
Abstract
Multi-carrier code-division multiple access is an important technical means for high-performance underwater acoustic sensor networks. Nevertheless, severe multiple access interference is a huge challenge. As the core technology, multi-user detection is used to eliminate multiple access interference. The traditional optimal detection algorithms (e.g. maximum likelihood) have very high computational complexity, and the performances of suboptimal detection methods (i.e. zero forcing, minimum mean square error, etc.) are poor. Therefore, taking into account the characteristics of underwater acoustic sensor networks, it is of great significance to design multi-user detection algorithms for achieving a tradeoff between the detection performance and the computational complexity in multi-carrier code-division multiple access systems. In this article, we design a transmitter model of underwater multi-carrier code-division multiple access system and then implement a multi-user detection algorithm based on convex optimization, which is named convex optimization–based algorithm. Next, we conduct the detection performance and computational complexity comparisons of maximum likelihood, zero forcing, minimum mean square error, and convex optimization–based algorithm. The results show that the performance of convex optimization–based algorithm is close to that of maximum likelihood, and the complexity is close to that of zero forcing. Therefore, a tradeoff between the computational complexity and the detection performance is realized in convex optimization–based algorithm. It means that convex optimization–based algorithm is suitable for the multi-user detection in multi-carrier code-division multiple access systems of underwater acoustic sensor networks.
Keywords
Introduction
Recently, underwater acoustic sensor networks (UASNs) have emerged as the key enabler of a wide range of applications,1–3 such as marine data acquisition, environmental monitoring, subaquatic resource survey, earthquake and tsunami monitoring, auxiliary navigation, and submarine robots. UASNs are composed of a series of sensor nodes, which are randomly deployed in the specified underwater region. It is well known that radio frequency (RF) and optical signals do not propagate properly in the water,4,5 and thus, acoustic communication is the best choice. However, there are several challenges, 6 including extremely high path loss, severe multipath effects, Doppler diffusion, limited bandwidth, fast channel varying, and so on.
Multi-carrier code-division multiple access (MC-CDMA) is a multiple access scheme combination CDMA and orthogonal frequency-division multiplexing (OFDM), allowing the system to support multiple users at the same time. CDMA uses single carrier spreading and isolates multi-user data by spreading codes to provide multiplexing. OFDM can effectively reduce bit error rate (BER) and inter-symbol interference (ISI).7–9
MC-CDMA inherits the advantages of OFDM and CDMA. 10 It divides the high-speed data flow into multiple parts of low-speed and then modulates the data flow to distinctive subcarriers, to obtain frequency diversity. In this way, the anti-multipath interference (MPI) capability of the system is improved, and a higher data rate is provided.
In an MC-CDMA system, there are two kinds of interferences, mainly the MPI 11 and multiple access interference (MAI). 12 MPI means a phenomenon in the physics of waves whereby a wave from a source travels to a detector via two or more paths, and under the right condition, two (or more) components of the wave interfere with each other. MPI can be eliminated with OFDM. MAI means the user symbols alias in both time domain and frequency domain. It will destroy the orthogonality between spread codes. In general, MAI needs to be eliminated by multi-user detection (MUD) techniques.
Some MUD algorithms13,14 have high computational complexity, and the others have poor performance. Since UASNs are energy-limited systems, all nodes are powered by batteries, and the high computational complexity will result in rapid energy depletion. It will shorten the survival times of systems dramatically. Therefore, it is necessary to make a tradeoff between the performance and computational complexity of MUD in MC-CDMA-based UASNs. 15
Convex optimization is a nonlinear mathematical programming problem. It has the characteristic that the local optimal solution is the global optimal solution. 16 Currently, convex optimization is widely used in signal processing, communication and network, combinatorial optimization and global optimization, and so on.
The rest of the article is organized as follows. Section “Related works” introduces related work. Section “MUD based on convex optimization” presents the MUD method based on convex optimization. Section “Simulation” describes the simulation process, and section “Conclusion” concludes this article.
Related works
In UASNs, due to the simultaneous communication of multi-nodes, it will cause serious signal interference. To distinguish the sensing signal among different nodes, the implementation of MUD becomes an important technical means. It is showed that MC-CDMA can effectively combine all the energy of the received signal in the frequency domain. At the same time, a fast Walsh–Hadamard transform17,18 can be made for spreading and dispreading in a single sub-channel to improve the computational efficiency of UASNs.
Y Jiemin et al. 19 propose an MC-CDMA scheme in design of UASNs. The preliminary results of simulation and pool testing indicate that MC-CDMA is a feasible method for designing the physical layer of UASNs. VK Trivedi et al. 20 present the performance analysis of full-load and overload MC-CDMA transmission scheme over underwater acoustic channel. The authors use Walsh–Hadamard and carrier interferometry (CI) spread codes for the full-load case and use pseudo orthogonal (PO)-CI code for the overload case. Thus, a tradeoff is established between the system capacity and performance. H Fang et al. 21 implement an MC-CDMA system via carrier interferometry codes in an underwater acoustic channel. Both the simulation and tank experiment prove that the proposed scheme is feasible, and a tradeoff relation exists between diversity gain and user capacity as well as between spread spectrum gain and system efficiency.
F Li et al. 22 design an underwater acoustic communication scheme in MC-CDMA based on differential modulation. In the article, the channel estimation processing can be eliminated, and the complexity of the system can be reduced. H Fang and X Hu 23 introduce an equivalent subcarrier method for underwater MC-CDMA systems and design an adaptive modulation technology based on greedy distribution algorithm. The results show that BER is improved greatly. F Kong et al. 24 carry out the performance simulation of MC-CDMA system, and the results show that MPI in underwater acoustic communication can be solved better. E Calvo and M Stojanovic 25 propose an MUD algorithm based on the cyclic coordinate descent method, to find the reduced complexity versions of maximum likelihood (ML) detector for highly distorted underwater channels. The algorithm has been tested using real data obtained over a 2-km shallow-water channel in a 20-kHz band and demonstrated good results.
G Liu and W Kang 26 design a compressed sensing (CS) MUD scheme for large-scale UASNs. Simulation results show that this scheme has sufficient capability to resist packet error during MUD. G Yang et al. 27 present a Kalman filter–based MUD algorithm for underwater acoustic communication networks. The experiments show that the algorithm can be used to improve the system capacity effectively. W Zeng et al. 28 introduce a fast estimation algorithm for underwater acoustic sparse channel based on convex optimization. The advantages of the algorithm are fast convergence and low complexity, but it cannot be applied to the underwater acoustic environment with low signal-to-noise ratio (SNR). S Wang et al. 29 construct an iterative multi-user detector by relaxing ML as a convex optimization problem and then solve the problem through the non-monotone spectral projected gradient method. Simulation results show that it outperforms minimum mean square error (MMSE). Y Chen et al. 30 present a convex optimization–based beamforming algorithm. Simulation results show that the algorithm is robust against the steering vector mismatch and can achieve better performance than other existing algorithms for the underwater sensor array.
DA Guimarães et al. 31 put forward a noise reduction technique based on convex optimization for underwater acoustic communication systems. The results show that the proposed technique can significantly reduce the ambient noise and BER of UASNs. Y Yan et al. 32 design a convex optimization method for underwater passive source localization. In the article, a semi-definite programming (SDP) method is used to convert the non-convex problem into the convex optimization problem. Compared to the least-square (LS) method, it achieves more accurate results and has better robustness with less number of sensor nodes and with lower SNR.
To sum up, the above-mentioned works demonstrate that MC-CDMA can greatly improve the performance of UASNs. Some studies prove that the non-convex problem is transformed into convex optimization problem, which can reduce the computational complexity and achieve local optimum. In this article, an MUD algorithm is proposed based on convex optimization. To the best of our knowledge, it is the first article that introduces MUD method based on convex optimization for MC-CDMA system in UASNs. The main propose of this work is to make a tradeoff between the detection performance and computational complexity of MUD for the MC-CDMA systems in UASNs.
MUD based on convex optimization
Transmitter model of MC-CDMA for UASNs
We consider an MC-CDMA system for underwater sensor networks, in which signals are transmitted and received via hydrophones (modems). A hydrophone is attached to an underwater node. When transmitting, a hydrophone modulates the data sensed by a node into acoustic signal. On receiving, it demodulates acoustic signal into data. A transmitter model of the MC-CDMA system for UASNs is used to spread the original signal in the frequency domain, as shown in Figure 1.

Transmitter model of an underwater MC-CDMA system.
Let
The output signal will enter the corresponding spread spectrum module and expand the data into
The Walsh code 35 is generally used by the spread spectrum sequences, where all the sequences are orthogonal to each other. In an underwater MC-CDMA system, if the timing synchronization and channel estimation can be ensured, the orthogonality of spread codes between different users can be restored easily. So the maximum number of users is equal to the length of spread codes, which improves the system capacity accordingly.
In an uplink MC-CDMA system of UASNs, the received signal is subjected to fast Fourier transform (FFT), which can be represented by a matrix, as shown in equation (1)

In equation (1), let

Related MUD techniques
In MC-CDMA systems, the MUD techniques are divided into two types, which are the optimal detection methods and the suboptimal detection methods. It is well known that ML is the optimal method, and zero forcing (ZF) and MMSE are the suboptimal methods which are widely used currently.
ZF
It is a linear detection method, which requires satisfying the constraint, as shown in equation (3) 36

where
where

Form equation (5), it reveals that the noise will be affected by ZF, and the noise signal will be amplified. Therefore, the reliability of detection method will be affected.
MMSE
MMSE is a detection method with high performance and can be easy to implement. The algorithm is designed to achieve that the MSE is minimized between the transmitted signal of a user and its estimated value. In MMSE, the generalized inverse matrix

Let
The MSE matrix of

From equation (8), we can see clearly that
ML
Verdu proposed ML detection method based on the matching filter and Viterbi algorithm 40 in 1986. In ML, if the channel characteristics are known, the detection algorithm will search for all the possible signal vectors, as shown in equation (9)41,42

where

It is showed that ML can achieve the minimum error probability theoretically, which is the optimal detection method under additive white Gaussian noise (AWGN) channel. Nevertheless, in the case of higher order modulation or a large number of transmit antenna, the computational complexity is extremely large. The computational times rise exponentially with an increase in users. If the number is
Convex optimization–based MUD
Assuming that the channels are known and independent of each other in an underwater MC-CDMA system. To design a detection method, of which the performance is close to that of ML, we modulate the uplink data and simplify equation (10) as equation (11)
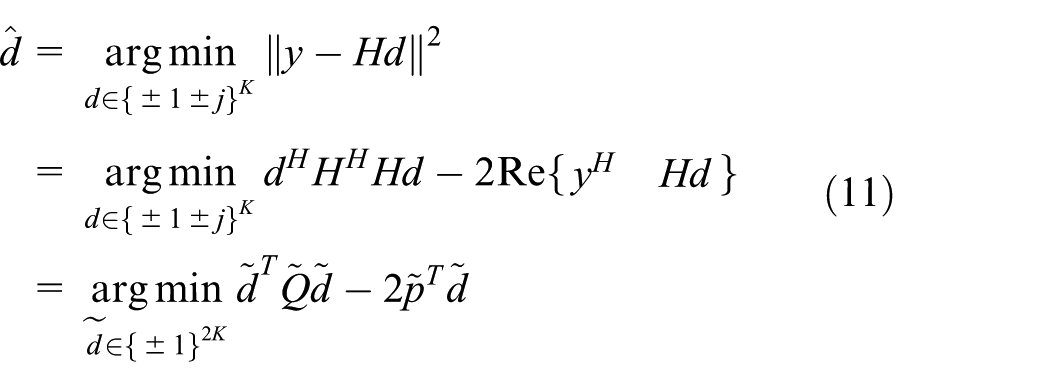
It is known from equation (11) that a vector with a dimension

To facilitate computing, we add a variable

And equation (13) can be simplified as equation (14)

In equation (14), the objective function is a quadratic equation, which is a symmetric matrix. So we come to

where
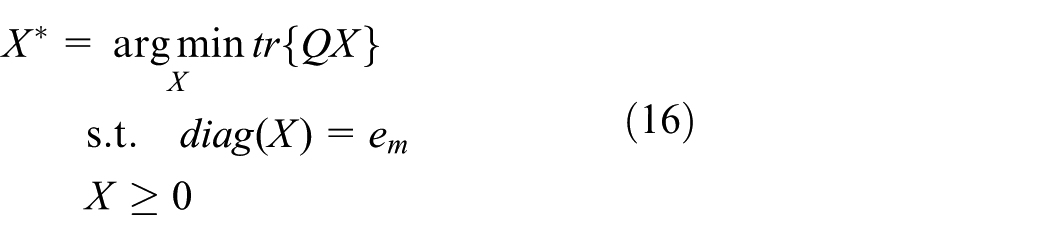
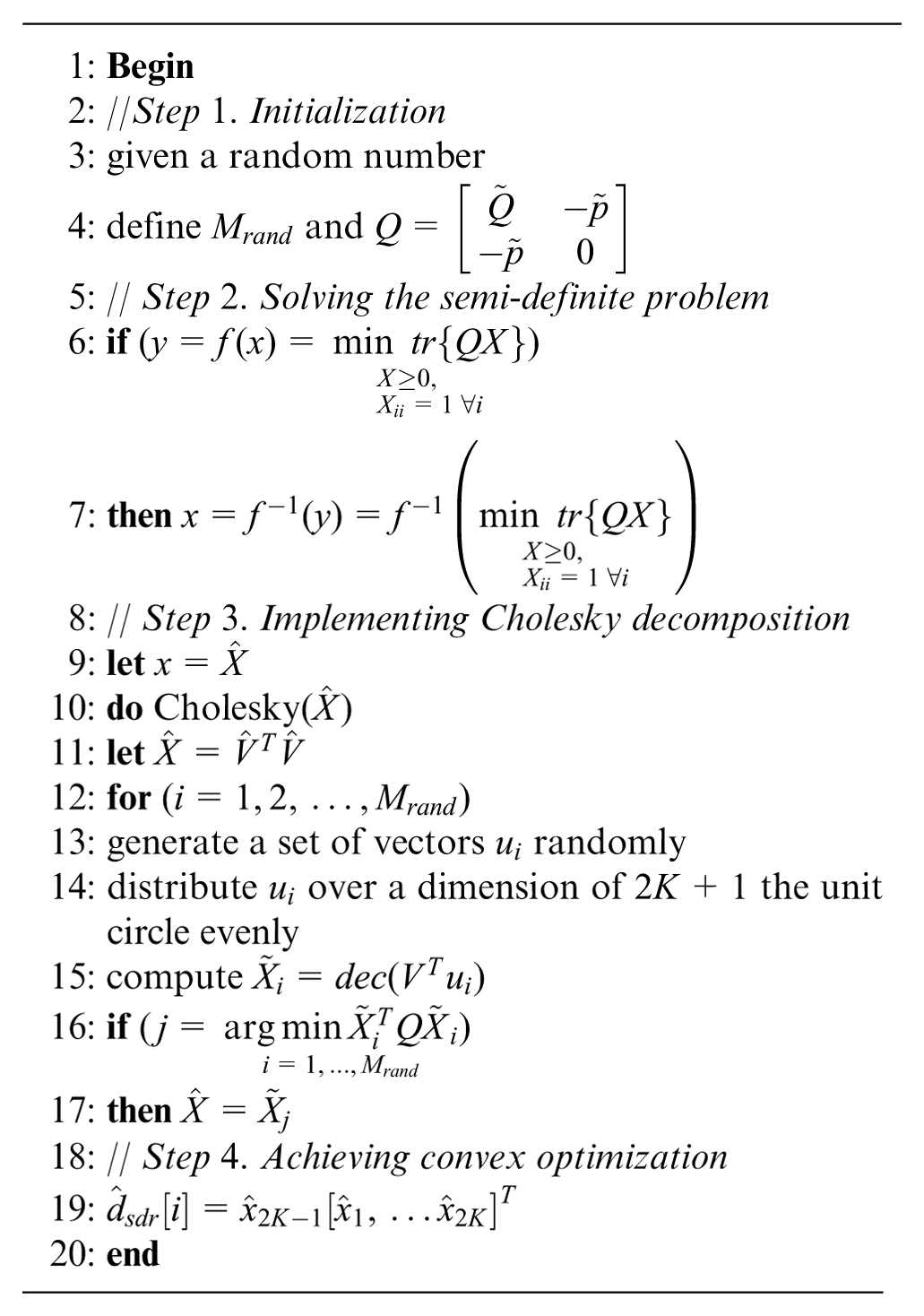
Equation (16) is the semi-definite relaxation (SDR)45,46 of equation (15) after semi-definite processing. Based on SDR, equation (16) is converted to be a convex optimization type, as shown in equation (17)
Finally, we conduct convex optimization according to equation (17). The convex optimization–based algorithm (COBA) mainly includes initialization, solving the semi-definite problem, implementing Cholesky decomposition,47,48 and achieving convex optimization in four steps. The related pseudo-code is described as follows:
Simulation
Experimental setting
In the experiment, we use a single acoustic modem (sink node) and multi sensor nodes (users) to construct the underwater MC-CDMA system. We assume that the system is deployed in a shallow sea region with a depth of less than 200 m.
It is showed that the acoustic channel in a shallow sea obeys Rice distribution 49 when the communication distance is short (<200 m), while the long-distance (>3 km) communication follows Rayleigh distribution. 50 In this article, we adopt these two channel models and design MC-CDMA systems of 4, 8, 10, and 12 users, respectively. Next, we perform four MUD algorithms (COBA, ML, ZF, and MMSE) for comparing the detection performance and the computational complexity.
In the experiment, the propagation speed of acoustic is set to 1500 m/s, 51 given the reflection coefficient 52 of sea floor is 1 and that of sea surface 53 is −1. Table 1 lists the main settings of the experiment. The other conditions such as temperature, salinity, depth, and tide are ignored.

IFFT: inverse fast Fourier transform; FFT: fast Fourier transform.
Detection performance based on Rice channel
BER is an important indicator of MUD algorithm. 57 In UASNs of short-range communication systems, the multipath effect of the acoustic signal during transmission will result in the received signal being the superposition of the direct signal (main signal) and the multipath signal, therefore the envelope of the received signal is subject to Rice distribution. Figure 2 shows the performance comparison of four algorithms based on Rice channel with systems of 4, 8, 10, and 12 users, respectively.
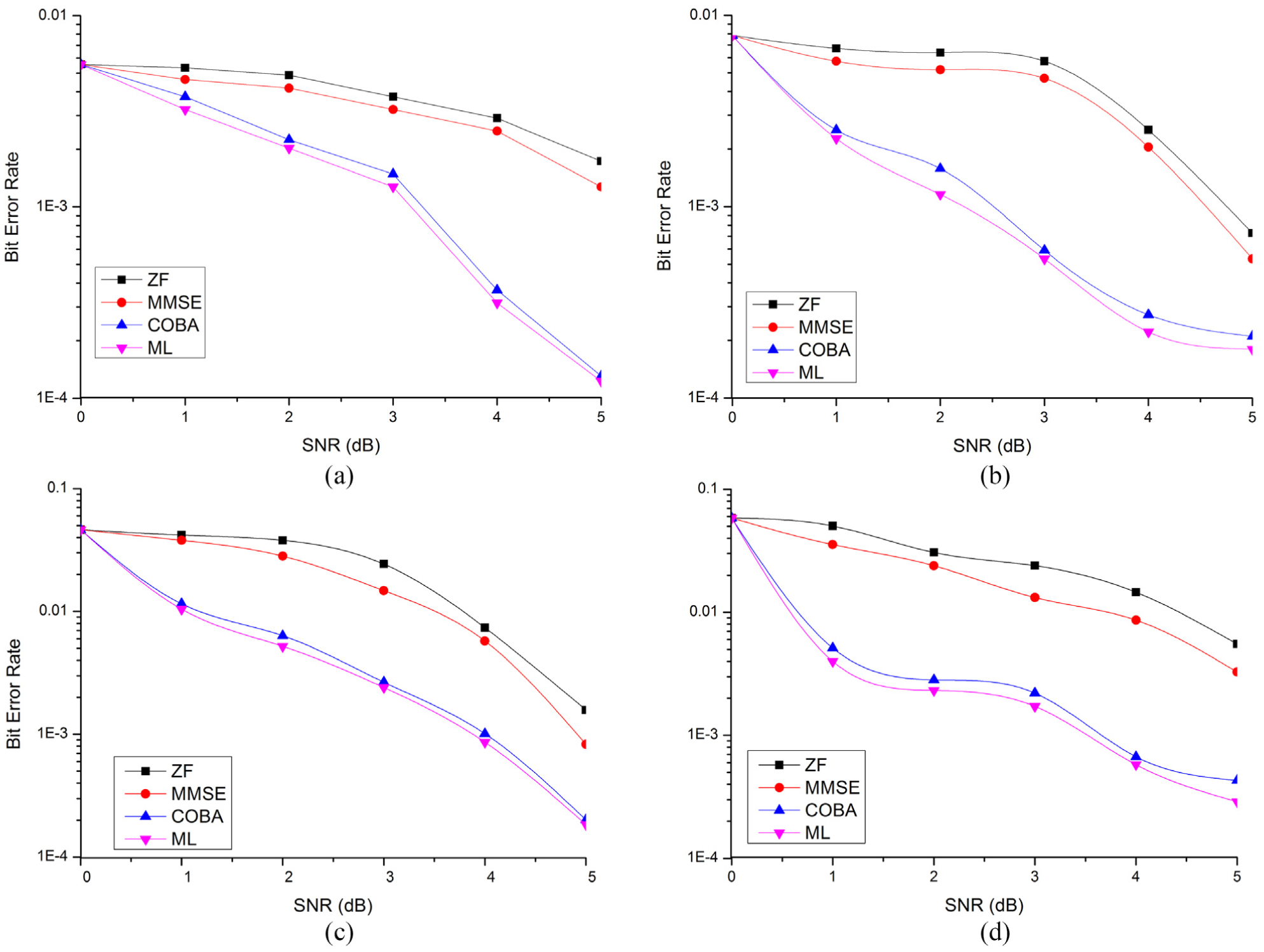
Detection performance based on Rice channel: (a) the system of 4 users, (b) the system of 8 users, (c) the system of 10 users, and (d) the system of 12 users.
It is showed that under Rice channel, the detection performance of ZF is close to MMSE, and that of COBA is close to ML. With the increase in SNR, all the algorithms show a decrease in BER. As the number of users increases, the detection performance of the four algorithms generally decreases. Relatively speaking, BER decreases most in ML.
Detection performance based on Rayleigh channel
Considering that there are many obstacles in UASNs of long-distance communication, thus, there is no line of sight 58 (LoS) signal, and the acoustic signal fading is serious. In this case, we use Rayleigh channel to quantify the underwater acoustic channel and compare the detection performance of the corresponding four algorithms. Figure 3 shows the performance comparison of four algorithms based on Rayleigh channel with systems of 4, 8, 10, and 12 users, respectively.

Detection performance based on Rayleigh channel: (a) the system of 4 users, (b) the system of 8 users, (c) the system of 10 users, and (d) the system of 12 users.
The simulation results show that the BER of ML is the best, and that of COBA is close to ML. In contrast, BER of ZF is highest, MMSE can achieve balancing between MAI and noise amplification, and thus, its BER is lower than ZF. As the interference caused by multiple access increases, the BER of the four algorithms will decline, but ML will still keep the best performance, and the performance of COBA is still close to ML.
The computational complexity
In an MC-CDMA system, the computational complexity of MUD algorithm mainly includes two parts, which are complex multiplication and complex addition. 59 Figure 4 shows the computational complexity of the four algorithms. The vertical coordinate denotes the computational complexity, that is, by counting the average number of floating point calculations required for each transmitted signal vector. The abscissa means the SNR.

Comparison of computational complexity: (a) the system of 4 users, (b) the system of 8 users, (c) the system of 10 users, and (d) the system of 12 users.
From Figure 4, it is clearly evident that the computational complexity of ML is relatively high, and as the number of user increases, the complexity increases exponentially. The complexity of MMSE is lower than that of ML, but also shows an exponential increase, and that of COBA is slightly higher than ZF, which is still lower than that of ML and MMSE. In contrast, the complexity of COBA and ZF presents a nearly linear increase.
Conclusion
In this article, an MUD algorithm based on convex optimization is designed, which is named COBA. We conduct performance comparisons of the four algorithms (ML, ZF, MMSE, and COBA) under Rayleigh channel and Rice channel. The results show that under the constraints of these two channel models, the performance of ML is the best, and that of COBA is close to ML. Next, we test the computational complexity of the four algorithms. The simulation indicates that the computational complexity of ZF is the lowest, and that of COBA is close to ZF. Therefore, a tradeoff between the computational complexity and the detection performance is realized in COBA. It means that the MUD method based on convex optimization is suitable for the MC-CDMA system in UASNs.
With the development of UASNs, the design of underwater sensor network based on software defined networks (SDNs) becomes a new research tendency. At present, we have implemented virtual switches and controllers 60 for UASNs and built the virtual multiple-input multiple-output (MIMO) nodes to implement multi-hop relay communication. In the underwater MC-CDMA systems of virtual MIMO cooperative communication, the MUD method based on convex optimization is the next task of the future works.
Footnotes
Acknowledgements
The authors would like to thank the referees for their constructive comments, the Editor-in-Chief for helpful suggestions, and the reviewers of the article who helped in improving this article significantly.
Handling Editor: Jaime Lloret
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in this article is supported by the National Natural Science Foundation of China under grant no. 31371525 and the Key Scientific and Technological Project of Henan Province grant no. 172102210267.