
Abstract
The emergence of sensor-cloud system has completely changed the one-to-one service mode of traditional wireless sensor networks, and it greatly expands the application field of wireless sensor networks. As the high delay of large-scale data processing tasks in sensor-cloud, a sensor-cloud data acquisition scheme based on fog computing and adaptive block compressive sensing is proposed. First, the sensor-cloud framework based on fog computing is constructed, and the fog computing layer includes many wireless mobile nodes, which helps to realize the implementation of information transfer management between lower wireless sensor networks layer and upper cloud computing layer. Second, in order to further reduce network traffic and improve data processing efficiency, an adaptive block compressed sensing data acquisition strategy is proposed in the lower wireless sensor networks layer. By dynamically adjusting the size of the network block and building block measurement matrix, the implementation of sensor compressed sensing data acquisition is achieved; in order to further balance the lower wireless sensor networks’ node energy consumption, reduce the time delay of data processing task in fog computing layer, the mobile node data acquisition path planning strategy and multi-mobile nodes collaborative computing system are proposed. Through the introduction of the fitness value constraint transformation processing technique and parallel discrete elastic collision optimization algorithm, the efficient processing of the fog computing layer data is realized. Finally, the simulation results show that the sensor-cloud data acquisition scheme can effectively achieve large-scale sensor data efficient processing. Moreover, compared with cloud computing, the network traffic is reduced by 20% and network task delay is reduced by 12.8%–20.1%.
Keywords
Introduction
Wireless sensor networks (WSNs) are widely used in the fields of environment detection, forest fire early warning, and military defense for providing various information effectively and monitoring1–5 the state of the target in real time. However, the limited computing storage capacity, single service mode, and serious waste of resources have become the bottleneck problem of the further development of WSNs. 6
The concept of “cloud computing” first appeared in the 2006 search engine conference and was clearly defined as three modes of service: platform as a service, software as a service, and infrastructure as a service. 7 The powerful computing and storage capability of cloud computing platform and the characteristics of openness, flexibility, and sharing provide a new research idea for the development of traditional WSNs. 8 The integration of cloud computing and WSNs has created a new service mode: sensor is a service, 6 which completely changed “one to one” service mode of traditional WSNs, 9 and the concept of sensor-cloud came into being. Studies of Tan 10 and others have found that sensor-cloud, which was a product of organic fusion between WSNs and cloud platform, could provide remote monitoring cloud services, and multiple users could share the same WSNs resources. Yuriyama and Kushida, 11 Madria et al., 12 and others used WSN sensor nodes as virtual nodes of cloud service platform and provided automatic response service to users. In brief, the powerful data processing and storage capabilities of the cloud computing platform provide technical support for WSNs large data analysis, and sensor-cloud can provide users with an unparalleled interaction with the physical world. At present, Xively, 13 Nimbits, 14 YeeLink, 15 and other sensing cloud systems have appeared successively and showed outstanding advantages in data storage management. However, the cloud service platform is so far away from WSNs that the network communication bandwidth and data transmission delay are large. And, with the expanding scale of WSNs, node data that to be processed present an explosive growth. If these data are directly transmitted to the cloud service platform, it will be a great challenge to WSNs’ communication capability and energy consumption. In order to effectively solve the problem, the concept of fog computing 16 is proposed, in which the operation strategy is on the interactive boundary between the physical world and the cloud service platform, using a device with certain computing storage capacity to preprocess the data to play the role of connecting the real world and the cloud network. It is generally recognized that the fog computing model will bring profound changes to cloud computing. Bonomi et al. 17 analyzed the defining features of fog computing and discussed its application and main problems, but did not give specific implementation strategy of system function. Sarkar and Misra 18 and others analyzed the fog calculation model in theory and researched the application in energy consumption and delay performance, but they focused on the fog computing layer itself, without analyzing the performance index of the whole system. Zhu et al. 19 and others deeply analyzed the fog computing data access and interaction mechanism; Zao et al. 20 and Yi 21 discussed the application of fog computing in smart wearable devices and medical data management, respectively. Most of the researches focus on model analysis, and there is not much attention to the fusion technology of fog computing and sensor-cloud system. In the work of Shojafar and colleagues,21–23 a number of studies have explored new fast-converge solutions to response delay of query per fog node for the fog-supported WSN. In the long term, sensor-cloud system based on fog computing can better manage sensor nodes, and the performance of network communication bandwidth, delay, and fault tolerance management will be greatly improved.
Data acquisition is one of the most important and the most critical application functions of WSNs. 21 With the maturity of compressive sensing (CS) 24 and mobile agent (MA) 25 technology, the efficiency of WSNs data acquisition is improved. How to design more stable and efficient CS and MA strategy is still a research hotspot in WSN data acquisition research.26,27 Because of the relatively few research achievements on cloud and fog computing technology at home and abroad, especially the research on sensing cloud based on fog computing is still in its infancy. With cloud sensing large-scale data acquisition as the application background, a sensor-cloud data acquisition scheme based on fog computation and adaptive block compressed sensing is proposed in this article, the work and innovation are as follows:
Build a network framework of sensor-cloud system based on fog computing and give the specific definition of each level and the coordinated operation strategy between different levels.
Study the key technologies of adaptive block compression sensing data acquisition strategy, mobile node data acquisition path planning, and multiple mobile node collaboration computer system. The elastic collision optimization (ECO) algorithm is put forward and the specific implementation process of the above key technologies is given.
The sensor-cloud data acquisition scheme based on fog computing is simulated. The total amount of network data communication, system task delay, and network energy consumption are demonstrated, and corresponding conclusions are given.
Sensor-cloud framework based on fog computing
Sensor-cloud module constitute based on fog computing
Building a sensor-cloud framework based on fog computing: the system based on cloud computing provides data mining analysis services for large-scale sensor node data transmitted to the cloud and provides decision-making strategy for different users. The network computing is extended from the cloud center to the network boundary by the fog computing, and the virtual network is formed by the mobile node with certain computing power, which is independent or assisting the cloud to complete the tasks of data processing, storage, management, and so on. Figure 1 shows the sensor-cloud framework diagram based on fog computing.
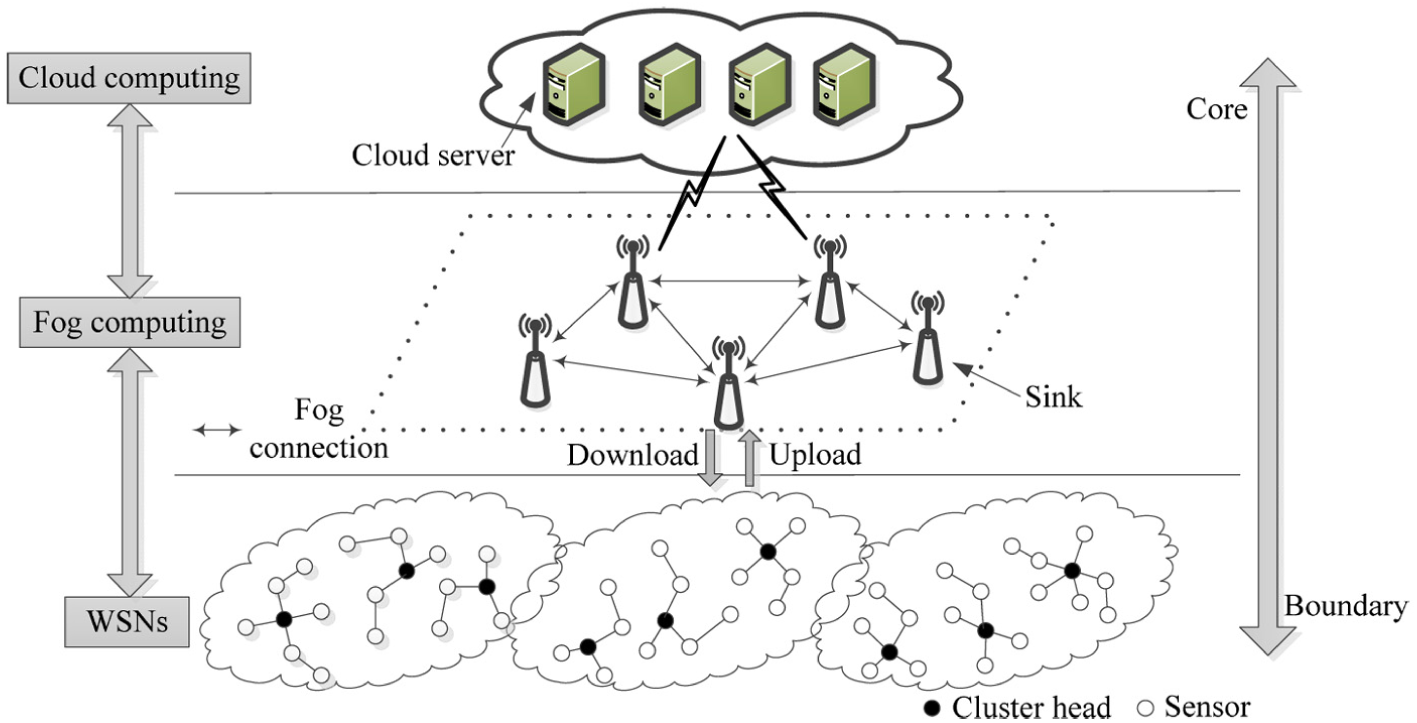
The sensor-cloud framework diagram based on fog computing.
Sensor-cloud framework based on fog computing is composed mainly of three layers (module): cloud computing layer, fog computing layer, and WSN layer:
Cloud computing layer: top of the framework, mainly composed of high-performance servers, has powerful computing and storage capability. It can analyze data mining for large data stored in the cloud and provide openness, flexible, and heterogeneous service platform for different users. With the continuous development of cloud computing technology, users only need to obtain the relevant privileges of the sensing cloud platform for rich resources and applications without having to hold WSN devices and not to worry about the docking of equipment interfaces.
WSN layer: it consists of a large number of sensor nodes with low cost, wireless communication, and computing power. These sensor nodes can be isomorphic or heterogeneous, or can be arranged in large scale or in multiple WSN deployments. The sensor nodes can be divided into different virtual clusters 28 using virtualization technology to supervise the target area without knowing the actual location of the sensor nodes.
Fog computing layer: it is composed of a certain number of mobile nodes. Nodes can communicate with each other, mainly complete those high tasks including the WSN layer of the bridged lower layer and the upper cloud computing, the coordination of mobile nodes, the processing priority, and the real-time performance. On one hand, the distance between the cloud center and the WSNs is so far that the cloud computing cannot work well for higher delay requirement. While the mobile node in the fog computing layer has the strong computing and storage capability, and the high real-time computing processing task can be placed in the fog computing layer. In particular, the fog computing layer can process high priority data in a very short time for scenarios such as dangerous cargo leakage monitoring. On the other hand, the data that the lower WSNs need to transmit is massive, which requires a lot of bandwidth and energy consumption. The fog computing layer can allocate the data in the mobile node virtual network to improve the total network transmission and reduce the task delay.
Collaborative work of sensor-cloud framework module
The different layers of sensor-cloud use their own characteristics to achieve data acquisition, processing analysis, and decision response. The WSN layer is at the bottom of the system, which mainly completes data acquisition. When WSN in the monitoring area completes data acquisition according to the system instruction, then the data are uploaded to the fog computing layer. Data are preprocessed by fog computing layer, according to data size and task priority. Finally, the preprocessed data are transferred to the cloud computing layer for deep data processing analysis.
Taking acidity and alkalinity of soil as an example, the course of sensor-cloud data acquisition based on fog computing is described as follows. Large-scale sensor nodes (Sensor) and a certain number of mobile nodes (Sink) are arranged in a wide range of saline alkali areas. The cloud divides the actual deployment of WSNs into different virtual clusters (Zone), which are responsible for monitoring different target areas. At one moment, the user sends a monitoring request to the specific area and sends the instructions to the cloud through the user side. The cloud computing center sends out the data acquisition instruction to determine the data acquisition Sink node. The fog computing layer uses Sink node to collect and process the sensor node data in the area of the user requested. The preprocessed data are uploaded to the cloud; finally, the results are returned to the user side after data processing analysis. Figure 2 shows the process flow diagram.

Data acquisition process flow diagram of soil acidity and alkalinity monitoring.
Nowadays, with the continuous development of cloud computing technology, how to effectively reduce the total amount of WSN data acquisition and effectively reduce the delay are the key to determine the performance of the sensor-cloud system. The total amount of communication in the whole system is determined by the WSN data acquisition capacity, and the whole communication delay is determined by the cloud computing layer, the fog computing layer, and the WSN layer. Therefore, in order to reduce the total amount of communication, reduce the requirements of communication broadband, and improve the performance of the system communication delay, this article proposes an adaptive block compressed sensing data acquisition strategy in the WSN layer, which only needs to collect a small amount of node data to monitor. In addition, the mobile node data acquisition path planning strategy and multi-mobile nodes collaborative computer system are also proposed in the fog computing layer. The Sink node collects the sensor data according to the optimal mobile planning path and transfers the collected data to all the mobile Sink (MS) range of the fog layer.
Construction of function module model of sensor-cloud system
Adaptive block compressed sensing
The proposed theory of adaptive block compressed sensing brings new ideas for signal acquisition and processing. The lower WSN layer is directly facing the physical world. It is of great significance to set up a reasonable and scientific data perception acquisition method to reduce the total amount of data communication in the system. Therefore, adaptive block compression sensing technology is introduced in the lower layer of WSN layer. It can realize the accurate perception of high-dimensional signals using a small amount of observation data in low-dimensional space.
29
If the N-dimensional signal

In the CS theory, when

For the WSN

where
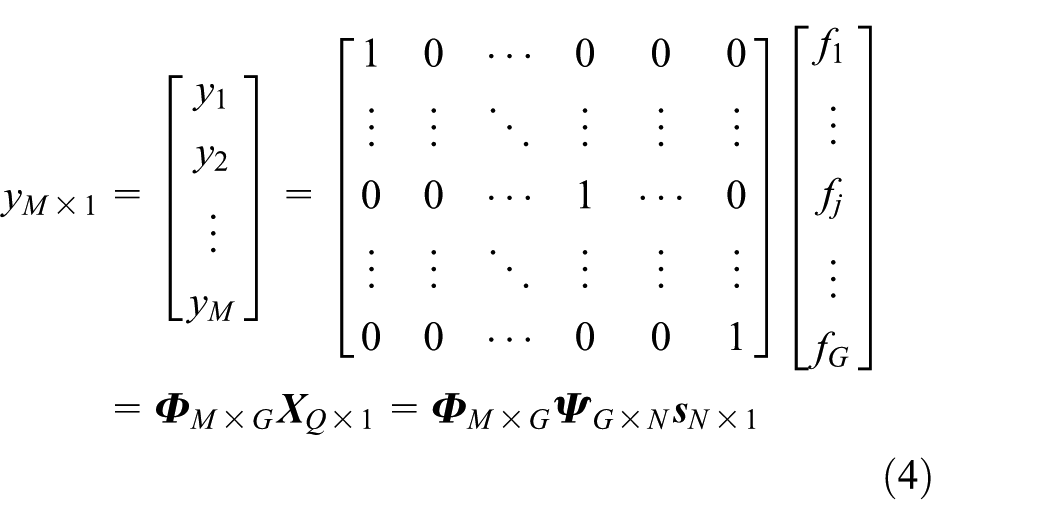
In general, at the same time, N events only generate a small number of events
Block compressed sensing
Although the use of compressed sensing technology in the WSN layer greatly reduces the amount of data acquisition, it still takes a certain amount of time to data communication using the mobile node of the fog computing layer to carry out the data acquisition of the lower nodes one by one, resulting in the data delay. In addition, cloud computing layer (or fog computing layer) can ensure the uniformity of the distribution of work nodes by reasonably scheduling the working state of the node. The

Obviously, each block has
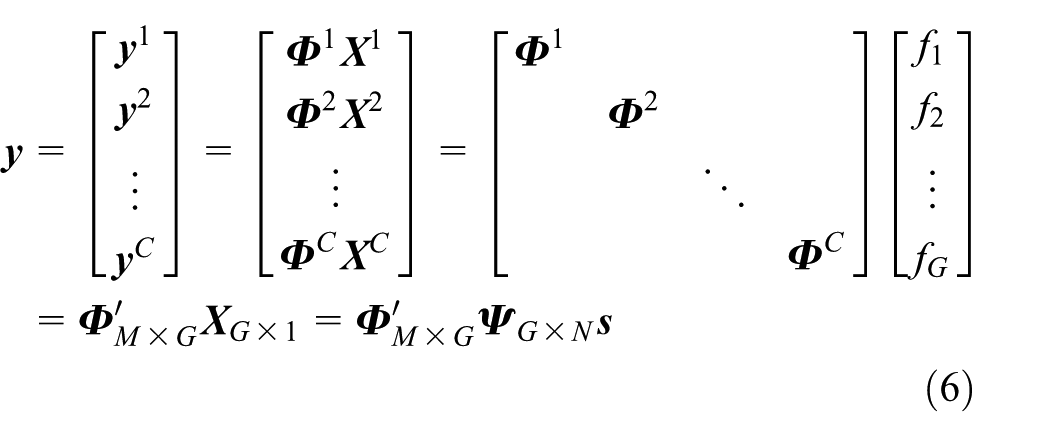
From formula (6), we can see that
Energy consumption analysis of block compressed sensing
The larger the number of block C, the greater the number of intra-block communication; the smaller the number of block C, the greater the number of inter-block communication. As a result, it is necessary to reasonably determine the number of C to balance intra-block and inter-block communication.
Conclusion 1
When the number of block C adopts the following value, the communication efficiency between blocks can be maximized

Among them,
From conclusion 1, it is known that the number of block C is closely related to the network node density. When the network node density
Block compressed sensing measurement of M lower limit and signal reconstruction
The sufficient but not necessary condition of K-degree sparse signal

For the (6) block compressed sensing model, the observation matrix

Simultaneous formulas (8) and (9) give

Therefore, it can be concluded that the observational times M should be satisfied

For the accurate reconstruction of sparse signal
Multi-mobile-node cooperative computing in fog computing layer
Facing large-scale data collected at low level, multiple mobile nodes collaborative computing technology is introduced into fog computing layer in order to reduce communication delay. As shown in Figure 3(b), the fog computing layer is composed of U MS
For
For
Refresh
End for;
End for.

A schematic diagram of cooperative calculation of block communication and fog computing layer: (a) energy consumption analysis of block compression and (b) collaborative calculation of fog computing layer.
When the communication delay between nodes is updated, the collected data will be allocated to other nodes to complete data processing and transmission cooperatively. WSN data acquisition may be taken from any

Formula (12) shows that

where

The size of data processing task H is closely related to the data collection of low-level WSNs. According to the theory of compressed sensing, only
Constraint processing
Intelligent optimization technology is an effective method to solve the problem of objective optimization. However, the particle objective function value cannot be simply equivalent to the particle fitness value; as a result, it is necessary to be constrained to process the particle target function value. Formula (12) contains U inequality constraint

where

For particle

The objective function value



Among them,
After constrained processing of population particles, the individuals with good fitness are selected to continue to evolve when the constraints conditions are satisfied. It improves the efficiency and accuracy of algorithm for solving constrained optimization problems. 33
Mobile node data acquisition path planning strategy
The traditional WSN transfers the node data to the Sink node in wireless multi-hop mode, but the biggest problem of this communication mode is that it can easily lead to the energy hole phenomenon, and the network communication delay is large. In the sensor-cloud system based on fog computing system, the fog computing layer composed of a certain number of MS can collect WSNs conveniently and quickly, and multiple MSs can collect the
Data acquisition time length
The fog computing layer sends B MS to collect data. For the mth

The total time consumed by

Among them,

When B

Energy consumption equilibrium degree of data acquisition
The network energy consumption is an important evaluation index of the lower WSNs. In the process of data acquisition, MS should balance the energy of the block center in the path to achieve the maximum extension of the network life. When

It can be concluded from formula (25) that the smaller the

It can be seen from formula (26) that the evaluation function is used to optimize the time length and energy consumption equilibrium degree of the network, and to reduce data acquisition time length as much as possible to ensure that the energy consumption of each node is more balanced. In addition, the essence of the
Realization of functional module of sensor-cloud system based on ECO
ECO algorithm
Scholars have proposed a series of intelligent optimization algorithms which have been widely used in all fields of production and life by simulating the evolution of species survival. 35 But premature convergence and low convergence efficiency are still the key problems to be solved in the current intelligent optimization algorithm. A large number of studies have shown that effectively maintaining the diversity of population samples is the key factor to improve the global optimization ability of intelligent optimization algorithm. In this article, a new intelligent optimization algorithm, ECO algorithm, is proposed by simulating three kinds of complete elastic collision (CE), complete inelastic collision (CI) and non-complete elastic collision (NCE).
Collision update
The two different particles

In the same way, for CI, there is

For NCE, there is

It can be seen from the collision updating formula that
Step 1. Initialization: for n-dimensional optimization, the initial population
Step 2. Particle evolution update: the update mechanism for particle

Among them,
Step 3. Termination condition determination: if the algorithm satisfies the termination condition, the optimal solution is output, otherwise it will go to “Step 2.”
ECO computational complexity
The computation complexity of ECO algorithm is
Markov chain theory and other related theories can prove that ECO can converge to the global optimal solution with probability “1,” so it has global convergence. The ECO algorithm only involves three parameters of

Conclusion 2
ECO can effectively maintain group diversity.
Proof:

Set


Coupling equations (32)–(34) gives

Among them,
Realization of functional module of sensor-cloud system based on ECO
The sensor-cloud data acquisition based on fog computing mainly involves three functional modules, namely, adaptive block compressed sensing, fog computing layer multi-mobile-node collaborative computing, and mobile node data acquisition path planning. Fog computing layer multi-mobile-node collaborative computing is a continuous optimization problem. And, ECO can be used to solve the fitness value function; thus, the optimal multi-mobile node data cooperative processing scheme is obtained. For the other two discrete optimization problems, we need to discretize the ECO. In addition, sparse data compression reconfiguration, multi-mobile node collaborative computing, and mobile node data acquisition path planning are implemented by the upper sensor-cloud system which provides the possibility of parallel computing, thus greatly improving the computational efficiency of the intelligent optimization algorithm.
Discrete elastic collision optimization algorithm implementation
A discrete elastic collision optimization algorithm (DECO) is proposed for discrete optimization problems. Each particle
Define particle coded switching operation

where

Schematic diagram of coded switching operation and particle transformation operation.
After defining the particle transformation operation, the DECO update strategy is given as follows
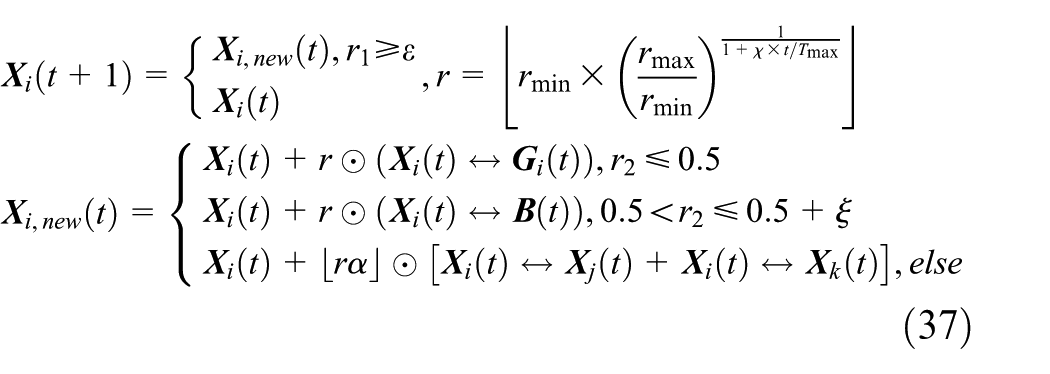
where
Reconstruction implementation of adaptive block compressed sensing sparse signal
First, the particle is coded according to

Flowchart of sensor-cloud system function module: (a) adaptive block compression sensing sparse signal reconstruction, (b) multi-mobile node collaborative computing implementation, and (c) mobile node data acquisition path planning.
Implementation of multi-mobile nodes collaborative computing system
It is assumed that there are z mobile nodes in a fog computing layer that need to transfer data to the upper sensor-cloud, and the ECO algorithm is used to solve the problem. The optimization target is selected as the fitness value function shown in formula (17), that is

The particle

where the ith row data
Implementation of the mobile node data acquisition path planning strategy
The essence of the mobile node data acquisition path planning strategy is the multiple TSP. DECO is used to solve the problem. According to formula (26), the objective function is set as follows

Among them,

From formula (41), we can conclude that the particle coding can make the
Experimental simulation
Build a sensor-cloud architecture based on fog computing. The lower layer WSN is simulated on the NS2 platform, and
Experimental simulation of adaptive block compression sensing
In the face of a user’s monitoring request, the upper sensor-cloud system selects certain nodes in the working state according to the energy consumption and network coverage requirements of the lower WSN nodes and then obtains the network working node density
Contrast experiment of compressed sensing reconstruction algorithm based on DECO
In order to further analyze the performance of compressed sensing reconfiguration algorithm based on DECO, the signal values of
Among them,

Comparison of three reconstruction algorithms for sparse signal reconstruction.

Comparison of three reconfiguration algorithms RE under different K and M.
Comparison results of different evaluation indicators

DECO: discrete elastic collision optimization algorithm.
As can be seen from Figure 6, for sparse signal reconstruction under
Contrast experiment of adaptive block compressed sensing data acquisition
In order to further analyze the performance of the lower layer WSNs adaptive block compressed sensing data acquisition, the DGSP data acquisition algorithm proposed by Tian 36 and the classical CDG data acquisition algorithm are compared. In the process of the experiment, three schemes are set to use the fixed Sink node to collect data, in which the DGSP algorithm is also based on the compression perception theory, but the data tree is used to carry out data transmission. Figure 8 shows the comparison between M and network energy consumption under different reconstruction error requirements.

The comparison between M and network energy consumption under different reconstruction error requirements.
This shows that, on the premise of satisfying the reconstruction accuracy, the proposed scheme only needs to collect a small amount of work node data to achieve accurate monitoring, thus effectively reducing the network data communication. Compared with the other two schemes, the data acquisition amount is reduced by about 20%. CDG needs to improve the reconstruction precision by repeated acquisition of data. With the continuous reduction of the system’s demand for reconfiguration error, the energy consumption of the network also decreases, but it is still far higher than this and DGSP. Especially, although in the same system reconstruction error, and in the same number of nodes M, the energy consumption requirement of this method is less than DGSP. This can be proved by the fact is the introduction of adaptive block strategy makes more node data only need to be transferred within the block, resulting in more balanced network nodes. For the DGSP algorithm, every node needs data transmission in the form of data tree, which increases the energy consumption of the local nodes and increases the energy consumption of the network. The experimental result shows that the adaptive block compressed sensing data acquisition mechanism can effectively reduce the amount of data acquisition, and the energy consumption of network nodes is more balanced and the lifetime of the network is longer.
Simulation experiment of multiple mobile nodes cooperative computing in fog computing layer
It is assumed that only one mobile node data in fog computing layer need load balancing allocation, and ECO is compared with Greedy-LB (greedy load balancing algorithm), WRR (weighted rotation method), and CPSO-LB algorithm proposed by the literature, 37 respectively. The evaluation index is set to the data coordination computation delay, that is, the load balancing time of the data in the fog computing layer. Figure 9 shows the comparison results of three load balancing algorithms. Figure 10 shows the comparison result between ECO algorithm and genetic algorithm (GA), 21 quantum particle swarm optimization algorithm (QPSO) 35 objective function convergence curve. Figure 11 shows the effect of the number of mobile nodes on data co-computing delay.

Comparison of data processing time delay between three load balancing algorithms.

The convergence curve of three algorithm target functions.

Influence of mobile node number on data co-computing delay.
As can be seen from Figure 9, as the amount of task processing is increasing, the time delay of the four algorithms is increasing, but ECO is better than the other three algorithms, especially when the data processing quantity is larger (20 GB), the time delay advantage of ECO data cooperative computing is more obvious, about 50.1% ∼ 77.6%. As can be seen from Figure 10, the ECO algorithm has faster convergence speed and higher accuracy. It only needs iteration 204 times to find the global optimal solution, which is faster than QPSO and GA algorithm. As can be seen from Figure 11, when the amount of data processing is small, the number of mobile nodes in the fog computing layer has little effect on the time delay of data co-computing, but if the amount of data processing increases gradually, the more number of mobile nodes, the smaller time delay of data cooperative computing. The above experiments show that, for large data processing task, ECO can give a better load balancing scheme and increasing the number of mobile nodes can effectively reduce the time delay of data collaborative computing.
In the fog computing layer, the mobile node can respond to the data acquisition results quickly because of its ability of data processing. 38 In order to further analyze the data processing capability of fog computing layer, the sensor-cloud system contained only one mobile node and no fog computing layer and cloud network proposed by Li and Wang 37 are compared and analyzed. The evaluation index is data processing time delay, and the comparison results are given in Figure 12.

Time delay comparison of data processing in different systems.
As can be seen from Figure 12, when the amount of data is very small, the data delay of a single mobile node system is smaller than the other three systems. Because there is no data co allocation time, and only a small amount of data is processed in the fog computing layer, there is no need to pass it to the cloud. With the increasing amount of data processing tasks, and CPSO-LB algorithm proposed in Li and Wang 37 system data processing delay is better than the other two systems. Because the cloud system without fog computing layer is far from the lower WSNs, resulting in a large delay in data communication. Under the same amount of task, the data processing delay of the system is better than that of CPSO-LB algorithm, which reduces by about 12.8%, compared with the simple cloud system, which reduces about 20.1%. However, when the task processing volume reaches a certain scale, the data processing time delay of this article and CPSO-LB algorithm is higher than the pure cloud system. Because the large amount of data has exceeded the fog computing layer processing capacity and takes more time to deal with the data. The cloud is able to complete the large-scale data processing in a short time with the powerful computing power. The experimental results show that when the data processing task is within a reasonable range, the fog computing layer can effectively lower the data processing delay.
Mobile node data acquisition path planning
In order to analyze the effectiveness of DECO to solve the path planning problem of mobile node data acquisition, the discrete particle swarm optimization (DPSO)
27
and the GA proposed in the literature
21
are compared. The experimental content selects the classic TSP single traveler path optimization centralized eil151, ch150 and the number of mobile nodes 2 and the data acquisition path planning of multiple mobile nodes in
Comparison of evaluation indexes of three algorithms.

DECO: discrete elastic collision optimization algorithm; DPSO: discrete particle swarm optimization; GA: genetic algorithm.
It can be seen from Table 2 that DECO is better than the other two algorithms in solving the accuracy, and the path planning distance is shorter and the algorithm efficiency is better. After introducing parallel computing technology, multiple populations will perform DECO evolution operation at the same time, so that the efficiency is higher and the accuracy is better. This also shows that DECO can solve the traveling salesman path planning problem well.
When the divided block number of lower WSNs is c = 16, the fog computing layer sends 1 and 2 mobile nodes to collect the underlying WSN network data, respectively. Figure 13 shows the path planning results of mobile nodes with different node moving speed. Figure 14 shows the time delay comparison results of mobile nodes with different node moving speeds.

The mobile nodes path planning results with different node moving speeds.

The time delay comparison results of mobile nodes with different node moving speeds.
As can be seen from Figure 13, for different node moving speed, path planning results are different, which indicate that the speed of mobile nodes has an important impact on the delay. As can be seen from Figure 14, with the increasing speed of mobile nodes, the delay of data acquisition decreases gradually, whether it is a single mobile node or a dual mobile node. However, mobile nodes data acquisition is not suitable for places with high real-time requirements.
In order to further analyze the influence of mobile node data acquisition on the energy consumption of the system, respectively set up a system that does not include mobile nodes (using adaptive block compressed sensing for data acquisition), a system containing only one mobile node, a system containing two mobile nodes (using adaptive block compressed perception for data acquisition), and the general data acquisition system (without mobile node and adaptive block compressed sensing strategy) are compared. The comparison results are given in Figure 15.
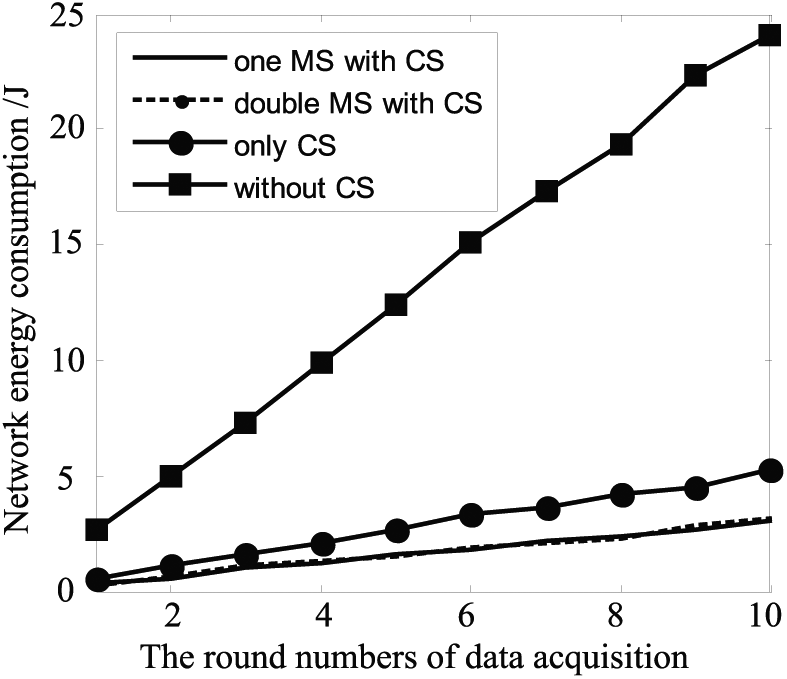
Comparison of energy consumption of different data collection.
From Figure 15, it can be seen that the introduction of mobile nodes and adaptive block compressed perception can greatly reduce the energy consumption of the network, and the energy consumption of the general data acquisition system is far greater than the other three systems. Because mobile nodes are used for data acquisition, there is no data communication between the nodes of the block center, and the path planning uses the energy consumption balance degree of the network node as the optimization objective, thereby effectively reducing the energy consumption of the network. The experimental results show that the use of mobile nodes for data acquisition can reduce the network energy consumption and prolong the network survival time when the time delay is low.
Analysis of simulation results of sensor-cloud data acquisition based on fog computing
Combined fog computing and adaptive block compressed sensing sensor-cloud can effectively achieve data acquisition. The introduction of adaptive block compressed sensing enables the effective monitoring of the target area with only a small amount of observation node data, which greatly reduces the network traffic. The load balancing allocation strategy of mobile nodes is processed by collaborative computing among mobile nodes, which significantly improves the time delay characteristics of the system. The simulation results show that compared with the simple sensing cloud system, the network traffic is reduced by about 20% and the network task delay is reduced by 12.8%–20.1%.
The application of fog computing layer has strong performance advantages. In the range of reasonable data tasks, the fog computing layer has strong data processing capability, the data delay is small, and it can respond to unexpected situations quickly. The data acquisition path planning of multiple mobile nodes is more suitable for the application of periodic data acquisition and analysis. The simulation experiment also proves that it is of great significance to the energy consumption of the equilibrium network and the prolongation of the network lifetime.
Sensor-cloud system based on fog computing can provide better services. The system combines many key technologies and has powerful service functions. It can provide different technical support for different user requests. For example, the response time and response accuracy are more concerned with the sudden response, and the adaptive block compressed perception and fog computing layer mobile node load balancing allocation strategy can be used to provide more rapid and accurate decision information.
Conclusion
In this article, the problem of data acquisition in WSNs was studied. A sensor-cloud data acquisition scheme based on fog computing and adaptive block compression was proposed, which solved the problems of large data processing network, high task delay, and unbalance of energy consumption. On the basis of building fog computing sensor-cloud system architecture, adaptive block compressed perception, fog computing layer mobile node load balancing allocation, multi-mobile node data acquisition path planning, and ECO algorithm were designed, and the concrete implementation process was given. Finally, the simulation experiment also verified the effectiveness and outstanding advantages of the proposed scheme. Next, we will study the direction of sensor-cloud security and privacy, quality of service, and so on.
Footnotes
Appendix 1
Appendix 2
Handling Editor: Francesco Longo
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Natural Science Foundation of China under grant 61871313; the Natural Science Basic Research Plan in Shaanxi Province, China, under grant 2017JM6096; China Postdoctoral Science Foundation funded project, China, under grant 2018M633573; the Xi’an Science and Technology Project, China, under grant 2017076CG/RC039(XAHK001).