
Abstract
Stabilization and learning are imperative to the high-performance feedback control of nonlinear systems. A dual adaptive robust control (DARC) scheme is proposed for nonlinear systems with model uncertainties to achieve a desired level of performance. Only the output of the nonlinear system is accessible in this work, all the states and parameters are learned online. Firstly, the DARC uses the prior physical bounds of systems to design a discontinuous projection with update rate limits which confines the bounds of parameter and state estimation. Then robustness of the nonlinear system can be guaranteed by the deterministic robust control (DRC) method. Secondly, a dual adaptive estimation mechanism (DAEM) is developed to learn the unknown parameters and states of systems. One part of the DAEM is the bounded gain forgetting (BGF) estimator, which is developed to handle inaccurate parameters and parametric variations. The other is the adaptive unscented Kalman filter (AUKF) synthesized for state estimation. The AUKF contains a statistic estimator based on the maximum a posterior (MAP) rule to estimate the unknown covariance matrix. Finally, simulation results illustrate the effectiveness of the suggested method.
Introduction
Performant feedback control of nonlinear systems is impeded by inaccurate dynamical models. To improve the performance of nonlinear systems, the estimation of parameters and states are heavily studied by researchers.1–4 Adaptive control is a well-known technique for the online estimation of parameters.5–8 Also, many approaches have been developed for the state estimation of nonlinear systems, especially the nonlinear Kalman filter.9–11 However, simultaneous estimating the parameters and states of nonlinear systems is still a challenging problem. The conventional approach, such as extended Kalman filter (EKF) and extended Luenberger observer, is simply linearizing the nonlinear model and building an augmented state system with parameters such that the traditional linear method can be applied to the estimation of the augmented states.12–14 Nevertheless, these methods suffer from the drawbacks of heavy computation of the Jacobi matrix and limited precision of the first order.15,16 With higher accuracy, the unscented Kalman filter (UKF) is implemented for parameter and state estimation of nonlinear systems.17,18 Both the joint UKF and dual UKF methods are under the framework of Kalman, which needs exact knowledge of prior statistics. In practice, statistics are hard to know and often inaccurate. Thus the performance of estimation might be degraded or even diverge. 19 To avoid performance degradation, many different types of adaptive unscented Kalman filter (AUKF) with statistic estimator are applied to industrial areas.20,21 Though the adaptive mechanism of AUKF is effective, this method assumes that parameters are constants disturbed by small Gaussian noises which are usually not satisfied. The AUKF with Gaussian distribution assumptions also has a limited tracking capability of parameters, but the actual operating environment for nonlinear systems is complex and parameters are usually time-varying. This work integrates the bounded gain forgetting (BGF) estimator 1 and AUKF to form a dual adaptive estimation mechanism (DAEM). The bounded gain forgetting (BGF) estimator with parameter tracking ability while avoiding adaptation gain unboundedness is designed for parameter estimation. Simultaneously the AUKF method is used for state estimation based on the nonlinear model updated by BGF. The proposed DAEM can acquire a precise estimation of parameters and states even in presence of parametric variations.
Concurrent learning and stabilization is always a critical ability of nonlinear systems.22–24 As a model learning methodology, the DAEM can improve the performance of control systems by adjusting the feedback control law. However, this will bring the same weaknesses as adaptive control, poor transient performance, and vulnerability to external disturbances. Therefore, a novel control policy that retains the learning ability and overcomes the non-robustness of DAEM must be developed. Deterministic robust control (DRC)25,26 has been widely used in the control of nonlinear systems because of its capability to achieve not only robust stability but also robust performance. However, the design conservativeness of DRC suffers from poor steady-state accuracy. Both the DAEM and DRC method have their own benefits and limitations. An adaptive robust control (ARC) framework with learning ability while retaining the robustness of the system has been developed. 22 This paper utilizes the ARC framework to construct a dual adaptive robust control (DARC) for nonlinear systems to bridge the gaps between DRC and DAEM. Unlike conventional ARC, both state and parameter are learned online. Moreover, the state estimation error has also been taken into account for the stability of the system. The poor transients and non-robust performance of DAEM are superseded by the guaranteed transients and robust performance due to leveraging the DRC philosophy. Owing to the learning power of DAEM, the poor steady-state performance of DRC is replaced by an excellent final tracking accuracy. The proposed DARC approach preserves the merits and overcomes the limitations of DAEM and DRC. Furthermore, the ARC framework utilizes the backstepping technique to ensure the stability of the closed-loop system. However, the derivate signals in backstepping increase the computation burden heavily. 27 For high-order nonlinear systems, the calculation of derivatives becomes prohibitive. Therefore, the proposed DARC employs the command filter technique 28 to relieve the calculation complexity. The computational complexity of DARC reduced significantly when compared to taditional ARC algorithm.
This work contributes to a new dual adaptive robust control scheme of nonlinear systems that achieves high-performance feedback control. This is achieved by:
A DAEM method, which intelligently integrates BGF estimator and AUKF, is proposed to estimate the unknown states and parameters simultaneously.
In conventional ARC control,29,30 the states of the system have assumed known or the state estimation error has been ignored for proving the stability of the whole closed-loop system. This work has taken both state and parameter estimation errors into the consideration. The DAEM has been brought into the ARC framework to form a novel DARC method. The stability of the whole system has been proved by the Lyapunov method. In addition, asymptotic stability can be achieved under specific conditions.
The proposed DARC combine the command filter technique into the design procedure to avoid heavy computation of the partial derivatives of virtual control law in the backstepping design.
The rest of the work is organized as follows. Problem formulation is done carefully in section Problem formulation. In section Dual adaptive robust control, the DARC control law, which ensures stability while learning, and the learning mechanism DAEM are formulated. In section Simulation example, a second-order nonlinear system with uncertainties is simulated with different scenarios and the results show the effectiveness of the DARC method. Section Conclusion concludes this work.
Problem formulation
This work considers nonlinear systems that can be transformed to the form below.
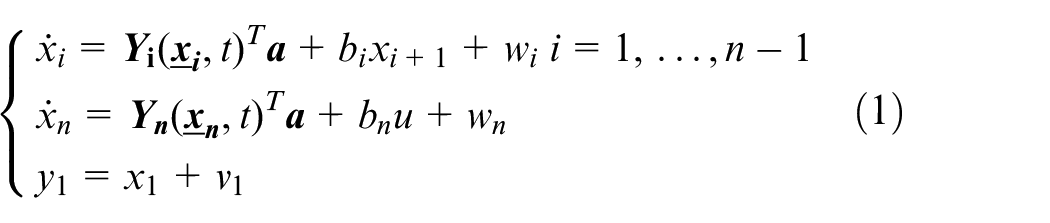
where
Let
The following practice assumptions are presented:
Assumptions 1. The unknown parameter vector
Assumptions 2. The non-parametric uncertainties of the nonlinear system
Assumptions 3. The reference trajectory
Assumptions 4. The non-parametric uncertainties of the nonlinear system
Dual adaptive robust control
The dual adaptive robust control policy proposed in this work can be seen in Figure 1. The parameters and states are estimated by the dual adaptive learning mechanism consisting of the BGF estimator and the AUKF method. Then a discontinuous projection is designed for confining the parameter and state in a convex region which is constructed with the prior knowledge of the bounds of parametric and non-parametric uncertainties. With the projection-type adaption law for parameter and state estimation, the stability of the whole system can be ensured by leveraging the DRC philosophy.
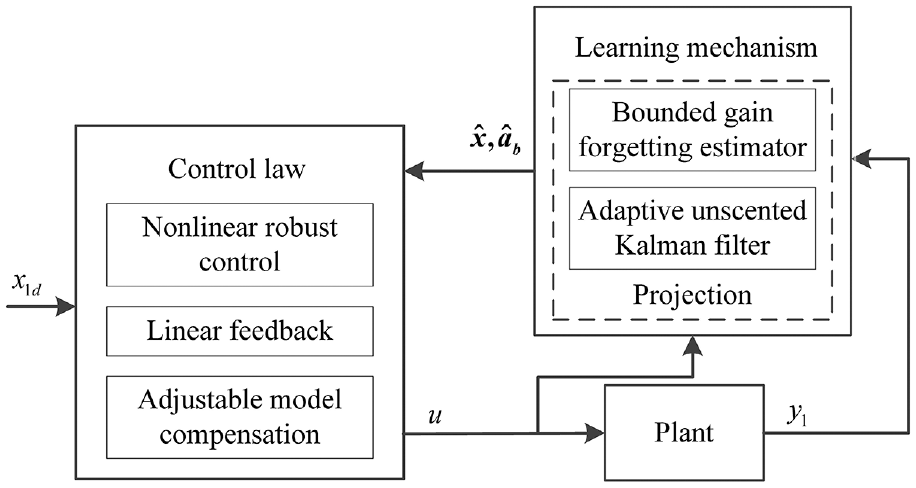
The schematic of proposed dual adaptive robust control policy.
A projection type adaptation law
To improve the robustness of the nonlinear system while retaining learning capability. A discontinuous projection

where

where
Lemma 1. Suppose that the parameter

With the proposed projection-type adaptation law (4), the estimated value of
Dual adaptive robust control law
The last subsection, a discontinuous projection that ensures the boundedness of parameter and state estimation is designed. The parameter and state estimation algorithm for
To avoid the complex computation of the differential of virtual control law in backstepping design, the command filter technique has been used. We define the intermediate virtual control function vector

where
Remark 1.
Step 1. Define

In equation (6), let

where

where
Define
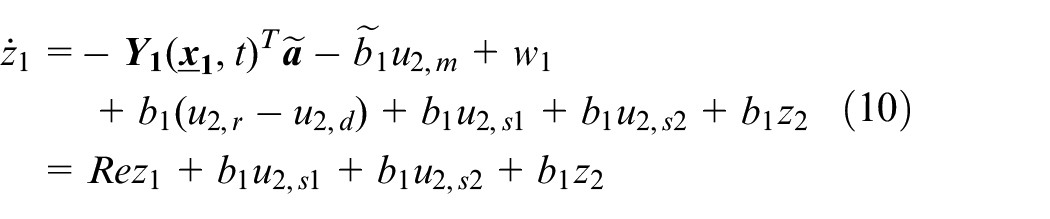
In equation (10),
Remark 2. One design of
where
where
Step i. We will design a virtual control law

To avoid the complex computation in conventional adaptive backstepping control, we can use the designed command filter in step

where
where

where
Define

In equation (17),
where
Step n. This is the last step. Let
Theorem 1. Considering the DARC control law

where

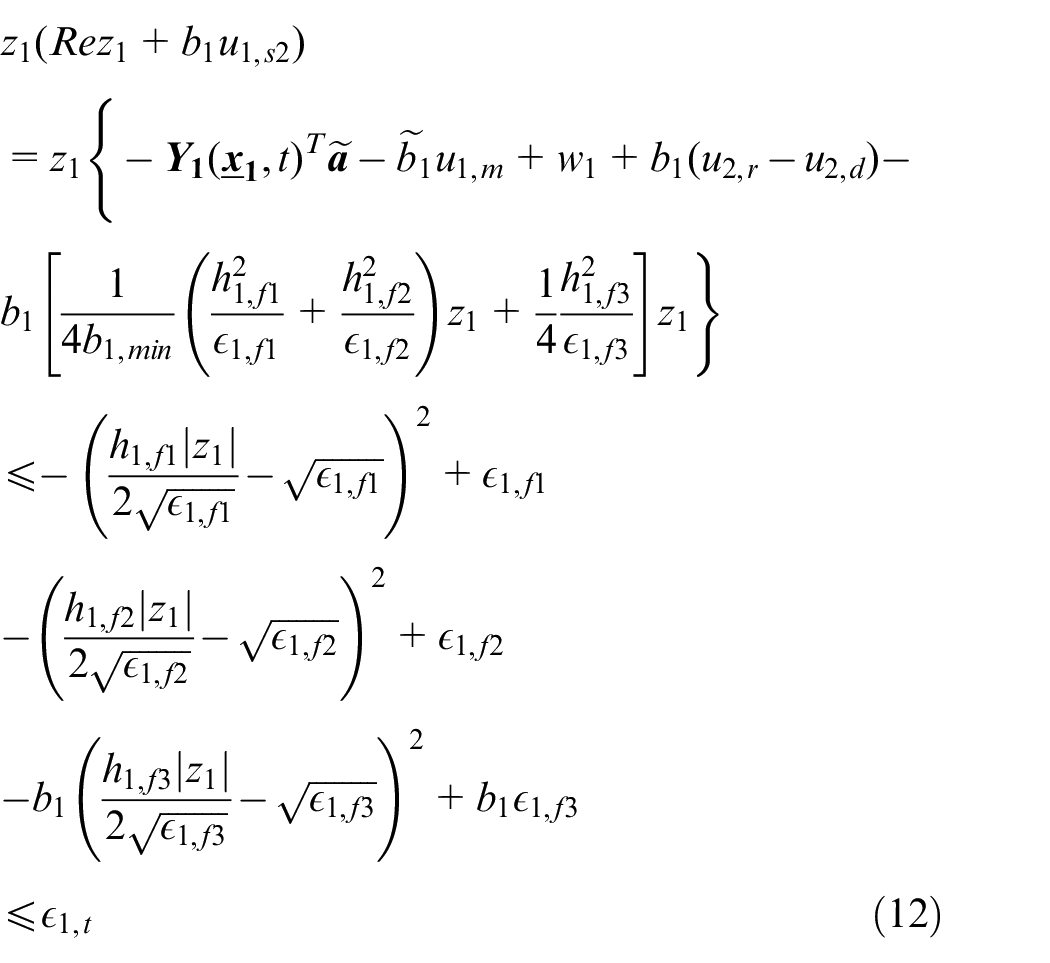
Considering equations (10) and (17), the derivative of
where
which leads to (19). In addition, the output tracking error
Dual adaptive estimation mechanism
In the above subsection, we synthesize the dual adaptive control law to obtain a guaranteed transient performance for nonlinear systems with model uncertainties. In the design procedure, only
Bounded gain forgetting estimator
The essence of parameter estimation is to extract useful information from measured empirical data. A model which represents the relation between the parameters and data is required. The model for parameter estimation is not necessarily the same as the control system model. Let us assume that the uncertain nonlinearities

where
The derivative of

where

where
where

where
Remark 3. The gain matrix
Theorem 2. Suppose the non-parametric uncertainties
Since the regressor
where
Adaptive unscented Kalman filter
State estimation is an indispensable part of control engineering. UKF is a popular method to estimate states from noise measurements for nonlinear systems with higher accuracy and is easier to implement than EKF. However, the performance of the UKF method suffers from a lack of precise statistical information. To improve the estimation accuracy of UKF, the AUKF method with a statistics estimator based on the MAP rule is proposed. For simplicity, the dynamic system (1) can be written as the following form.

where
Initialization
The initial values of state expectation
Prior estimation
At step
where

The prior estimation is given by
where
where

The prior estimation of
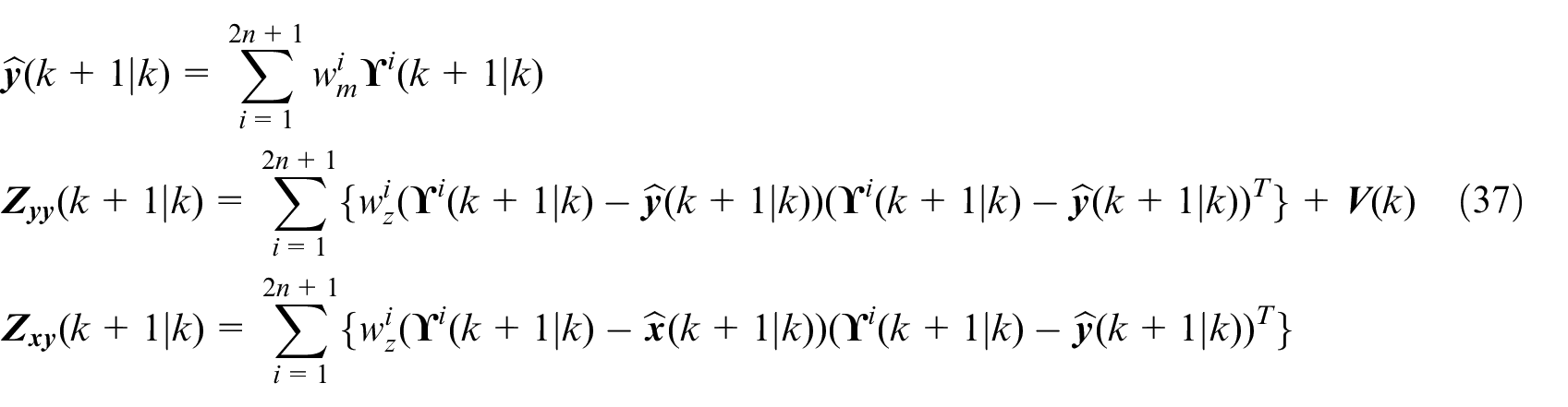
Post estimation
With the prior estimation, the Kalman gain is acquired by

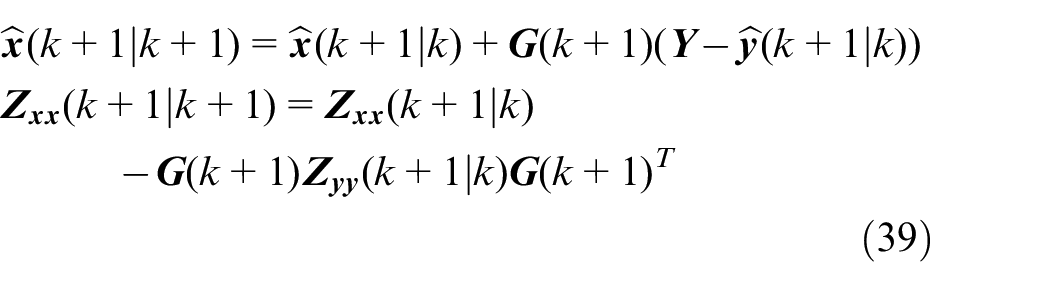
Finally, the post estimation of
Since the UKF is a modified Kalman filter, some prior knowledge as
Suppose the values of

where
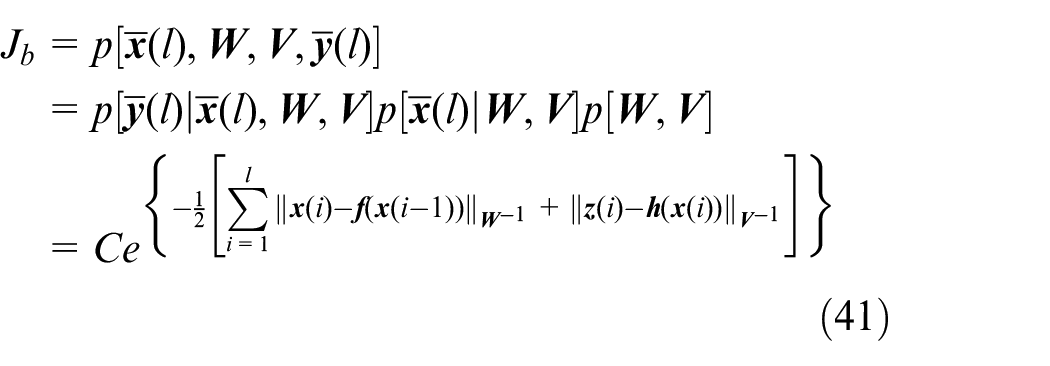
where
Note that the extreme points of

Solving equation (42) based on Zhao et al., 33 we obtain the MAP statistic estimator as
To avoid the computation complexity of
where

Similarly,

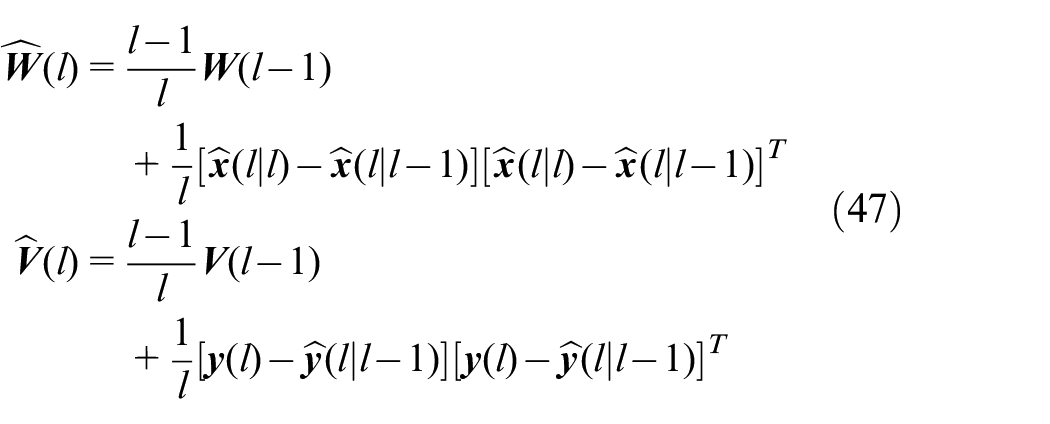
For the purpose of easy implementation, the recursive formula of equation (44) can be written as
Simulation example
Simulations of the following second-order nonlinear system with model uncertainties are carried out to evaluate the performance of the proposed DARC. The dynamic model of the system, which is often used to represent the servo motor, 34 is described as
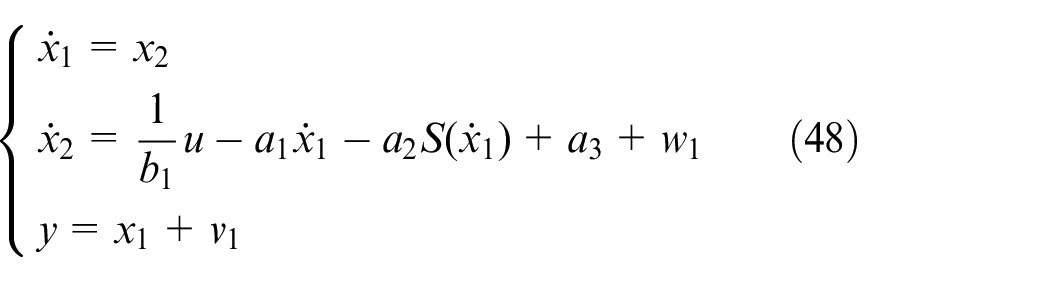
where
The desired trajectory is
where
Initial and true value of parameters.
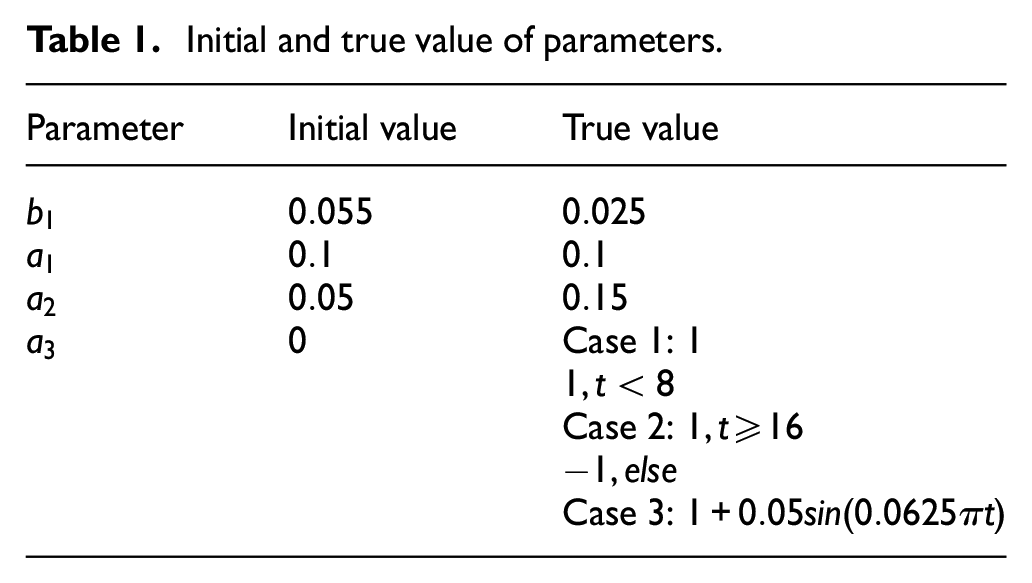
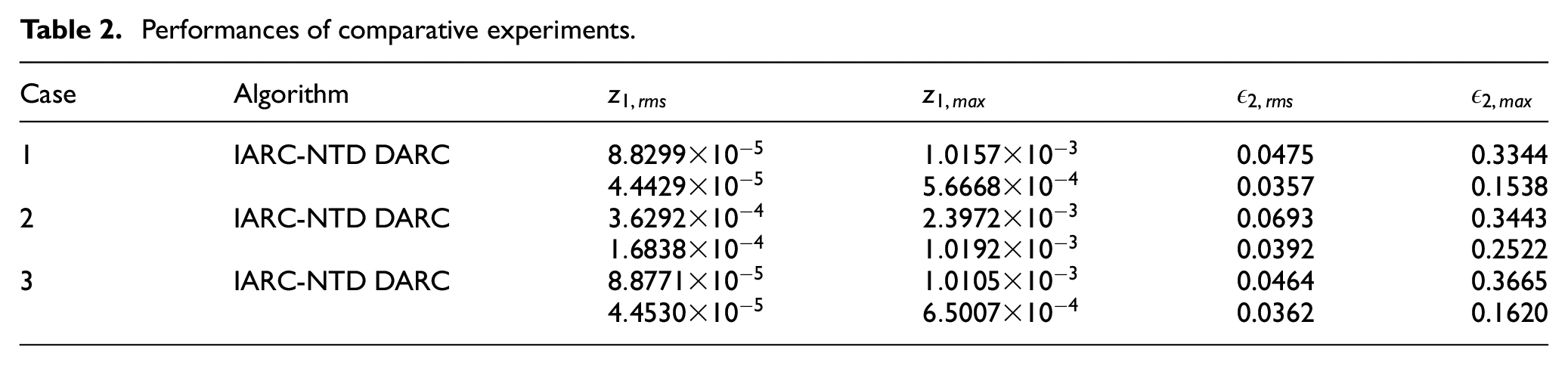
Figure 2 and Table 2 show that DARC achieves a higher tracking accuracy. Figure 3 and Table 2 indicate that our method is more accurate and reliable for the estimation of
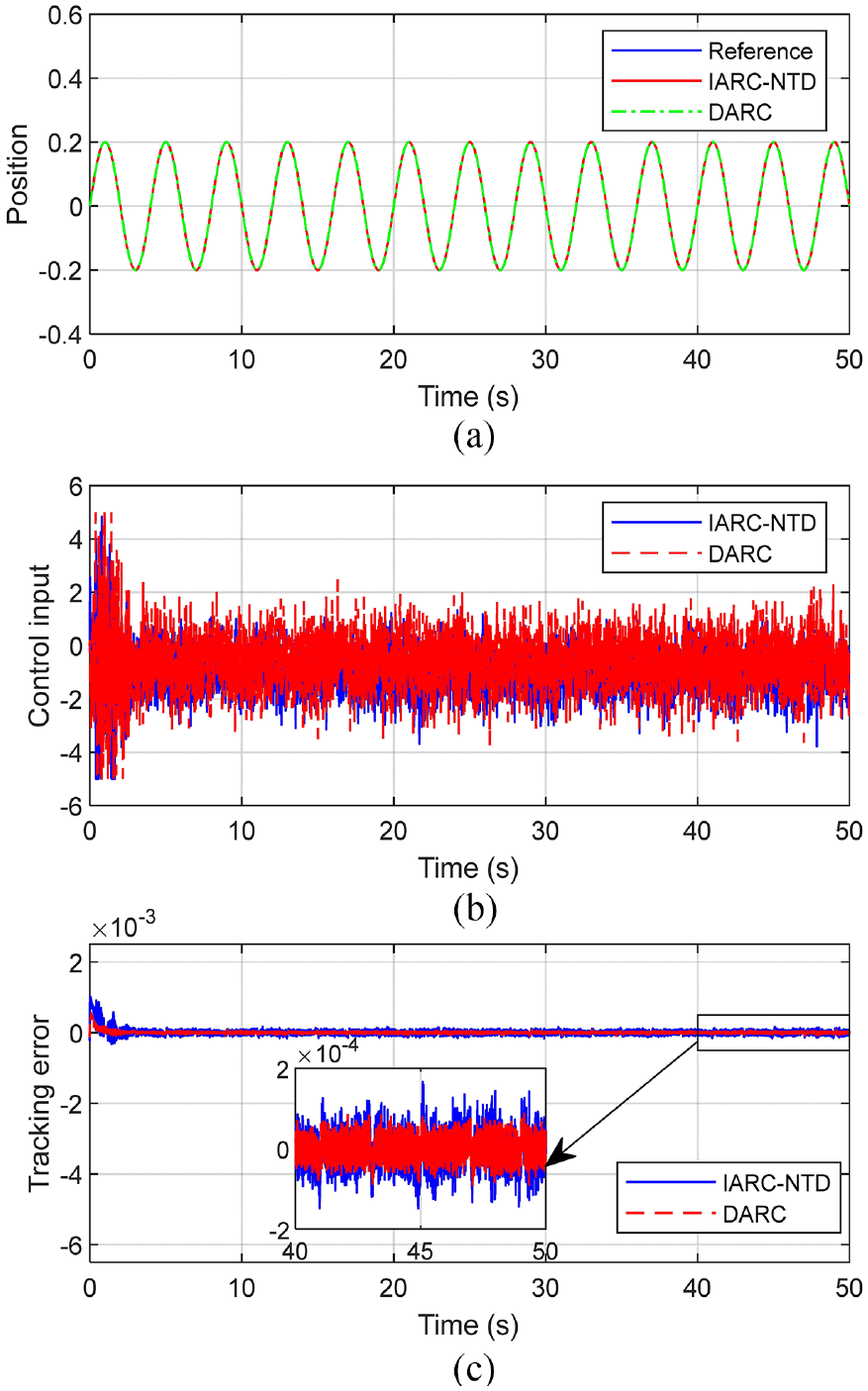
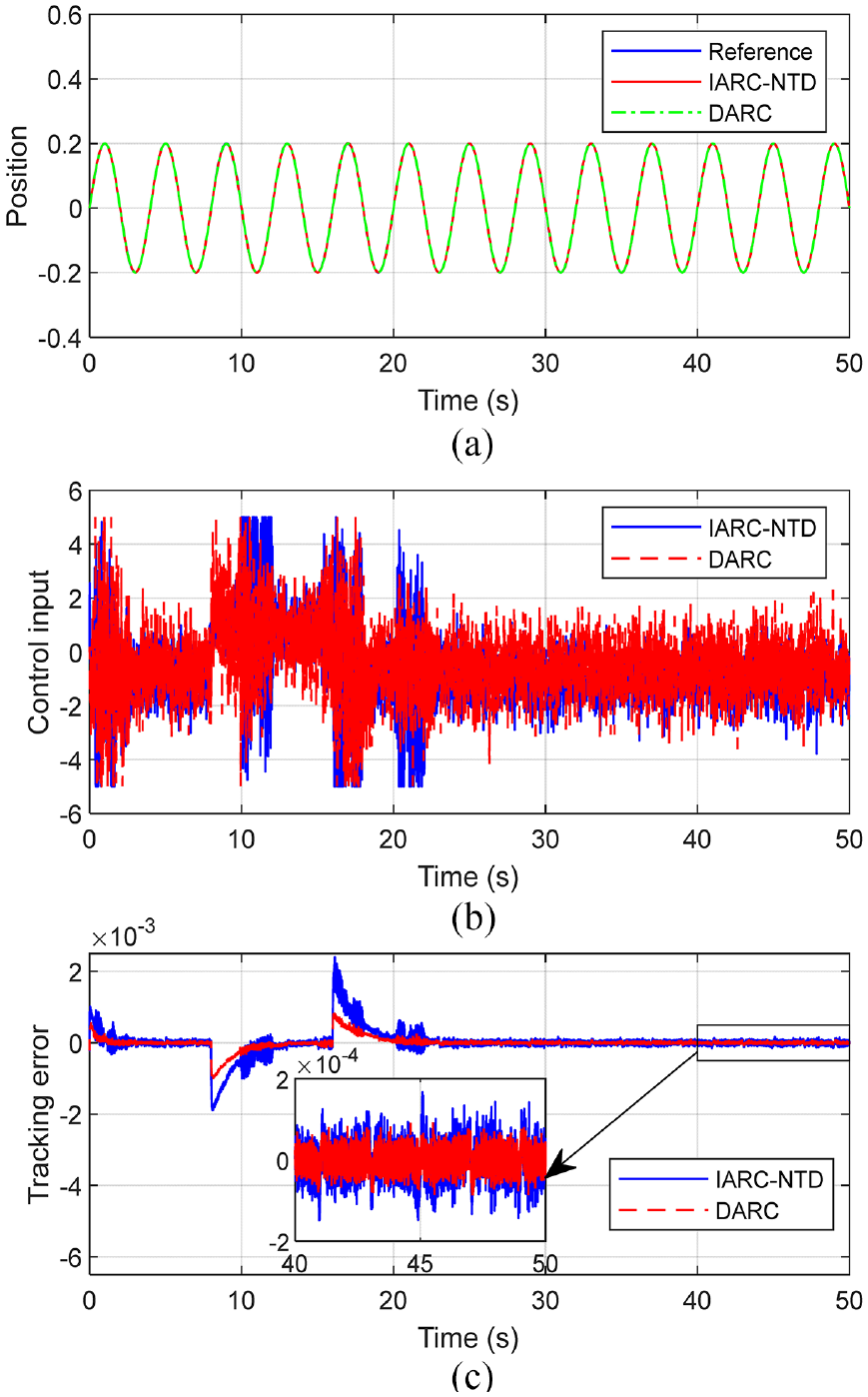
Reponse and tracking error of case 1: (a) System response, (b) Control input, and (c) Tracking error.
Performances of comparative experiments.
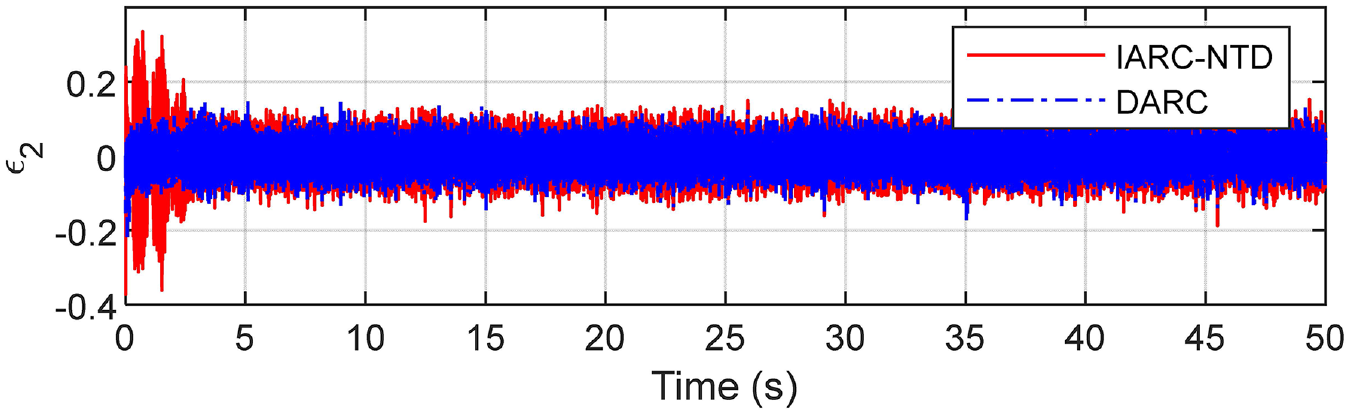
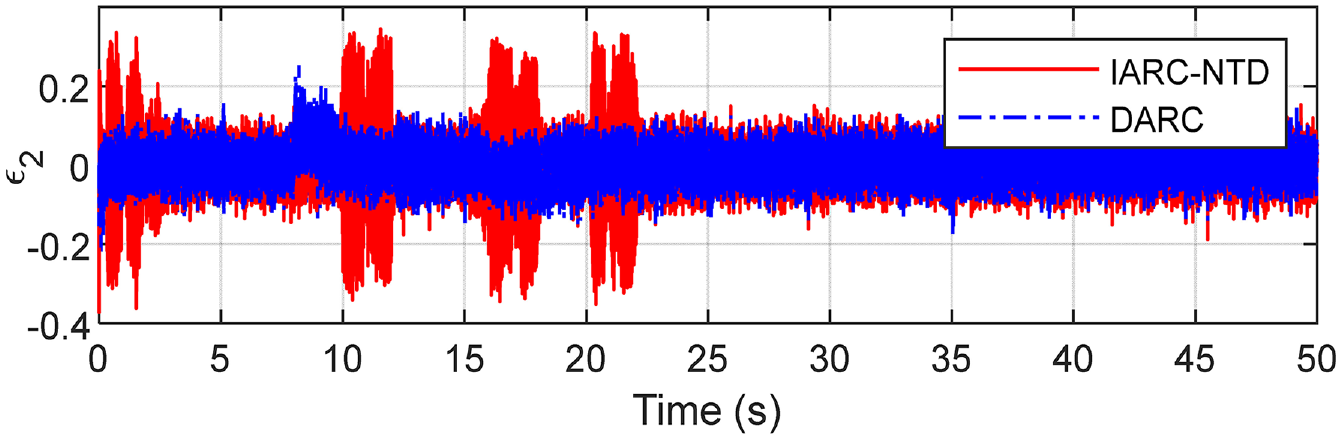
The estimation error of state
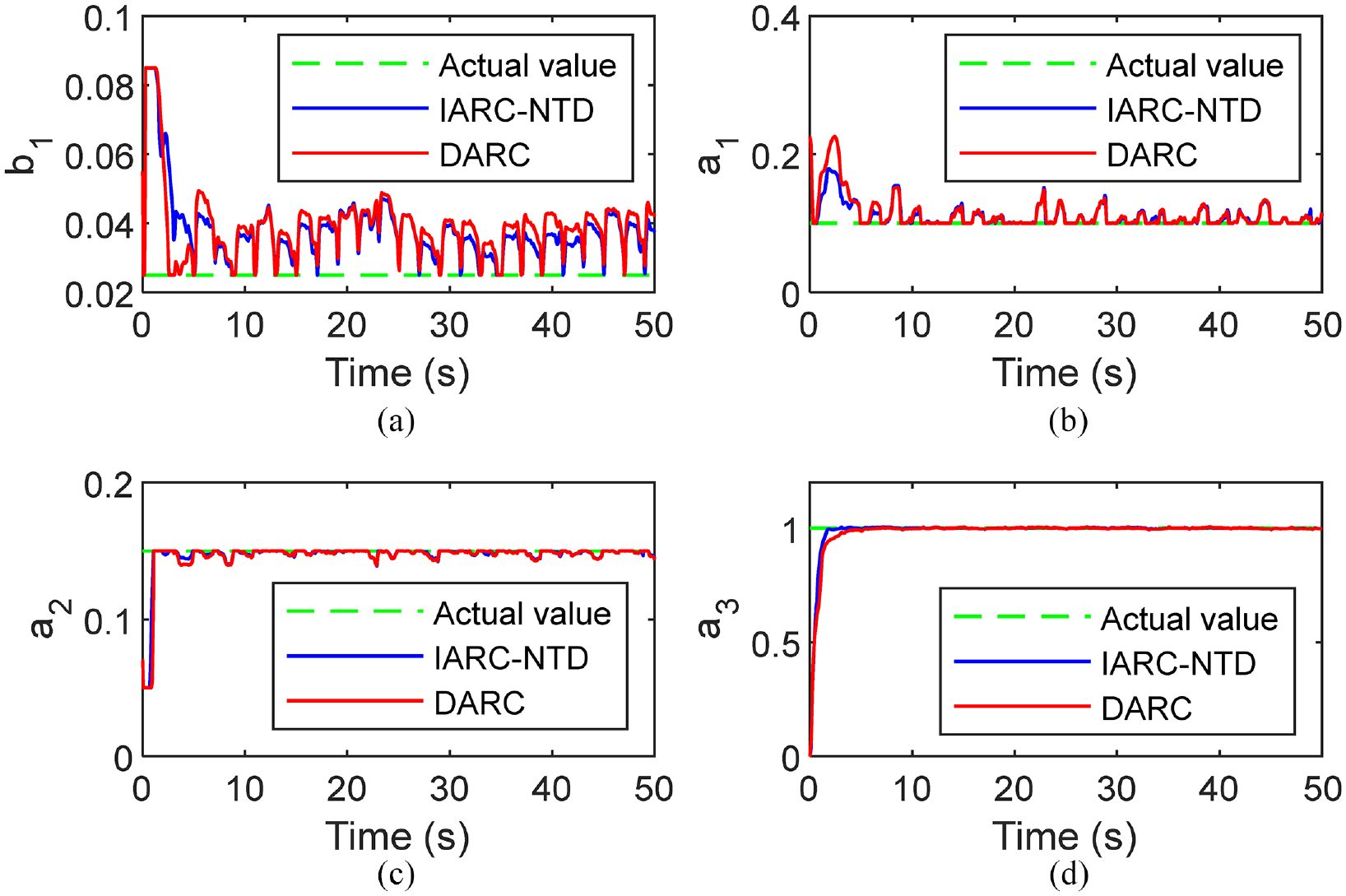
The estimation of parameters of case
Reponse and tracking error of case 2: (a) System response, (b) Control input, and (c) Tracking error.
The estimation error of state
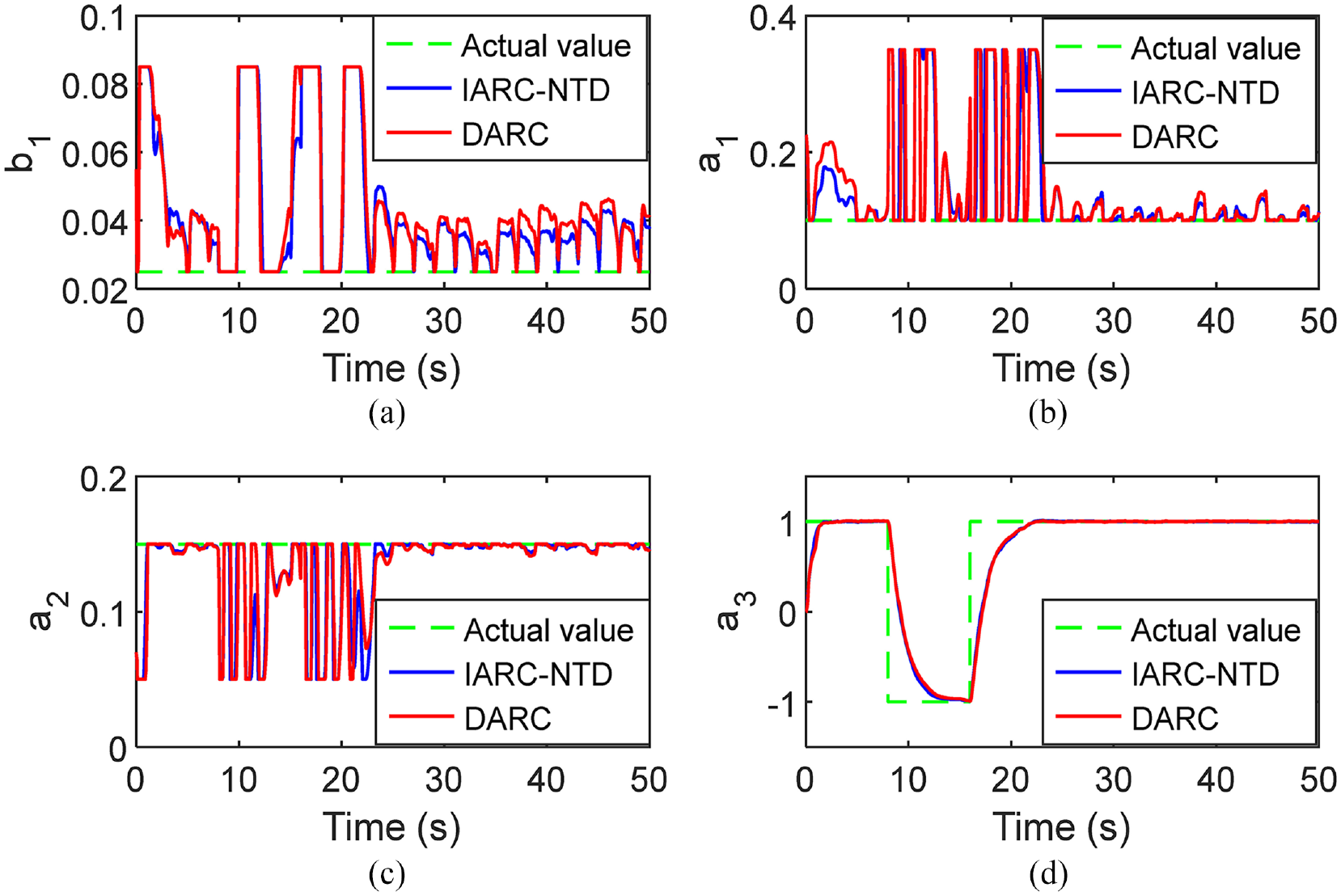
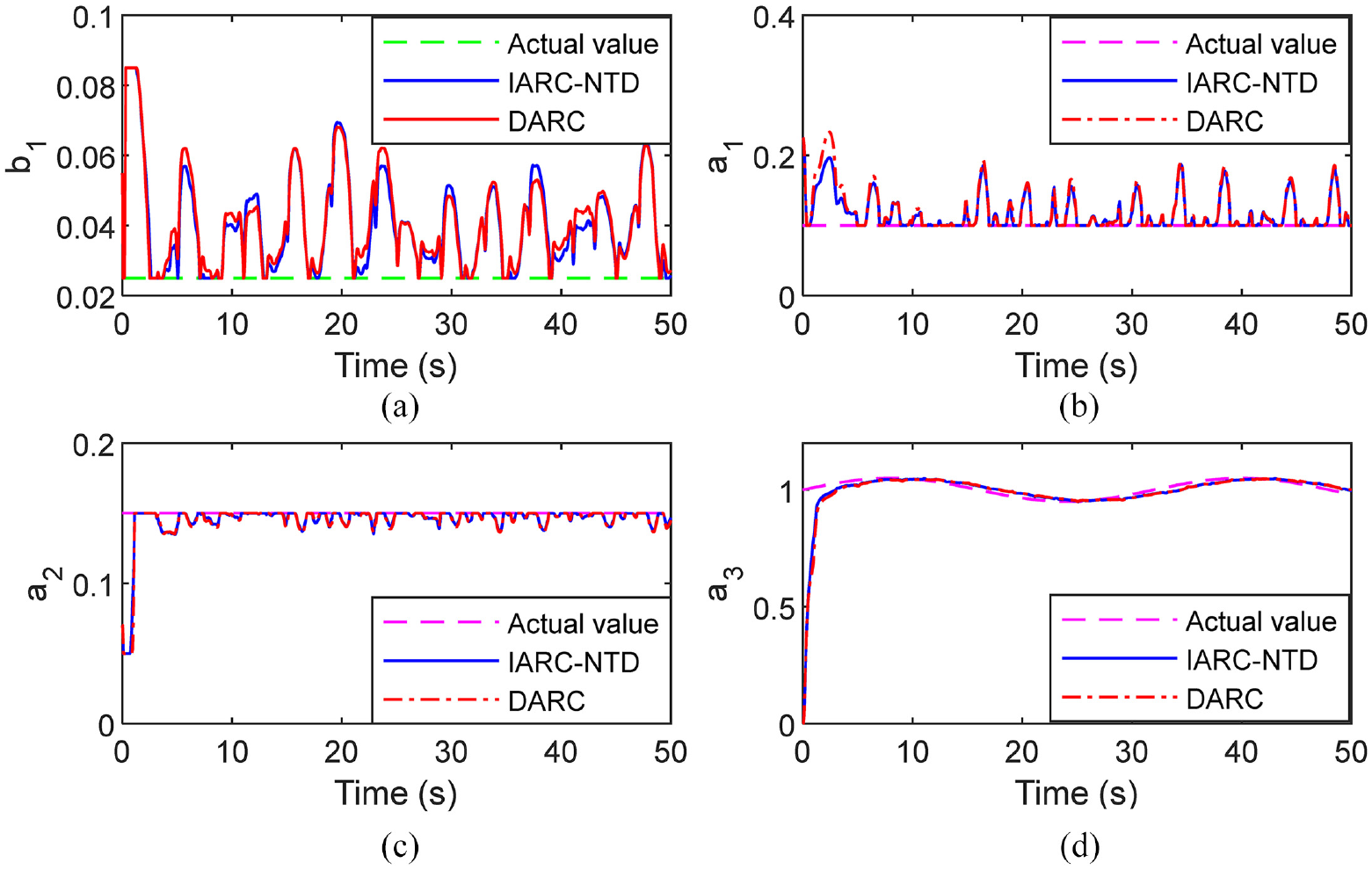
The estimation of parameters of case 2: (a) Estimation of b1, (b) Estimation of a1, (c) Estimation of a2, and (d) Estimation of a3.
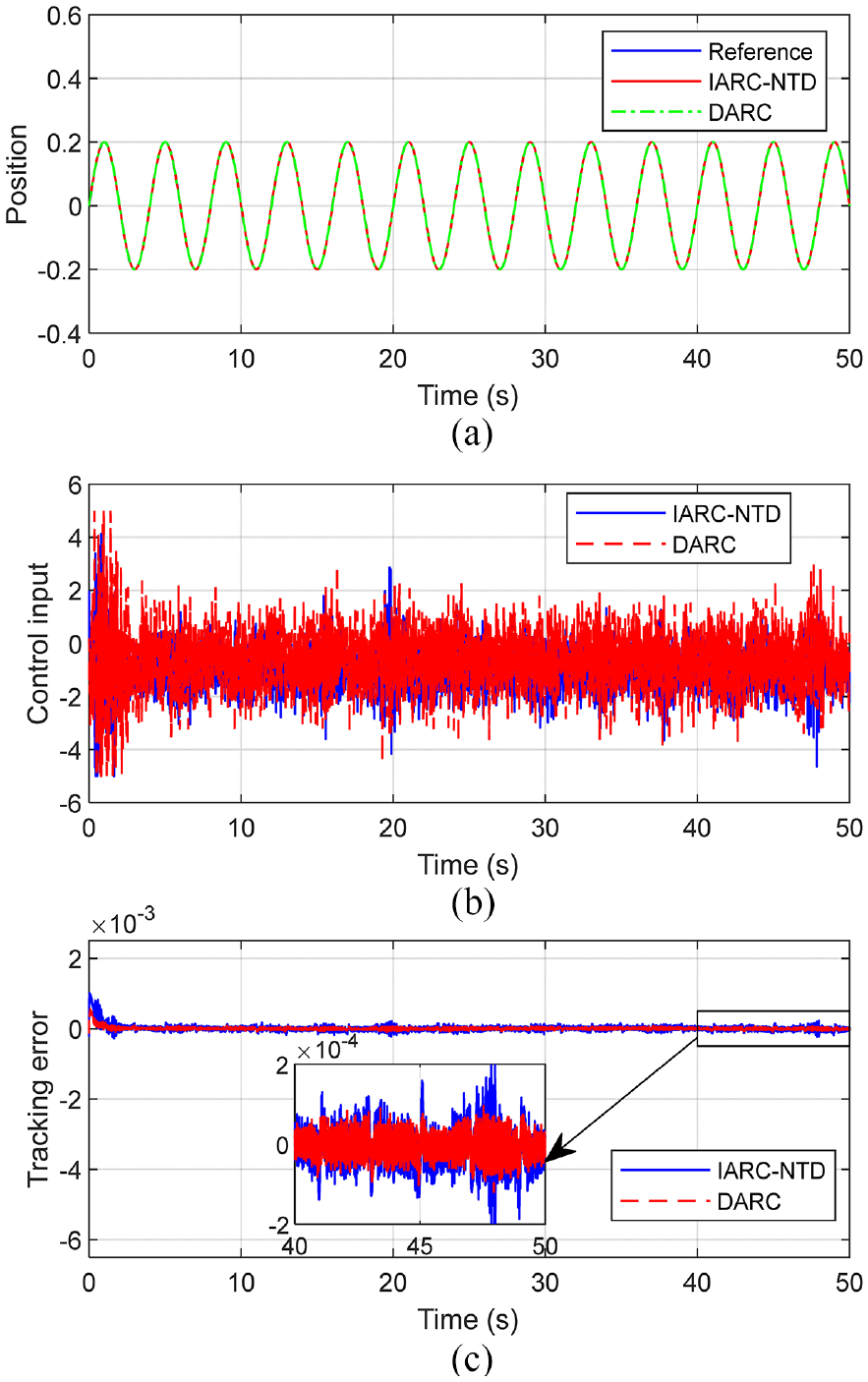
Reponse and tracking error of case 3: (a) System respone, (b) Control input, and (c) Tracking error.
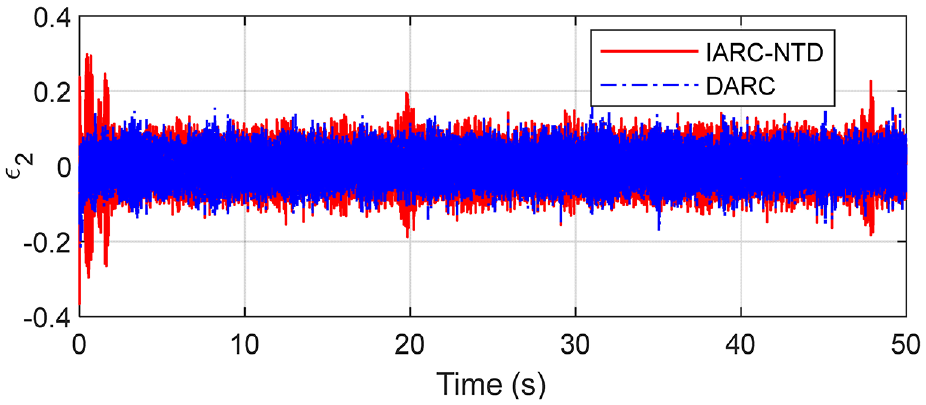
The estimation error of state
The estimation of parameters of case 3: (a) Estimation of b1, (b) Estimation of a1, (c) Estimation of a2, and (d) Estimation of a3.
Conclusions
This work proposes a dual adaptive robust control (DARC) design for nonlinear systems with unknown parameters and states. The DARC has intelligently integrated the deterministic robust control (DRC) philosophy and the dual adaptive estimation mechanism (DAEM) with a discontinuous projection. Then both stability of the whole system and a prescribed performance can be guaranteed. Also, the command filter technique is used to avoid the complex derivative calculation of virtual control law in the backstepping procedure. The DAEM consisted of the bounded gain forgetting (BGF) estimator and the adaptive unscented Kalman filter (AUKF) has been synthesized to improve the performance by accurately estimating parameters and states. The BGF estimator has a precise estimation of parameters even the parametric variation exists. The AUKF method with the MAP statistic estimator is developed to obtain a precise state estimation without knowing the covariance matrix. Therefore, not only good tracking accuracy but also precise parameter and state estimation can be achieved. Simulation results have been shown that the proposed method can achieve a desired level of performance in various complex working conditions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.