.3% compared to the TDoA/AoA fusion using only Chan algorithm. Upon comparing the positioning results of algorithm B and algorithm C, it can be seen that the positioning accuracy of TDoA/AoA fusion algorithm with SDA is only 2–3 cm away from the theoretical measurement.
Analysis of the cumulative distribution function of positioning error for different positioning methods
Figure 9 shows the cumulative distribution function (CDF) of the positioning errors of the three algorithms. As can be seen from the figure, when the RMSE is about 8 cm, the TDoA/AoA fusion algorithm with SDA has a CDF value of up to 92%, that is, the number of effective positioning ranges in the 30 positioning measurements is about 27 times, it can be seen that the TDoA/AoA fusion algorithm with SDA has good effectiveness. Upon comparing algorithm A and algorithm B, the positioning performance of the TDoA/AoA fusion algorithm with SDA is significantly better than the TDoA/AoA fusion using only the Chan algorithm, which further shows that the TDoA/AoA fusion algorithm with SDA has obvious effect on suppressing errors.

CDF graph of three algorithms.
Conclusion
This article mainly studies how to effectively suppress NLoS errors and improve the positioning accuracy of indoor positioning technology in complex indoor scenarios. Based on the traditional TDoA/AoA fusion algorithm and Chan algorithm, an improved TDoA/AoA fusion algorithm with SDA is proposed. The NLoS error factor is iteratively attenuated by constructing the error function, which minimizes the NLoS estimation error. The experimental results show that the TDoA/AoA fusion algorithm with SDA can suppress the NLoS effect, and the positioning performance is greatly improved compared with the TDoA/AoA fusion using only the Chan algorithm. Compared with the results of MATLAB simulation, the TDoA/AoA fusion algorithm with SDA has good stability. Although the improved algorithm proposed in this article reduces the influence of NLoS error on positioning accuracy, it increases the complexity of the algorithm based on the traditional NLoS error correction algorithm. In the next step, our research will focus on deep learning-based methodologies to reduce the complexity without sacrificing the positioning accuracy and stability.
Footnotes
Handling Editor: Daming Zhou
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was financially supported by the National Natural Science Foundation of China (no. 61461017 and 61861015), the Hainan Natural Science Foundation Innovation Research Team Project (no. 2017CXTD0004), the Key Project of Scientific Research of Higher Education in Hainan Province (no. Hnky2019ZD-35), and Collaborative Innovation Fund of Tianjin University & Hainan University (no. HDTDU201906).