
Abstract
It is difficult to answer the problem whether the range rate measurement should be adopted to track a target in a tracking scenario. A practical adaptive nonlinear tracking algorithm with the range rate measurement is proposed, which avoids this problem and achieves good accuracy of target state estimation. First, three popular nonlinear filtering algorithms only with the position measurement are surveyed. Second, three popular nonlinear filtering algorithms with the position and range rate measurements are surveyed. Then, a novel tracking algorithm with range rate measurement is proposed based on the cumulative sum detector and the above two kinds of nonlinear algorithms. The results of simulation experiment demonstrate that the range rate measurement could reduce accuracy of the target state estimation in mismatch tracking scenarios. The results of simulation experiment also verify that the performance of proposed algorithm is better than the current state and the art interacting multiple-model algorithm and can well follow the state estimation output of the measurement equation matching the tracking scenario.
Keywords
Introduction
Target tracking algorithm with the range and bearing measurements from the radar is widely applied in practice. Normally, because of the range and bearing measurements in the radar coordinates and the target state in the Cartesian coordinates, the target tracking algorithm is nonlinear. At present, many nonlinear filtering algorithms are applied to solve this problem, such as the extended Kalman filter (EKF) algorithm, 1 the unscented Kalman filter (UKF) algorithm, 2 the cubature Kalman filter (CKF) algorithm, 3 the unbiased converted measurement Kalman filter (UCMKF) algorithm, 4 and the decorrelated unbiased converted measurement Kalman filter (DUCMKF) algorithm. 5 The EKF first widely used in this tracking problem uses the Taylor expansion of the measurement function to linearly approximate the nonlinear measurement function. If the nonlinearity of measurement function is strong, the effect of linear approximation is not ideal. The UKF and the CKF can be classified as the generalized Gaussian filtering. 6 The algorithm assumes that the state estimation and prediction obey the Gaussian distribution, and the numerical integration method is used to compute the mean and the covariance of the assumed Gaussian density function. Compared with the EKF, the UKF and the CKF have the advantages of not requiring differential operation or calculating the Jacobian matrix, but the disadvantage is that more computational steps are needed. The UCMKF and the DUCMKF are a class of measurement conversion algorithm whose idea is first to convert the raw radar measurement into Cartesian coordinate system before filtering and then use the linear Kalman filter (KF). 7 Lerro and Bar-Shalom 4 claim that the performance of the UCMKF is better than that of the EKF in the mixed coordinate system. On the basis of the UCMKF, the DUCMKF replaces the raw measurement from the radar with the state prediction from the filtering to eliminate the correlation between the measurement error covariance estimation and the measurement noise and then the estimation bias is reduced. However, if the state estimation error is large or the model mismatch occurs, the new prediction bias will be introduced due to the use of the state prediction.
In addition to range and bearing measurements called position measurement, the Doppler radar can also obtain the range rate measurement. Recently, the range rate measurement is used to estimate the parameters of target motion, because the range rate measurement includes the velocity information. An estimation method of turn rate is proposed by combining the range rate measurement and the coordinate point measurement for a fast curvilinear target. 8 In the passive location problem, the high-precision range rate measurement from single satellite using third-order Taylor expansion ensures the accuracy of location. 9 Harris and Whitcomb 10 report an observation model for range rate measurement with a delayed-state EKF to estimate the state of underwater vehicles in the communication and navigation. The modified approach of probability weight in the interacting multiple-model (IMM) is developed by the normal acceleration statistics derived from the range rate. 11 In a multistatic radar, range and range rate measurement from multiple bistatic radars are adopted to determine the targets velocity and location. 12 The kinematics and geometry relationships between range rate and target state have been developed in many applications gradually. In the above works, only basic nonlinear filters, such as the EKF, the UCMKF and the CKF, are used for the nonlinear estimation with range rate measurement. The strong nonlinear relationship between the state and the range rate measurement is ignored. Specially, the results of target tracking with the position and range rate measurements obtained by the EKF, the UKF, the CKF, and the UCMKF directly have potential inconsistencies and deviations. 13
In recent years, Lei and Han, 14 Jiao et al., 15 and Bordonaro et al. 16 propose several filtering algorithms with range rate measurement to reduce the stronger nonlinearity of the measurement equation containing the position and range rate measurement. The sequential unscented Kalman filter (SUKF) algorithm, the sequential extended Kalman filter (SEKF) algorithm and the converted measurement Kalman filter with range rate (CMKFRR) algorithm are accepted for the better stability and higher accuracy of state estimation than others. The SUKF 14 converts the position measurement into Cartesian coordinates and remains the raw range rate in the nonlinear measurement equation. Then, perform the KF for the converted position measurement and perform the UKF for the raw range rate measurement sequentially. The SEKF 15 converts the position measurement into Cartesian coordinate system and replaces the raw measurement with the pseudo-measurement that is the product of range and range rate in order to reduce the nonlinearity of the measurement equation. Then, perform the KF for the converted position measurement and perform the second-order EKF for the pseudo-measurement sequentially. The sequential filtering methods with the conversion measurement algorithm have better tracking performance than those of standard UKF and EKF. Bordonaro et al. 16 propose the CMKFRR that converts the range, bearing, and range rate measurements to the position and velocity in Cartesian coordinate system. However, the CMKFRR uses the cross-range rate, which needs the prior knowledge to model the expected probability distribution of cross-range rate measurement because the cross-range rate cannot be observed.
Although the above SUKF, SEKF, and CMKFRR can effectively reduce the nonlinearity of target tracking with the range rate measurement, it is not feasible to use the range rate measurement in any tracking scenario to improve accuracy of target state estimation. In other words, in some scenarios, the position measurement can be used to achieve the higher accuracy of target state estimation than the position and range rate measurements; in other scenarios, the position and range rate measurement are better. In order to obtain better accuracy of state estimation, it is necessary to distinguish where the position measurement should be used and where the position and range rate measurements should be used. However, this boundary is difficult to determine, because the accuracy of state estimation is influenced not only by the nonlinear measurement equation, also by the true movement of target, measurement noise, filtering algorithm, target motion model, and so on. In order to avoid the decrease in the target tracking performance due to the improper use of range rate measurement, a practical adaptive tracking algorithm with the range rate measurement based on the cumulative sum (CUSUM) detector is proposed in this article to achieve the good accuracy of target state estimation, which is close to the best performance of tracking algorithm with single measurement equation in different scenarios.
The content of this article is designed as follows. In section “Formulation of the problem,” the background of the problem is described and the measurement equation containing the position measurement and the measurement equation containing the position and range rate measurements are described. In section “Nonlinear tracking algorithms with the position measurement,” the popular nonlinear tracking algorithms only with the position measurement, namely, the UKF, the UCMKF, and the DUCMKF, are surveyed. In section “Nonlinear tracking algorithms with the position and range rate measurement,” the popular nonlinear tracking algorithms with the position and range rate measurements, namely, the SUKF, the SEKF, and the CMKFRR, are surveyed and the performance of the algorithms described in section “Nonlinear tracking algorithms with the position measurement” and the algorithms described in this section are compared by the simulation experiment. In section “A practical adaptive nonlinear tracking algorithm with the range rate measurement,” a practical adaptive nonlinear tracking algorithm with the range rate measurement is proposed and its performance is verified. In section “Conclusion and future works,” the conclusions and future works are given.
Formulation of the problem
For a target in two-dimensional (2D) plane, a coordinate decoupled dynamic model of the target is described in Cartesian coordinate system

where
When the position measurement only is adopted to track a target, the measurement vector is denoted as

where

where

where
When the position and range rate measurement are adopted to track a target, the measurement vector is denoted as

where

where

where
Nonlinear tracking algorithms with the position measurement
When the position measurement is used to tracking a target, the target state equation and measurement equation are formulas (1) and (2), respectively. For the target tracking problem, the current popular methods are the UKF, the UCMKF, and the DUCMKF.
The UKF algorithm
The UKF is an approximate filtering algorithm based on the unscented transformation. 18 The filtering distribution is assumed to be a Gaussian distribution in the UKF

where
Prediction
Form the sigma points

where
Propagate the sigma points through the state transform matrix

Compute the predicted mean

where the weights

where
Update
Form the sigma points
Propagate sigma points through the measurement function

Compute the predicted mean

Compute the filter gain

The advantage of the UKF over the EKF is that the UKF is not based on a linear approximation at a single point, but uses further points in approximating the nonlinearity. The unscented transform is able to capture the higher order moments caused by the nonlinear transform better than Taylor series–based approximations. 19 The UKF can be classified as a special kind of Gaussian filtering, which includes the Gauss–Hermite Kalman filter and the CKF. The UKF performance is close to the Gauss–Hermite Kalman filter and the CKF. Although the mean estimate of the UKF is exact for polynomials up to third order, the covariance computation is only exact for polynomials up to the first order. 19
The UCMKF algorithm
The conversion measurement Kalman filter (CMKF) algorithm is a common tracking algorithm for the target state in Cartesian coordinate system and the measurement in the polar coordinate system. The CMKF has two bias sources. The first source is the conversion bias. If the bias conversion measurement is adopted in the KF, it will lead to performance degradation. The UCMKF is proposed in Longbin et al. 20 to eliminate the bias by multiplicative compensation. The UCMKF with multiplicative compensation is as follows

The corresponding conversion measurement covariance matrix is

The converted measurement
The DUCMKF algorithm
The DUCMKF based on the UCMKF replaces the current measurement with the one-step state prediction to eliminate the correlation between the conversion measurement covariance matrix and measurement noise and then the estimation bias is reduced. Like the UCMKF, formula (17) is used to perform the unbiased converted measurement. The range and bearing measurement predictions are denoted as

The variables

The decorrelated conversion measurement error covariance matrix is denoted as

The DUCMKF can be obtained through combining the converted measurement
Nonlinear tracking algorithms with the position and range rate measurement
When the position and range rate measurements are used to tracking a target, the target state equation and measurement equation are formulas (1) and (5), respectively. For the target tracking problem, the current popular methods are the SEKF, the SUKF, and the CMKFRR.
The SEKF algorithm
The SEKF replaces the raw range rate
Conversion measurement
Apply formula (17) to convert the position measurement, and the conversion formula of pseudo-measurement is

The corresponding covariance matrix of conversion measurement is


The decoupled method in Jiao et al. 15 is used to decouple the position and the pseudo-measurements.
Sequential filtering
Time update filtering estimation

Position measurement updating filtering estimation
Pseudo-measurement updating filtering estimation

where
The SEKF adopts the pseudo-measurement and indeed reduces the nonlinearity of the original measurement function. However, if the range is far and the range rate is large, the multiplication of them will give a high gain to the pseudo-measurement noise, which will lead to the decrease in the tracking performance and even the divergence.
The SUKF algorithm
The SUKF directly adopts the raw range rate measurement to perform the sequential filter. First, the KF is used for the converted position measurement and then the UKF is used for the raw range rate measurement. The steps of SUKF are as follows.
Conversion measurement
Apply formula (17) to convert the position measurement, and remain the raw range rate measurement, that is,

In order to do sequential processing, it is necessary to decouple the position measurement and the range rate measurement, and the decoupling method is the same as the SEKF.
Sequential filtering
Time update filtering estimation with formula (24).
Position measurement updating filtering estimation with formula (25).
Range rate measurement updating filtering estimation.
Form the sigma points

Calculate the mean
where the weights

to predict the measurement

Compute the predicted measurement mean
Output the state estimation

Although the mean estimate of the SUKF is the same as that of the SEKF, the covariance computation of the SEKF is exact for polynomials up to the third order. Besides, the SUKF needs more computation steps to deal with the nonlinear measurement function of the range rate.
The CMKFRR algorithm
The SEKF and the SUKF are the sequential filtering methods, and their measurement equations still contain nonlinear components. The CMKFRR directly uses the KF for the position and range rate measurement. The algorithm converts the range, bearing, and range rate measurements into Cartesian coordinate system and takes the KF of information form. The steps of CMKFRR are as follows.
Conversion measurement


where

Then, the measurement matrix is
The KF of information form

where


The matrix

where
The CMKFRR introduces the unknown cross-range rate
Performance of tracking algorithms
The simulation experiment is to demonstrate that the performance of the UKF, the UCMKF, the DUCMKF, the SEKF, the SUKF, and the CMKFRR algorithms. Besides, the posterior Cramér–Rao lower bound (PCRLB) 21 for the position measurement called PCRLBR and the PCRLB for the range, bearing, and range rate measurements called PCRLBRR are calculated. Three target tracking scenarios are set up artificially in the simulation experiment. The mean square error (MSE) is used to measure the accuracy of state estimation. The MSE for target position and the MSE for target velocity are defined as, respectively

where
Scenario 1: the initial position of target is
Scenario 2: the initial position of target is
Scenario 3: the initial position of target is
The standard deviation of range rate measurement is
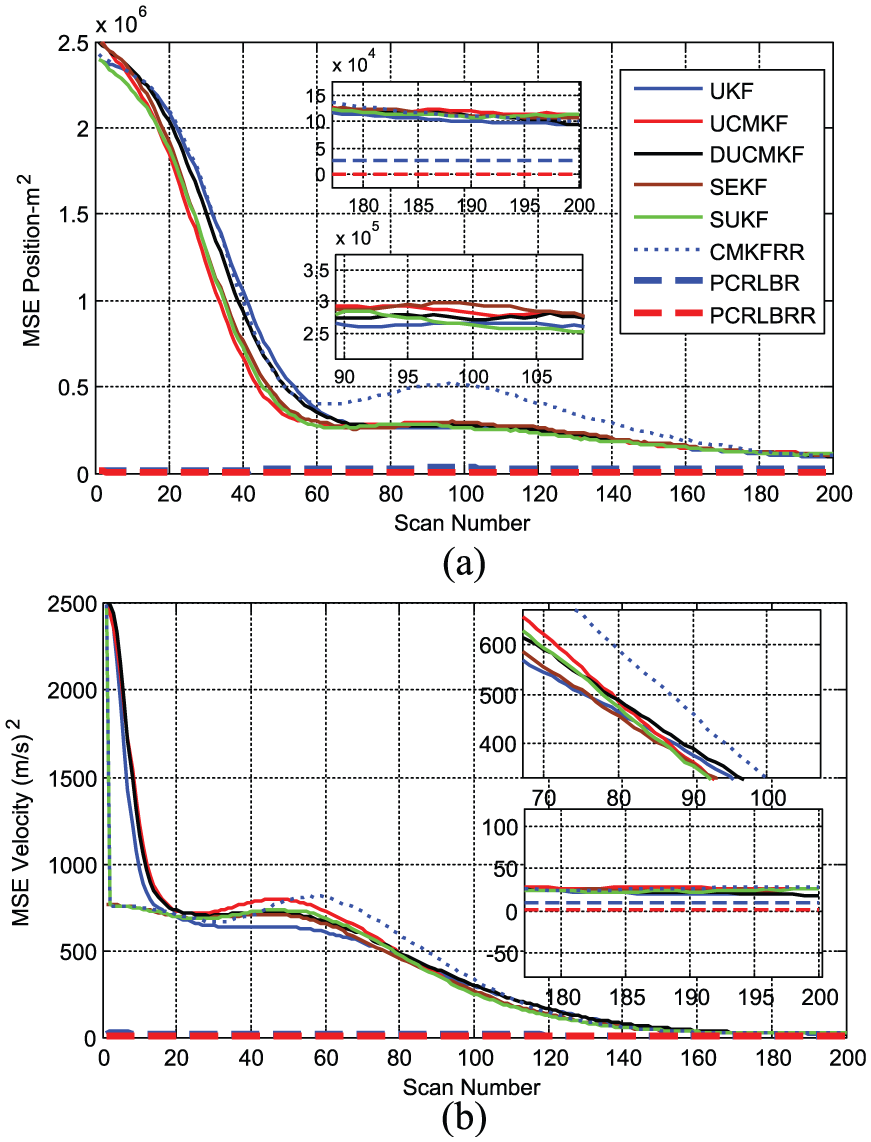
Figures 1–3 show the MSE for position and velocity with 1000 Monte Carlo simulations in the scenarios 1–3, respectively. The PCRLBRR is lower than the PCRLBR in each tracking scenario. Thus, in theory, introducing the range rate measurement has the potential to improve the accuracy of target state estimation. In Figure 1, the MSEs of the SEKF, the SUKF, and the CMKFRR for position and velocity are obviously better than those of the UKF, the UCMKF, and the DUCMKF. The results demonstrate that the use of range rate measurement indeed improves the accuracy of state estimation in the tracking scenario 1. In Figure 2, after about 70s, the MSEs of all algorithms for position and velocity are interwoven together, but the CMKFRR, which demonstrates that the use of range rate measurement, has little influence on the accuracy of state estimation in the tracking scenario 2. In Figure 3, the MSEs of the SEKF, the SUKF, and the CMKFRR for position and velocity are lower than those of the UKF, the UCMKF, and the DUCMKF during the initial tracking period. However, the MSEs of the SEKF, the SUKF, and the CMKFRR for position are higher than those of the UKF, the UCMKF, and the DUCMKF during the middle and late tracking periods. It demonstrates that the use of range rate measurement is not always beneficial for tracking task.

MSE for position and velocity with 1000 Monte Carlo simulations in the scenario 1: (a) MSE for position and (b) MSE for velocity.
MSE for position and velocity with 1000 Monte Carlo simulations in the scenario 2: (a) MSE for position and (b) MSE for velocity.

MSE for position and velocity with 1000 Monte Carlo simulations in the scenario 3: (a) MSE for position and (b) MSE for velocity.
A practical adaptive nonlinear tracking algorithm with the range rate measurement
The CUSUM detector based tracking algorithm with range rate
It can be seen from the results of simulation experiment in section “The CMKFRR algorithm” that the range rate measurement cannot improve the accuracy of the tracking algorithm in the all tracking scenarios. In some tracking scenarios, for example, the tracking scenarios of Lei and Han, 14 Jiao et al., 15 and Bordonaro et al. 16 and the scenario 1 in section “The CMKFRR algorithm,” the use of the range rate measurement indeed improves the state estimation accuracy. However, before performing the tracking algorithm, as the target state is stochastic and the tracking performance is influenced by the true movement of target, measurement noise, filtering algorithm and target motion model, and so on, it is difficult to judge whether the range rate measurement is beneficial to the target tracking task. In essence, this problem can boil down to the problem of whether the measurement model in the target tracking algorithm matches the current tracking scenario. When the measurement model with range rate is matched, the state estimation accuracy of the target can be improved; otherwise, it cannot. The famous IMM algorithm 22 is used in the field of tracking to solve the problem of model mismatch. The IMM algorithm models the switching between the models as Markov random process, and realizes the soft switching between the models. The IMM aims at the mismatch between the target motion state model and the real target motion, and can solve the maneuvering target tracking well. 23 The IMM may be applied directly to the mismatch problem of the measurement models in this article. However, unlike the target maneuver, the characteristics of the nonmaneuvering tracking scenario have the spatio-temporal stability which the IMM is not suitable. 24 Besides, the performance of IMM is affected by the initial model probability and the model transfer probability that need to be set manually based on prior information, while we does not have such a priori information for the measurement model.
Except the IMM, the other to solve the model mismatch problem is the decision-based method, 25 which mainly executes a single model in target tracking while a detector is performed to detect whether the current model matches the true motion. Once the model mismatch is detected, it will immediately switch the model. This hard switching method is more suitable for the mismatch between the measurement model and the tracking scenario, because the fusion between two types of measurement models with inclusion relationship in this article is not needed during the tracking process. In the decision-based method, a detector should be designed to detect the mismatch of the measurement model. The current-decision-based method includes the measurement-residual (MR)-based chi-square detector algorithm, the generalized likelihood ratio (GLR) test detector algorithm, the marginalized likelihood ratio (MLR) detector algorithm, the cumulative sum–based detector (CUSUM) algorithm. 26 The MR, the GLR, and the MLR are a class of batch detection algorithms, and CUSUM is a kind of sequential detection algorithm. Although the CUSUM has been put forward for decades for the change-point detection, it has recently been emphasized in theory and application. Cho and Fryzlewicz 27 propose the sparsified binary segmentation (SBS) algorithm which aggregates the CUSUM statistics by adding only those that pass a certain threshold. An adaptive CUSUM is applied to a real-time detection framework for false data injection in smart grid networks. 28 The CUSUM change-point detection technology is applied to the stationary evaluation method of univariate time series. 29 A nonparameter CUSUM is designed for quickest detection of parameter changes in stochastic regression. 30 The CUSUM is more appropriate in the target tracking problem discussed in the article, because the measurement vector of radar comes according to the time sequence. Therefore, we use the CUSUM to detect the measurement mismatch in this article.
The standard CUSUM detector is used for maneuvering target tracking, which is specifically expressed as
Decision rules are as follows:
Accept
Continue detecting
where
According to the standard CUSUM detector, the modified CUSUM detector for the measurement mismatch detection in this article is designed as follows

Decision rules are as follows:
If
If
where
Based on the modified CUSUM detector, a practical tracking algorithm with range rate measurement is proposed in this article, which is the CUSUM detector based tracking algorithm with range rate measurement, called CUSUM-RR. The algorithm is described as follows:
Step 1: initialization.
Set up
Step 2: parallel filtering.
Perform one of the filter algorithms described in section “Nonlinear tracking algorithms with the position measurement” and one of the filter algorithms described in section “Nonlinear tracking algorithms with the position and range rate measurement” to obtain the variables
Step 3: calculation likelihood function.
Assume that

where


Step 4: detection the measurement mismatch.
Let


Then

If
Output the tracking result
Step 5: time updating.
Let
For the CUSUM-RR algorithm, two tracking algorithms with two measurement models are performed at the same time, respectively, and the state estimation which has the higher accuracy is outputted. The CUSUM-RR algorithm could adaptively choose the measurement model in the different tracking scenarios, which does not depend on the prior information to choose the measurement model artificially, to avoid the measurement mismatch. The threshold value

where
Performance of CUSUM-RR algorithm
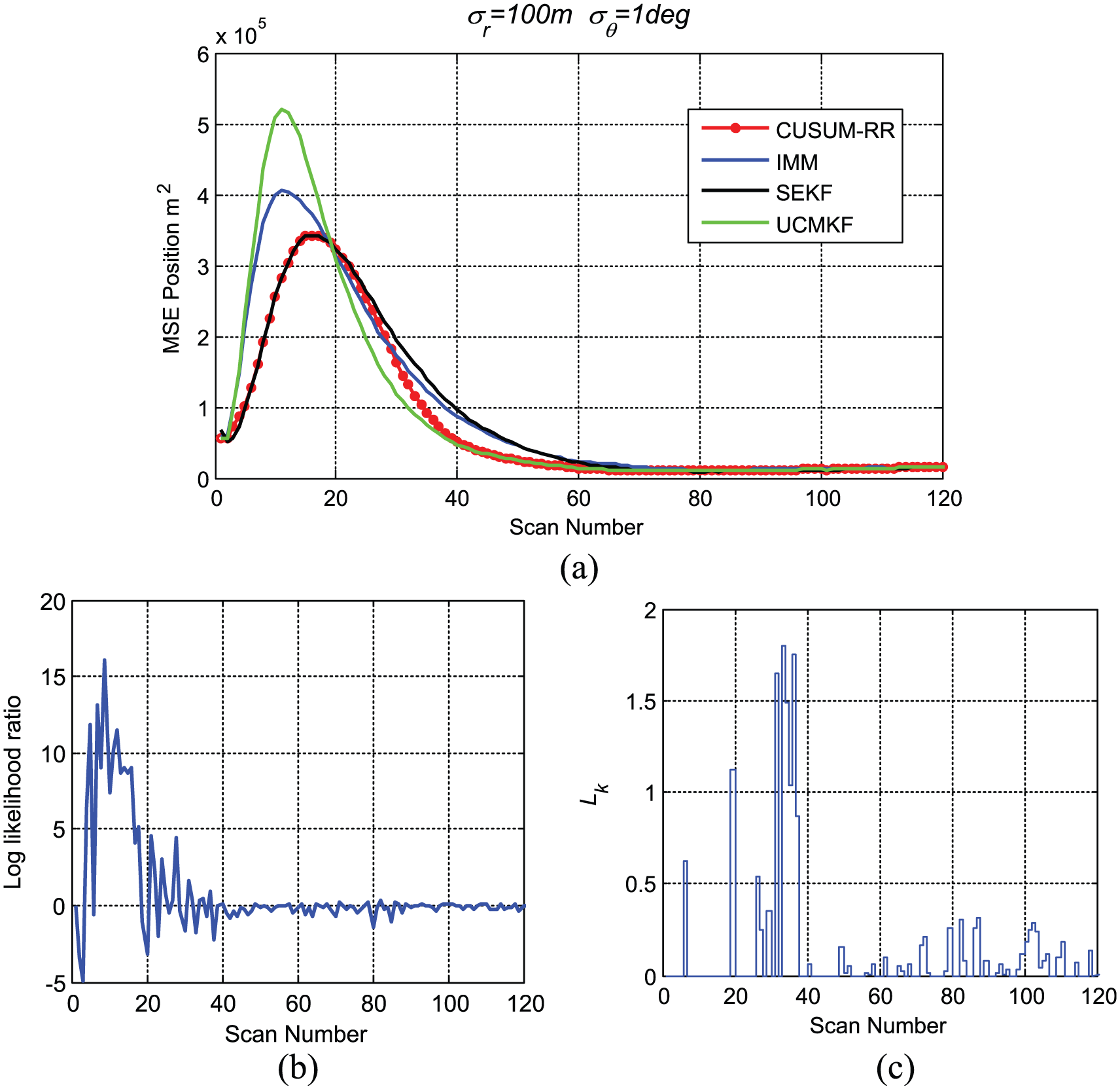
The purpose of this section is to demonstrate the performance of the proposed CUSUM-RR algorithm. The SEKF and UCMKF are selected as the filters of CUSUM-RR according to two measurement equations. In the simulation experiment, the CUSUM-RR is compared with the SEKF, UCMKF, and IMM. The filters of IMM also consist of the SEKF and UCMKF with two measurement models, respectively. The target motion parameters are the same as the tracking scenario 3 in section “The CMKFRR algorithm.” We set three position measurement standard deviations
The MSEs of CUSUM-RR, IMM, SEKF, and UCMKF for position with 1000 Monte Carlo simulations are shown in Figures 4(a)–6(a). During the initial tracking period, as the MSE of SEKF is the lower than that of UCMKF, the Boolean variable changes from

The results of position measurement standard deviation
The results of position measurement standard deviation

The results of position measurement standard deviation
The parameter Lk in the CUSUM detector at 500th Monte Carlo simulation experiment is shown in Figure 4(c)–6(c). From Figures 4(b)–6(b), during the initial tracking period, the log-likelihood ratio far exceeds the threshold value 2. Thus, in Figures 4(c)–6(c), the value of Lk is almost 0 in the corresponding time period. In the middle tracking period, the outputted state estimation of CUSUM-RR changes between the SEKF and UCMKF, because the log-likelihood ratio fluctuates on the zero line. This is why the MSE of CUSUM-RR does not immediately follow the MSE of the UCMKF when the MSE of the UCMKF is lower than the MSE of the SEKF in the middle tracking period with 1000 Monte Carlo simulation experiment. In general, the proposed CUSUM-RR can effectively solve the problem of measurement model mismatch and provides an application path for the tracking target with range rate measurement in practice. However, the disadvantage of CUSUM-RR is that CUSUM-RR needs about two times the amount of calculation than that of SEKF or UCMKF. The CUSUM-RR also cannot obtain the higher accuracy of state estimation given SEKF and UCMKF because of the hard decision. Although the ideal MSE curves of CUSUM-RR should always follow the lower between the MSE curves of SEKF and UCMKF, due to the interference of random noise, the time of CUSUM mismatch detection is not the same in each Monte Carlo simulation. In other words, the detection delay could not been avoided. The value of threshold
Conclusion and future works
The use of range rate measurement may not improve the target tracking performance, as the special tracking algorithm performance is related to the special tracking scenario. However, since the accuracy of state estimation is affected by many other factors besides the nonlinear measurement equation, it is difficult to establish the application relationship between the tracking scenario and measurement equation. In this article, the nonlinear filtering algorithms which only use the position measurement and the nonlinear filtering algorithms which use position and range rate measurement are surveyed. The performances of these algorithms are compared by simulation experiments. The experimental results demonstrate that the range rate measurement cannot improve target state estimation accuracy in any tracking scenario. In order to solve this problem, this article proposes a practical tracking algorithm with adaptive ability based on the CUSUM detector, that is, the CUSUM-RR algorithm. The algorithm can achieve good accuracy of state estimation in different tracking scenarios, which avoids the performance degradation due to the misuse of measurement equations. The decision-based algorithm prevents the bad fusion between multiple models and the interference of random noise through setting the appropriate threshold value. The simulation results demonstrate that the CUSUM-RR can better follow the state estimation corresponding to the measurement equation matching the tracking scenario and then has a lower MSE than the IMM.
In the future works, the nonlinear tracking algorithm with range rate measurement should be studied more deeply to improve the accuracy of state estimation. The particle filter algorithm may be more suitable for the strong nonlinear measurement equation. If the particle filter is used as a filter of CUSUM-RR, it is necessary to redefine the likelihood ratio to design an effective CUSUM detector. The threshold setting of the CUSUM detector should be further studied to ensure a more rapid detection for the measurement model mismatch. For the maneuvering target tracking problem, the CUSUM-RR proposed in this article cannot be applied directly. The strategy is to add an additional CUSUM detector to detect the target maneuver, or to use the CUSUM-RR as the sub-filter of the IMM. One of the future research directions is to design a composite CUSUM detector by exploring the relationship between range rate measurement and factors involved in the target tracking. The accuracy of angular velocity and normal acceleration also could be improved by the range rate measurement and the state estimation with the CUSUM-RR. In the following study, it is of importance to develop the method of fusing the range rate measurements from multiple Doppler radars in sensor networks to solve the problems of multiple target tracking and recognition.
Footnotes
Handling Editor: Janos Botzheim
Author’s Note
The owner of the fund is the author Haiyan Yang.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the National Natural Science Foundation of China (61472441).