
Abstract
A complex earthquake monitor network includes satellite in-orbit and ground observation and requires good synchronization in time. This article investigates synchronization of complex networks with uncertainty and time-delay. Directed graphs are used to represent the interaction topology. The uncertainty is assumed to be norm bounded. Based on Lyapunov theory, sufficient conditions are given to guarantee the synchronization of the complex networks in the presence of time-delay. Simulation results are provided to demonstrate the effectiveness of the obtained results.
Introduction
Synchronization of complex dynamical networks have attracted considerable attention from so many fields such as biology, physics, robotics, and control engineering.1–22 This is partly due to recent technological advances in communication and computation, and important practical applications, ranging from the Internet, automated highway systems, low-orbit satellites, coordinated navigation, multi-sensor of earthquake monitoring network,and so on.23–26 A complex network consists of a large number of interconnected nodes, in which each node is a fundamental unit with specific purpose, especially when the earthquake monitor network covers types of observation instruments. For a given network, one of the basic problems is to find conditions under which synchronization can be achieved. In the past decade, numerous studies have been conducted on this problem. For example, Wang et.al. presented a uniform complex network model and investigated its synchronization in small-world and scale-free networks.5–7 In practical applications, some information in a complex network may not be able to be transmitted completely precisely due to the existence of various disturbances, such as uncertainty, time-delay, and the variation of the network topology,14–19 which might lead to divergence or oscillation of the complex networks. However, few works have been conducted to consider the parameter uncertainties and time-delay simultaneously for general complex networks.
For this situation, our objective in this article is to investigate global synchronization of general complex networks with uncertainty and time-delay. In the analysis, a Lyapunov-Krasovskii function is proposed, based on which sufficient conditions are obtained to guarantee the synchronization of the complex networks. In the absence and presence of time-delay, it is shown that all nodes can reach synchronization with desired
Graph theory
Let
Lemma 1
The directed graph
Lemma 2
Consider a directed graph

Then the Laplacian of
Model
Consider a dynamic network of

with initial condition

Here, we assume that

where
The dynamic network equation (1) is said to achieve synchronization if
Rewrite equation (1) by using the Kronecker product in a simple compact form

where

where
Let

Then the equation (4) can be transformed into the following equation

where
Our objective is to find design rules of the Laplacian

namely

According to Lemma 2,
Main results
In this section, we address the global synchronization of network and give design rules of the Laplacian
Lemma 3
(Schur Complement) For given symmetric matrix
Lemma 4
Consider the matrix
The eigenvalues of
There exists an orthogonal matrix
For simplicity, denote

where
Theorem 1
Suppose that the network graph has a spanning tree. For the network equation (1), synchronization can be reached with desired

where

with


Proof
First, we discuss the stability of equation (5) without external disturbances, that is,
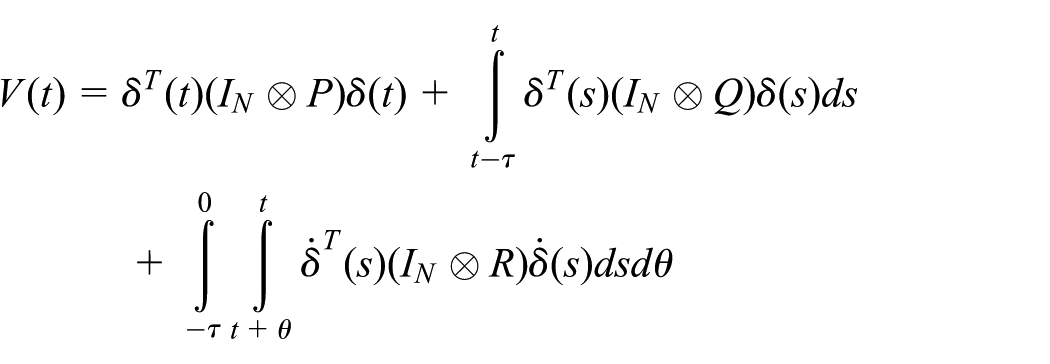
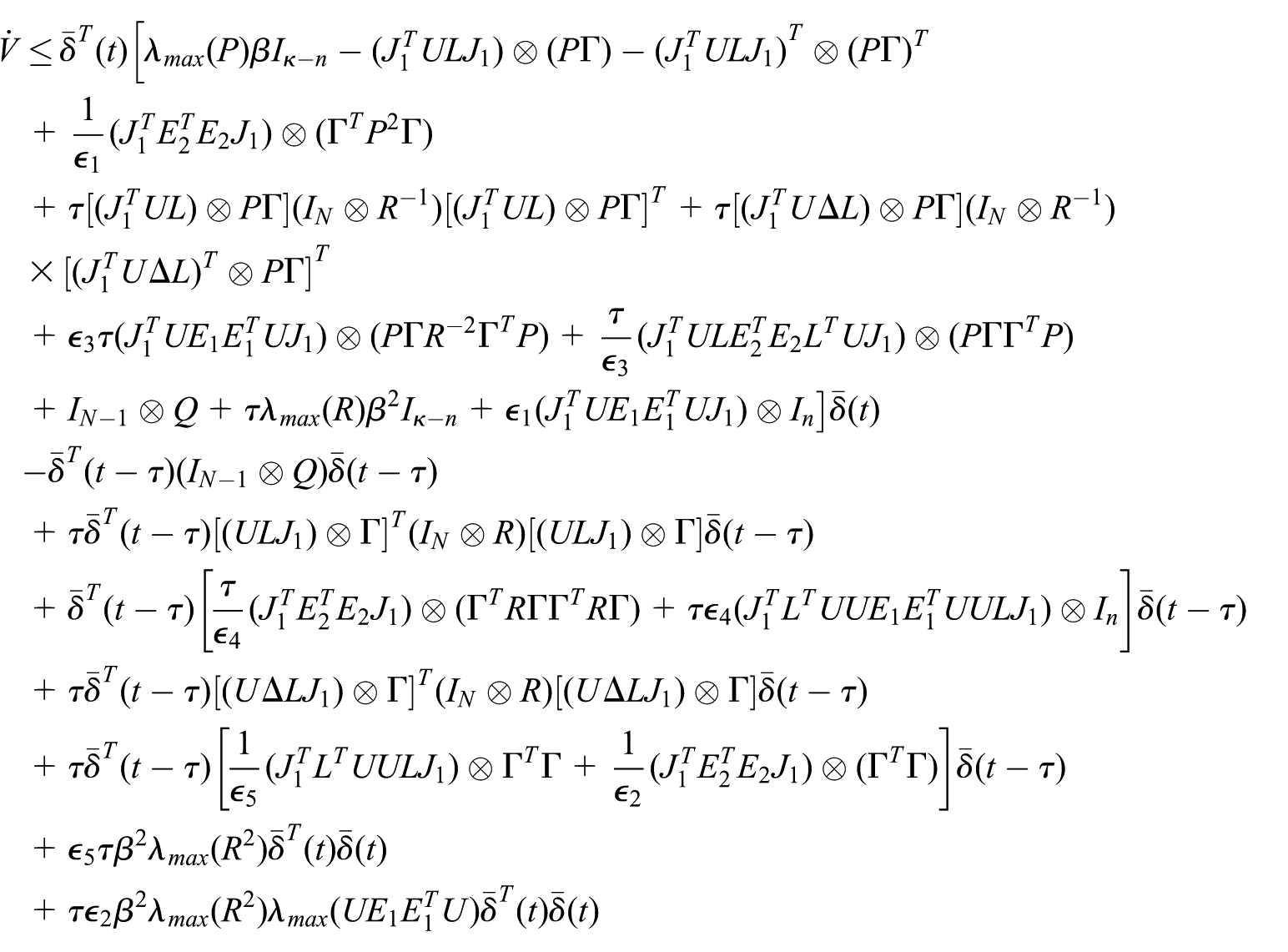
Calculating

By the Newton-Leibniz formula, we have

Then, for any

Thus, for any

where

where

and

As a result, we have

Let
Then, a sufficient condition for
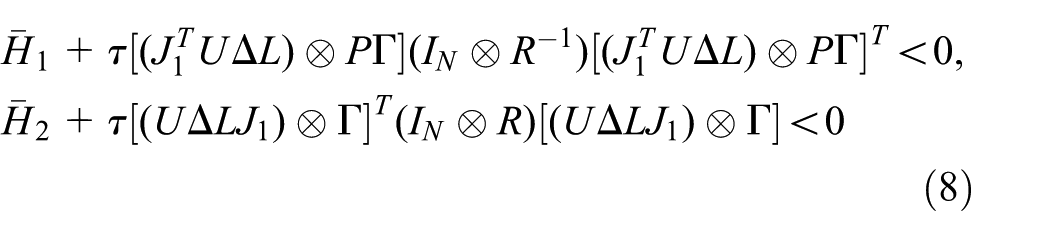
By Schur Complement Lemma, we have that

and
From equation (7), we get


Evidently, if
Now, we discuss the performance of the closed-loop system with disturbance

for
Consider the following cost performance for any

For any non-zero

where



So, if

By Schur Complement Lemma, it follows from equation (7) that
Remark 1
In Theorem 1, we make an assumption that the network has a spanning tree. Actually
Corollary 1
Suppose that the network has a spanning tree. For the network equation (1) with

where

Simulation
In this section, we will do simulations with four nodes to show the effectiveness of the results derived in previous sections. Suppose that

and the time-delay is

The state trajectories of all nodes with zero initial condition are shown in Figure 1 while the energies of the synchronization errors and the disturbances are shown in Figures 2 and 3, respectively. Clearly, all nodes asymptotically reach synchronization with desired

State trajectories of all nodes with zero initial condition.

The energy of all nodes.

The energy of the external disturbances.
Conclusion
This article investigates synchronization of complex networks with uncertainty and time-delay, which could find applications in the complex earthquake monitor network. Based on Lyapunov theory, sufficient conditions are given to guarantee the synchronization of the complex networks in the presence of time-delay with desired
Footnotes
Handling Editor: Hassen Fourati
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Hubei Provincial Natural Science Foundation of China (grant no. 2017CFB435), Scientific Research Fund of Institute of Seismology and Institute of Crustal Dynamics, China Earthquake Administration (grant no. IS201616249), the Basic Research Project of Institute of Earthquake Science, China Earthquake Administration (grant no. 2013IES0203 and 2014IES010102) and the National Natural Science Foundation of China (grant no. 41304018 and 41704082).