
Abstract
Subdivision surface and data fitting have been applied in data compression and data fusion a lot recently. Moreover, subdivision schemes have been successfully combined into multi-resolution analysis and wavelet analysis. This makes subdivision surfaces attract more and more attentions in the field of geometry compression. Progressive interpolation subdivision surfaces generated by approximating schemes were presented recently. When the number of original vertices becomes huge, the convergence speed becomes slow and computation complexity becomes huge. In order to solve these problems, an adaptive progressive interpolation subdivision scheme is presented in this article. The vertices of control mesh are classified into two classes: active vertices and fixed ones. When precision is given, the two classes of vertices are changed dynamically according to the result of each iteration. Only the active vertices are adjusted, thus the class of active vertices keeps running down while the fixed ones keep rising, which saves computation greatly. Furthermore, weights are assigned to these vertices to accelerate convergence speed. Theoretical analysis and numerical examples are also given to illustrate the correctness and effectiveness of the method.
Introduction
Wireless multimedia sensor network (WMSN) 1 is a network of wirelessly interconnected sensor nodes equipped with multimedia devices, such as cameras, microphones, and other sensors. Compared to traditional wireless sensor networks (WSNs), 2 WMSNs can sense the multimedia information such as retrieve videos and audio streams, still images, and scalar sensor data. Recently, it has been widely applied in both civilian and military areas which require visual and audio information such as surveillance sensor networks, law-enforcement reports, traffic control systems, advanced health-care delivery, automated assistance to elderly telemedicine, and industrial process control. Sensor nodes of WMSNs have low computation capability, small memory, and limited energy performances. This makes WMSNs suffer from many constraints, including susceptibility to physical capture, tremendous transmission of multimedia data, and the use of insecure wireless communication channels. Moreover, when sensor nodes collect regional information and upload them to the base station, there are plenty of redundant data in the process of uploading. As the various applications of WMSNs increase, these problems become more complex. Furthermore, WMSNs have additional requirements such as in-node (sensor node) multimedia processing techniques (e.g. distributed multimedia source coding and data compression3–5), application-specific quality of service (QoS) requirements, 6 and multimedia in-network processing techniques (e.g. storage management, data fusion, and data aggregation7–11). Subdivision surface and data fitting have been applied in data processing techniques (data aggregation, data compression, and data fusion) a lot recently. The application of these technologies on sensors will alleviate the shortcomings of sensors and reduce the limitations of WSNs. Moreover, with the development of the second-generation wavelet analysis and multi-resolution transmission framework theory, subdivision schemes have been successfully combined into multi-resolution analysis and wavelet analysis. This makes subdivision surfaces attract more and more attentions in the field of geometry compression.
Subdivision surfaces refer to a class of modeling schemes which define objects by refining certain initial control meshes. 12 Subdivision surfaces are easy to implement, they can model surfaces of arbitrary topological type, and the continuities of these surfaces can be controlled locally. A subdivision scheme is called an interpolating one if the limit surface interpolates the given control mesh, such as Butterfly and Kobbelt schemes.13,14 Otherwise, it is called an approximating scheme, such as Catmull–Clark, Doo–Sabin, and Loop schemes.15–17 Approximating subdivision surface usually has better quality than that of interpolating one, but approximating method is unable to interpolate the vertices of the initial control mesh. Traditional methods which make the approximating subdivision surface interpolate the initial mesh need to solve a global linear system.18,19 It is computation intensive and hard to deal with dense meshes. Progressive–iterative approximation (PIA) method has been introduced to solve these kinds of problems. It was first presented by Qi et al. 20 and De Boor 21 which was called the “profit and loss” method for cubic B-spline. Lin et al. 22 proved the convergence in 2004. Later, Lin et al. 23 generalized the method which showed that the algorithm is convergent for normalized and totally positive basis, and formally named the method as PIA method. Recently, Lin and colleagues24–27 applied the method in many areas. Recently, Cheng et al.,12,28 Chen et al., 29 and Deng and Ma 30 introduced PIA method into subdivision schemes. Without solving linear system of equations, these methods calculate the approximating subdivision surfaces that interpolate the initial meshes by adjusting the vertices of control meshes iteratively. It can handle control meshes of any size and any topology while generating smooth subdivision surfaces that faithfully resemble shapes of initial meshes. But there are still a few troubles to overcome. When the number of original vertices becomes huge, the convergence speeds become slow and computation complexity becomes huge. In order to solve these problems, adaptive progressive interpolation subdivision scheme is proposed in this article. The vertices of control mesh are classified into two classes: active vertices and fixed ones. These two classes of vertices are changed dynamically according to the result of each iteration when precision is given. Only the active vertices are adjusted, thus the number of active vertices keeps running down while the number of fixed ones keeps rising, which saves computation greatly.
The main contributions of the article are listed as follows:
Adaptive data fitting algorithm is presented in this article; it can handle large-scale data points and save computation greatly.
Weighted adaptive algorithm is also presented here in order to control the convergence rate adaptively.
The algorithm possesses the common advantages of adaptive data fitting algorithm and weighted adaptive algorithm.
This article is organized as follows. Theory basis of the algorithm is presented in section “Local weighted progressive interpolation algorithm for Loop subdivision surfaces.” Fitting precision analysis is given in section “Fitting precision analysis.” In section “Adaptive data fitting algorithm and weighted adaptive algorithm,” adaptive data fitting algorithm and weighted adaptive algorithm for Loop subdivision surfaces are given. Plenty of experimental examples are illustrated in section “Numerical examples.” Conclusions are drawn in section “Conclusion.”
Local weighted progressive interpolation algorithm for Loop subdivision surfaces
Zhao et al. 31 have shown that progressive interpolation subdivision schemes can interpolate vertices globally or locally according to different application backgrounds. Local property of progressive interpolation brings more flexibility for shape control and makes adaptive fitting process possible. Local weighted progressive interpolation algorithm for Loop subdivision surfaces is proposed, which can be applied to the other approximating subdivision surfaces. The process of local weighted progressive interpolation is as follows.
Given a triangular mesh
After k iteration, we can get the kth triangular mesh


where
By repeating the above process, a sequence of meshes

Let
Theorem 1
As k tends to infinity,


Proof
For the active vertices set, that is,

By equations (1), (2), and

where n is the valence of vertices

It has been proved that

Thus, we have

which means the difference vector
For the fixed vertices set, that is,

By equations (1), (2), and

where

As

By equation (3)

For any
Theorem 1 means that the difference vectors of the active set converge to zero and those of the fixed set converge to a constant.
Fitting precision analysis
In this adaptive fitting algorithm, the initial vertices are divided into two dynamic adjustable subsets. The active set which needs to be adjusted decreases during the process of iteration, while the fixed set which does not need to be adjusted keeps increasing. Thus, the key is to deduce the norm bound of each limit difference vector corresponding to the fixed vertex.
In the kth iteration, the index set of active vertices is
Lemma 1
Assuming

where n is the number of vertex
Proof
Assuming the initial index set of the active vertices is

where

The difference vector

Thus, we have

According to the properties of the norm, we get

With

which proves the lemma.□
Lemma 1 determines the norm bound of the limit difference vector. Theorem 2 gives the condition to determine whether the active vertex can be fixed or not.
Theorem 2
Supposing

then the vertex

where
Proof
Since

Then, we can get

With

Thus, we have

It means that
Furthermore, we can combine the adaptive data fitting algorithm and the weighted adaptive algorithm. Both the algorithms have advantages.
Adaptive data fitting algorithm and weighted adaptive algorithm
In this section, pseudo-codes of the adaptive data fitting algorithm and weighted adaptive algorithm are given. They are listed as follows.
These two algorithms can be combined during implementation. Applying algorithm 2 to active set in algorithm 1 makes algorithm 1 have better convergence rate and also save a lot of computation. Furthermore, the convergence rate of each vertex can be controlled.

Numerical examples
Algorithm 1: adaptive data fitting algorithm based on the Loop subdivision surface
In this section, six numerical examples are given to compare the computational efficiency of the two different algorithms, namely, normal PI and the adaptive algorithm. For simplicity, we take three basic operations in each iteration as one computational unit. These operations are new vertex generation, vertex evaluation, and difference vector calculation.
Figure 1 is model Bishop. Table 1 shows that normal PI costs 6 iterations to reach the pre-defined precision

Fit model Bishop by the adaptive algorithm, where the initial mesh is displayed in red and the subdivision surface is displayed in yellow: (a) #iter. = 0, #act. = 250; (b) #iter. = 1, #act. = 249; and (c) #iter. = 7, #act.= 3.
Iteration times and precisions of model Bishop.

Figure 2 is model Ant. Table 2 shows that normal PI costs 5 iterations to reach the pre-defined fitting precision

Fit model Ant by the adaptive algorithm, where the initial mesh is displayed in red and the subdivision surface is displayed in yellow: (a) #iter. = 0, #act. = 298; (b) #iter. = 1, #act. = 266; and (c) #iter. = 6, #act. = 47.
Iteration times and precisions of model Ant.
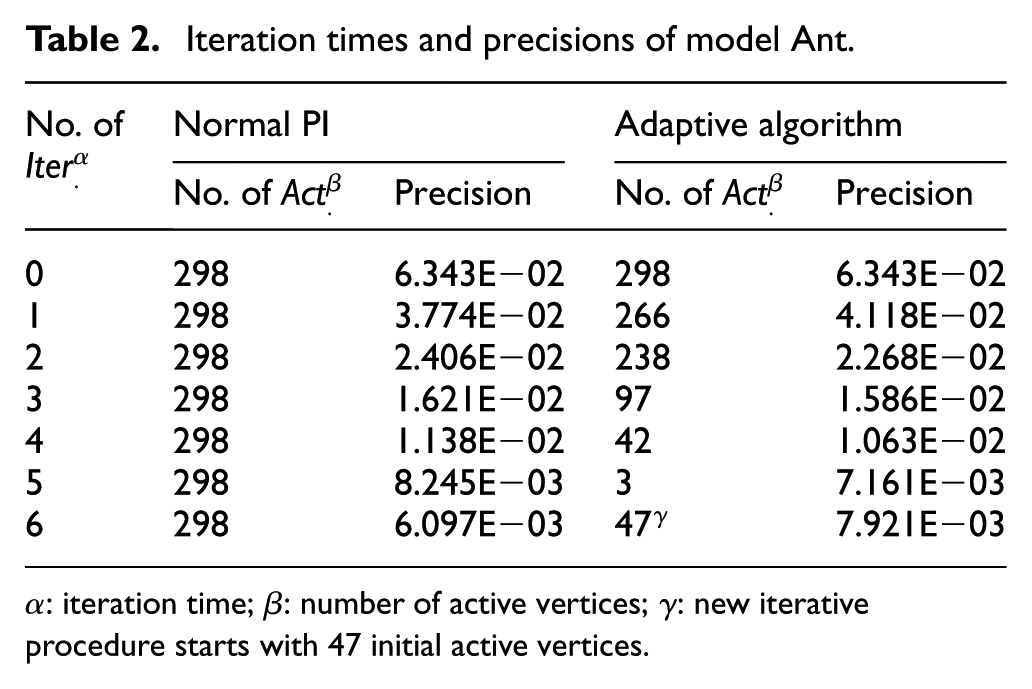
Figure 3 is model Tiger. According to Table 3, normal PI costs 10 iterations to reach the pre-defined fitting precision

Fit model Tiger by the adaptive algorithm, where the initial mesh is displayed in red and the subdivision surface is displayed in yellow: (a) #iter. = 0, #act. = 2697; (b) #iter. = 1, #act. = 2625; and (c) #iter. = 9, #act. = 817.
Iteration times and precisions of model Tiger.

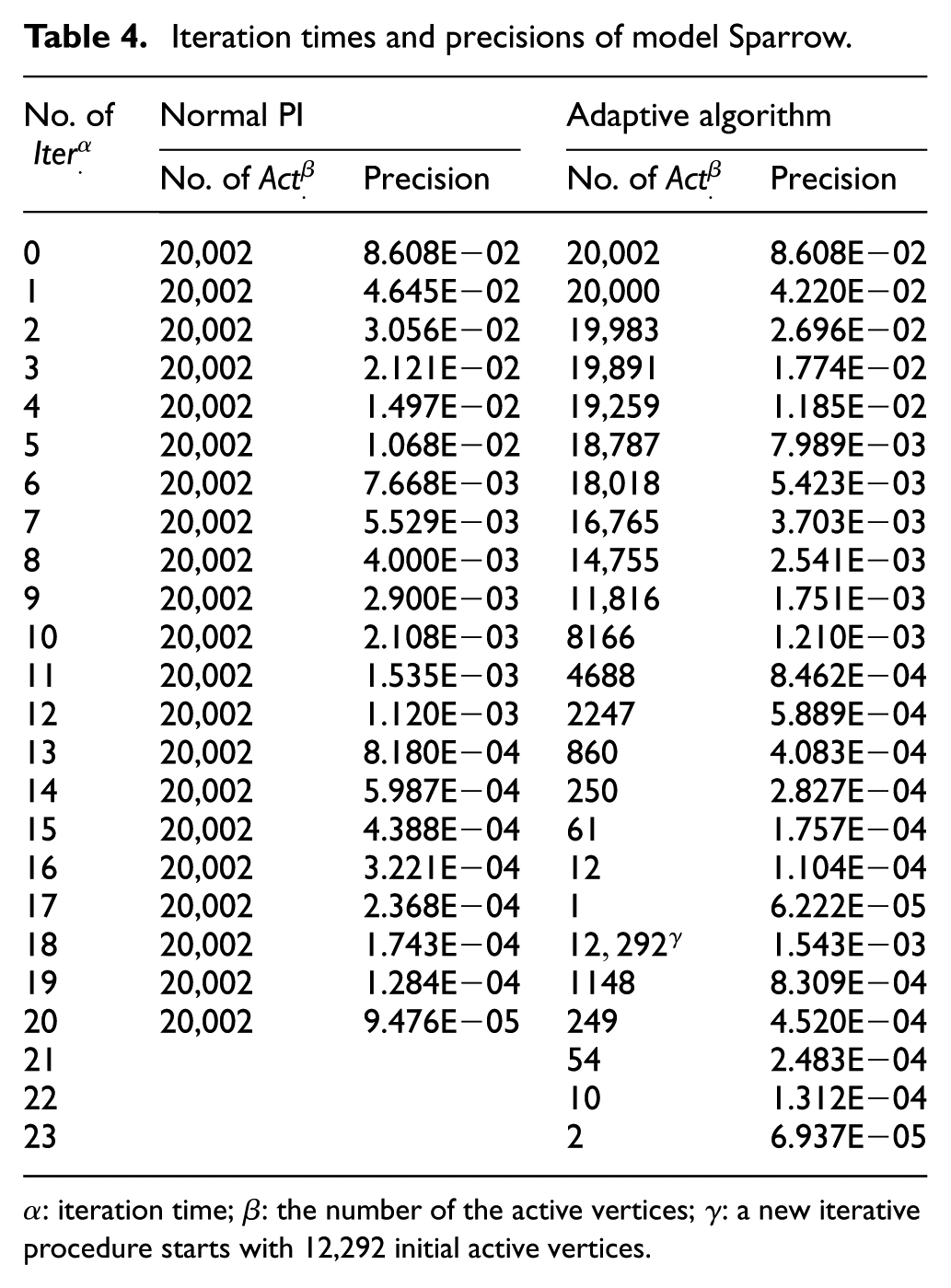
Figure 4 is model Sparrow. Table 4 shows that normal PI costs 20 iterations to reach the pre-defined fitting precision

Fit model Sparrow by the adaptive algorithm, where the initial mesh is displayed in red and the subdivision surface is displayed in yellow: (a) #iter. = 0, #act.= 20,002; (b) #iter. = 1, #act. = 20,000; and (c) #iter. = 19, #act. = 1148.
Iteration times and precisions of model Sparrow.
By comparing the two algorithms (Tables 1–4), the adaptive algorithm is more efficient than the other, costing much less computational units to meet the fitting precision. In general, the adaptive algorithm is especially efficient in fitting large-scale data points, where the fitting precisions of most vertices can reach the pre-defined precision in early iterations, and then the corresponding vertices become fixed. This helps us save a lot of computation.
Algorithm 2: weighted adaptive algorithm for Loop subdivision surface
Table 5 shows the weighted adaptive algorithm of model Tiger, and the given threshold is

Iteration times, precisions, and weights of model Tiger.
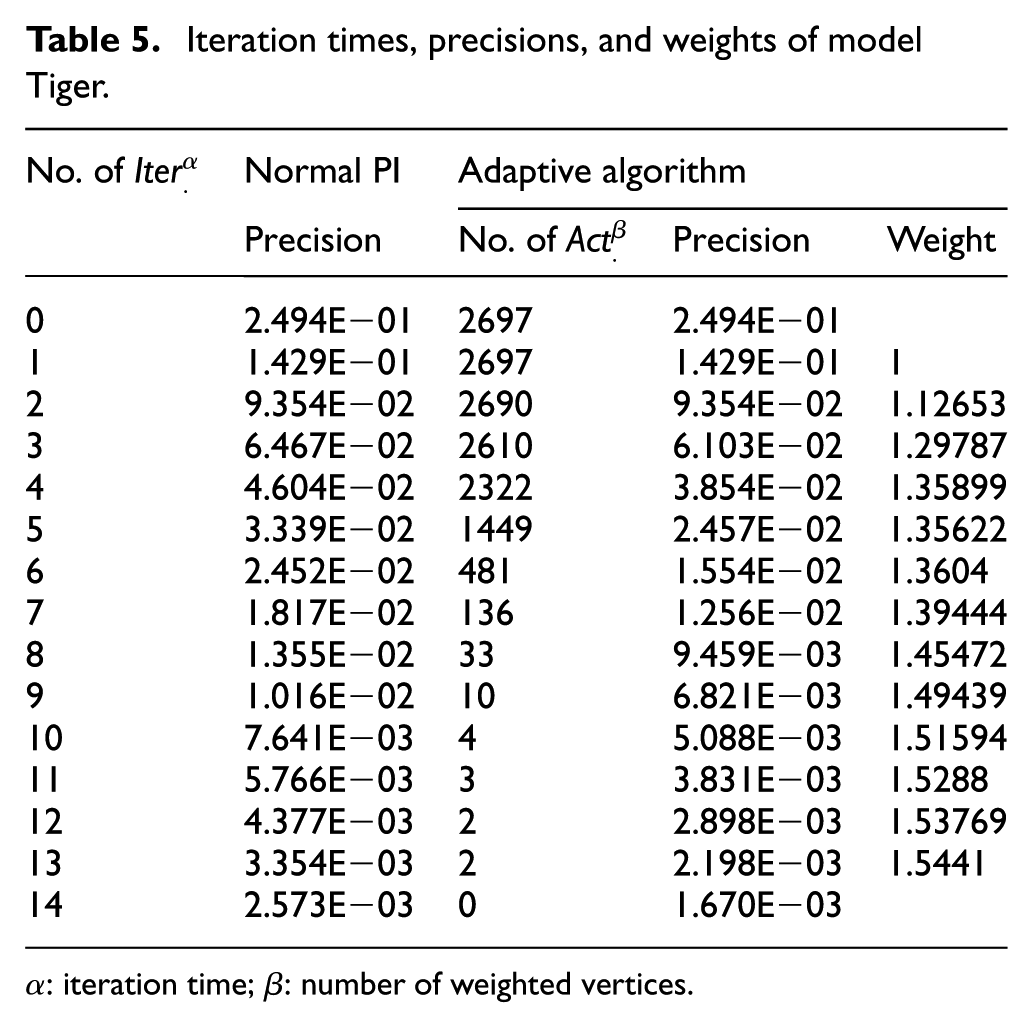
Table 6 shows the weighted adaptive algorithm of model Bishop, and the given threshold is
Iteration times, precisions, and weights of model Bishop.

Tables 5 and 6 show that the number of weighted vertices decreases with the process of iterations, which means the number of vertices that satisfy the acceleration threshold keeps increasing. The convergence rate of weighted algorithm has been accelerated and the convergence accuracy is higher than that of traditional one.
Conclusion
In this article, one adaptive fitting algorithm for progressive interpolation is developed by the local property of progressive interpolation. The vertices are classified into two dynamic sets, namely, the active set and the fixed set. During the process of iteration, the number of active vertices which needs to be adjusted decreases. Therefore, it helps us save a lot of computation. Weighted adaptive algorithm of progressive interpolation for Loop subdivision surface is also given. The weights have been assigned to the vertices in order to make convergence rate meet the given threshold. Plenty of numerical examples and tables show that subdivision surfaces and data fitting can be effectively applied in data aggregation, data compression, and data fusion.
Footnotes
Handling Editor: Songhua Xu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China—Joint Foundation with Guangdong (Key Project) under grant number U1135003 and the National Natural Science Foundation of China under grant numbers 61100126 and 61472466.