
Abstract
The success of the wilderness search and rescue missions is highly dependent on the time required to search for the lost person. The use of unmanned aerial systems may enhance search and rescue missions by supplying aerial support of the search process. There are unmanned aerial system–based solutions, which are capable of detecting the lost person using computer vision, infrared sensors, and detection of a mobile phone signal. The most pressing issue is reducing the cost of a search and rescue mission. Thus, to improve the efficiency of the resource utilization in wilderness search scenario, we consider the use of unmanned aerial system for both mobile phone detection and enabling Wi-Fi communication for the ground portion of the search and rescue team. Such an approach does not require specific additional tools (e.g. access point, specific user equipment) for communication, which reduces the cost and improves the scalability and coordination of the search and rescue mission. As a result, the article provides methods of searching the wilderness for a person using beacon signals from a mobile phone for two situations: when the distance to the source of emergency signals is unknown and when the distance is known. In addition, the voice transmission delay and the number of unmanned aircrafts are found to guaranty the quality of a call.
Introduction
Every year, a considerable number of people around the world get lost in the wilderness. Some of the main reasons for this lie in the inability of modern people to navigate the terrain and the overvaluation of their capabilities, including physical.
The success of a wilderness search and rescue mission is highly dependent on the time required for the search of the lost person. For algorithmization of the search and rescue operations, there were proposed POA (Probability of Area)—POD (Probability of Detection) model, which is an integral part of IAMSAR (International Aeronautical and Maritime Search And Rescue manual). 1 This model allows us to build an optimal search process based on the available data about the lost person, the area of search, physical conditions, distinguishing features.
The efficiency of the search and rescue mission can be enhanced by the use of the automated detection technologies enabled by unmanned aerial system (UAS). A flying network, which uses UAS-based technologies, allows a reduction in the time required for detection as well as reducing the number of people required for the search mission.2,3
Recent works on the use of unmanned aircrafts (UAs) in search and rescue missions utilize mobile phone detection technologies to locate the individual. Among the wireless technologies used for detection of mobile phones, there are 2/3/4G cellular networks, Wi-Fi and Bluetooth. Mobile phone detection technologies can be used jointly with a computer vision system, which improved their efficiency when there is a line of sight between the UA and the lost person. In this network, each UA can be considered as a heterogeneous mobile gateway.
The resource allocation for the search using UAS is a relevant research topic. The cost of a rescue mission is still high, even when automated UAS-based technologies are used. Thus, to improve the efficiency of resource utilization in wilderness search scenario, we consider the use of the UASs for both mobile phone detection and enabling Wi-Fi communication for the ground segment of the search and rescue team. Such an approach does not require specific additional means (access point, specific user equipment) for communication, which reduces the cost and improves the scalability and coordination of the search and rescue mission.
The main contribution of this article is the following:
We introduce the methods of wilderness search of a person using beacon signals from a mobile phone for two situations: when the distance to the source of emergency signals is unknown and when the distance is known.
We consider the simultaneous use of UASs involved in the search mission to support voice communication among the search and rescue team on the ground using Wi-Fi technology.
The rest of this article is organized by following: In the “Related works,” we take an overview the most related work and describe that there are many ways to use a UA during a wilderness search and rescue mission, which helps the task to be completed effectively. In the “Methods of searching the wildness for a person using beacon signals from a mobile” section, we consider two scenarios methods of searching the wildness for an individual using beacon signals from a mobile phone: Methods of searching for a person based on known distance to the source of emergency signals and the method of detecting the coordinates of a mobile phone when the distance to the source of emergency signals is unknown. Voice transmission by a flying network will be shown in the following section. We conclude the article in the “Conclusion.”.
Related works
Recent developments in UAS technologies have low-cost drones with considerable capabilities. Currently, the drone market is proliferating, because the UAS’s capabilities are relevant in a wide range of applications. It is difficult to cover all the applications; thus, in the remainder of this section, we will only consider rescue scenarios in order to provide additional rationale for our work.
When a disaster happens in a region, the primary aim is to coordinate disaster management operations. Such coordination may become a challenging task if the communication infrastructure is unavailable (e.g. damaged by an earthquake). The UAs may create a temporary infrastructure, acting as access points to provide wireless communication. 4
The use of UAs in Public Protection and Disaster Relief (PPDR) scenarios is not limited by launching a temporary communication infrastructure. The UAs equipped with sensors can be used to monitor the environmental pollution (e.g. composition of gases, radiations) in specific areas of damage, such as a chemical storehouse or a nuclear power plant. The information about the pollution may assist rescue teams to avoid life-treating areas. 5
Deploying a UA network autonomously and providing communication services in a disaster scenario also were considered in Sánchez-García et al. 6 In this article, an algorithm called Distributed and dynamic Particle Swarm Optimization for UA networks (dPSO-U) was presented with two main goals: exploring a disaster scenario area, and making the UAs converge to several victim groups discovered during the exploration phase. To evaluate the algorithm, the authors compared it with other algorithms through simulations and received positive results.
The UAs equipped with video cameras may help to evaluate the consequences of the disaster and provide online surveillance for better coordination of rescue teams. Real-time onboard video processing may help to identify the most impacted areas and to assess whether any individuals need help.5,7 The UAs can also assist the rescue teams to reach a particular location if standard routes are blocked.
Along with sensing or communications, the UAs can be used for the rapid delivery of necessary items to rescue teams (e.g. food, medicine, medical equipment) in the areas that are not accessible by roads.8,9
Another scenario to consider regarding UAS utilization is the UAS-assisted search and rescue of a lost person (or group of people) in the wildness. The distinguishing feature of this scenario is the enormous size of the search area and the relatively few targets (lost people). As it was mentioned in Hanna et al., 10 survivability of the lost person is higher when it is located within 24 h. Thus, the goal of the rescue team is to check the most extensive area as soon as possible. The UAs can enhance the efficiency of that search by utilizing computer vision to detect the target from the air. To enhance the efficiency of the victim detection, in Rasmussen et al. 11 it was proposed to augment visible-spectrum searching with infrared sensing.
The UAs equipped with video cameras have been used to support rescue operations utilizing image recognition for detecting the lost person. However, there are plenty of use cases when victims are buried (e.g. a snow avalanche) or covered by the tree canopy, making the computer vision methods almost useless.
To detect lost people without video methods, wireless signal detection can be utilized. Many specialized wireless beacons allow rescuers to find lost or trouble in people. These beacons are widely used by people whose activities are closely related to risks, such as hikers and climbers. Such categories of people are prepared for the circumstances when they need to be rescued. However, ordinary people can also experience emergency situations. These people are usually not prepared for such a situation. Thus, the techniques that utilizing popular personal wireless devices (e.g. smartphones, smartwatches) as beacons are highly relevant. 12
The idea of using a cell phone to locate the user is not new. In 1994, the US Federal Communications Commission compelled mobile operators to provide the location of mobile phones that dialed 911. 13 In Mendelson, 14 a method was proposed that employed features of a user’s cellular phone to emit an emergency beacon to aid first respond search and rescue units or emergency personnel. This method may noticeably extend the detection of the mobile phone. As it was shown in Wolfe et al., 15 the mobile phone signal is powerful enough to be detected even under a snow depth of 7 feet (the snow avalanche scenario). The existing solutions consider switching the mobile phone into a beacon mode. 16 In this mode, the mobile phone transmits a beacon signal, which can be more powerful than a regular one. The beacon signal may be used to locate the user.
The UA equipped with a mobile base station or software defined radio may significantly reduce the time for mobile phone detection if there is no coverage in the area of search. Optionally, for the detection of the mobile phone using UA, Wi-Fi or Bluetooth can be utilized. 17 Moreover, if the media access control (MAC) addresses of wireless interfaces are known, the user detection can be performed more efficiently. 18
The real use case described in Goodrich et al. 19 has shown that resource allocation is a crucial challenge when using UA to support a wilderness search. To address the resource optimization challenge, the methods of using UA for wireless signal detection must take into account a broad range of parameters including the number of UA used, the UA’s battery capacity, coverage probability, target mobility, and the area of search size.
The coverage probability problem was partially addressed in Guo et al. 20 by providing a guideline for the design of a wireless network. The issues of target mobility, optimal UA route, and battery use are considered in Mohibullah and Simon. 21
Through related works, it can be seen that with the use of UAs the efficiency of the search and rescue mission is enhanced. Locating the victim in these cases is one of the critical problems. Based on the above studies, by using UAS, we consider the ability to locate and provide communications for lost people outside the cellular networks.
Methods of searching the wildness for a person using beacon signals from a mobile phone
In this section, we consider methods for searching a lost person based on the detection of SOS signals from the mobile phone. UAs, which fly around the area of the lost person, are used to scan the signals.
Scenario description
One of the options for signaling a request for help may be an application in a mobile phone that generates SOS signals and sends them over cellular and Wi-Fi channels. Suppose that an application has been installed on the mobile phone of the missing person that will help create emergency signals (beacons) with an intensity of once per minute. The proposed solution is, in fact, an analog of the emergency warning system, which is used in the automotive industry to signal an emergence.
It is evident that the signal from the mobile phone must be transmitted to the base station of the telecom operator; however, due to the remoteness of the forest, the power of the mobile phone transceiver may not be enough to receive the signal.
The solution to this problem is to send one or more UA, which surveys the territory in which a person is supposedly lost and the scanning of emergency signals, as Figure 1. On board, the UA is a portable base station, implemented by software-configured radio. Because the onboard UA base station receives data in a certain radius, depending on the antenna aperture, the number of UA used affects the speed of searching for the coordinates of the missing person.

UA overflights areas to scan emergency signals from mobile phones. UA: unmanned aircraft.
In the case of detecting emergency signals, UA coordinates are fixed regarding GPS/GLONASS in the place where these signals were detected.
Methods of searching for a person based on known distance to the source of emergency signals
One of the methods for calculating the distance is the energy conversion of signals between the receiver and transmitter—the Received Signal Strength Indicator (RSSI). Because the UA is in the air, it can be assumed that there will be direct visibility between the mobile phone and the UA. Thus, it becomes possible to calculate the distance between the portable base station and the source of emergency signals. Figure 2 shows the interaction of a UA with a mobile phone. The coordinates of the UA are known, but to determine the coordinates of a mobile phone, it must receive at least three emergency signals. It will deliver it using the triangulation algorithms to determine the coordinates of the mobile phone.
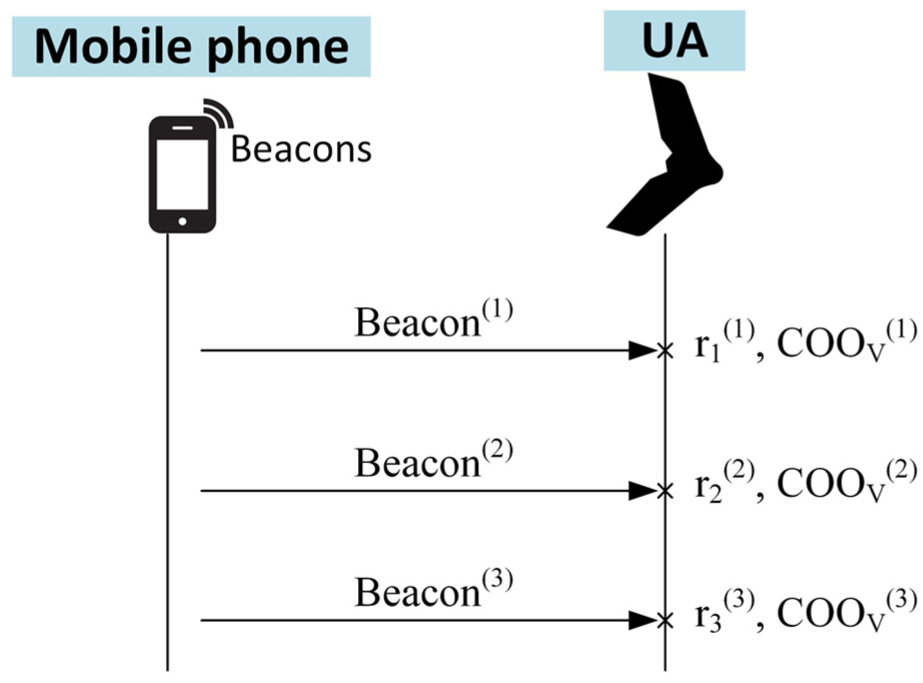
The interaction process between a UA and a mobile phone. UA: unmanned aircraft.
It is worth noting that the detection zone or radio coverage zone of the UA is limited to radius

where
Figure 3 shows the detection method of a mobile phone that sends emergency signals. According to the Figure 3, the desired point is found at a distance

Method for determining the coordinates of a mobile phone using UA. UA: unmanned aircraft.
Therefore, we obtain a system of equations of the form

where
In the case of three-dimensional space, the system (1) must contain at least three controls, that is,
The presented system of equations can also be used for the case of using the UA group with

A group of three UA overflights. UA: unmanned aircraft.
Besides, the probability also depends on the flight speed of the UA and the frequency of sending emergency signals.
The method of detecting the coordinates of a mobile phone when the distance to the source of emergency signals is unknown
In the first case, the distance between the UA and the mobile phone, which is the source of emergency signals, was calculated based on the RSSI. The accuracy of determining the distance depends on the absence of interference on the path between the source and the receiver, as well as a direct line of sight. In some cases, there may be obstacles in the form of trees, fog, and other interfering environmental influences between the mobile phone and the UA; therefore, it is advisable to consider a method for detecting the coordinates of a mobile phone when the distance from the UA to the source of emergency signals is unknown. Each UA can detect emergency signals within a radius

is satisfied when considering the two-dimensional space on the earth plane. Figure 5 presents the case when the coordinates of the center of the circle
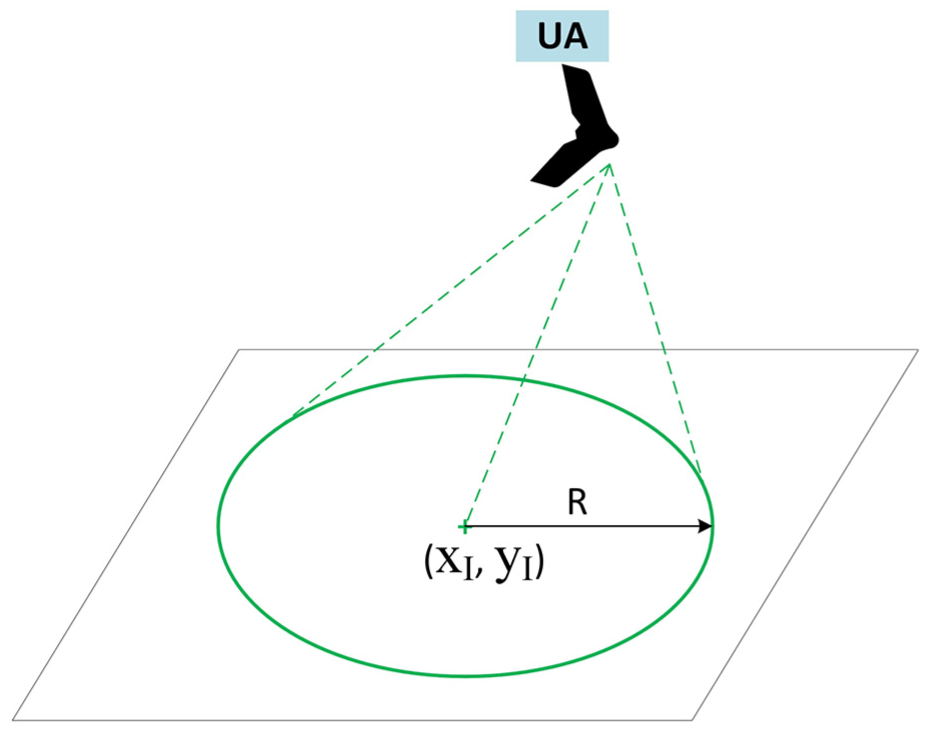
Representation of UA coordinates as a center of a circle with radius
Figure 6 showed the case when three positions of emergency signals were detected on the earth’s surface. According to Figure 6,

The method of detecting the coordinates of a mobile phone at the intersection of the zones with coordinates
A mobile phone (desired point) will be located at the intersection of several circles, with the coordinates of the centers of the rings and the radius

where
By expression (2), you can find the interval to which the coordinates of the mobile phone belong. When considering the case using the UA group (with
Evaluation of searching time
The searching process using UA is represented by two steps:
UA flies and scans beacon signals.
When a UA detects the first beacon signal, in order to get enough of the beacon signals, UA begins flying around in a circle of radius
The process of the search for beacon signals using UA is presented in Figure 7.

Flow diagram illustrating the process of the search for beacon signals using UA. UA: unmanned aircraft.
It is assumed that speed of UA—

To calculate the coordinates of the desired point, UA requires at least 2 more beacon signals after the first signal is detected. Since UA fly within a circle with radius

Therefore, the searching time is described in the formula (5)

An application, installed on the mobile phone generates beacon signals with a period of 12 s, thus speed of UA should be set to less than
When changing the speed of UA from 10 to 15 m/s with

Dependence of searching time on the speed of UA. UA: unmanned aircraft.
Voice transmission by a flying network
One of the possible scenarios in the search for a missing person is the lack of communication due to the remoteness of the cellular base station, as well as potentially difficult meteorological conditions when the communication range is significantly reduced. This section presents an alternative solution for the provision of communications based on UA. Today, most mobile phones support Wi-Fi technologies of various IEEE 802.11a/n/ac standards. This technology can be used to transmit voice over Wi-Fi based on voice over Wi-Fi (VoWi-Fi)22,23 applications. In this case, the UA is represented as a mobile node with a base station gateway located on it through which it communicates with other subscribers.
The hierarchical structure of the UAS
To solve this problem, it is supposed to use a flying network consisting of a set of UA, which are mobile access points and relay the received/transmitted data to a stationary base station, which operates in the normal mode. 24 The novelty of this approach is that it is possible to launch the UA quickly, thereby introducing an additional mobile base station to provide communication between the person and the emergency operator. Since the distance between a person in the forest and the position of the emergency services operator is considerable, to ensure communication, many UA are required even within the line of sight. It is also worth considering that the signal is transmitted through several hops and due to an increase in network delay, the quality of voice transmission decreases. To improve the quality of service and also reduce the required number of UA, it is proposed to divide the UAS into two levels. The first level will consist of the head UA and the second level of one of the members of the UA in each group (Figure 9).

Unmanned aerial system hierarchical structure for providing voice services. UA: unmanned aircraft.
Second-level UAS interact with subscribers and search for the shortest route to transfer data to the head UA, which is located on the first level. Next, the first-level UAS transmits data to a stationary base station through other head UAs. Thus, instead of transferring data through all UA, the number of intermediate nodes is reduced by introducing two levels of hierarchy. The role of the mobile base station for subscribers will be performed by a Wi-Fi access point onboard the UA, which supports the IEEE 802.11n, IEEE 802.11ac, IEEE 802.11p standards. Because VoWi-Fi technology is widespread in a large number of mobile phone models, it can be assumed that this approach allows making calls over Wi-Fi while organizing a flying network with support for these technologies. It is also worth noting that all calls are made through the operator with the preservation of numbering and identification of subscribers of the mobile communication network.
We assume that the connection between the UA and the subscriber is based on the IEEE 802.11n/ac standard since currently, most mobile phones support these technologies. Communication between UA members in the group of the first level and between members of the second-level UAS is based on the IEEE 802.11p standard, which was developed for wireless information transfer between vehicles with the support of self-organization. Communication between the head UAs in different groups is performed using IEEE 802.11p* technology in advanced mode, within which data can be transmitted over a distance of 750 m.25–27
Coverage model for each group of UA: calculation of the coverage area depending on the height of the UA and the range of interaction
In the first stage, it is necessary to determine the relative position between the UA and the subscriber. To do this, set the source data. Suppose that a UA is flying at a constant speed
According to Figure 10, a subscriber can make calls when a UA is present in the range of selected data standards—IEEE 802.11n/ac (point


Schematic representation of the distance between all elements of the interaction model under consideration. UA: unmanned aircraft.
Now we calculate the distance between the members of UA in one group, which is equal to

According to Figure 11, it can be seen that the maximum number of UA members in a group along a straight line is 10 (5 on the left and 5 on the right) and the maximum number of hops during voice transmission from the subscriber to the head UA is 5. The communication between two cluster heads in the MESH mode is enabled by the IEEE 802.11p standard.
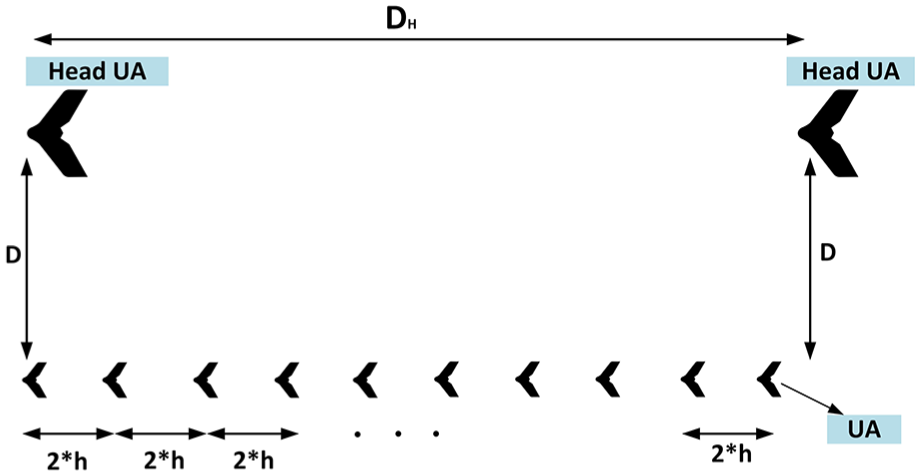
UA interaction in the group to ensure continuous communication for subscribers. UA: unmanned aircraft.
Since the distance between the UA is 56.56 m, and the radius of data transmission at the UA is 100 m, overlapping zones may occur as shown in Figure 13. To calculate the coverage area of UA groups, it is necessary to calculate the coverage area at least between two UA.
The coverage area of a single UA is a circle with a radius


Coverage area of one UA. UA: unmanned aircraft.
In Figure 13, the coverage area between two UA is equal to the total coverage area of two UA minus the overlap of two areas and is equal to


where


Schematic representation of the area of coverage between two UA, taking into account the overlap of two areas. UA: unmanned aircraft.
As shown in Figure 13



Since the distance between the UA in the same group is the same, the excess area


Continuous connection method to ensure guaranteed communication
In Wi-Fi networks, each station (STA) is associated with an access point (AP) located onboard the UA. When the UA moves, the access points move through the zones, respectively, so mobile phones reconnect to the available access point, but the transmission of voice traffic does not stop. This process is called handover. To ensure seamless connectivity, one needs to speed up the handover process. The handover process consists of four main steps:
Detection of a possible set of access points to which data can be transmitted;
Select the access point (AP) destination;
Communication with this access point;
(Re)authentication of the mobile station STA in the network.
The article 28 showed that mobile phone authentication is an essential requirement for security on Wi-Fi networks. In particular, due to the lack of a physical connection between the STA and the AP, authentication becomes indispensable for controlling access to the network. However, the authentication mechanisms used in Wi-Fi are quite slow and cannot guarantee low latency to ensure handover.
The handover process has three main elements:
A mobile station (STA)—mobile phone;
An access point (AP) located onboard the UAs, which are deployed in the second level (Figure 9);
Server authentication, authorization, and accounting (AAA) located onboard the UAs, which are deployed in the first level (Figure 9).
The Figure 14 shows the delay time in each handover step.

Interaction of elements to support the handover process. 28 STA: mobile station; AP: access point; AAA: authentication, authorization, and accounting.
Typical communications messages protocols involved in the process are represented by arrows between the vertical lines (Figure 14).
The first phase of the handover process is to check whether the conditions need to be changed by the AP and, if so, which AP should be associated with the STA. This phase can last several seconds, but this phase can do this without actually breaking the connection. The next stage of the handover process contains an empty authentication step, which is a legacy of WEP (Wired Equivalent Privacy) security architecture, which takes a very short time. The next step is the association phase, in which the STA establishes a logical connection with the AP. The purpose of this step is to notify the entire network that the STA can now be connected to any other AP. The time required for the association is insignificant, so there is no need to spend any money on accelerating this phase.
The actual authentication phase begins after the association phase. In this phase, the STA is authenticated to the AAA server, which helps to configure a shared session between the STA and the AP. As we will see later, this phase can take a significant amount of time, especially if the AAA server is remote.
Finally, STA and AP perform a four-way handshake, as a result of which they agree on the knowledge of the session key with each other, and they also receive new keys from the shared session key for various purposes. A quadrilateral handshake is necessary to comply with the IEEE 802.11i standard; it cannot be shortened.
In Bohák et al. 28 and Aboba and Alimian, 30 it was proved that the authentication phase takes a lot of time, and therefore the right idea is to accelerate this phase.
To achieve this goal, in Bohák et al.
28
the authors propose modifying the EAP-SIM protocol, which is described in RFC 4186.
31
The authentication mechanism of the EAP-SIM protocol is based on the scheme used in GSM networks to authenticate subscribers. In the case of a Wi-Fi network, the STA and the AAA server share a public key
The basic idea of modifying the EAP-SIM protocol is to consider the case when a mobile device that is already connected to the network connects to another access point, in which case the triplets necessary for its authentication will already be available in the new access point and there is no need for remote communication. In the case where the handover process occurs, such triplets should already be possible, since they are preloaded during pre-authorization when the STA is still connected to the old access point. If the triplets are in the database, authentication can be performed locally. This means that the STA does not need to contact the AAA server during the handover process. In the end, the authors found a way to reduce authentication latency below 55 ms.
If we consider the application of the above method to our task, then it is known that mobile phones are stations (STAs), and first-level UAS will play the role of AAA North, and second-level UAS will play the role of an access point (AP). In this case, the handover time will be less than 55 ms, and thus, in the call time between the subscriber and the rescue services, every 13 s, the handover time will be below 55 ms (at a UA speed of 15 m/s). Since the handover time is concise, it can be assumed that it does not significantly affect the quality of the call.
Service quality model
Above, the hierarchical structure of UAS was considered as a flying network model, which is used to provide voice transmission services. In order to evaluate the performance of this structure, we will represent it as a Queuing System (QS), in which each UA is represented by an element that has the function of receiving and transmitting voice traffic. 32
First, to use this service, a mobile phone must undergo an authentication procedure with a base station. After that, the mobile phone will get access to the service, and the UA nodes will also receive information about mobile phones. A call between two subscribers, for example, between the missing subscriber and the rescue service, will be performed by interacting with each other through the UA chain. The UAS-based flying network model is satisfied with the condition of acceptable quality for voice transmission if the network delay is no more than 100 ms between two subscribers. 33
Figure 15 shows schematically that the network delay in this scheme consists of the processing time, the waiting time for the queue, the transfer time between the subscriber unit and the UA, between the UA, and the transfer time between the UA and the base station. The average delay can be represented mathematically, as in the formula (12)

where

Schematic representation of the interaction of mobile phones through the chain UA. UA: unmanned aircraft.
To calculate the delays in this system, consider the multiphase QS model presented in Figure 16. Suppose that the incoming flows to each QS have the same properties. Consequently, it is possible to calculate the average time spent on the delivery of one application in each QS.
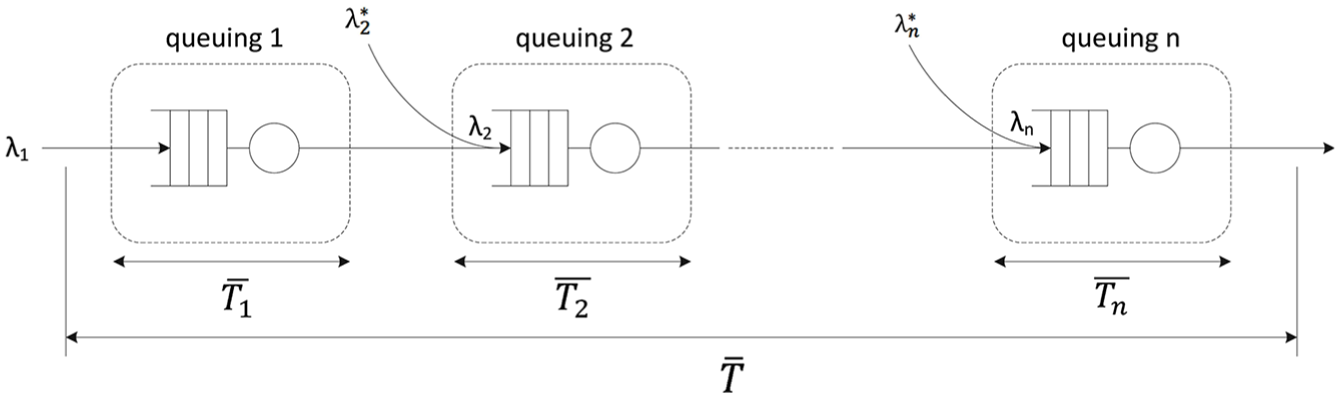
Queuing model of flying network for emergency call.
The average delivery time in multiphase QS can be represented by the expression (13)

where
According to the requirement of voice quality, it follows that the total time T should not exceed 100 ms. According to the formula (13) and the considered architecture of the flying network, it is possible to calculate the number of UA head nodes that are required for the organization of the network to transfer voice between two subscribers. Knowing the number of UA nodes, we will know the maximum possible distance between the base station and subscriber devices in the forest or the area of coverage in which subscriber devices should be located. It is assumed that the time between the subscriber and UA

It is assumed that in Figure 16 each phase of the QS is considered an M/M/1 service model, in which the voice traffic has the properties of the most straightforward flow and the service time obeys an exponential distribution. At each phase or each QS, there is an intensity of loading the system, which can be represented by the formula (15)

where
When considering the M/M/1 model, we will use the formula to calculate the time of the application in the Kleinrock 34 system. Accordingly, the average delivery time in each QS can be calculated using equation (16)

where
As noted above, subscriber devices currently support IEEE 802.11n/ac Wi-Fi technologies, which provide relatively high data transfer rates. According to the IEEE 802.11n standard, the maximum data transfer rate is
Consequently, it is possible to calculate the average duration of service requests by the formula (17)

where
Previously, the hierarchical structure of the UAS organization was considered, based on the introduced assumptions, it was possible to find out the number of nodes (hops) in each UA group, that is,
Delivery time depends on the number of unmanned aircraft (UA) groups.
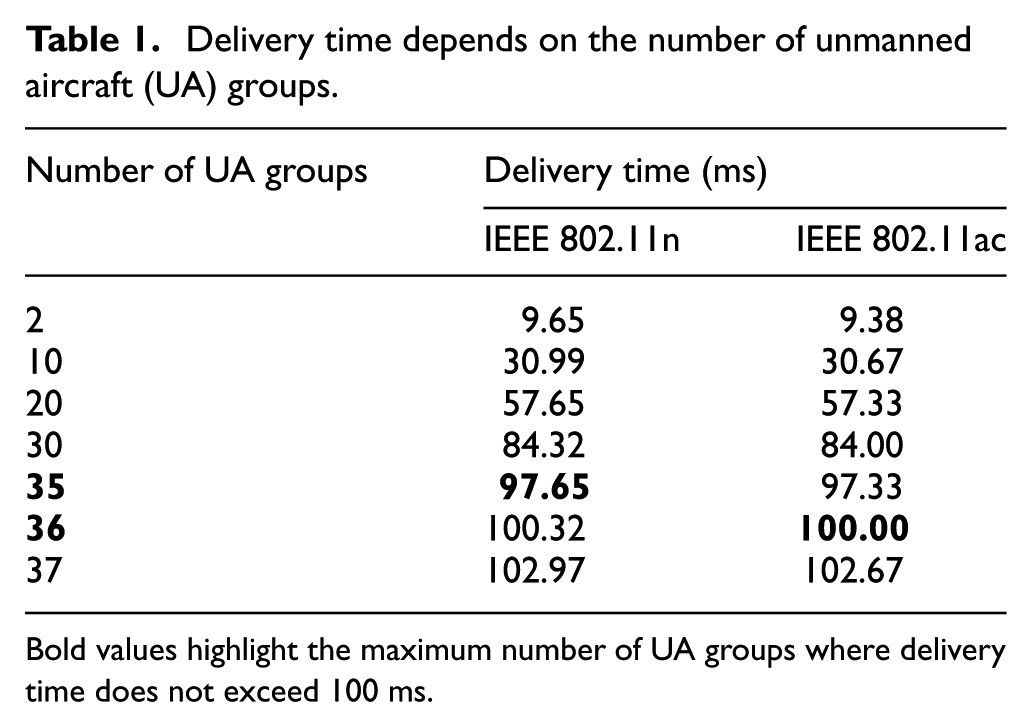
Bold values highlight the maximum number of UA groups where delivery time does not exceed 100 ms.
Table 1 shows the calculation of the time of delivery of voice between subscribers when changing the number of UA for the model M/M/1 when loading the entire system 0.5. According to the table, the required number of UA is established to cover the area and provide communication in the forest. Under this condition, the voice delivery time does not exceed 100 ms; then, according to Table 1, we obtain the maximum number of UA groups—35 UA groups when the IEEE 802.11n standard is used; 36 groups when using the IEEE 802.11ac standard. It is seen that the difference is insignificant because the main delay time for voice transmission is the transmission time through the UA, which is used in the IEEE 802.11p standard. We know that the more UA groups, the more extensive the coverage. Therefore, the results that are presented in Table 1 also show the maximum coverage of the area, provided that the voice delivery time is no more than 100 ms. In a real situation, there is a dependence on the distance between the target zones and the base station, in which case we can determine the number of important UA groups for deployment, but not more than 35 groups. For example, the distance between base stations is usually in a section of 3–5 km; if one needs to transmit a voice (about 5 km), you need about 11 UA groups, then you get a coverage area of
According to the data in Table 1, we also get graphs of the changes in the delay time, depending on the number of UA groups (Figure 17). As can be seen from the graph, the voice transmission latency for the mobile phones supported by either IEEE 802.11n or IEEE 802.11ac are not significantly different. However, if the voice transmission data are transported across multiple UA groups, the latency will naturally increase. Most of this delay will depend on the number of head nodes (head UA), through which packets are passed, and the technology used to communicate between UAs.

The change in the delay time, depending on the number of UA groups. UA: unmanned aircraft.
Furthermore, the model using UA is considered when changing the load factor of each phase of the QS. Consequently, we obtain the average delivery time and, accordingly, the number of UA groups depending on the load intensity. According to the formulas (13), (14), (16) and (17), the results of calculating the delivery time and the number of UA groups are presented in Table 2.
Delivery time and the number of unmanned aircraft (UA) groups, depending on the load factor.

It is seen that the higher the number of UA groups, the greater the delivery time between the two subscribers. Under Table 2, which shows the dependence of the number of UA groups, which can provide the required quality of service
According to the data in Table 2, we also get graphs of changes in the number of UA groups, depending on the load factor; with the maximum delivery time may not exceed 100 ms (Figure 18). Load factor increases corresponding to the growth of requests sent to the head nodes. This suggests that many subscribers requiring a connection are not in the same UA group, but in other groups on the link. The higher the load factor is, the narrower the radius will be for guaranteed voice transmission, for example, when

The changes in the number of UA groups, depending on the load factor. UA: unmanned aircraft.
Conclusion
The article reviewed the methods wilderness searches for a person using beacon signals from a mobile phone by using UAS for two situations: when the distance to the source of emergency signals is known and when the distance is unknown. We considered the simultaneous use of UAs involved in the search mission to support the voice communication among the search and rescue team on the ground using Wi-Fi technology. The architecture of a network model for connecting mobile subscribers was presented, which is organized on the basis of a flying network, in which IEEE 802.11p technology is used for UAs communication, and IEEE 802.11n/ac technology for communication between UAs and mobile phones. We also considered the impact of handover on quality of service of calls, as UAs become mobile base station. Quantitative and qualitative values are obtained, which allowed us to use equipment more efficiently, as well as minimize network latency. The article analyzed the model of multiphase queuing system type M/M/1 which are considered for UAs communication, as well as for communication between mobile phones and UAs. We calculated the voice transmission delay and the number of UAs. The results showed that the use of a two-tier architecture has reduced number of UAs, at which permissible quality of service of calls in the disaster zone can be guaranteed and the maximum number of UAs can be achieved while still guarantying the quality of the call. It also means that the coverage of the area can be achieved with this amount of UAs. As further research, an experiment is planned to confirm the results.
Footnotes
Handling Editor: Daniel Gutierrez-Reina
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The publication has been prepared with the support of the “RUDN University Program 5–100.”