
Abstract
The radio frequency identification technology was given greater interest as it is widely used for identification and localization in the cognitive radio sensor networks. While radio frequency identification–based indoor localization is attractive, the need for a large-scale and high-density deployment of readers and reference tags is costly. Using mobile readers mounted on guide rails, we design and implement an RFID indoor localization system, which requires neither reference tags nor received signal strength indicator functions, for stock-taking and searching in warehouse operations. In particular, we install two guide rails, which can allow a reader to move horizontally or vertically, on the ceiling of a warehouse or workshop. We then propose a continuous scanning algorithm to improve the accuracy for locating a single tagged object and a category-based scheduling algorithm to shorten the time for locating multiple tagged objects. Our primary experimental results show that RFID indoor localization system can achieve high time efficiency and localization accuracy in the indoor localization.
Keywords
Introduction
Radio frequency identification (RFID) and cognitive radio sensor network (CRSN) are two important wireless technologies that have a wide variety of applications and provide unlimited future potentials. RFID assists identification and localization of the objects while CRSN gives information about the physical condition of the objects. Similar to sensor nodes in CRSNs, RFID tags have a typical read range of 3–10 m in free air. Compared with the traditional bar code system, the RFID system does not need line-of-sight so that tags can be attached on objects and deployed in harsh environments. An RFID system is divided into two parts, tags and the reader. The tags are classified into active tags and passive tags. Active tags have built-in power source. An internal battery inside provides power so that it can extend the read range of tags. Passive tags have no built-in power source. The power is extracted from the signal sent by the reader. It can be used to operate the microchip. Due to the absence of external power source, a passive tag has the following advantages: lower price, longer life time, and smaller size. These advantages make the passive tag used more widely than active ones in real-world applications.
Indoor localization has been known as an important application of RFID. Most existing RFID-based indoor localization systems use received signal strength indicator (RSSI) measurements to estimate the possible range of a tagged object. They place reference tags, which can be either custom or active tags, at known locations in a warehouse or a workshop. The reference tags serve as landmarks in the warehouse by providing information about signal strength. Comparing the signal strengths obtained from different tags, readers deployed in strategic locations can determine the rough trajectory of a moving object, or the presence of a stationary object within a certain range. Although existing systems can provide fine-grained localization, there are some practical problems with using RSSI measurements in RFID systems: (1) RSSI functions are not available on most RFID devices,1,2 (2) the deployment of high-density reference tags and multiple readers is costly, 2 (3) the interference among reference tags may change signal strength and affect localization accuracy,3,4 and (4) RSSI measurements are commonly used for locating active tags.3,5–7
In this article, a cost-effective and high-accuracy RFID indoor localization system (RILS) is designed and implemented to improve efficiency and reduce costs in some major warehouse operations, such as stock-taking and searching, which are time-consuming and often lead to mistakes. In particular, two guide rails, x-axis and y-axis guide rails, are deployed on the ceiling of a warehouse or workshop. A reader can be moved along either the x-axis or y-axis by two rails. A continuous scanning algorithm is then proposed to improve the accuracy for locating a single tagged object. Locations of the reader are recorded by such an algorithm when the first and the last times the tagged object is successfully detected. The tagged object is located at one of the intersection points of two circles. Both circles are centered at the recorded locations with a radius equal to the read range. A category-based scheduling algorithm is also proposed to reduce the time for locating multiple tagged objects placed in different storage areas. When localization requests arrive or are processed, the number of storage areas to be scanned may change with time. Thus, the problem of finding an optimal scan path for the reader is a time-dependent optimization problem, which can be modeled by the dynamic traveling salesman problem (DTSP). The proposed algorithm decomposes DTSP into a series of static traveling salesman problems (TSPs) and runs the 2-approximation algorithm to solve the static TSP at regular time intervals. Overall, RILS has the following properties:
Reliability. It works in the steady state which is suitable for making reliable measurements.
Scalability. It uses only one standard passive RFID reader and requires neither reference tags nor phase/RSSI functions.
A prototype system is developed to evaluate the performance of the proposed algorithms. Our preliminary experimental results demonstrate that the localization error can be decreased by 30% and the time can be saved by 10% with continuous scanning under given conditions. By contrast, the category-based scheduling can shorten 42% movement time of the reader.
The contributions of this work are summarized as follows:
A continuous scanning algorithm is then proposed to identify the exact location of a tagged object.
A category-based scheduling algorithm is proposed to determine the scanning order of multiple tagged objects.
A prototype is implemented to evaluate the performance of proposed algorithm.
The rest of the article is organized as follows. Section “Related work” gives an overview of the related work. Section “System design and implementation” illustrates system design and implementation and analyzes the system cost. Section “Localization algorithm” proposes a continuous scanning algorithm to locate tagged objects. Section “Scheduling algorithm” offers a category-based scheduling algorithm to manage the reader movement. Section “Performance evaluation” designs experiments to evaluate the performance of the proposed algorithms. Section “Conclusion” concludes this article.
Related work
A considerable amount of experiments have been conducted about indoor localization systems. Tagged objects are located or tracked by a majority of extant systems or schemes via RSSI measurements. SpotON5,6 is one of the earliest systems for RF-based three-dimensional (3D) location sensing. Multiple base stations estimate the approximate distance to the tagged object through signal strength measurements. The system requires a number of custom tags and base stations. The cost of a development board for tag or base station is around US$120. A central server then aggregates the distance values to triangulate the position of the tagged object. Instead of using custom tags and base stations, LANDMARC
3
deploys active tags at known locations as reference tags. These reference tags provide information about the signal strength. With this information, the system adopts a k-nearest neighbor algorithm to estimate the location of the tagged object. Wang et al.
7
proposed two RFID-based 3D positioning schemes, namely, active scheme and passive scheme. Both schemes are based on the Nelder–Mead nonlinear optimization method that minimizes the error objective functions. The active scheme locates an object equipped with a reader. The passive scheme locates an object with a tag attached. Zhang et al.
4
presented a model of signal dynamics to allow tracking of transceiver-free objects. Based on the RSSI information, they proposed three tracking algorithms to eliminate noise behaviors and improve accuracy. Midpoint and intersection algorithms track a single object without calibration. The best-cover algorithm tracks multiple objects with calibration required. L-VIRT
8
use both static and mobile readers to define topological constraints that delimit volumes of presence for the tags. Ting et al.
2
studied the feasibility of using the RSSI measurement for locating and tracking passive tags. They run an experiment on a
Some other existing systems increase practicability and performance in site-specific applications. The R-LIM system 9 is an affordable system for locating books in the library. Unlike pervious systems, it places reference tags, called shelf-tags, rather than readers on each shelf, and associates book-tags with shelf-tags through periodic scanning. Zhu et al. 10 proposed an activated tag included (ATI) method for the fault-tolerant RFID reader localization. Such a method is suitable for the situation that some tags fail to communicate with the reader due to shielding effects. Shangguan et al. 11 established a probabilistic model for recognizing the transient critical region and proposed the OTrack protocol to continuously monitor the order of tagged goods on the airport baggage conveyor belt. The Tagoram system 12 leverages the phase value of the backscattered signal, provided by the commodity-off-the-shelf (COTS) RFID reader, to realize real-time tracking of mobile RFID tags. Zhao et al. 13 revealed the unique hardness in localization on 3D surface. A general 3D surface is not always localizable, given surface distance constraints only. Yang et al. 14 proposed a distributed algorithm to locate wireless sensors deployed on 3D surface. Such an algorithm constructs a well-aligned mapping between the triangular mesh of the digital terrain model (DTM) of the terrain surface and the triangular mesh extracted from the connectivity graph of the network deployed on the terrain surface. Maneesilp et al. 15 proposed two schemes, passive and active, to locate tags and readers in a hexahedron. Bu et al. 16 studied RFID 3D localization from perspective of time efficiency and energy efficiency. The localization accuracy can be improved if the reader probes sufficient number of reference tags. Some applications for the vehicular networks are described in Quan et al. 17 and Cheng et al. 18 The security issues are discussed in Chen et al.19,20
System design and implementation
In this section, the structure of the system is introduced. Then, a prototype system is presented and its cost is analyzed.
Design and architecture
A system called RILS was designed to locate stationary objects attached with passive tags with high accuracy. The system is built by the following four steps: (1) first, two kinds of guide rails, x-axis and y-axis guide rails, are customized in accordance with the size of the warehouse ceiling; (2) then two y-axis guide rails are installed on both vertical verges of the warehouse ceiling; (3) after that, the x-axis guide rail is installed between those two y-axis guide rails; and (4) finally, a reader is attached on the x-axis guide rail. Two electric motors, which are separately installed on x-axis and y-axis guide rails, called x-axis and y-axis electric motors, provide power to move the reader from one location to another. Two electric motors, called the x-axis motor and the y-axis motor, are separately installed on the x-axis and y-axis guide rails. The reader is moved from one position to the other freely by those two motors.
Figure 1 depicts how the reader moves to a certain location by the example. As shown in Figure 1, the reader attempts to move from location

An example of the reader movement.
Implementation and costs
The system implementation consists of the following phases: guide rail installation and electric motor control. The guide rail installation takes the following steps: (1) two circular linear guide rails are chosen asy-axis guide rails, because each of them includes a support structure that can be easily attached to the ceiling; (2) four synchronous wheels are mounted at both ends of each y-axis guide rail and connect them via plain shaft or synchronous belts. The plain shaft is connected to an electric motor, providing power to all of these synchronous wheels. When the synchronous wheels turn, these synchronous belts will move the x-axis guide rail along the y-axis guide rail; (3) a miniature linear guide rail is set as the x-axis guide rail, because it is small in size and light in weight; and (4) two synchronous wheels are installed at both ends of the x-axis guide rail and connect them via a synchronous belt. One synchronous wheel is directly connected to an electric motor, which forces the other to turn, moving the reader attached to the synchronous belt.
A

The prototype system.
The following parts are required for the electric motor control: electric motor, gear reducer, and micro-controller. The speed of the electric motor is relatively high, which is not suitable for starting, stopping, and slower movement. The gear reducer decelerates the higher speed motor, increasing torque in the process. Pulse signals are generated by the micro-controller to start and stop the motor, select forward or reverse rotation, and select and regulate the speed. Figure 3 demonstrates the fundamental components of the motor control. According to comments given by the personal computer, the MCS-51 single-chip microcomputer generates pulse signals which are taken by the stepper motor drivers to convert them to motor motion.

Motor control components.
Table 1 shows the cost of main parts of the prototype system. The reader accounts for 70% of the cost of the system. RILS needs only one reader that makes it more affordable.
Parts and fees.

Localization algorithm
In this section, two localization algorithms, skip scanning and continuous scanning, are presented to locate a single tagged object. Also, a theoretical analysis is conducted to compare the performance of those two algorithms.
Continuous scanning
Traditionally, readers are deployed in strategic locations in a warehouse. When a reader detects a tagged object, the rough location of the tagged object is within a circle centered at the reader and with a maximum radius equal to the read range.
It is well known that placing disks at the centers of regular hexagons, which are also called cells, is optimal, in terms of the number of disks needed to achieve full coverage of a plane. The skip scanning algorithm realizes the seamless coverage by sampling signals from the reader on hexagonal lattices. This algorithm terminates when the reader locates the tagged object or completes scanning the whole warehouse. The estimated location of the tagged object is the last location of the reader. The skip scanning is a coarse-grained localization. Although simple and effective, the skip scanning, both search time and localization accuracy, largely depends on the read range of the reader. If the reader decreases the read range to achieve higher localization accuracy, it will take a long time to move back and forth or up and down to search the tagged object.
Roughly, a reader can read a single tag 20 times per second,
21
which enables it to continuously scan the tagged object.22,23 A continuous scanning algorithm is proposed to improve the localization accuracy and shorten the localization time. Compared with the skip scanning, the continuous scanning is a fine-grained localization. Suppose that the width and length of the warehouse are

An example of the continuous scanning.
The reader moves from


Then, the following equations are solved



The coordinate of the tagged object may be
Following three factors may adversely affect time cost and accuracy of the localization algorithm: (1) the overlapped scanning regions, (2) the high-speed sampling rate and appropriate moving speed, and (3) the suitable read range.
Time–cost analysis
A comparison is made for the time cost of two proposed algorithms. Assume that the reader moves with speed

Then, a given tagged object is located by the continuous scanning and the time cost is recorded. Assume that the coordinate of the tagged object is

In summary, the continuous scanning takes
Accuracy analysis
Another comparison is made for the accuracy of two proposed algorithms. Assume that the coordinate value of the reader is
For the continuous scanning, the tagged object is approximately located at

For the skip scanning, the tagged object is approximately located at

Inequalities (8) show that the localization accuracy of continuous scanning is better than the skip scanning when
Scheduling algorithm
In this section, a scheduling algorithm, called category-based scheduling, is proposed to manage the reader movement and locate multiple tagged objects.
Problem formulation
To monitor some valuable items, we need to obtain their location frequently even though they are static. A localization request will be generated to check whether a certain item is in the right place at the right time. To handle multiple requests, we should determine a scan path, which is the motion of the reader. The first come first served (FCFS) scheduling algorithm is a straightforward solution whereby requests are attended to in the order that they arrived. When processing a localization request, the algorithm extracts object’s category ID from object’s tag ID and then moves the reader to the corresponding area. The algorithm is intrinsically fair, but it generally does not provide the fastest service.
The problem of finding the optimal scan path for the reader can be modeled by the DTSP. As items from different categories are placed in different storage areas, we view each storage area to be scanned as a vertex in a complete graph (the reader can move to any storage area), and then find the minimum-weight Hamiltonian cycle in the graph. Note that the “vertices” have some dynamic properties as their number may change with time: (1) their number will increase when new requests arrive; (2) their number will decrease when old requests are processed. Suppose that vertex

Assume that the number of storage areas is

Given a complete and undirected graph

where
Category-based scheduling
The category-based scheduling is a practical solution to DTSP, which is an NP hard problem. Such an algorithm samples
Receiving
This algorithm receives requests for the location of tags. It contains the following four steps: (1) it waits for receiving localization requests (each of them contains a tag ID), (2) it extracts the category ID from the tag ID, (3) it finds the vertex that is associated with the extracted category ID, and (4) it adds the request into the pending queue of the associated vertex. The pseudo-code of the algorithm is shown in Algorithm 1.

Updating
The optimal scan path is updated by the algorithm at each time interval,

Part one collects all vertices that require to be scanned within next interval,
Part two applies the 2-approximation algorithm
24
to find the optimal scan path for the reader. Note that though
Suppose

This algorithm is very simple and efficient in practice and the overall time complexity is
Selecting
This algorithm selects the next vertex to be scanned when the reader completes scanning a vertex. Suppose that the reader arrives at vpre’s exit, the next vertex,

To avoid starvation,
The basic idea of this algorithm is same as elevator algorithm. The reader starts at one end of the tour and moves toward the other. It is servicing requests as it reaches each vertex until reaches the other end of tour. At the other end, the tour is refreshed, and servicing continues.
Performance evaluation
In this section, the performance of RILS is evaluated in terms of localization error and time cost via experiments.
Localization error estimation
An experiment is designed to estimate the error of the read range
Figures 5–7 describe the detection rates (number of detections to be scanned of per total number) for different tags in the vertical plane. For each tag, the detection rates are set from 200 scans. The results indicate that the read region is not an regular area with a clear boundary. Actually, the shape of the read region is affected by numerous factors, such as reader and tag antenna patterns, the valid radiated power, and the antenna position. The irregular read region may lead to localization errors for both skip and continuous scanning. It can also be seen that
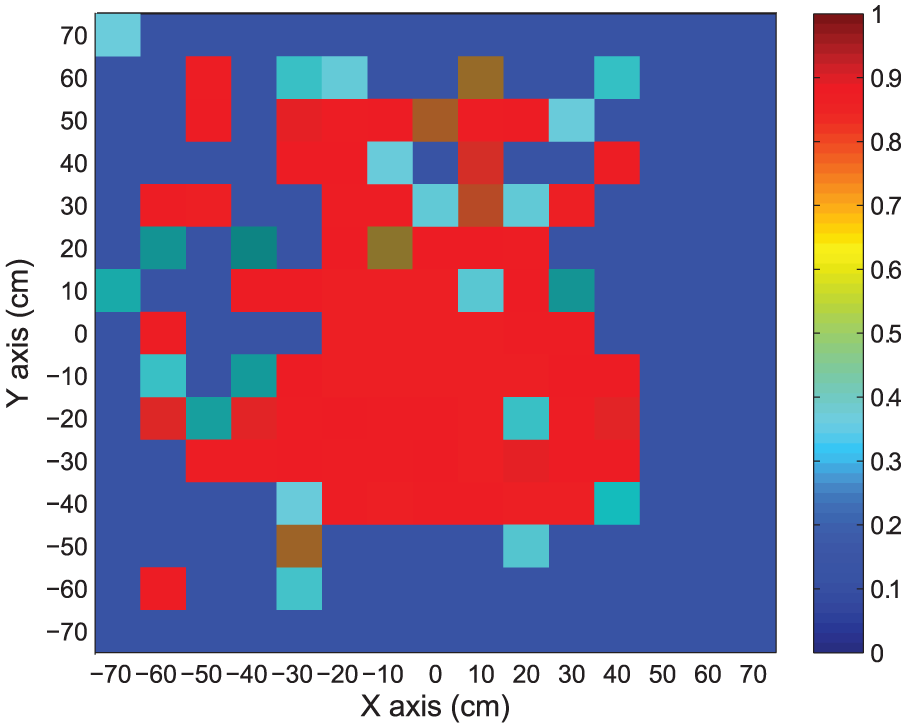
The detection rate (50 cm).

The detection rate (100 cm).
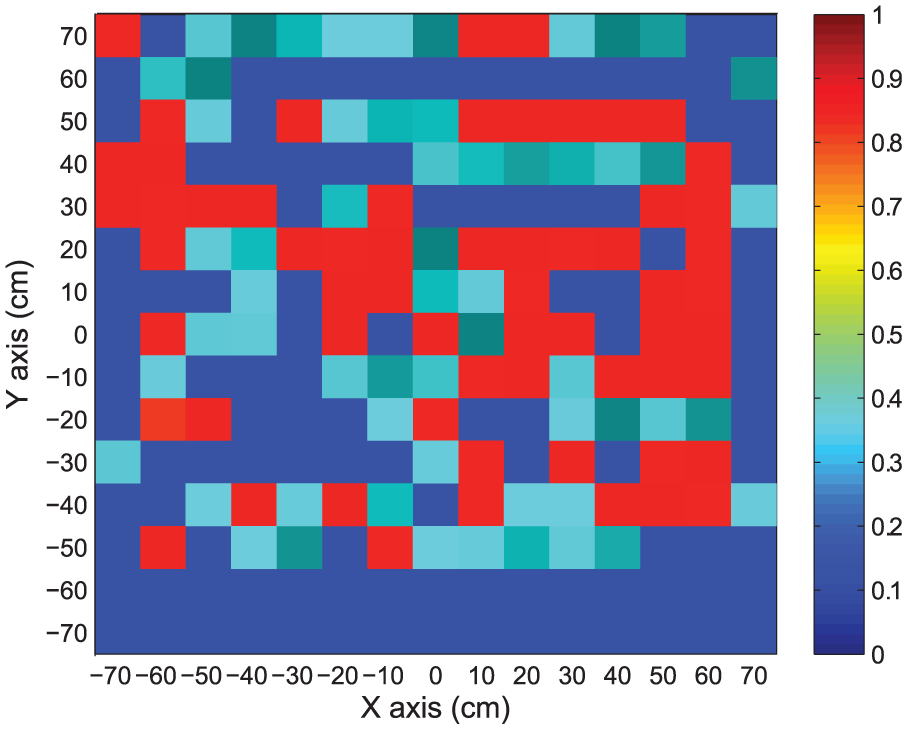
The detection rate (150 cm).
Localization algorithm comparison
Next, the continuous scanning is compared with the skip scanning from aspects of localization time and accuracy. The antenna is installed 50 cm above the ground floor and

Localization time.
Figure 9 shows that the continuous scanning has the higher accuracy compared to skipping scanning. The average localization error for the continuous scanning is 8.9 cm, which is about 60% of that for the skip scanning.

Localization accuracy.
Scheduling algorithm comparison
Then the category-based scheduling is compared with FCFS scheduling in terms of time cost. In total, 10 tags are set randomly in a

The category ID for each request.

The comparison of time cost.
The TSP tour determined by Algorithm 2,

The TSP tour (5 s).

The TSP tour (10 s).
Figure 14 depicts the sequence of vertices scanned by the reader. It can be seen that the sequence for the category-based scheduling is

The sequence of vertices scanned.
Conclusion
In this article, RILS is designed and implemented for warehouse searching and stock-taking. Such a system can achieve high accuracy in the passive tag localization without the support of either RSSI function or reference tags. An effective architecture, which consists of two guide rails, is built to enable the reader to move horizontally and vertically. With such an architecture, a reader can be used to locate a tagged object placed at any position and scan the whole warehouse as well. Also, two novel algorithms, continuous scanning and category-based scheduling, are proposed for locating single and multiple tagged objects, respectively. Compared with the skip scanning, the continuous scanning narrows the possible location range of a tagged object from a region to a single point. The category-based scheduling considers the clustering of goods or items and optimizes the process to handle multiple requests. Our theistical analysis and experimental results show that the proposed architecture and algorithms can reduce system cost and localization time and improve the localization accuracy.
Footnotes
Handling Editor: Nan Cheng
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by National Nature Science Foundation of China under Grant No. 61602093.