
Abstract
This article proposes a fault diagnosis method for closed-loop satellite attitude control systems based on a fuzzy model and parity equation. The fault in a closed-loop system is propagated with the feedback loop, increasing the difficulty of fault diagnosis and isolation. The study uses a Takagi-Sugeno (T-S) fuzzy model and parity equation to diagnose and isolate a fault in a closed-loop satellite attitude control system. A fully decoupled parity equation is designed for the closed-loop satellite attitude control system to generate a residual that is sensitive only to a specific actuator and sensor. A T-S fuzzy model is used to describe the nonlinear closed-loop satellite attitude control system. With the combination of the T-S fuzzy model and fully decoupled parity equation, the fuzzy parity equation (FPE) of the nonlinear system can be obtained. Then this article uses a parameter estimator based on a Kalman filter to identify deviations and scale factor changes from information contained in the residuals generated by the FPE. The actuator and sensor fault detection and isolation simulation of the three-axis stable satellite attitude control system is provided for illustration.
Introduction
The closed-loop satellite attitude control system (CLSACS) is the most critical subsystem guaranteeing the normal operation of a satellite. However, it has a complex structure, a poor working environment, unknown disturbances and uncertain factors. Furthermore, it is one of the most fault-prone subsystems. For satellites in orbit, an attitude control system fault often leads to disaster and is likely to result in satellite roll and attitude loss within a short period, ultimately causing satellite mission failure.1–7 Because the faulty satellite component is irreparable, fault-tolerant control methods for the CLSACS must be investigated, and the operational status of the CLSACS must be effectively monitored. Timely detection of a fault in the CLSACS and the implementation of effective fault-tolerant controls can improve the reliability and security of satellites and also reduce risk. Incorporation of reconfigurable or safety controls can protect the CLSACS from catastrophic accidents as well as enhance the resilience of the system.8,9
Traditional fault diagnosis methods primarily consider open-loop systems, and there are currently no in-depth studies of fault diagnosis for closed-loop systems in the literature. Although Adnane et al. 10 demonstrate a new design version of the extended Kalman filter which is effective and can be utilized as an alternative LEO satellite attitude estimation system, the study did not consider the sensor fault propagation problem in closed-loop systems. Zhou et al. 11 proposed two main reasons for a decline in fault diagnosis performance. First, as the introduction of a feedback system generally makes a system more robust to external disturbances, the impact of the control variable may be overshadowed when a fault is in its early stages or of a smaller amplitude. The residual signal may still be within a range of small fluctuations when a fault occurs, making fault detection difficult and increasing the loss detection rate. Second, feedback control may propagate faults within a system, resulting in abnormal signals. For example, in an open-loop system, a sensor fault occurring in the system will not affect other sensors because the measurement signal is still within the normal range, while in a closed-loop system, with a feedback signal introduced, the use of an abnormal measured value by the feedback controller may cause the control signal to deviate from the normal trend and subsequently cause the entire system to depart from the normal operating range. In this case, the signals measured by other sensors are also abnormal. Overall, fault propagation increases the difficulty of fault isolation. Research and analysis related to closed-loop diagnosis are important aspects of fault-tolerant control for a closed-loop system, which improves the robustness of the system. Yang and Zhang 12 achieved fault detection and isolation for a closed-loop system by constructing a double observer. However, the observer gain matrix design was complex, the computational burden was large, and the fault diagnosis performance was poor. Ruschmann et al. 13 used fuzzy parity equations (FPE) to diagnose the faults of actuators and sensors in flight control systems and estimated the relevant fault parameters, though faults in closed-loop systems were neither estimated nor analysed. Cheng et al. 14 proposed a combined method for detecting and isolating minor actuator faults in closed-loop control systems, yet they did not analyse the propagation of faults in a closed-loop system. Wu and Liu 15 diagnosed the fault in the pitch actuator of wind turbines with the method that combined the interval prediction algorithm with the recursive subspace identification based on the variable forgetting factor algorithm. Because the fault in the pitch actuator will propagate in the closed-loop system, the method cannot diagnose the fault in the closed-system.
This article examines the system time redundancy and principles of fault propagation in closed-loop systems and then establishes a set of fully decoupled parity equations (FDPEs) for fault diagnosis of actuators and sensors.
This study presents a fault diagnosis that incorporates both FDPEs and the Takagi-Sugeno (T-S) model, a method in which the residual is sensitive to a specific fault and is decoupled from system states, disturbance inputs and other faults. The design methods of the FDPEs for the fault control system (actuator faults, sensor faults and multiple faults) is discussed; the fault model is estimated through parameter estimation using residual information; and the simulations of detection, isolation and identification of actuator, sensor and multiple faults are accomplished.
CLSACS dynamics model
The CLSACS is a typical closed-loop control system. A fault in a member of a closed-loop system spreads with the closed-loop feedback, and detection and isolation are difficult to achieve.16,17 In this study, a rigid three-axis stabilized satellite is considered.
The satellite actuator consists of three orthogonal flywheels, and the measuring device is a combination of star sensors and gyros. The three-axis stabilized satellite attitude dynamics equations are as follows 18

where
Assume that the rotational speed of the satellite orbit system with respect to the inertial system is
When the three attitude angles are small, the conversion matrix for converting from the satellite orbit coordinate system to the body axes coordinate system is

Then,

After applying differential calculus to equation (3), we obtain

Without considering other disturbance torques, the space environmental disturbance torques can be expressed as follows when the three attitude angles are small

Substituting equations (4) and (5) into equation (1), we obtain

The controller chosen for the CLSACS is the proportional derivative control. The control torques are

where
The state variable

where
If the state variable of the CLSACS is the same as in equation (8), the CLSACS can be expressed as follows according to equation (6)

where
Suppose that the working point of the CLSACS is

where
The satellite attitude control system (equation (6)) is a nonlinear system, whereas the parity equation is suitable only for linear systems. El-Amrani et al. 19 introduced the T-S model to describe a nonlinear system to improve diagnostic accuracy.
A CLSACS can be expressed as a T-S fuzzy control system constructed such that the three attitude angles
Rule
The global model of the CLSACS state equation can be expressed as

where
Fault propagation analysis of a closed-loop system
To effectively diagnose the faults of a control system, it is necessary to understand the propagation of faults in a closed-loop system and analyse the impact of faults in the system. The approach taken in this study is to first define the discrete equations of the system and then add feedback; faults are then added to the actuators and sensors. Finally, the propagation of the actuator and sensor faults in the closed-loop system is diagnosed.
The discrete equations of the control system are

where
We add a feedback loop to equation (12). Output feedback is a common type of feedback control method. 21 Thus, we consider output feedback as the feedback loop

where
After substituting (13) into (12), we obtain

which is the control system state equation with feedback.
According to Wang and Xiong, 22 the fault models of actuators and sensors are considered as

where
Next, the propagation of actuator and sensor faults in a closed-loop system is analysed based on the closed-loop system model and fault model.
1. Actuator fault propagation
When an actuator is faulty and

By substituting equation (16) into equation (12), the system state equation can be rewritten as

When an actuator is faulty, the form of the fault can be expressed as in equation (17), and the coefficient matrix of the fault is the same as the control matrix of the given instruction.
According to equations (12) and (17), the effect of an actuator fault on the sensor output is expressed as

As noted above, an actuator fault affects both the system state and system measurement output.
2. Sensor fault propagation
When a sensor is faulty and

Due to the existence of the output feedback loop, the fault of a sensor will be propagated with the feedback loop and then affect the instruction input of the control system actuator. The instruction input of the control system can be expressed as

When the control instruction acts on the system state equation and the sensor is faulty, the system state equation is

The above analysis illustrates that a sensor fault can be propagated with the feedback loop, affecting the system input and the system state equation. A sensor fault also affects the output of measurement and disturbs the actuator input, and thus fault isolation is affected. Regarding the actuator input and system state, the coefficient matrix of the fault parameter
Fault diagnosis of an actuator in a closed-loop system
FPE for the fault diagnosis of an actuator
After we establish the FDPE and obtain the residual error generated by the FDPE, the residual state equation can be obtained by using the T-S model, which means the method of FPE. The residual error is estimated by using a Kalman filter based on the equation of the residual. The estimated residual error can be compared with the set threshold to determine whether an actuator is faulty.
The fault model representing the case in which the

where p is the dimension for a given input

At time

Then, the measurement equation at time k is

Let
Equation (25) can be expressed as

where


Based on Song et al.,
23
we construct a fully decoupled parity vector (FDPV), denoted as

where

Consider each row of

Then, we can get
The
The necessary and sufficient condition for the existence of the nonzero

where
The FDPE residual

where
By substituting equation (26) into equation (32), residual

Equation (26) indicates that

Because the designed FDPV is sensitive to the

where
By substituting equation (35) into equation (34), the parity equation residual

The above discussion indicates that

Otherwise, the FDPE residual will always be zero and cannot reflect the fault characteristics. When
By applying the T-S model presented in the section ‘CLSACS dynamics model’, we can express the output of the T-S model as
where
The correspondence between the fault parameters and the residual error is used as the observation equation. Thus, we obtain

where
and
Because the change trend of

where
The actuator fault parameter
The fault parameters are statistically determined, and the fault threshold is
The fault diagnosis of an actuator in a closed-loop system is completed. When multiple actuators are faulty, multiple actuator fault diagnoses and isolations can be achieved. Then, the fault parameters can be estimated after establishing the FDPE for each actuator.
Simulation results and analysis
The actuator fault of a three-axis stabilized CLSACS is simulated. The output feedback loop and controller are designed simultaneously. The controller is replaced with the output feedback loop to ensure the stable operation of the system. The parameters which are provided by the team’s predecessors are shown in Table 1.
Satellite simulation parameters.

When the CLSACS is described, the triangle membership function is chosen for the premise variables. The working point and membership function are selected as shown in Figure 1.

Schematic of the working point selection and membership function of the antecedent variables.
An abrupt fault at the Y-axis actuator is expressed as

After establishing the fully decoupled fuzzy parity equation (FDFPE) for the three-axis actuator of a control system, the fault parameter can be estimated as follows.
Figures 2 and 3 illustrate that when the FDFPE is established for the Z-axis actuator, the fault deviation estimation result is a zero-mean sequence that is affected only by noise. For the Y-axis, the FDFPE is established to estimate the true fault error. Some errors exist in the estimation results before or after the time at which the fault is added; for the remainder of the time, the fault parameter can be estimated accurately. Thus, the FDFPE is effective in the detection and isolation of actuator faults.

Y-axis actuator deviation estimation result.

Z-axis actuator deviation estimation result.
A time-varying fault at the Y-axis actuator is expressed as

In the same manner, after establishing the FDFPE for the three-axis actuator of a control system, the fault parameter can be estimated as follows.
Figures 4 and 5 show that when the actuator fault is time varying, the fault parameter can be accurately estimated after the FDFPE for the system is established. Thus, fault detection and isolation can be completed, and the goal of the actuator fault detection and isolation can be achieved.

Residual of the Y-axis actuator.

Residual of the Z-axis actuator.
To verify the ability of the FDFPE to diagnose the faults of multiple actuators, at 600 s, the abrupt fault shown in equation (41) is added to the X-axis, and the time-varying fault shown in equation (42) is added to the Y-axis. After establishing the FDFPE for the three-axis actuator of the control system, the fault parameters can be estimated as follows.
Figures 6–8 show that when multiple actuators are faulty, the FPEs established for different actuators reflect only the fault characteristics of the corresponding actuator. The fault parameters can be estimated using the residual error information of the parity equation and the Kalman filter. Identification of the fault parameters can result in the detection and isolation of the system fault.

Residual of the X-axis actuator.

Residual of the Y-axis actuator

Residual of the Z-axis actuator.
Fault diagnosis of a sensor in a closed-loop system
FPE for the fault diagnosis of a sensor
When a sensor is faulty, the fault not only will directly affect the measurement results of the sensor but can also propagate through the feedback loop in a closed-loop system, thereby affecting the input of the actuator and system state. The FPE for the fault diagnosis of a sensor is established based on the same method presented in the ‘Fault diagnosis of an actuator in a closed-loop system’ section. A double parity equation diagnosis method is designed based on the propagation characteristics of a sensor fault in a closed-loop system. A set of parity equations is used for fault detection and isolation, and another set is used to estimate the fault parameters.
The fault model representing the case in which the

At time

Hence, the measurement equation at time k is

With the same method in the ‘Fault diagnosis of an actuator in a closed-loop system’ section, the equation (46) is computed as follows

where
Li et al. 21 introduced a method for constructing the FDPEs of a sensor, which works well in open-loop systems. However, because of the existence of the feedback loop, a sensor fault in closed-loop systems can degrade the actuator; as the time redundancy measurement equation is related only to a specific sensor, the sensor fault cannot be obtained.
Some scholars have suggested enhancing the fault information in the residual of the parity equation by optimizing the design of the feedback controller of the closed-loop system. 11 Following their work, the double parity equation diagnosis method is designed based on the propagation characteristics of a sensor fault in a closed-loop system. A set of parity equations is used to detect and isolate the fault, and another set is used to estimate the fault parameters.
1. Parity equations for fault detection and isolation
The FDPV

Equation (47) can ensure that the parity equation is decoupled from the system state, system disturbance and feedback vector
After the FDPVs are constructed, the parity equation residual

By substituting equation (46) into equation (48), we obtain

Based on equation (47), the parity equation residual

In this manner, the residual error
When only the

where
For example, let
Let

Then, the parity equation residual can be expressed as

Considering the effect of noise, the fault parameters are statistically determined, and the fault threshold is
When only one sensor is faulty, after designing multiple FDPVs that are decoupled from each sensor in the aforementioned manner, we can determine that a sensor parity equation residual equal to zero represents a fault. If multiple sensors are faulty, the FDPV can be constructed such that many diagonal elements of
Because
2. Parity equation for fault parameter estimation
If the observation equation for the Kalman filter is constructed based on equation (54), the fault parameter will be an
To reduce the computational burden of the filter estimation, another FDPV, denoted as
The

where
Assume that the sensor fault does not change within a data window.
A new fault parameter vector is composed of the fault parameters of the

where
Considering fault parameter vector
The other elements of

Equation (50) illustrates that the unknown fault parameter changed is
Based on the T-S model presented in the ‘CLSACS dynamics model’ section, we obtain

We can estimate the fault parameter via the optimal estimation method. Assume that measurement noise

where

The dynamic model is set up as a random walk process because the change trend of

where
The method for reducing the dimensions of a sensor’s fault parameters is suitable only when a single sensor is at fault. Equation (56) cannot be obtained when multiple sensors are at fault.
Simulation results and analysis
The first sensor fault in the CLSACS is simulated and verified. The simulation parameters are shown in Table 1.
An abrupt fault at the first sensor is expressed as follows

Based on the time redundancy measurement information, the FPE is established according to equations (54) and (50) to diagnose the sensor fault.
Select simulation results are shown below (a 5-s smoothing window is applied to the residual results).
Figures 9 and 10 illustrate that if the sensor that the residual is decoupled from is the faulty sensor, the residual will be the sequence that is affected only by noise. If the sensor that the residual is decoupled from is not the faulty sensor, the fault will be reflected in the residual.
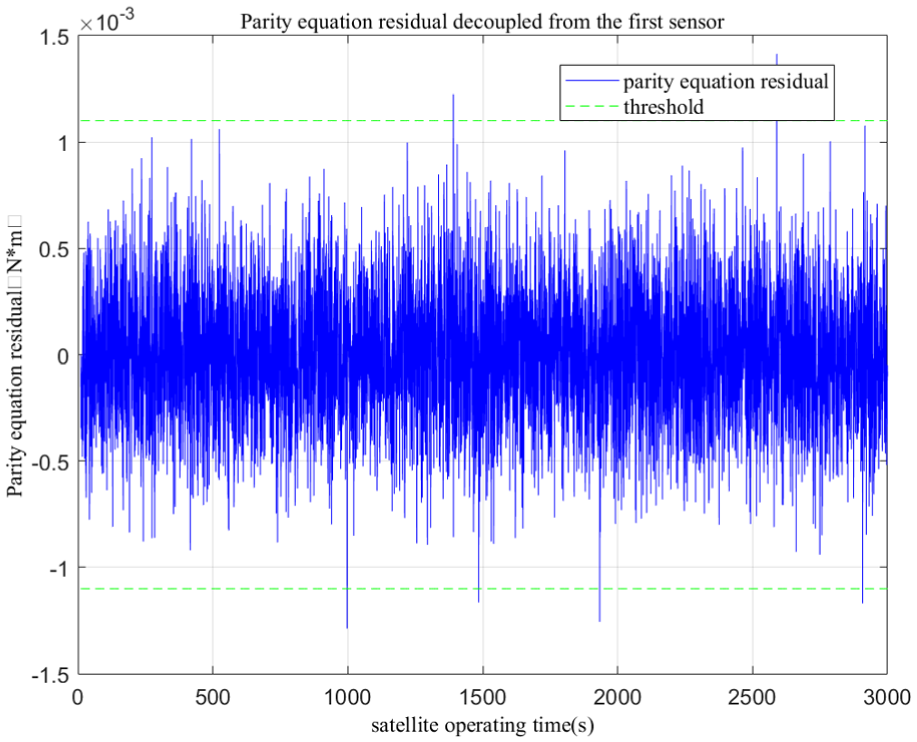
Residual decoupled from the first sensor.

Residual decoupled from the second sensor.
The aforementioned method is used to detect and isolate a sensor fault under the single fault condition. Because the measurements of different sensors and the projections of the measurement results in different FDPV directions are different, the residual form of the parity equation may be different.
After fault detection and isolation, the fault parameters are estimated using equations (54) and (58). The simulation results are shown below.
Figure 11 shows that estimation of the fault parameter can be achieved by designing a reduced-dimension FDPV. Some errors exist in the estimation results before or after the time at which the fault is added, and there is a jump in the residual of the parity equation. The fault parameters can be estimated accurately during the remaining period.

Estimation results for an abrupt fault at the first sensor.
A time-varying fault at the first sensor is expressed as equation (60). The simulation results are shown below

Figures 12 and 13 show that this method can also be used to detect and isolate time-varying faults. When the first sensor is faulty, the residual decoupled from the first sensor is a white-noise sequence. The parity residual that is decoupled from the second normal sensor goes awry because it is affected by the fault.

Residual decoupled from the first sensor.

Residual decoupled from the second sensor.
The estimation results for a time-varying fault are shown in Figure 14.
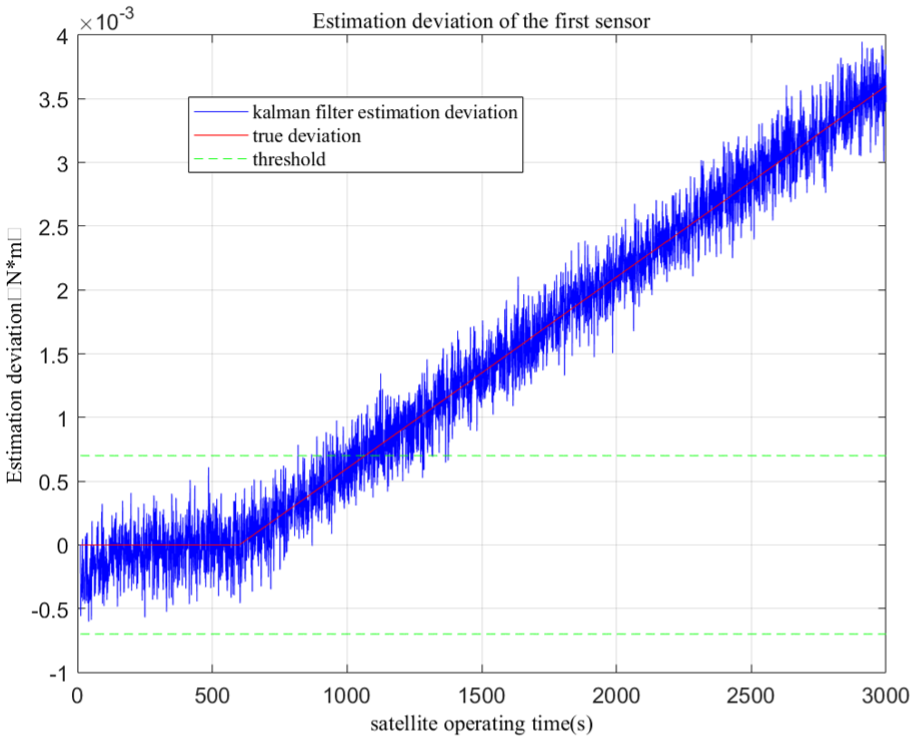
Estimation results for a time-varying fault at the first sensor.
Figure 14 shows that based on the fault isolation, the reduced dimension of the FDPV can be used to estimate the parameter of a time-varying fault.
To verify the fault diagnosis of the decoupled FDPV for multiple sensors, the results for the case in which a fault is added at the first sensor are shown in equation (60); those for the case in which a fault is added at the third sensor are shown in equation (61). The simulation results are shown in Figures 15 and 16.

Decoupling vectors for the first and third sensors.

Decoupling vectors for the second and fourth sensors.
Figures 15 and 16 show that when multiple sensors are faulty, the parity residual result of the zero-mean white noise can be obtained only by designing the FDPV for two faulty sensors; otherwise, the fault information will be reflected in the residual. Thus, fault diagnosis and isolation of multiple sensors are achieved. In addition, the projection in the direction of the FDPV is different for different sensor faults. The residual shown in Figure 16 indicates that the projection in the direction of the residual of the abrupt sensor fault is more obvious.
Conclusion
This article introduces a fault diagnosis method for the actuators and sensors in a closed-loop control system. Closed-loop control system equations and fault modes are presented. An actuator fault can affect both the system measurement output and system state. The fault will be propagated with the feedback loop, which will affect the system input and the system state equation. Sensor faults affect the system measurement output while disturbing the actuator input, which impacts fault isolation.
The residual generated by the FPE is sensitive only to a specific actuator and is decoupled from the system state and other actuators. The residual is obtained by establishing the FPE for each actuator, and then the fault model parameters can be estimated. In this manner, the fault detection and isolation of actuators in a closed-loop system are achieved. A double parity equation diagnosis method for sensor faults in a closed-loop system is used to detect and isolate sensor faults and to achieve fault parameter estimation that allows the single and multiple fault diagnosis isolation of sensors in a closed-loop nonlinear system.
Footnotes
Handling Editor: Amiya Nayak
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No. 61573059).