
Abstract
In vehicular ad hoc networks, vehicle-to-vehicle–based broadcast can fast disseminate safety messages between vehicles within the whole network and hence expand drivers perception vision, which will reduce the accident probability and ensure the transportation reliability. As for fixed-period single-hop broadcast protocol, disseminating safety messages frequently can cause excessive network load. However, increasing period purely does not guarantee the real-time performance. In addition, exiting adaptive-period single-hop broadcast protocols also have limitations without considering synthetically various impact factors. Thus, how to design a single-hop broadcast protocol that can dynamically adjust the broadcast period according to the actual road condition is a pressing issue. A Fuzzy Logic Based Adaptive-period Single-hop Broadcast Protocol in vehicular ad hoc networks is designed in this article, which provides a new solution for the dissemination of period safety messages. In this article, the impact of various factors (such as the number of one-hop neighbor nodes, vehicle speed, received signal strength index, and visibility) on the single-hop broadcast period has been analyzed. In view of each impact factor, we design corresponding membership function and fuzzy rules according to the specific scenarios and parameters. It realizes the adaptive changes of period safety messages broadcast period through the simulation of the proposed fuzzy logic inference system. Finally, we verify the performance of the Fuzzy Logic Based Adaptive-period Single-hop Broadcast Protocol in a bidirectional four-lane highway scenario. Simulation results show that the proposed Fuzzy Logic Based Adaptive-period Single-hop Broadcast Protocol has obvious advantages in terms of network load ratio, average one-hop delay, and delivery ratio.
Introduction
Vehicular ad hoc networks (VANETs) have been attracted much attention in both industry and academia recently.1,2 One of the important applications of VANETs is to transmit safety messages between vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I), so as to reduce traffic accidents, avoid traffic jams, and save fuel consumption.3–5 Different from the unicast messages (point-to-point messages, for example, the data packets transmitted over the Internet) transmitted in a conventional network, the traffic safety messages are transmitted by the way of broadcast. It is the reason that the traffic messages are related to public advantages and most vehicles on the road may be interested in that. Thus, compared with the unicast routing protocol, the broadcast routing protocol is more suitable to undertake the task of safety messages dissemination in VANETs. 4
Safety messages are divided into two categories in VANETs.6,7 One is periodic safety message (PSM), including the speed, position, and direction of the vehicle. In the form of Beacon, PSMs are disseminated periodically by means of single-hop broadcast. Therefore, vehicles on the road can acquaint with the real-time status of neighbor vehicles to prevent accidents. The other is event-driven emergency warning message (EWM), which is the real-time emergency alarming messages resulting from traffic accident. The EWMs could to be disseminated in VANETs immediately. Due to the limitation of the communication range of a vehicle, the EWMs should be disseminated by means of multi-hop broadcast. The EWMs can be forwarded by the relay nodes to the target vehicles in a further distance, thus avoiding a chain-collision-accident. For the above reasons, the safety message dissemination mechanisms in VANETs can be divided into single-hop broadcast and multi-hop broadcast. Thereinto, according to beaconing category, the single-hop broadcast protocol can be divided into message frequency control (MFC),8,9 transmit power control (TPC),10,11 miscellaneous,12,13 and hybrid14,15 situations. 7 This article takes the MFC into account. With MFC, the single-hop broadcast protocol can be divided into two categories: fixed-period single-hop broadcast protocol16,17 and adaptive-period single-hop broadcast protocol.18–21
As for fixed-period single-hop broadcast protocol, Zhong et al. 16 proposed the TrafficInfo protocol that selects and broadcasts the most relevant messages rather than all the messages to reduce the information redundancy. Nakorn et al. 17 proposed a single-hop broadcast protocol based on Bloom filter. Based on the characteristics of the Bloom filter in data storage to reduce the size of the message, their proposed protocol can reduce the network load greatly. Due to the fact that the fixed-period single-hop broadcast protocol can broadcast safety messages frequently, when the vehicle density is too large, it will occupy too much channel resource and make the network overloaded. Therefore, researchers have proposed the adaptive-period single-hop broadcast protocol which could adjust the broadcast period adaptively. It can dynamically adjust the frequency of sending safety messages and has the advantage of lower network load. Based on two key parameters, that is, message availability and channel quality, Sommer et al. 18 proposed the adaptive traffic beacon (ATB) protocol to adjust broadcast period. The successive rate and power adaptation (SuRPA) protocol proposed by Zemouri et al. 19 adopts a joint adaptive approach combining transmission rate with transmission power to solve the problem of channel congestion. Chaabouni et al. 20 proposed the collision-based beacon rate adaptation (CBA) protocol, which takes congestion time as a parameter to adjust the frequency of message generation. Hassan et al. 21 carried out a fuzzy processing of the data packet carried time, the number of single-hop neighbor nodes, and the vehicle speed according to fuzzy logic theory. The performance of the single-hop broadcast protocols with corresponding adaptive period is better than those with fixed period.
Theoretically, the period of one-hop should be as short as possible to ensure the real-time characteristic of messages. However, the PSMs can share the channel resource when they are broadcasted. Therefore, too high frequency to broadcast messages could result in channel overloading and cause channel congestion. It is a tradeoff between real-time characteristic of messages and channel occupancy. Traditional fixed-period single-hop broadcast protocols have poor scalability. The network load will increase sharply with the traffic density, because they only considers the real-time characteristics of PSMs. Most adaptive-period one-hop broadcast protocols usually do not consider the restrictive relation between various factors, including channel state, weather condition, traffic density, and vehicle speed. It is complicated to establish a mathematical model which can think about all kinds of factors. However, the fuzzy logic inference method can consider the restrictive relation among various factors, without developing the complicated mathematical model. Therefore, in this article, in view of fuzzy logic inference method, we design an adaptive-period single-hop broadcast protocol, named after Fuzzy Logic Based Adaptive-period Single-hop Broadcast Protocol (FL-ASB). We verify the effectiveness of FL-ASB in network load ratio, average one-hop delay, and delivery ratio through simulations, compared with the fixed-period single-hop broadcast protocols and the adaptive-period single-hop broadcast protocol (ASB 21 ).
The rest of this article is organized as follows. Section “Fuzzy logic theory” briefly introduces the concepts, principles, and inference process of fuzzy logic. Section “Adaptive-period method based on fuzzy logic” synthetically considers several important impact factors, designs the corresponding membership function and fuzzy rules set, and realizes the adaptive changes of PSMs broadcast period by simulating the fuzzy logic inference system. Section “Simulation results and discussions” presents the simulation results to verify the performance improvement of the FL-ASB protocol in network load ratio, delivery ratio, and average one-hop delay. Finally, conclusions are drawn in section “Conclusion.”
Fuzzy logic theory
The traditional mathematical logic is a classical two-value logic, that is, “true” or “false,” usually expressed as “1” or “0.” However, in the fuzzy logic, a proposition could be “partial true” or “partial false.” The degree that a proposition belongs to “true” or “false” can be measured by degree of membership. On account of the transition states between two values expressed by degree of membership, researchers can use the accurate mathematical model to describe fuzzy problems. 22
Fuzzy set and membership function
The two-value logic is usually used for classical sets. Given any set
The fuzzy set
Zadeh representation

Ordered couple representation

Vector representation

For continuous domain

In general, for different problems, we should choose different kinds of membership functions, according to the analysis of experts in related field. The frequently used membership function is triangular membership function, trapezoidal membership function, and sigmoid membership function.
Fuzzy inference
Fuzzy inference means a process which derive a new fuzzy proposition through the known fuzzy proposition and exiting definite rules. The known fuzzy propositions are called premises, the rules used by inference are called fuzzy rules, and the fuzzy propositions inferred are called conclusions.
Fuzzy inference is a kind of approximate inference, which is the process that corresponds the input fuzzy set to a specific output fuzzy set according to those certain fuzzy rules. Fuzzy rules play an important role in the process of fuzzy inference, and they are described in natural language based on experts’ experience, which expression form is usually “If
The fuzzy inference process usually includes four parts: fuzzification, fuzzy rules base, inference method, and defuzzification, as shown in Figure 1:
Fuzzification. The process of converting specific input values into degree of membership of fuzzy sets via membership functions.
Fuzzy rules base. The “brain” of fuzzy logic inference, which stores all “IF-THEN” rules that fuzzy inference required. These rules are usually described by experts using natural language based on their experience.
Inference method. The method of obtaining the final fuzzy conclusion, according to the degree of membership of input variables to fuzzy sets and the detailed fuzzy rules. There are many ways about fuzzy inference. The conclusions may be different with different methods. Among the methods, the Mamdani inference method based on Max–Min compositional rule is usually used.
Defuzzification. The process of converting the fuzzy conclusions into detailed output values. The most common method is center of gravity (CoG) method.

The four parts of fuzzy logic inference.
Adaptive-period method based on fuzzy logic
In this section, we will follow the steps of fuzzy logic inference and introduce how to use fuzzy logic inference method to obtain the adaptive single-hop broadcast period, considering several factors, such as traffic density, vehicle speed, channel state, and objective weather condition.
Scenario and problem description
At present, the main scenarios of message dissemination mechanism in VANETs can be divided into highway, urban expressway, and urban intersection. Compared with intersections and expressways in urban scenario, it is easier to analyze vehicle movement patterns in highway scenario. The lane shows a one-dimensional straight line shape in highway, where the vehicles move in only one lane. Therefore, in order to reduce complexity, this article focuses on the scenario of bidirectional four-lane highway with design speed of 120 km/h. As shown in Figure 2, the vehicles in top two lanes are eastbound, and the vehicles in bottom two lanes are westbound. In addition, we ignore the emergency parking lane and ramp.

Bidirectional four-lane highway scenario of design speed of 120 km/h.
Theoretically, larger the single-hop broadcast period is, smaller the broadcast frequency of safety messages is, smaller the updating frequency of safety messages is, worse the real-time performance is, but smaller the channel load is. In fact, the single-hop broadcast period can be affected by many factors, such as traffic density, vehicle speed. For example, when the traffic density is large, if the broadcast period is short, a large number of vehicles will broadcast safety messages frequently, resulting in the excessive channel load and congestion. Therefore, when the traffic density is large, the broadcast period should be extended, so as to decrease the broadcast frequency and reduce the channel congestion. Conversely, we allow a short broadcast period. Considering the impact factors of the single-hop broadcast period, Hassan et al. 21 focused on the number of neighbor nodes in one-hop, vehicle speed, and packet carried time and derived the adaptive one-hop broadcast period through fuzzy logic method. However, it has several limits below.
Statistical method for the number of neighbor nodes in one-hop
Hassan et al. 21 calculated the number of one-hop neighbor nodes of target vehicle to represent the current local traffic density, which is simple and effective. However, there are some limitations that it only considers the vehicles which are in front of the target vehicle in the same moving direction. Therefore, the traffic density is smaller without taking into account the vehicles behind the target vehicle. It could affect the design of the one-hop broadcast period.
Necessity of packet carried time
Hassan et al. 21 used the packet carried time to represent the time that a packet is carried by some vehicles before it is forwarded. However, in the single-hop broadcast scenario of this article, each vehicle periodically transmits and receives PSMs from its neighbor vehicles, without using carry-forward mechanism. Therefore, this article does not consider the affect of packet carried time on the one-hop broadcast period.
Comprehensiveness of impact factor
Hassan et al. 21 only took into account three factors which effect the one-hop broadcast period, which are incomplete. There are other significant factors to consider. First, the state of the wireless channel has a great impact on the quality of communication. In VANETs, the large vehicle speed could have serious impact on the state of wireless channel. Hence, it is necessary to analyze the impact of wireless channel state. The better wireless channel state is, the higher frequency of messages dissemination that can be allowed is. Second, the weather factor could have a impact on the drivers behavior and judgment in the actual driving environment. The visibility will directly affect the drivers visual range and indirectly affect the drivers driving behavior (drivers are more likely to travel at a low speed when the visibility is poor). Thus, the frequency of safety messages dissemination could be different with visibility. When the visibility is poor, the broadcast frequency of safety messages should be increased to help drivers obtain real-time traffic information.
Selection of impact factor
From the analysis above, we can find that there are some limitations in the adaptive adjustment of single-hop broadcast period. In order to solve them, we will think over the following factors comprehensively and make a more reasonable adaptive adjustment for the single-hop broadcast period.23–25
Number of one-hop neighbor nodes N (veh)
In this article, the calculation of the number of neighbor nodes in one-hop range is based on the following two principles, as shown in Figure 3. First, the communication radius
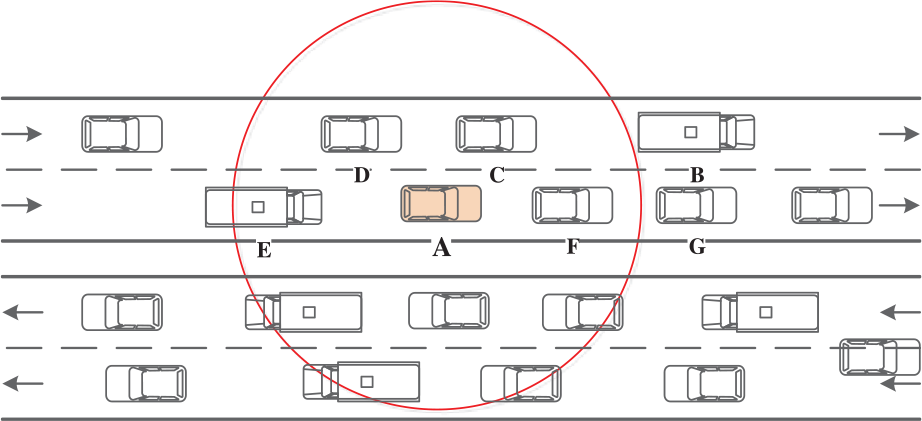
Neighbor node numbers in one hop.
Vehicle speed V (m/s)
Vehicle speed is one of the important information of vehicle operating status. It can indirectly reflect the traffic density and the changing frequency of vehicle status. According to traffic flow theory, when the traffic density is too large, the vehicles tend to have a low speed. The vehicles move almost smoothly, and there is no need to update PSMs frequently. However, when the traffic density is small, the vehicles tend to have a high speed. The status of vehicles will change violently in a short time. Therefore, it is necessary to increase the frequency of updating PSMs, so that the vehicles can obtain the information of neighbor vehicles timely. In summary, the speed of vehicles must be also considered.
Received signal strength index
In wireless communication environment, the high speed of vehicles will further aggravate the Doppler effect and multipath effect, having a great impact on the wireless channel. Thus, it is very important to consider the wireless channel when we calculate the broadcast frequency of the PSMs. The broadcast frequency of safety messages could be increased in a good wireless channel state. While the wireless channel state is bad, we should decrease the broadcast frequency of safety messages to reduce the channel load and avoid the channel congestion. In this article, we adopt received signal strength index (

where

which means that in the initial conditions (there is only one vehicle
Visibility D (km)
Different from traditional wireless communication scenarios, in the actual environment of road traffic, weather is also an objective factor to consider, in addition to several factors that can directly affect the wireless communication. In some bad weather conditions, such as rain, snow, fog, it can cause the road slippery and hard to drive on it, which will even lead to traffic accidents. And it can also make the drivers have a poor visibility to bring dangerous consequences. In VANETs, the PSMs can expand drivers visual field and reduce the impact of poor visibility on drivers. Thus, in this article, we consider the objective environment factor, that is, visibility, as a significant factor to affect the safety messages broadcast period and quantify the visibility for analysis. Visibility is the maximum distance that a person with normal vision can see the outline of a target in some weather condition. In this article, visibility is denoted by
Fuzzification
In fuzzy logic inference, fuzzification is the process of mapping each specific input variable to the degree of membership through the membership function. In this process, the determination of the membership functions of input variables is crucial. In this article, through repeated tests, we select four membership functions as below, which correspond to each input variable, respectively.
Membership function of the number of one-hop neighbor nodes N (veh)
According to the classification of highway service level in China “Technical Standard of Highway Engineering”
26
and traffic flow theory, we can calculate the number of vehicles per lane under different traffic densities, with the one-hop communication range
Service level classification of highway with design speed of 120 km/h.


Membership function of the number of one-hop neighbor nodes.
Membership function of vehicle speed
(m/s)
According to the related traffic laws in China, the speed of the vehicles should be between 60 and 120 km/h, when they are on a highway designed to run at 120 km/h. With different values of

Membership function of vehicle speed.
Membership function of RSSI
We normalized the value of

Membership function of RSSI.
Membership function of visibility D (km)
Visibility is usually distinguished by the maximum distance where the target contour can be seen clearly. Generally, it can be divided into eight levels. In order to facilitate the analysis, the ranges of visibility below 5 km are consolidated into the category of bad visibility. Thus, we integrate eight levels into four levels (VeryGood, Good, Ordinary, Bad), as shown in Table 2. The membership function about
Classification of visibility.

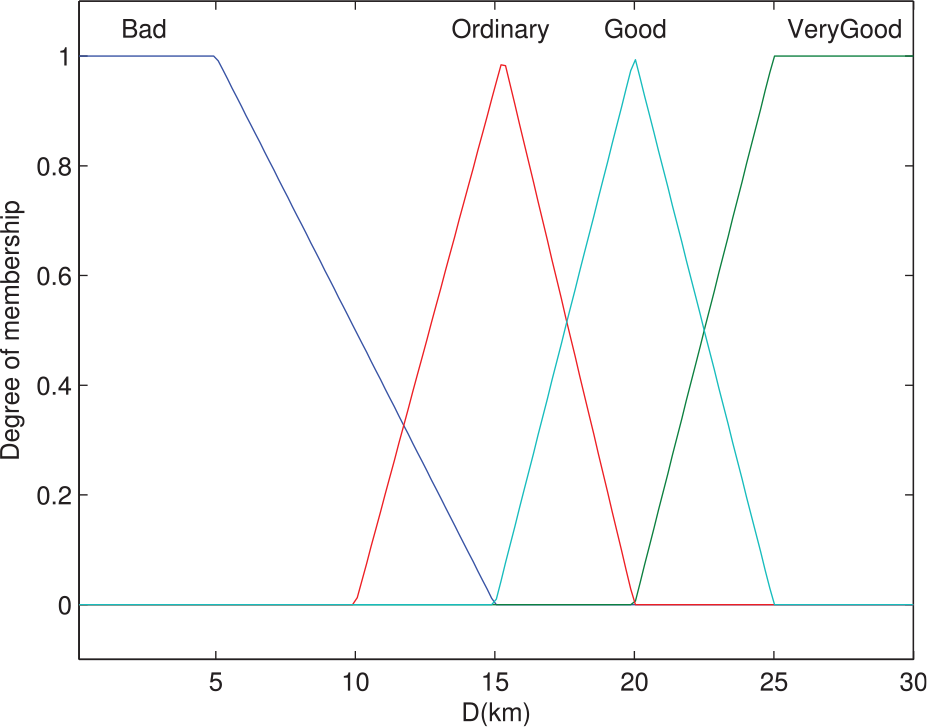
Membership function of visibility.
“IF-THEN” fuzzy rules set
In this article, we make the fuzzy rules according to the relationship between the four input variables (
The number of one-hop neighbor nodes reflects the traffic flow density. In view of traffic flow theory, the speed of vehicles decreases with the increase of traffic flow density. While the traffic flow density is small, the vehicles tend to be independent of each other and the speed of vehicles is large. However, it is also possible that the conservative drivers choose a low speed. Therefore, in the determination of fuzzy rules,
Poor visibility
The channel state is independent of the other three input variables. Thus, regardless of the values of other variables, the
The value of broadcast period When When When
Partial fuzzy rules.


Defuzzification
Defuzzification can transform the fuzzy inference results into specific numerical results. This process is realized by proper defuzzification method, based on the output membership function. There are many kinds of defuzzification methods, and the CoG method is adopted in this article. Zhang et al.
27
gave the detailed description about CoG method. According to the fuzzy rules, the output variable, that is, broadcast period

Output membership function.
Fuzzy inference process
This article used the fuzzy toolbox in MATLAB to establish the fuzzy logic inference system. We import the membership functions of input variables, membership function of output variable, and fuzzy rules into that system. When we input four variables mentioned above to the inference system, we can obtain corresponding output value of broadcast period. According to FL-ASB protocol, the broadcast period
T changes with different N
As shown in Figure 9, as

Graph of broadcast period changing over the number of one-hop neighbor nodes (
T changes with different V
As shown in Figure 10, as

Graph of broadcast period changing over vehicle speed (
T changes with different RSSI
As shown in Figure 11, as

Graph of broadcast period changing over RSSI (
T changes with different D
As shown in Figure 12, as
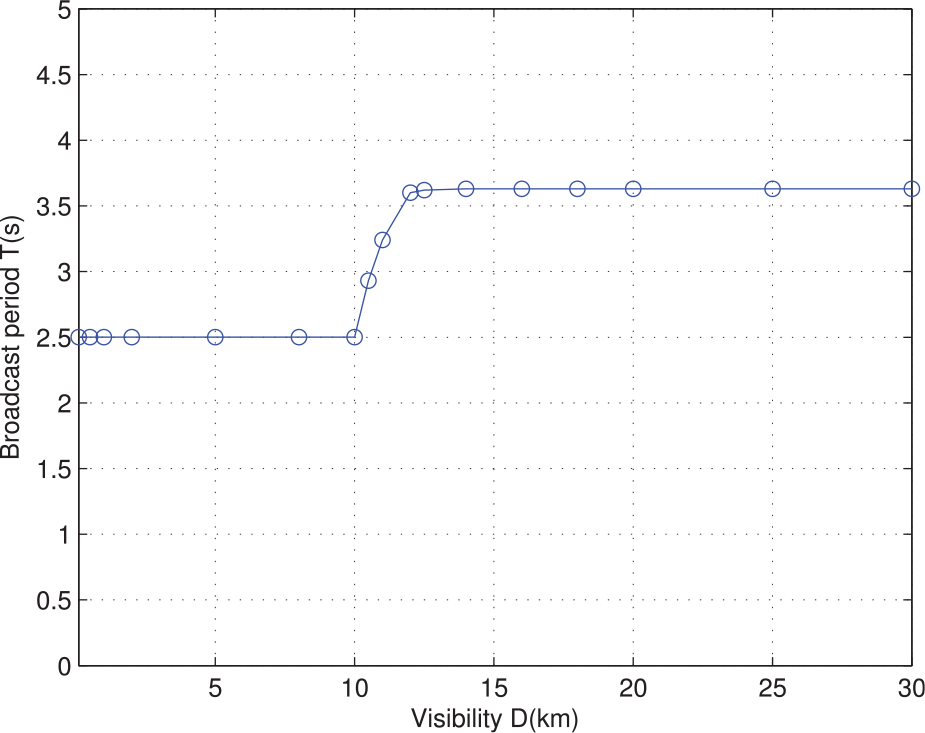
Graph of broadcast period changing over visibility (
In summary, through the fuzzy logic inference, the broadcast period
Simulation results and discussions
In this section, we will verify the performance of the FL-ASB protocol through simulations. The simulations are based on the following assumptions:
The bidirectional four-lane highway in this article is an ideal highway to meet the following conditions:
The width of lanes is between 3.75 and 4.50 m. In this article, we define the width of lanes is 3.75 m. All vehicles are cars. The drivers have good driving skills and obey the traffic rules. All vehicles are equipped with GPS and WAVE/DSRC equipment. The basic parameters of the vehicles are the same, such as acceleration, maximum speed, minimum speed. The communication range of vehicles is 300 m.
Mobility model and simulation parameters
In this article, in order to ensure the realness and reliability of broadcast protocol simulation results, we adopt VanetMobiSim 28 to simulate the vehicle following model in a bidirectional four-lane highway scenario with a vehicle speed of 120 km/h. After using the VanetMobisim software to execute the vehicle mobility simulation file in the format of .xml, a file in the format of .tcl will automatically be generated in the storage path. This .tcl file can be imported into the NS2 29 software through the “source” command to set the network topology and the corresponding vehicle mobility situation.
In this article, the simulator platform is NS2, which operated on the Ubuntu system installed in Vmware Workstation 10.0. For simulating the broadcast protocol, the C++ language is used to modify the corresponding Mac802_11Ext and WirelessPhyExt modules in NS2, according to the IEEE 802.11p protocol. The other simulation parameters are shown in Table 5.
Simulation parameters.

PSM: periodic safety message; RSSI: received signal strength index.
After the simulation process of using the NS2 software to execute the broadcast protocol, a trace file in the format of .tr can be automatically generated, which includes the packets transmission record during the execution of the broadcast protocol. By extracting the records in the .tr file, we can analyze the performance of our proposed broadcast protocol and compare with other related protocols.
Simulations and analysis
To verify the advantages of FL-ASB protocol, this section will compare FL-ASB with fixed-period single-hop broadcast protocol (i.e. FSB-0.05s and FSB-0.25s) and adaptive-period single-hop broadcast protocol ASB. 21 The performance index are network load ratio, delivery ratio, and average one-hop delay.
Network load ratio
The network load ratio is equal to the ratio of the number of PSM packets delivered in the network to the total number of packets delivered in the network. It is used to measure the condition that PSM messages occupy the network resources. Figure 13 shows the tendency of the network load ratio of each protocol with the increase of the number of vehicle nodes

Network load ratio comparison between FL-ASB and other protocols.
From Figure 13, we can see that the fixed-period single-hop broadcast protocol FSB-0 05s and FSB-0.25s have the highest network load ratio. This is because they cannot adaptively adjust the broadcast period according to the network density. The ASB protocol can adjust the broadcast period according to network density; therefore, its network load ratio is much lower than the FSB protocols. However, with the increase of the number of vehicle nodes, the network load ratio increases obviously. The FL-ASB protocol proposed in this article has optimized the statistical method of the number of neighbor nodes, based on the ASB protocol. As a result, the network load ratio of FL-ASB is less than that of ASB, and the network load ratio of FL-ASB is basically stable as the number of vehicles increases.
Delivery ratio
The delivery ratio is the ratio of the number of PSM packets received successfully to the total number of PSM packets transmitted in the network. It is used to measure the validity of the broadcast protocol. Figure 14 shows the tendency of delivery ratio of each protocol with the increase of the number of vehicle node

Delivery ratio comparison between FL-ASB and other protocols.
From Figure 14, we can see that the delivery ratio of FSB-0.05s, FSB-0.25s, and ASB show obvious downward trend with the increase of number of vehicle nodes. It is because that as the vehicle density increases, the broadcast period cannot be well adjusted, resulting in broadcasting packets frequently. Thus, packets collision increases and the delivery ratio decreases. The FL-ASB protocol proposed in this article can guarantee a high delivery ratio. On one hand, the FL-ASB protocol can adaptively adjust the broadcast period according to the number of vehicle nodes. Moreover, the FL-ASB protocol takes a wider range of considerations when calculating the number of one-hop neighbor vehicles. Thus, it takes into account more one-hop vehicle nodes and makes the broadcast period larger to decrease the packets collision probability. On the other hand, the FL-ASB protocol also considers the channel state. Adjusting the broadcast period according to different channel states also decreases the packet collision probability and increase the delivery ratio to a certain degree.
Average one-hop delay
Average one-hop delay means the time from a PSM packet being sent to being received in one hop, which is used to measure the timeliness of the broadcast protocol. Figure 15 shows the tendency of average one-hop delay of each protocol with the increase of the number of vehicle nodes

Average one-hop delay comparison between FL-ASB and other protocols.
From Figure 15, we can see that fixed-period single-hop broadcast protocol FSB-0.05s and FSB-0.25s have a higher average one-hop delay, and the average one-hop delay of FSB-0.05s is higher than that of FSB-0.25s. This is because the fixed-period single-hop broadcast protocols cannot adjust the broadcast period according to the number of vehicle nodes. When the vehicle density is small, it has a high delivery delay due to the low network connectivity. While the vehicle density is large, broadcasting packets frequently can lead to packet collisions and increase delay due to the reason that the broadcast period cannot be adjusted timely. The adaptive-period single-hop broadcast protocol ASB and FL-ASB both have low and stable average one-hop delay, because they can adaptively adjust the broadcast period according to the traffic density. In addition, the FL-ASB protocol proposed in this article has lower and more stable average one-hop delay than the ASB protocol. This is because the FL-ASB protocol optimizes the statistical method of the number of neighbor nodes on the basis of the ASB protocol and takes the channel state and other factors into consideration. Therefore, the FL-ASB protocol has a better adaptive performance of broadcast period and can effectively decrease the collision probability caused by frequent packet transmission and decrease the delay.
From the analysis above, the FL-ASB protocol has shown a better performance in the network load ratio, average one-hop delay, and delivery ratio. What is more, in addition to the traffic density, the FL-ASB protocol also considers the channel state and weather condition. Thus, the FL-ASB protocol has better scalability and adaptability compared with other protocols.
Conclusion
In this article, we design an adaptive-period single-hop broadcast protocol based on fuzzy logic theory. We take into account various factors which could affect broadcast period, such as the number of one-hop neighbor nodes, vehicle speed, received signal strength, and visibility. Furthermore, we analyze the impact of various factors on the single-hop broadcast period. Using the fuzzy logic inference method, we realize the adaptive changes of the PSMs broadcast period. Finally, through simulations, we verify that our proposed FL-ASB protocol has shown a better performance in network load ratio, average one-hop delay, and delivery ratio. In addition, the FL-ASB protocol has better scalability and adaptability compared with other protocols. There are still open issues in the future. First, the design of broadcast protocol should accord with the actual traffic environment. In this article, we have made some assumptions to simplify the problem. Second, the research should take into account more complex road scenario. How to design a broadcast protocol in urban scenario needs to be investigated.
Footnotes
Handling Editor: Carlos Calafate
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article is supported by the State Key Laboratory of Rail Traffic Control and Safety (contract no. RCS2016ZT015), Beijing Jiaotong University. And it is supported in part by the Chinese National Programs for High Technology Research and Development 863 project (no. 2015AA016005).