
Abstract
To deal with highly time complexity and unstable assessments for conflicting evidences from various navigation factors, we put forward an innovative assessment scheme of navigation risk based on the improved multi-source information fusion techniques. Different from the existing studies, we first deduce the nonlinear support vector machine classification model for the general scenario. The slack variable is adaptively computed based on the Euclidean distance ratio. Considering the unsatisfactory characteristics of the standard Dempster–Shafer evidence theory, the optimal combination rule is derived step by step. What"s more, the lowly dimensional Kalman filter is applied to forecast the navigation risk. Simultaneously, the time complexity of each technique is analyzed. With respect to the vessel navigation risk, the assessment results are provided to indicate the reliability and efficiency of the proposed scheme.
Keywords
Introduction
Navigation risk defines the occurrence likelihood of traffic accidents. As we know, the navigation factor mainly includes three kinds of important sub-factors, that is, hydrological sub-factor, environmental sub-factor, and navigable sub-factor. In the maritime engineering, it mainly refers the safe state and dangerous state reported by the International Maritime Organization,1,2 where the dangerous state often causes maritime disaster.3–5 Therefore, how to effectively assess navigation risk based on them has become a popular research topic in the world.
The multi-source information fusion technique is the intelligent combination of heterogeneous information, where the mathematical model is rigorous, robust, and general. Recently, some scholars have studied the assessment scheme of vessel navigation risk, and many articles based on this technique have been published in famous periodicals. Proceeding from the existing assessment schemes, we note that the analytic hierarchy process (AHP) is regarded as an important method that can divide a water transportation system into many subsystems. In this way, the subjective factor of experts plays a leading role in the reasoning framework.6–8 Considering the influence of experts’ experience, we had better seek the more effective method in order to achieve credible assessment. Alternatively, the Dempster–Shafer (D-S) evidence theory is a probabilistic appropriate algorithm of multi-source fusion.9,10 With the basic probabilistic assignment (BPA), two alternative techniques for combining evidences were introduced in Blasch et al. 11 In Zhang et al., 12 an improved D-S approach to construction the safety risk perception was proposed, where the combination rule and weighted average rule were integrated to synthesize multi-source. Subsequently, Ortiz et al. 13 complemented an analysis of risk and helped the decision maker in order to achieve the degree of confidence. However, the standard D-S evidence theory can hardly provide reliable results for conflicting evidences from various factors.14,15
To enhance the decision performance, the support vector machine (SVM) classification model is used to complete pattern classification and regression estimation by allowing examples to violate the margin condition.16–18 It is often considered as a new training algorithm for the polynomial, radial basis function (RBF), and multi-layer classifier by defining the kernel function. Aimed at the safety and reliability of surface vessels, Li et al. 19 diagnosed the navigation state to give a warning of dangerous state, which took measures to make vessels free from hazard before it was late. In Wang and Wang, 20 some models were to make estimation in the Yangtze River. Subsequently, the assessments were made by varying the quantity of significant wave heights based on the SVM model in Berbić et al. 21 In these models, the training data from practical applications are often contaminated by the random noise. Therefore, some raw samples in the training set or test set are misplaced on the wrong side by accident.17,22
Until now, we find that few works have been reported on the vessel navigation risk assessment by the nonlinear SVM classification model and optimal D-S evidence theory. Although the instantaneous risk assessment is useful, the risk forecasting is more practical for the water traffic. According to the Kalman filter (KF), an effective fusion technique for the state prediction is presented. Therefore, we further extend the proposed scheme to forecast the future risk, which saves time complexity of the back propagation neural network (BPNN) in Liu and colleagues.23–25 Take the case of the vessel navigation risk, we analyze how to integrate different techniques and improve both efficiency and reliability in order to accomplish risk assessment in the complex waters. The innovations are outlined as follows:
With respect to the practical applications, the nonlinear SVM classification model is derived to classify samples. Considering the Euclidean distance between each sample and the center of respective class in the kernel space, we adaptively compute the slack variable.
The enhanced D-S combination rule is explored to integrate conflicting evidences from various factors, whose time complexity is only proportional to the size of the risk set.
The above techniques are combined to assess the vessel navigation risk. What is more, the convenient KF is integrated to forecast the future risk for the first time.
The remainder of this note is organized as follows: First, the current issues of the vessel navigation risk assessment are formulated in section “Preliminaries.” In section “Methodology,” the nonlinear edition of the SVM classification model is derived by exploring the slack variable. The optimal D-S evidence theory with the novel combination rule is presented. Then, the low-dimensional KF is applied for the risk forecasting. Furthermore, the time complexity is analyzed analytically. In section “Numeric study and discussion,” the numerical studies are presented with the promising results to discuss the overall performance of the proposed scheme. We draw the conclusion with the next plan in “Conclusion.”
Preliminaries
With respect to the maritime engineering, the hydrological sub-factor plays an important part in the modern water traffic. First, the visibility means the maximum horizontal distance that the human eye can observe in the normal daytime, and the water traffic can be affected by the unsatisfactory visibility. The wind determines the sailing posture of vessels. Through the statistics, the wind speed is proportional to the occurrence probability of the water traffic accident. Moreover, the wave has the unexpected effect, whose high speed may lead to the vessel collision. As a practical sensor, the weather receiver is considered to collect different hydrological information. On the other hand, the vessel operator should take all things into consideration in the environmental sub-factor: the channel length, channel depth, and obstacle. In a long channel, the vessel power dramatically decreases with the increase of the water resistance. Both wiping and stranding may occur. Besides, some obstacles in the narrow channel are inherent harm to the navigation. To evaluate the environmental sub-factor, the navigation telex is used in this work. The navigable sub-factor refers to the background of the navigation route. The crossing channels often lead to the increase of water traffic accident when vessels encountering. Due to various vessel speeds, the chasing can cause the vessel collision to some extent. Since the vessel traffic system (VTS) plays a guiding role in maintaining the navigation safety, we use it to assess the level of the navigable sub-factor.
In practice, the heterogeneous sensors (the weather receiver, navigation telex, and VTS) have different identification abilities for the associated sub-factors that have various physical characteristics and variable probabilistic models, where the hydrological sub-factor is easily interfered by the natural phenomenon whereas the environmental sub-factor changes slowly. Moderately, the navigable sub-factor is determined by the detection performance of the VTS. Aimed at the independent of three kinds of the mentioned sub-factors, the reliability of heterogeneous sensors should be taken into consideration.
Methodology
In order to reduce the conflicting evidences from various factors, the posterior probability from the SVM classification model makes use of the information combination in the D-S framework. The output of the nonlinear SVM model includes the sample classification and probability, that is, the SVM training improves the classification accuracy which gives satisfactory solution to the assignment problem to the BPA. However, one assumption of the SVM is that all samples follow the independent and identical distribution. Once some samples are misplaced on the wrong side by accident, the model is no longer sparse because it is sensitive to the random noise. Thus, the single SVM approach cannot give the reliable result. It is necessary to present an integrated scheme in order to effectively compute the optimal BPA from each sub-factor based on the nonlinear SVM classification model and then assesses the vessel navigation risk. In view of the forecasting function, the convenient KF is supplemented using the BPA. In this work, the initial inputs are the raw information of the hydrological sub-factor from the weather receiver, the environmental sub-factor from the navigation telex, and the navigable sub-factor from the VTS. According to the proposed information fusion techniques, the vessel navigation risk assessment and forecasting results are considered as the expected outputs. To pave the path to the proposed assessment scheme, we outline three kinds of the innovative multi-source information fusion techniques in this section.
Nonlinear SVM classification model
In general, many identification problems are not linearly separable, where some parameters are unknown. In this work, the SVM classification model is extended to map the low-dimensional input vector from the Euclidean space

Considering the training sample set
where
With respect to the first nearest neighbor classifier, there is further advantage in the non-separable case. 27 Then, we define the Wolfe dual problem as

According to equation (1), the solution of equation (3) is

Considering the regression estimation, we construct the Lagrange function

where
Proposition 1
Given that the slack variable

where
Proof
Suppose that the subscripts

Substituting equation (8) into equation (7), we find that the numerator defines the Euclidean distance between each sample
Subsequently, we have in hand the optimal parameters

In equation (9),

where
In the SVM decision, the desired output

where

where
Optimal D-S evidence theory
After the derivation of the nonlinear SVM classification model, we will present the optimal D-S evidence combination rule for the uncertain probability conditions, which can improve performance of the vessel navigation risk assessment based on the initial classification of the SVM outputs, especially for the conflicting evidences of various sub-factors.
The D-S evidence theory assumes the hypotheses to be mutually exhaustive and exclusive in the space Θ4,10

where the mass function

On the other hand, the plausibility defines one minus the sum of masses in all sets, where the intersection with the hypothesis is thoroughly empty. Given that some evidences may contradict hypothesis, the plausibility function

According to equations (15) and (16), the D-S evidence theory provides a measure based on the closed period

where

In equation (18), the numerator means the belief, and the denominator denotes the plausible. Obviously, the belief can be converted to the Bayesian belief function after assigning the related BPAs

As for some conflicting or insufficient evidences, the standard D-S evidence theory may be invalid. At this time, the sum of all BPAs in equation (19) is less than 1, which brings about unstable combination results. We should introduce the BPA


In equations (20) and (21), the denominators are exactly the same. For simplification, the pseudo BPAs


where


Substituting them into equations (20) and (21), we get the optimal combination rule as follows


Note that the fused BPA can be achieved using the iterations of equations (26) and (27) instead of the standard equation (18). After computing the fused BPA
Extension to risk forecasting
The former subsections present the assessment process based on two kinds of the information fusion techniques. Different from the existing studies on the vessel navigation risk assessment, the risk forecasting can apply the valuable forecasting information for the next time. As a warning of the future state, it has practical significance to make vessels free from the potential hazard in the navigation engineering.
At time

where
Assume that

where
The Kalman gain is calculated by

where
Let


where
Time complexity
The time complexity is an important measure to evaluate the evolution of the combination process. Therefore, the time complexity can measure the efficiency of the proposed scheme. In terms of n classifiers and
Subsequently, we analyze the time complexity of the optimal D-S evidence theory. Aimed at the size of the risk degree set
Given that the time complexity of the traditional KF is
To sum up, the total time complexity of the proposed scheme is given by

For comparison, the total complexity of three kinds of standard techniques is

Note that the total time complexity of the proposed scheme can be effectively saved with the increase of
Numeric study and discussion
In this section, the reliability and efficiency of the proposed scheme are illustrated by the example of the vessel navigation risk. We use the weather receiver, navigation telex, and VTS to collect various navigational parameters in the certain waters. Since the information from the heterogeneous sensors is uncertain, the multi-information fusion is expected to yield decision with a reduction in the overall uncertainty. Considering the nonlinear SVM classification model, we use the subscript
Suppose that the surveillance period is 100 s, and sampling time is 1 s. For example, we use the input
Raw information of sub-factors.

After the SVM training, the sample set is input into the nonlinear SVM classification model, where the related parameters are
Proposed SVM results.
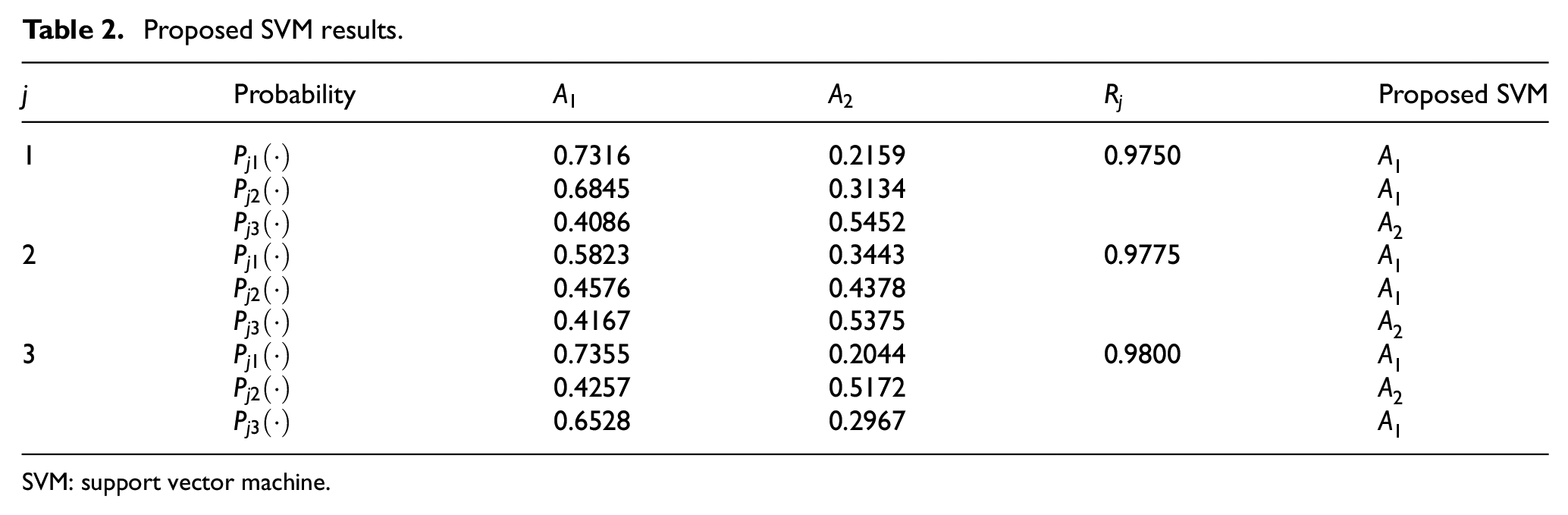
SVM: support vector machine.
Furthermore, the standard SVM results are shown in Table 3, which are the hard-output corresponding to the initial classification. In this table, there are four unexpected assessments (e.g.
Standard SVM results.

SVM: support vector machine.
As for the D-S combination rule, we have in hand the parameter
BPA results.

BPA: basic probabilistic assignment.
Table 5 gives the fused BPAs and final results. Since the maximal value of
BPA and combination results.
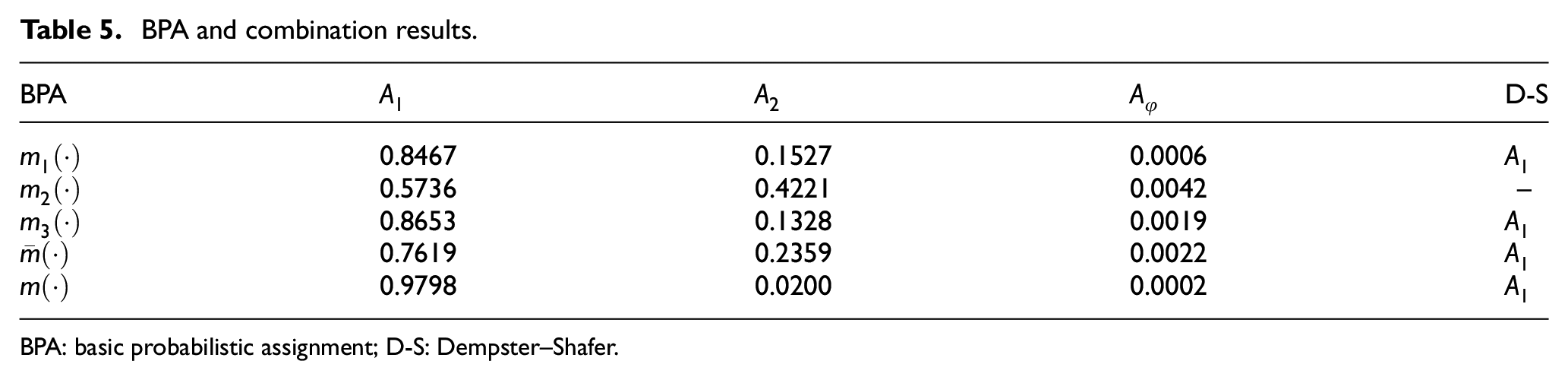
BPA: basic probabilistic assignment; D-S: Dempster–Shafer.
Figure 1 demonstrates the calculated and predicted values of the fused BPAs during the whole surveillance. The initial values are 1, 0, and 0 corresponding to





Prediction of BPA.
In Figure 1, we note that the fluctuation of the forecasting results is obviously small, which can be explained that the KF provides the reliable forecasting information with the smaller error covariance. Therefore, the solid lines in this figure can apply the vessel navigation risk forecasting at the next time.
Table 6 shows the comparison results of the standard SVM classification model, D-S evidence theory, and proposed scheme. As seen, the latter method has higher accuracy than others. The reason is that a single classifier is affected by the conflicting evidences. When the D-S combination rule is directly applied, it is also difficult to construct a more reasonable BPA. In the proposed scheme, the nonlinear SVM classifier gives the initial classification, and then some uncertain information is corrected based on the optimal D-S combination rule. Combined with many multi-source information fusion techniques, the averaged assessment accuracy of the proposed scheme is higher than other two independent methods.
Comparison of averaged assessment accuracy.

SVM: support vector machine; D-S: Dempster–Shafer.
Although the timely vessel navigation risk assessment is necessary, the risk forecasting is of great significance in the navigation engineering. We consider the overall performance of the risk forecasting in two aspects: both reliability and efficiency. Table 7 presents the averaged forecasting performance of the standard SVM/D-S/KF, SVM/D-S/BPNN, 33 AHP, 7 and the proposed scheme. It can be found that the forecasting accuracy of the first method is the lowest due to the propagation of the BPA error in the multi-dimensional model. The BPNN of three-input-layer, eight-hidden-layer, and three-output-layer has the similar reliability with the proposed scheme. The reason is that the hidden layers reduce the BPA error propagation, and the individual KF with its filtering parameters has distinguished BPA. Obviously, the AHP method can sufficiently give the forecasting values because the subjective weights from experts affect the final results. However, different experts may make different scores on various sub-factors. The weights must be adjusted promptly, or the final result will diverge. As for the proposed scheme, the averaged forecasting accuracy is satisfactory without any experts’ experience.
Comparison of averaged forecasting accuracy.

SVM: support vector machine; D-S: Dempster–Shafer; KF: Kalman filter; BPNN: back propagation neural network; AHP: analytic hierarchy process.
Finally, Table 8 shows the complexity comparison of different methods under the different detailed parameters, which are adjusted based on the practical applications. The number n of the classifiers is 2 or 3, that is, there are at least two classifiers corresponding to the mentioned heterogeneous sensors. However, the number
Complexity comparison of different methods under the different parameters.

SVM: support vector machine; D-S: Dempster–Shafer; KF: Kalman filter; BPNN: back propagation neural network; AHP: analytic hierarchy process.
Conclusion
This article developed an innovative scheme based on the improved multi-source information fusion techniques in order to provide the reliable assessment and forecasting results. Given that some available samples in the training set are misplaced on the wrong side by accident, we derive the nonlinear SVM model to adaptively classify them. Given that the standard D-S evidence theory cannot provide the effective combination result for the conflicting evidences, the optimal combination rule is presented with the lower time cost. As an important part of the proposed scheme, the vessel navigation risk forecasting is achieved with the low-dimensional KF. Finally, the assessment results are discussed to verify the reliability and efficiency of the proposed scheme. As for the future developments, we continue to systematically integrate each technique in the proposed frame in order to reduce the time complexity. Especially, we will further enhance the forecasting accuracy using the adaptive KF estimation.
Footnotes
Handling Editor: Janos Botzheim
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51679116), the Innovative Talents Support Plan of Colleges and Universities of Liaoning Province (grant no. LR2017068), the Doctoral Scientific Research Foundation Guidance Project of Liaoning Province (grant no. 201601343), and the Program for Liaoning Innovative Research Team in University (grant no. LT2016006).