
Abstract
It is a common understanding that the localization accuracy can be improved by indoor maps and inertial sensors. However, there is a lack of concrete and generic solutions that combine these two features together and practically demonstrate its validity. This article aims to provide such a solution based on the mainstream fingerprint-based indoor localization approach. First, we introduce the theorem called reference points placement, which gives a theoretical guide to place reference points. Second, we design a Wi-Fi signal propagation-based cluster algorithm to reduce the amount of computation. The paper gives a parameter called reliability to overcome the skewing of inertial sensors. Then we also present Kalman filter and Markov chain to predict the system status. The system is able to provide high-accuracy real-time tracking by integrating indoor map and inertial sensors with Wi-Fi signal strength. Finally, the proposed work is evaluated and compared with the previous Wi-Fi indoor localization systems. In addition, the effect of inertial sensors’ reliability is also discussed. Results are drawn from a campus office building which is about 80 m×140 m with 57 access points.
Introduction
In recent years, with the development of Internet of Things (IoT) applications and mobile computing, there is a growing concern about indoor location information. Therefore, indoor localization attracts increasing interest. Although the accuracy can reach to centimeter level through the use of ultra-wideband (UWB),1,2 infrared, 3 radio frequency (RF), 4 beacon, 5 multi-antennas, 6 and so on. Those systems need to deploy extra facilities, such as UWB transmitters and receivers. Nowadays, given that many buildings are equipped with Wi-Fi access points (APs), Wi-Fi localization becomes much acceptable by users.
However, Wi-Fi-based indoor localization is particularly challengeable since the radio signal is affected by many external factors, such as reflection, refraction, multi-path, shadow fading, scattering, and temporal dynamics.7–10 These interferences lead to a large deviation in pure Wi-Fi-based localization. Therefore, the introduction of other beneficial information for positioning is quite necessary.
Now that mobile terminals (phones, tablets, etc.) own built-in inertial sensors (magnetometer, accelerometer, etc.) which can be included to modify users’ trajectories. 11 Since many sites provide their own indoor maps online, the tracking service can achieve a better level (more smoothly by avoiding trajectories to pass-through walls) using the map information. 12 Thus, it is obvious that through indoor maps and inertial sensors, the localization accuracy can be significantly improved.
Nonetheless, there is lack of a mature scheme to fuse map and sensor data with Wi-Fi-based indoor localization. Because of the existing sensor noise, continuous use of inertial sensors causes a great drift. 13 As a result, utilizing the original data produced by inertial sensors to correct the localization error 14 may not improve the accuracy as well as expected. Sometimes, employing the inertial sensors data with increasing drift may lead to worse results. Thus, the original information from inertial sensors requires further processing. As fixed resolution pictures, maps that used in many previous indoor localization systems provide little information (e.g. hallways, walls).12,15 Therefore, to offer adequate information, a much more refined map technique is needed.
Researchers also assume that the positioning accuracy of fingerprint-based indoor localization method depends on the number of reference points in the database. 16 A larger database consumes more training time and computational resources. However, this is a pseudo-proposition and we give a theoretically proof in this work.
In this article, we propose that the reference points placement theory in section “Reference points placement theory” to prove localization accuracy will not continue improved by adding new reference points when distances among reference points are less than a lower bound. Leveraging this theory, indoor localization systems can achieve a high accuracy with less training time by setting a minimum distance (noise distance) between reference points.
Although the theory can guide to place reference points, when the indoor environment is large, the fingerprint database can also be huge. As a result, determining the location is a complex calculation process. Facing the heavy computational cost with restricted resources and power, we employ a two-stage model to localize the devices. First, coarse localization, the position is located into a candidate set with a small size. Second, precision localization, the position is finally given from the candidate set.
In the coarse localization and training phase, a cluster technique is utilized to classify Wi-Fi fingerprints. A Wi-Fi signal propagation-based cluster algorithm is proposed in section “Offline phase.” The cluster algorithm reduces the amount of computation and improves the clustering speed compared with the existing ones.17–19
Our localization system forms a maximum reference point set based on the vector graphic map 20 and reference points placement theory. These reference points generate a Markov chain that is used to represent users’ all possible movement routes with the constraint of walls. The phenomenon of trajectories pass-through walls can be avoided through Markov chain. Users’ movement information (such as step lengths, directions) can be obtained from inertial sensors (e.g. accelerometer, magnetometer). In this way, the tracking service can provide a smooth experience.
The main contributions of this article can be briefly summarized as follows:
We propose a reference points placement theory. The theory gives a theoretical guide to place reference points.
We present a Wi-Fi signal propagation-based cluster algorithm. The algorithm reduces the amount of computation by adapting to the propagation nature of Wi-Fi signal.
We present and implement a fingerprint-based Wi-Fi indoor localization approach which fuses map, inertial sensors, and received Wi-Fi signal strength. Considering the drift of the inertial sensors and inaccuracy of Wi-Fi signal, the parameter, reliability, is proposed in the integration to provide a better accuracy system.
The rest of this article is organized as follows: section “Fingerprint-based localization model” describes the fingerprint-based indoor localization method and the improvement we did on the model. In section “Using map and inertial sensors in Wi-Fi indoor localization” and “The integration of map, inertial sensors, and Wi-Fi RSS in tracking phase,” the fusion of map information, inertial sensors, and Wi-Fi indoor positioning system is discussed, and the usage of map information and inertial sensors in the localization system is introduced in detail. The localization accuracy is evaluated and compared with the previous Wi-Fi indoor localization systems in section “Experiment.” Finally, we give a brief conclusion in section “Conclusion.”
Related work
A majority of previous localization systems determine the system status through Wi-Fi signal strength survey. Generally, these systems fall into two categories: model-based and fingerprint-based approaches.
Model-based approach
This kind of approach is widely used in wireless sensor networks.21–23 They estimate the propagation distances from APs by the measurement of received signal strength (RSS) and a path loss model and then calculate the location using a localization technique such as triangulation. Thus, the locations of APs are required by these systems.24,25 To improve the accurate, many indoor signal propagation models are presented in previous works.26,27 Barsocchi et al. 28 present an automatic virtual calibration method of the propagation model that does not require human intervention. However, E Elnahrawy et al. 29 present a strong evidence that the limits of localization by signal strength in indoor environments are fundamental. Performance of these approaches depends on many conditions,30,31 and the orientation of antenna is the dominant factor of the signal strength. 32 All of the above studies show that the propagation of Wi-Fi signals in a complex indoor environment is unpredictable, which makes it difficult to form a common indoor Wi-Fi signal propagation model. Therefore, signal propagation model-based Wi-Fi indoor localization is not a good choice.
Fingerprint-based approach
Recently, the commonly used RSS-based indoor localization technology is fingerprint-based approach. The main idea of these methods is to match the real-time fingerprint to the recorded fingerprints and get the corresponding coordinate of the matched fingerprint. P Bahl and VN Padmanabhan 33 present RADAR, a RF-based system which is the early fingerprint-based indoor localization system. Then the IEEE802.11 signal is used as the fingerprints. 34 Now the accurate of indoor localization can achieve room-level accuracy based on ambiences feature including sound, light, color, Wi-Fi, and so on. 35 However, these features (such as light, Wi-Fi) are not static over time. The fluctuations will cause a huge deviation in localizing and tracking. The reference points are considered to be directly linked to each other in the tracking process when there is no other additional information. The lack of restriction leads trajectories to pass-through walls. Therefore, there are also plentiful deficiencies in this method.
To improve the accuracy of pure Wi-Fi-based localization, many kinds of additional information are imported. H Liu et al. 35 propose a peer-assisted localization approach to eliminate the errors. This method needs other peer devices to participate and is not realistic to implement. SP Tarzia et al. 36 use a sound fingerprint called the acoustic background spectrum to determine the location. However, the acoustic background spectrum is not constant as the time goes on. J Chung et al. 37 measure location through disturbances of the Earth’s magnetic field caused by structural steel elements in a building. However, the user of electronic devices can bring heavy interference. E Martin et al. 38 use cellular and inertial sensors to correct the accuracy. A Matic et al. 39 combine FM and Wi-Fi to make a better indoor localization system. Nonetheless, cellular and FM signals are also inaccurate in indoor environment. Thus, the changeless map and build-in sensors are the first choice to improve the accuracy of Wi-Fi-based localization.
Different from the previous works, the indoor localization system proposed in this article does not rely on specific hardware and propagation model. It not only adopts the fingerprint technique but also introduces map information and inertial sensors to reduce the errors and handles the drift of inertial sensors.
Fingerprint-based localization model
A fingerprint-based indoor localization system consists of two phases: offline phase, in which RSS samples are collected at specific positions called reference points; online phase, in which users’ locations are determined based on matching real-time collection of Wi-Fi RSS to the database.
Reference points placement theory
Before proposing the fingerprint-based indoor localization mechanism, the theory of reference points placement needs to be introduced. Suppose there are n Wi-Fi APs in the building, let

Definition 1
Recognizable
In a noisy environment, we say a Wi-Fi fingerprint

is always held, where O is the Wi-Fi fingerprint database.
To make AP k recognizable, the differences among Wi-Fi fingerprints for AP k denoted as
Definition 2
Maximum reference point set
For a set of reference points, if each fingerprint is recognizable to any other fingerprints for at least one AP, and by randomly adding another reference point, the set will not follow the recognizable attribute; we call this set a maximum reference point set.
Obviously, there are many maximum reference point sets for a specific building. Since the noise distance is not constant, the distances among reference points in maximum reference point set may not be uniform.
In many fingerprint-based localization algorithms, it seems the denser the reference points are, the more accurately the system will achieve, but it is a pseudo-proposition.
Theorem 1
Reference points placement
Adding a new reference point to a maximum reference point set will not increase the localization accuracy.
Proof
Assuming the new reference point makes reference point A unrecognizable. The real-time Wi-Fi fingerprint collected at A is

Only if equation (3) is established, the anchor point can be correctly identified as reference point A. Otherwise, it explains that the presence of the newly added reference point
Offline phase
The offline phase can be seen as the database creation phase. A database record can be expressed as
After database records are continuously stored into database, the size of database may be extremely large. In order to satisfy the real-time requirement, the calculation should be simplified. Commonly, a two-stage approach is applied.18,19 The first stage is coarse localization which reduces the number of records into a small candidate set through cluster matching. The second stage, precise localization, gives the final estimation over the candidate set. Coarse localization technology requires that all Wi-Fi fingerprint records are classified and it is easy to tell which categories (may be not one) the real-time Wi-Fi fingerprint belongs to.
In this article, a relatively simple and effective way of Wi-Fi fingerprint clustering method is proposed to offline classify all Wi-Fi fingerprints and tell categories which the real-time Wi-Fi fingerprint belongs to. Considering the nature of signal propagation that the closer to the signal source is the greater RSS will achieve. Therefore, for the fingerprints surrounding AP k, the kth RSS is bigger than the others (the distance to AP k is shorter than the distances to other APs). Then we can use the index of the biggest RSS in a fingerprint as its category. As a result, the fingerprints belonging to category k are closer to AP k than others, which means fingerprints are geographically separated into n pieces. The approach can be described as follows.
Definition 3
Wi-Fi signal propagation-based cluster approach
For Wi-Fi fingerprint

In this approach, only a sorting operation is used to estimate which class a fingerprint belongs to. Thus, the computation complexity is
Online phase
In this phase, mobile devices gather real-time Wi-Fi fingerprint F (due to the instability of the signal, the average of multiple successive measurements can be seen as the collected Wi-Fi fingerprint). The class C which F belongs to can be obtained by our cluster approach. Then a localization algorithm is used to estimate the user’s location over all the elements in class C.
There is a classic fingerprint-based localization algorithm, k-nearest neighbors (kNN). 40 This algorithm goes through the database and picks up k reference points whose fingerprints match best to the real-time one. “Match best” here means the value of equation (1) is lowest.
Let

where O represents the entire fingerprints database or fingerprints set acquired from coarse localization stage, and F is the real-time Wi-Fi fingerprint

Ultimately, the coordinate
Tracking
Wi-Fi-based indoor tracking can be described as the continuous localization processes for users which is based on a predetermined time sequence real-time Wi-Fi fingerprints

where
Tracking process can be divided into two steps: prediction and correction. The prediction phase is to presume current state

where f is the prediction function.
Correction is the stage to correct and update the system status by the combination of prediction information

where h is the correction function, G represents the map, and
Since the users of tracking service are on the moving, the service is required with high real-time performance. Thus, taking the average of multiple measurements as the Wi-Fi fingerprints is not acceptable because of its huge time consumption. To cope with the significant fluctuation in Wi-Fi fingerprints, a filter technique is introduced. In this article, we use a common filter, Kalman filter, which can be illustrated as

where process noise

where
The prediction for system status is

The correction for system status is

The final position estimation is obtained by the Kalman filter that integrates system state estimation with real-time Wi-Fi fingerprint. The parameter
The Kalman filter assumes process noise and observation noise follow Gaussian distribution and supposes users’ movements are linear motion models. However, in real life, these noises are not completely Gaussian distributed, and users’ movements are stochastic; therefore, utilizing pure Kalman filter will result in a large deviation.
Using map and inertial sensors in Wi-Fi indoor localization
Since pure Wi-Fi localization causes a huge error, it needs other information for error correction. In this article, vector graphic map and inertial sensors (magnetometer, accelerometer) are leveraged to improve the localization accuracy.
Using map in offline phase
To deploy a high-accurate localization service with fewest training work, there are some rules for placing reference points to obey:
The reference points should be recognizable to each other for at least one AP.
The reference points should be placed at all possible locations that users may walk to.
Reference points placement plan should be generated based on these principles, map information, the locations of APs, and a indoor Wi-Fi signal propagation model.
The algorithm can be expressed as follows.
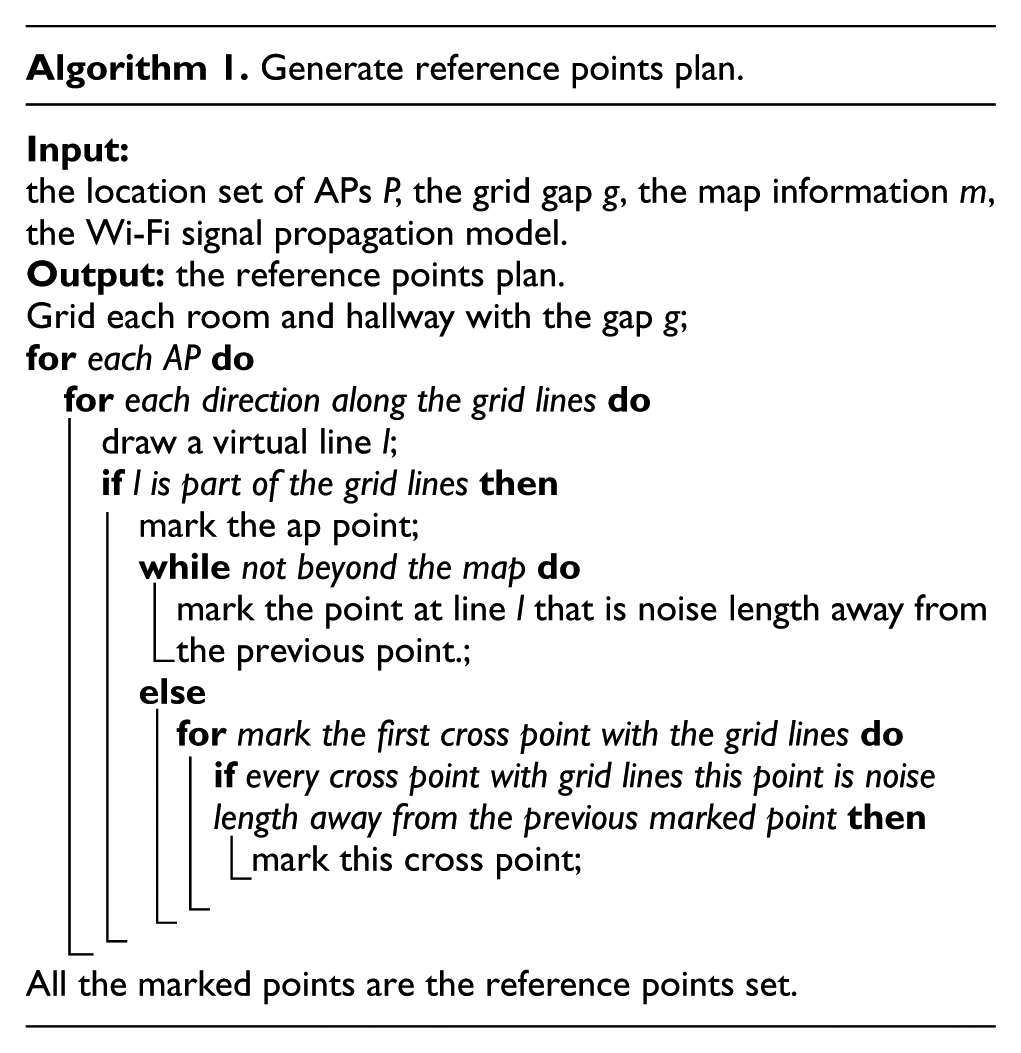
Using map in tracking phase
Nowadays, indoor maps are available for many public places and company buildings. The main idea of using the map information in tracking phase is to fuse humans behavior model and map information into a filter to form a more realistic filter with less tracking error.
The vector graphic map used in this article is constituted by the following basic structures:
vertex [id, x, y, type];
edge [id, start, end];
location [id, name, vid, polygon].
Vertex is a point structure, containing type, and coordinate field. Vertex can be used to represent the key points for floor layouts, such as the center point for a room, the midpoint for a door, the point in corridor which connects a door, corner of the corridor. Edge is a structure of the connective relation between two rooms (hallways), composed by the start and end points. The start and end points are both vertex structures. Location is the structure that represents rooms and hallways and contains a room label, topology information as vertexes.
The floor plan can be abstracted into an undirected graph. Nodes are rooms and hallways, and links are doors among them. The undirected graph shows all the available paths from the floor plan. Users can only move along the edges in the graph from one room to another or stay in one room. If the user only needs to be located to the reference point in tracking phase, this process can be represented by a Markov chain as Figure 1, and there are five actions in the system: go forward, turn left, turn right, turn back, and stay. Each state in the chain is a reference point. The probability of each action for each reference point can be obtained using a statistic way. When the system is built, the probability of each state for each possible action can be initialized with the same probability.

The Markov Chain of reference points. The
After Wi-Fi fingerprint database is collected, the corresponding Markov chain is also generated. The state space of system’s next state is restricted by the state transfer function which can be denoted as a
To make the tracking service more accurate, the possibilities are corrected by real-time Wi-Fi fingerprint

Since there exists a fluctuation for RSS over time, we introduce a system parameter
The system state can be acquired after the final calculation of the possibilities. Meanwhile, the transfer matrix will be updated according to the results

where b is the number that system state falls on state j, and a is the number that system takes the next movement to state i from state j.
However, for this tracking, when the prediction is wrong, it is hard for the system to turn to the right state. We can leverage inertial sensor data to monitor users’ movements to make a high-accurate prediction.
Using sensors in tracking phase
Because of the existence of barrier walls, the movements of people are constrained in a specific range in indoor environment. The movements can be simply classified as walking forwards and veering (e.g. turn left, turn right, turn around). Thus, heading direction is an important parameter in the system which can be gotten from inertial sensors. The walking patterns (e.g. speed) can also be obtained from them.
These information can be used to correct the filters mentioned above for the Kalman filter

where
For Markov chain model, the possibility for each transfer action can be corrected by the direction information


where
Since accelerometer and magnetometer sensor data are quite noisy, the deviations caused by these noises are gradually accumulated with the system running. Therefore, it is not accurate to sostenuto use the raw sensor data to estimate thusers’ speeds. An alternative solution is to detect the number of users’ steps and then use a step model to obtain the travel distance.
It is a common sense that each individual may have different body shapes like height and weight that influence the step length estimation. Even for the same person, steps may change over time due to variation in health status, ground types. Therefore, a static pedestrian model will not work well. Here, we propose a reliable step model for step detection and a personalization algorithm to adapt users stride length.
As shown in Figure 2, the acceleration is cyclically fluctuating with users’ walking. Because of the noise and users’ behaviors, the different between top and bottom acceleration
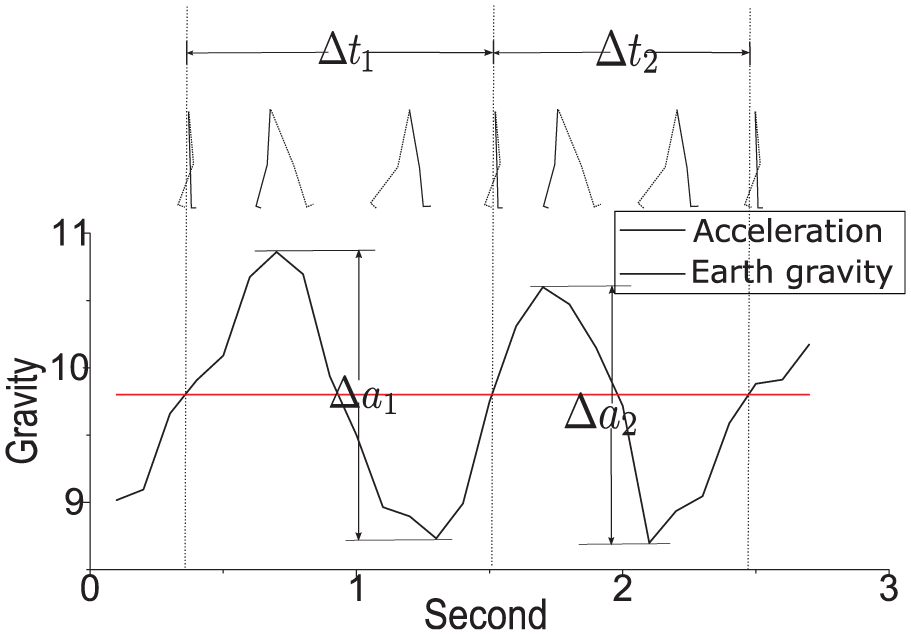
An illustration of step detection.

The integration of map, inertial sensors, and Wi-Fi RSS in tracking phase
Supposing users’ movements follow the models mentioned in section “Using sensors in tracking phase,” including walking forwards and veering. Then the users trajectories are composed of lines which is partitioned by veering positions. The main idea to use map information and inertial sensors in indoor tracking system is to find the veering position by inertial sensors raw data. And the linear trajectory is mapped into a path in the map by Wi-Fi RSS matching.
In the linear trajectory, a Kalman filter is used to evaluate the users speed. Initially, the step length is set to a common value, such as 0.75 m. When a veering is detected, we update the step length through dividing trajectory length by step number. The trajectory length can be easily estimated by finding the most possible veering location, and the length is the distance between the started and veering positions.
When a veering occurs, we can use the updated step length and new direction detected by the inertial sensors with magnetometer to reset the Kalman filter. In such approach, it not only keeps the simplicity of Kalman filter, but also overcomes its deficiencies of linear hypothesis.
The key point to fuse map information and inertial sensors is veering-judgment. Turning right/left can only happen at entrances, the corner of the hallway, and room, but turning around can occur anywhere. Veering can be predicted using a particle filter. For simplicity, the particle filter (Markov chain) is considered only at the corner of the hallway or rooms and the entrances of rooms. The system can determine whether there is a turning after receiving the data from inertial sensors and correct the system itself. If there is a turning, the system resets the Kalman filter, updates step length, and starts a new tracking state and then continues this process. “Reset” means starting a new Kalman filter process. The new Kalman filter takes the end point of the old one as the start point and changes the direction of the speed.

Experiment
The inherent characteristics of the Wi-Fi signal are introduced and verified in this section, the localization results are compared using different additional information, and the impacts for different values of
Experiment settings
All experiments in this article are conducted at floor 2, CCST (College of Computer Science and Technology) office building, Jilin University which is about a

The floor layout and the trajectory of user.
Following the setting of Potortì et al., 41 the localization error is defined as a statistic associated with the distance between the real position of the user and the estimated position of the application. To this purpose, we add some marks on the pre-defined path. When the user walks pass a mark, he can tap the screen of the smart device and the system logs the evaluated position. To illustrate the error of the trajectory, as shown in Figure 5, we use different colors to display the variance of error.
Inherent characteristics of Wi-Fi signal
Due to the existence of reflection, refraction, multi-path, and shadow fading, the RSS of Wi-Fi signal fluctuates over time, as shown in Figure 4(b). The fluctuation characteristics of Wi-Fi signal result in a great challenge for Wi-Fi indoor localization. Because of the volatility, the Wi-Fi fingerprint for the same place is unstable, which leads to a huge error in indoor localization. And this is the main reason why some other information are needed to improve the localization performance.

Inherent characteristics of Wi-Fi signal: (a) the signal changes through a wall; the coordinate of wall is 1.7 and the coordinate of the AP is 4.5 and (b) the signal changes over time.
Since the absorption capacity of walls to Wi-Fi signal is greater than air, Wi-Fi signal is easily absorbed by the walls. As shown in Figure 4(a), there is a quite obvious variation when the signal passes through the wall. 42 Because the indoor environment is divided into rooms by walls, this phenomenon will bring some positive impacts on indoor localization that the users location can be located to different rooms accurately.
Localization accuracy using additional information
Since pure Wi-Fi indoor localization is not accurate, we need some other additional information to improve the accuracy. In this system, the inertial sensors data and an indoor map are utilized to correct Wi-Fi localization. In Figure 5, the trajectories are straight using the map information (align the trajectories with the corridors).

Trail trajectories: (a) Wi-Fi tracking without any additional information, (b) Wi-Fi tracking with indoor map, and (c) Wi-Fi tracking with indoor map and inertial sensor.
Figure 3 shows a test trajectory, which begins from room 216, then passes through the hallway into another room, and goes out, after a circle around area B, eventually returns to room 216. Figure 5 shows some results of different localization methods. Figure 5(a) illustrates the pure Wi-Fi localization without any other additional information. Figure 5(b) presents the result corrected by map information. Figure 5(c) displays the performance with both map and inertial sensors to reduce the system error.
A Kalman filter is employed in the pure Wi-Fi tracking process. Because of the lack of map information, as shown in Figure 5(a), there are pass-through-wall phenomena at positions 1, 2, 3, 4. Since the system does not know the walking direction and the simple linear assumption, the system may mistake the orientation (such as positions 1, 4, 5, 6 in Figure 5(a)) under the influence of the former state.
Map information can provide additional restrictions for tracking service. As shown in Figure 5(b), the system using Kalman filter and map information avoids the pass-through-wall phenomena in tracking process. We can also observe that the localization error is smaller after turning, which is because the system uses the distance information to improve the estimation of the step size. However, without the direction information, the tracking service may fall in the wrong orientations such as positions 1 and 2 in Figure 5(b).
Inertial sensors can tell the directions that the mobile devices are heading to. Thus, the system with Kalman filter, map, and inertial sensors is much more accurate, as shown in Figure 5(c). The usage of Markov chain can predict all the probability states when the previous state is at a corner, and the inertial sensors can tell which action is the right one; thus, the system avoids the phenomena of pass-through-wall and turning wrong directions.
Figure 6(b) shows the impact on accuracy when using different additional information for indoor localization. The reliability parameter

CDF for Wi-Fi indoor localization: (a) the effect of θ’s value for tracking and (b) the accuracy using additional information.
Table 1 gives a brief performance description for different systems. It is obvious that compared with the pure Wi-Fi RSS localization, the system with the map information will bring 0.36 m gain, and the system using inertial sensors will bring 0.67 m gain. If the system fuses inertial sensors, map information, and Wi-Fi measurements, it will produce a greater gain of 0.98 m.
The mean error for indoor localization with different additional information.

Tracking accuracy with different
The inertial sensors have a high precision at the beginning and the accuracy is increasingly lowered over time. Thus, the sensors’ raw data need to be adjusted. Meanwhile, correction is also needed by Wi-Fi signals. We use a reliability parameter
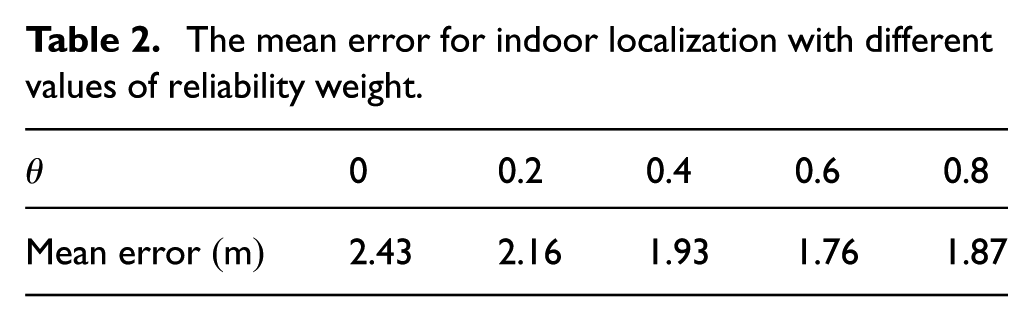
Table 2 gives a brief contrast of the performances with different
The mean error for indoor localization with different values of reliability weight.
Conclusion
In many studies, they assume that the more reference points there are, the more accurately the system will achieve, which is proved to be untrue in this article. We give a reference points placement theory that gives a theoretical guide to place reference points.
Focusing on the excessive calculation of cluster algorithms for coarse localization and reference points clustering, the Wi-Fi propagation-based cluster algorithm is proposed. By means of a sorting to replace the complex operations, it reduces the computation and ensures the clustering effect.
The accuracy of Wi-Fi indoor localization results can be improved by importing additional information. In this article, the map information and inertial sensors (magnetometer, accelerometer) information is introduced to reduce the error. The map information does not bring about new error message, but the inertial sensors will cause new error messages. Therefore, the Wi-Fi RSS measurement and sensor data need to be processed. We find that when the reliability parameter of inertial sensor reaches 0.6, it arrives a best accuracy. Tracking service can achieve a 2 m error-bound with 83% probability, and the mean error is 1.45 m.
Footnotes
Handling Editor: Haosheng Huang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (NSFC) (grant no. 61772228), National Key Research and Development Program of China (grant no. 2016YFB0201503), Major Special Research Project of Science and Technology Department of Jilin Province (20160203008GX), and Graduate Innovation Fund of Jilin University (2017069).