Finite time control and finite time function projective synchronization for complex networks are studied in this paper. The complex networks with time-varying delay and function projective synchronization are achieved in finite time. The method of pinning control is used to achieve the finite time projective synchronization. A few target nodes are chosen to finish pinning function projective synchronization in a finite time by construct a time-dependent Lyapunov function. An example is provided to illustrate the correctness of the theoretical analysis.
With the development of the complex networks theory, scholars use complex networks to describe the diversity and complexity of real society. The complex networks can demonstrate many realistic complex systems such as social networks, biological networks, computer networks, and so on.1,2 Complex networks can abstractly represent complex system, the complex system consists of many nodes. Different types of nodes represent different networks. When nodes represent computer, the complex network is computer networks. When nodes represent human beings, the complex network is social networks. When nodes represent biology, the complex network is biological networks, etc.1,2 Complex network is an important tool to study complex system. The study of complex networks can not only reveal the regularity of life and nature, but also solve the problems in many fields of society by using the theory and knowledge of the complex networks.3,4 Therefore, the complex networks has been widely studied.
Synchronization exists widely in nature, which also in complex network. Synchronization is a kind of clustering behavior, which represents the state of multiple homogeneous systems are consistent or gradually converges to consistent. Synchronization control is one of research content of complex networks.5 The synchronization of the complex network refers to the state of the different dynamic systems gradually achieve complete consistent. Complex network synchronization plays a very important role in the fields of intelligence optimization, nuclear magnetic resonance apparatus, secret communication equipment, information, and signal recognition, etc. The research of complex networks has attracted extensive attention.
There are a large number of nodes in the network, and each node need to controlled to achieve synchronization.5–7 But pinning control is an effective control method,8,9 its basic idea is to selectively control several nodes in the network to synchronization, which can greatly reduce the control cost.10–12 Synchronization control is divided into finite-time control and infinite-time control according to the synchronization time.13 Infinite-time control refers to the state of the system converges to consistent when time tends to infinity, finite-time control refers to the state of the system converges to consistent in fixed time. In recent years, the study of complex network synchronization control has achieved a lot of results. Liu et al. study the finite/fixed-time synchronization problem on complex networks with stochastic disturbances.14 Zhang et al. use quantized pinning control to fixed-time synchronization of complex networks.15 Wu and Bao study the finite-time synchronization of fractional-order multiplex networks.16 Yang et al. propose the finite-time synchronization of delayed complex dynamical.17 Zhang et al. study finite-time and fixed-time bipartite synchronization.18 Luo et al. study finite-time synchronization control of coupled reaction-diffusion complex network systems.19 Xu et al. investigate finite-time synchronization for a class of the complex dynamical network.20,21 Xu et al. use pinning control method to study finite-time synchronization for networks.22 Lu et al. investigate finite-time synchronization problem for complex system.23 However, the current research on the finite-time pinning synchronization control problem focuses on complete synchronization and rarely research on time-varying delay and function projective synchronization in finite-time by pinning control, which will be the motivation for us to carry out this study.
Inspired by the above discussions, function projective synchronization control is proposed and time-varying delay is discussed by designing Lyapunov function and finite time control theory. The content of this article are summarized as: Firstly, theory of pinning control and finite-time control are presented, by which Lyapunov function is established. Secondly, the finite time pinning function projective synchronization control is designed, sufficient conditions are established to guarantee that the complex networks with time-varying delay achieve finite time pinning function projective synchronization. Theoretical proof and numerical simulation show that the correctness of the theoretical analysis. Thirdly, the time-varying delay exists in complex networks, complex networks with time-varying delay is researched. This paper is organized as follows. In Section “Problem formulation,” we summarize some preliminaries and problem statement. In Section “Main results,” we obtain the main results. The control strategies are given in Section “Finite time pinning function projective synchronization control of complex networks with time-varying delay.” Section “Numerical simulations” is numerical simulations.
Problem formulation
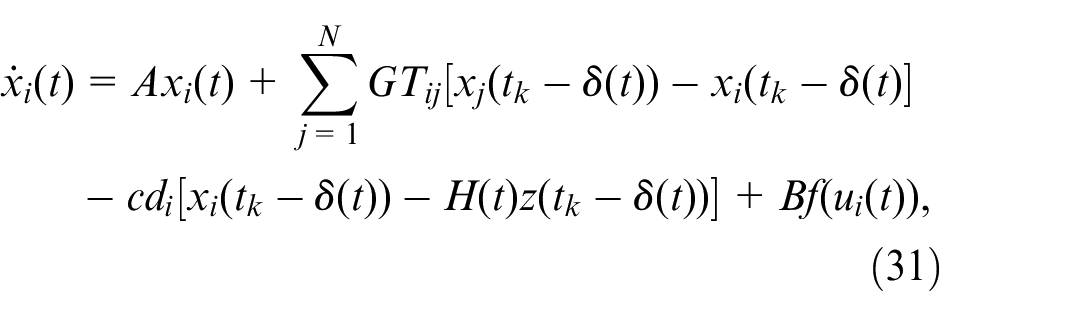
In this article, the pinning control strategies is presented for achieving finite time pinning function projective synchronization control for complex networks, the complex networks containing N nodes can be illustrated as follows,
represent ith node. Matrix information interchange between nodes i and j, A diagonal matrix describes the all information channels between nodes j and i. shows nodes j and i message exchange each other through the kth channel, otherwise . The is pinning controller. Function satisfy global Lipschitz condition. The matrix C is defined as , is real matrix.
The target node satisfy,
the controller is to achieve synchronization control through control target nodes . The error is defined as , the represents between the ith node and target node , . When is a function, synchronization is function projective synchronization. When each element of the matrix q(t) is equal to 1, synchronization is called complete synchronization. The purpose of this article is to design a controller such that can achieve function projective synchronization for complex networks with time-varying delay in finite time by pinning control.
According to equations (1) and (2), the error dynamic equation as follows,
where and . The controller is designed as follows,
where is the coupling strength, pinning control gain is . Let U and be all the collection of all nodes and the collection of the pinning nodes, respectively. When , . Otherwise, .
In order to realize pinning control for complex network, leaders must directly or indirectly influence all nodes of the network, then network nodes and leaders constitute graph which must contains a directed spanning tree, and the leader is the only root node. For connected undirected networks, there are two ways to choose pinning node: choose randomly and specific selection. Generally speaking, the nodes with large priority pinning can have better control performance for scale-free network. However, select the node with large priority pinning and randomly select the pinning node have the same control performance for stochastic network. When the coupling strength is smaller, the effect of the node with small pinning is better. When the topology of an undirected network is not connected, the network topology is composed of multiple connected subgraphs. The pinning nodes are selected for each subgraph in a random or specific way, then the union of the pining node set of all subgraphs is set of the pinning node.
The error dynamic equation (3) is rewritten as follows,
the matrix is defined as
the is dimensions, .
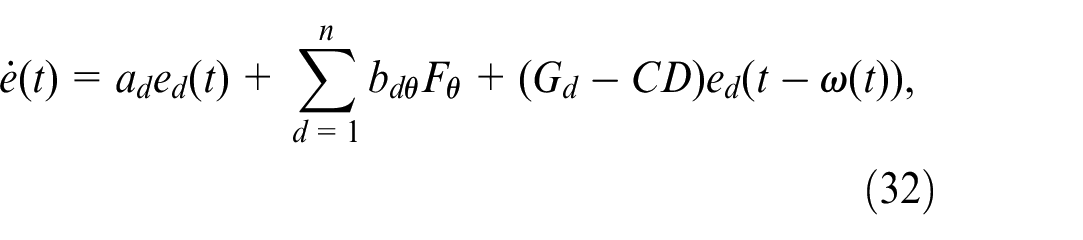
The is the synchronization error. If finite time pinning function projective synchronization is achieved, the error of all channels converges to zero in finite time. Therefore, the error dynamic equation of the dth channel as follows,
where
Some finite-time control theory are introduced before give main results.
Definition 1: The complex networks (1) is said to be finite time pinning function projective synchronized to the target trajectory , if there is a moment , thus
where matrix and are two positive scalars, W is a vector function, .
Main results
In this section, a finite time control scheme is designed by finite-time control theory and Lyapunov function. The sufficient conditions for synchronization control are derived.
Theorem 1. Base on Lemma 2, given two positive scalars , if there are scalars and matrices , the following linear matrix inequalities hold for .
where
Then finite time pinning synchronization control is completed.
Proof. Constructing the following a Lyapunov function,
where
Then,
The and base on equation (11). So Lyapunov function is reasonable. Taking the derivative of equation (12),
According to Lemma 1, the stability of the kth channel is achieved, thus finite time pinning function projective synchronization control is achieved.
Remark 1. The novel controller is designed to assure the finite time pinning synchronization. The upper bound of maximum sampling and the coupling strength can be calculated by using the LMI box. Base on Jensen’s inequality, Schur theorem and Wirtinger’s inequality, the finite time controller is designed to achieve function projective synchronization control by pinning control.
Finite time pinning function projective synchronization control of complex networks with time-varying delay
In this section, finite time pinning function projective synchronization of complex networks with time-varying delay is investigated. Time-varying delay exists widely in information transmission, the time-varying delays are more widespread than constant delay. The time-varying delay to be considered in complex networks, the time-varying delay is . and are the state of the ith node and the target node, respectively. The upper bound and lower bound of the sampling intervals are and .
where is the maximum interval between and . Designing the following the controller of the finite time synchronization,
The equation of state for the ith node,
which
Let and . Then
In the following context, a novel condition is obtained to guarantee finite time pinning function projective synchronization.
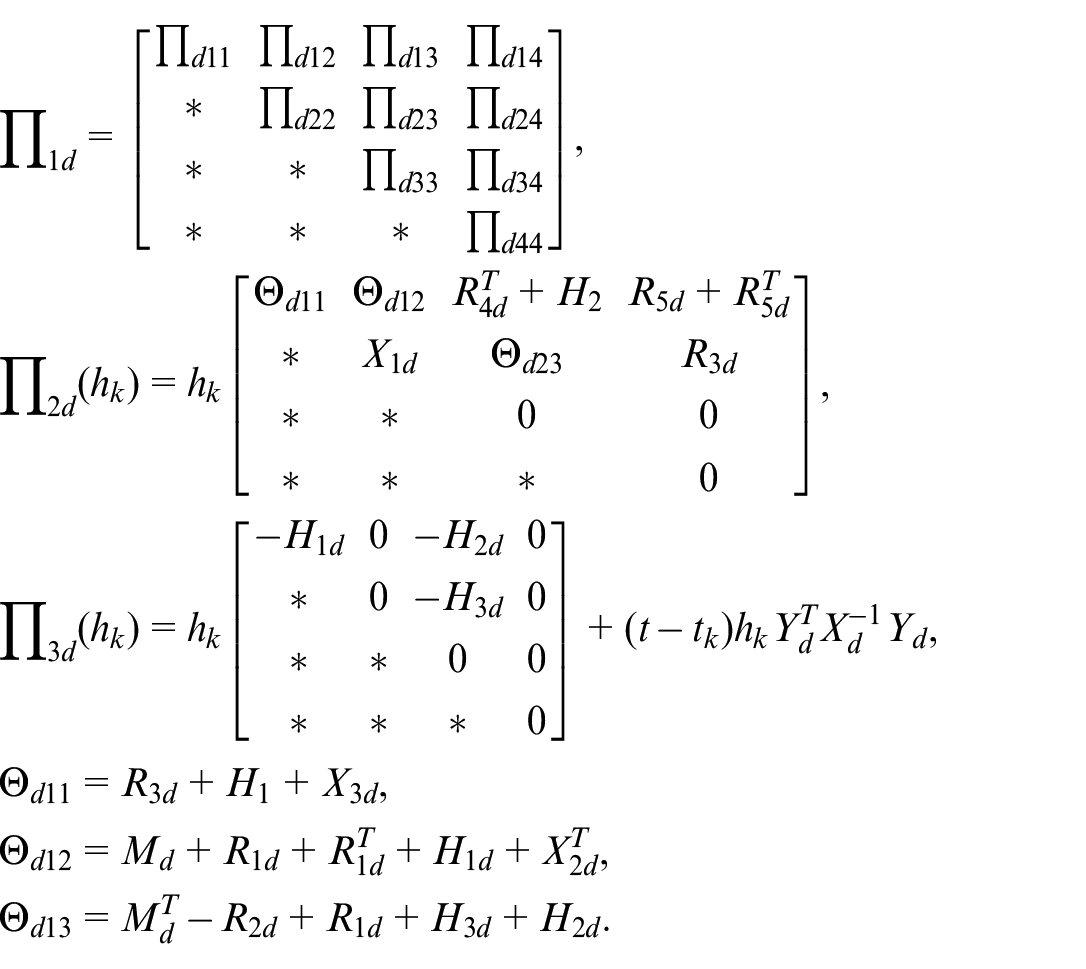
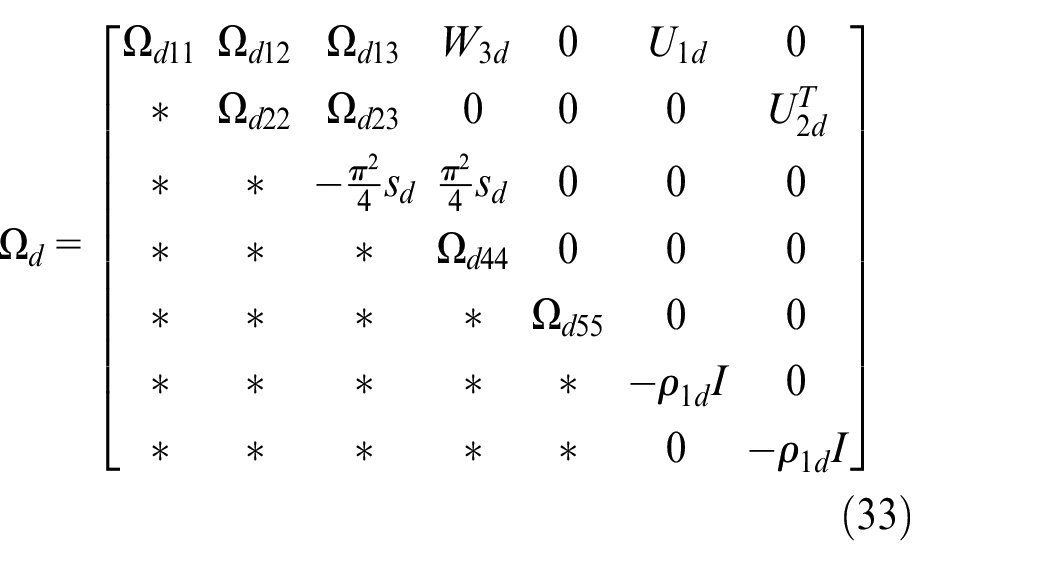
Theorem 2. According to Lemma 2, delay and is the maximum time interval, which between and , if there is the following matrices,
where
Therefore, for any initial condition, finite time pinning control can be completed.
Proof. The following Lyapunov function is contracted,
The Then finite time pinning function projective synchronization control of complex networks is achieved.
Numerical simulations
In this section, an example is given to prove the validity of a theoretical test. Lorenz equation (31) is chosen as the node of complex networks,
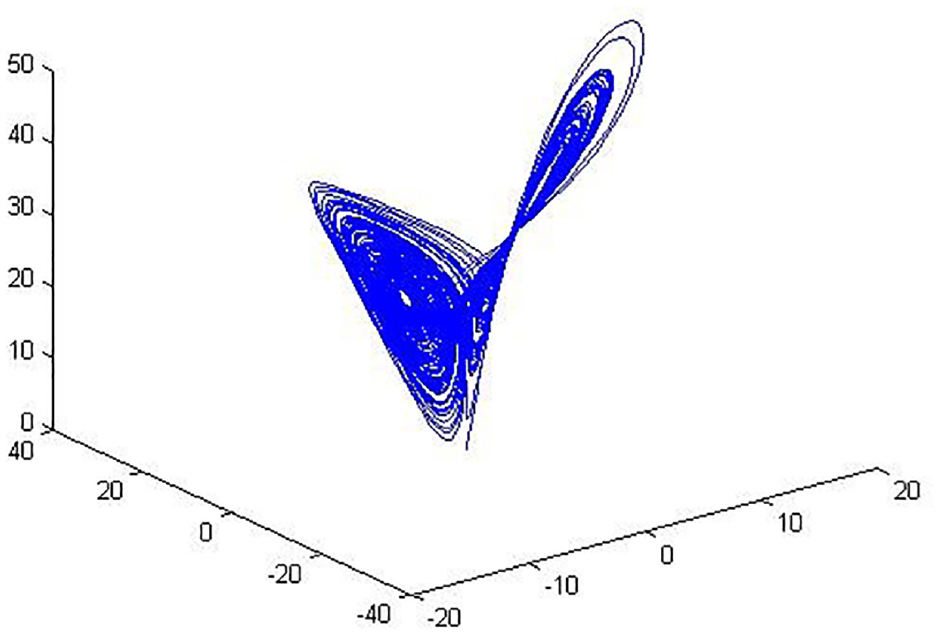
where x, y, z are state variable, respectively. The parameters are chosen as , the initial condition is chosen as . The trajectory of Lorenz system is shown in Figure 1.
The trajectory of Lorenz system.
The matrices for equation (1) are chosen as follows,
The node 1and node 3 are pinned and pinning matrix is chosen as
Due to Lorenz system is a three-dimensional system, there is three information interchange channels between node i and j,
The matrices as follows,
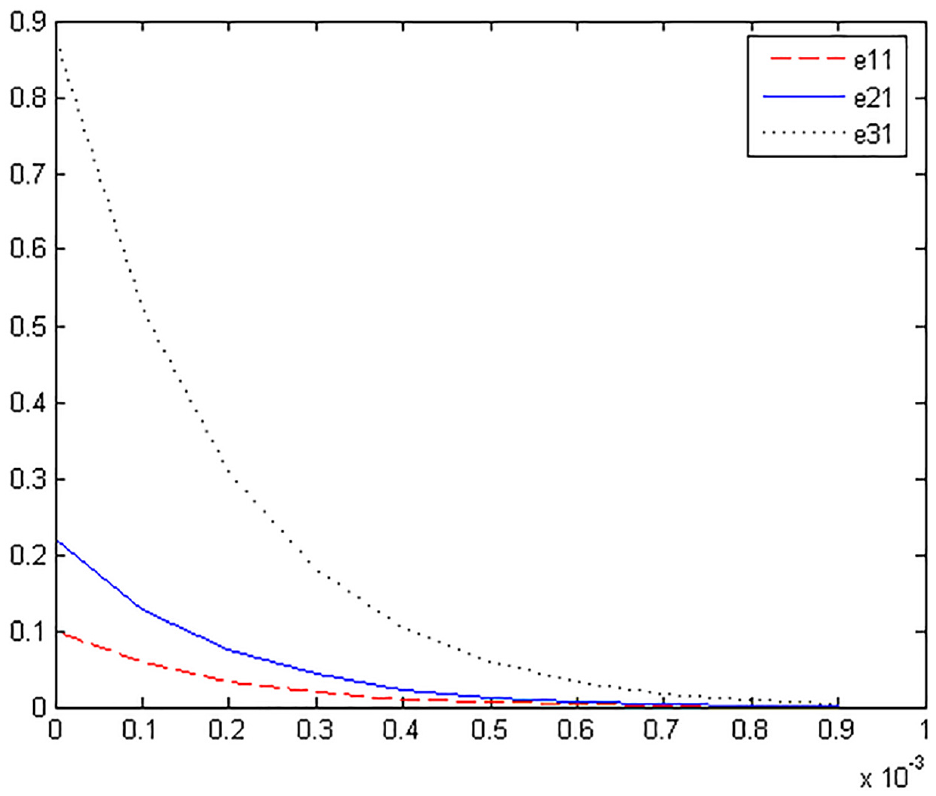
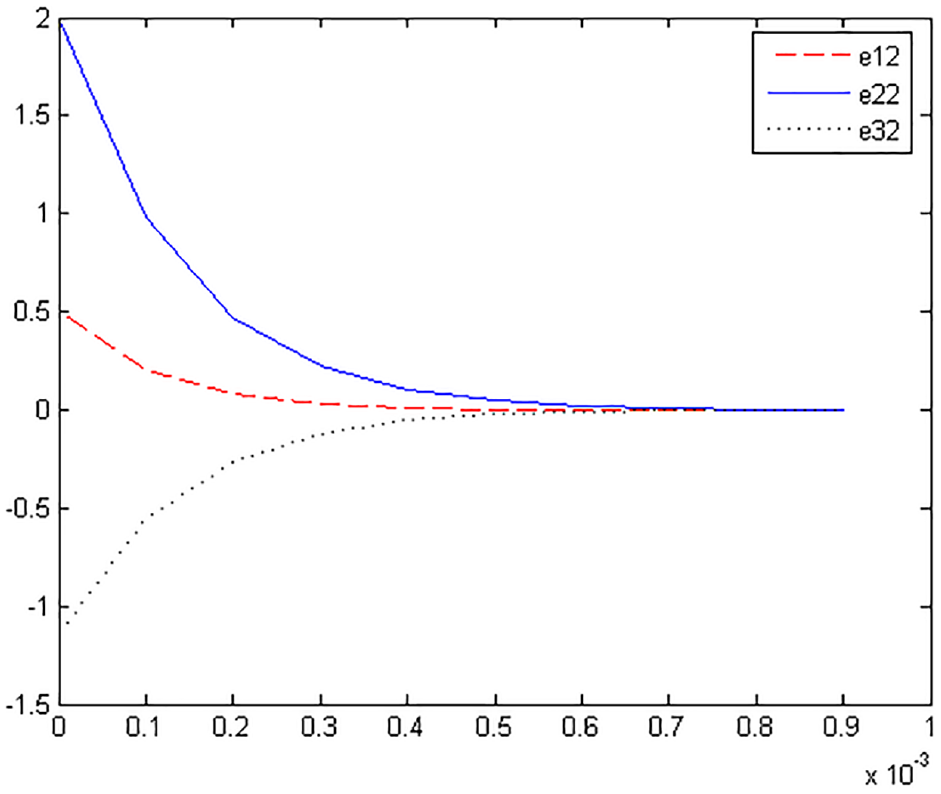
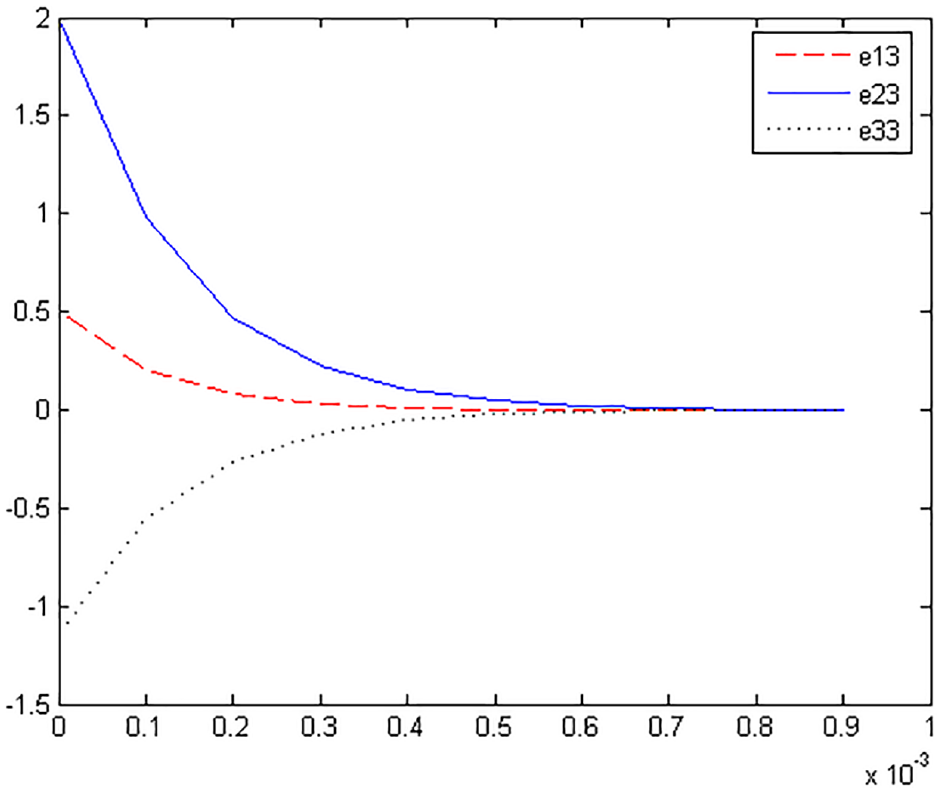
The initial value of the target node is , the error , where Figures 2–4 show that the synchronization error converge to zero in finite time.
Synchronization error of the first channel and target node.
Synchronization error of the second channel and target node.
Synchronization error of the third channel and target node.
Conclusions
Finite time pinning function projective synchronization control for complex networks is investigated, the time-varying delay is considered in network synchronization. The complex networks can be achieved function projective synchronization in finite time by control target nodes. A finite time Lyapunov function has been established to accomplish pinning function projective synchronization. Sufficient conditions have been derived to ensure the finite time pinning synchronization for complex networks with a target node. A discrete controller have been constructed by the method of finite time and the pinning control.
Footnotes
Acknowledgements
The authors would like to thank the support by the 13th five-year science and technology project of the Education Department of Jilin Province (Nos: JJKH20190646KJ), Doctor Start-up capital of the Beihua University (Nos: 199500096). The second author would like to thank the support of the key scientific research projects in the Science and Technology Development Plan of Jilin Province (Nos. 20160204033GX). Science and technology development project of Jilin Province (Nos: 20200404223YY). Science and technology development plan project of Jilin Province (Nos: 20220101137JC).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iDs
Wen-tao Rong
Qiang Wei
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
1.
ShiYZhengYGuoK, et al. Relationship between herd behavior and Chinese stock market fluctuations during a bullish period based on complex networks. Int J Inf Technol Decis Mak2022; 21(1): 405–421.
2.
ZhaoXLChenXLYHuCZ, et al. Measurement of software structural properties based on the theory of complex networks. Appl Mech Mater2014; 602–605: 2163–2169.
3.
HongJWangSLLiCY.Community detection in complex networks by density-based clustering. Phys A: Stat Mech Appl2013; 392(19): 4606–4618.
4.
LiuXYLuoC.The volatility in financial time series based on granule complex network. Int J Mod Phys C2021; 32(9): 2150116.
5.
CoraggioMLellisPDBernardoMD.Convergence and synchronization in networks of piecewise-smooth systems via distributed. Automatica2021; 129: 109596.
6.
YuHTGaoHBDengHC, et al. Synchronization control with adaptive friction compensation of treadmill-based testing apparatus for wheeled planetary rover. IEEE Trans Ind Electron2022; 69(1): 592–603.
7.
XuYWuZG.Distributed adaptive event-triggered fault-tolerant synchronization for multiagent systems. IEEE Trans Ind Electron2021; 68(2): 1537–1547.
8.
KongFDSunJP.Synchronization of complex dynamical networks on time scales via pinning control. Math Probl Eng2021; 2021(11): 1–12.
9.
LinHWangJ.Pinning synchronization of complex networks with time-varying outer coupling and nonlinear multiple time-varying delay coupling. Phys A: Stat Mech Appl2022; 588: 126564.
10.
HouHZhangQ.Finite-time synchronization for second-order nonlinear multi-agent system via pinning exponent sliding mode control. ISA Trans2016; 65: 96–108.
11.
WangJLWeiPCWuHN, et al. Pinning synchronization of complex dynamical networks with multiweights. IEEE Trans Syst Man Cybern Syst2019; 49(7): 1357–1370.
12.
LiYLiuYWuY, et al. Pinning synchronization control of complex networks with partial couplings. Proc IMechE, Part I: J Systems and Control Engineering2020; 7: 095965181989833.
13.
ShenJCaoJ.Finite-time synchronization of coupled neural networks via discontinuous controllers. Cogn Neurodyn2011; 5(4): 373–385.
14.
LiuXHoDSongQ, et al. Finite/fixed-time pinning synchronization of complex networks with stochastic disturbances. IEEE Trans Cybern2018: 49(6): 2398–2403.
15.
ZhangWLiHLiC, et al. Fixed-time synchronization of complex networks via quantized pinning control. ISA Trans2019; 91: 151–156.
16.
WuXBaoH.Finite time complete synchronization for fractional-order multiplex networks. Appl Math Comput2020; 377(8): 125188.
17.
YangDLiXSongS.Finite-time synchronization for delayed complex dynamical networks with synchronizing or desynchronizing impulses. IEEE Trans Neural Netw Learn Syst2020; 33(2): 736–746.
18.
ZhangWYangXYangS, et al. Finite-time and fixed-time bipartite synchronization of complex networks with signed graphs. Math Comput Simul2021; 188(10): 319–329.
19.
LuoYYaoYChengZ, et al. Event-triggered control for coupled reaction-diffusion complex network systems with finite-time synchronization. Phys A: Stat Mech Appl2021; 562(15): 125219.
20.
XuYZhouWXieC, et al. Finite-time synchronization of the complex dynamical network with non-derivative and derivative coupling. Neurocomputing2016; 173(3): 1356–1361.
21.
MaoKLiuXCaoJ, et al. Finite-time bipartite synchronization of coupled neural networks with uncertain parameters. Phys A Stat Mech Appl2022; 585: 126431.
22.
XuCYangXLuJ, et al. Finite-time synchronization of networks via quantized intermittent pinning control. IEEE Trans Cybern2018; 48(10): 3021–3027.
23.
LuXDZhangXFLiuQG.Finite-time synchronization of nonlinear complex dynamical networks on time scales via pinning impulsive control. Neurocomputing2018; 31: 2104–2110.