
Abstract
The problem of maneuvering target tracking is a hot issue in the field of target tracking. Due to the range rate measurement containing the maneuvering information of target, it has the important practical significance to study how to use the range rate measurement to improve the effect of maneuvering target tracking. In the framework of interacting multiple model algorithm, the range rate measurement is used to update target state estimate and the probability of motion model to improve the tracking performance. As the measurement equation including the range rate measurement is strongly nonlinear, square root cubature Kalman filter algorithm is selected as the filter in interacting multiple model algorithm. The normal acceleration is deduced from the range rate with the reality constraint. And through Monte Carlo simulation, the empirical distribution functions of the normal acceleration statistics corresponding to different motion models are obtained. Their approximate distribution functions are obtained by the use of the expectation maximization algorithm with Gaussian mixture model. Then the probability distribution and probability distribution of measurement prediction residual are combined into a new likelihood function to improve the efficiency of updating the model probability. The experimental results show that the interacting multiple model algorithm proposed in this article has the smaller root mean square error of position and velocity and has the smaller average Kullback-Leibler divergence of model probability during the motion model stable phase.
Keywords
Introduction
The interacting multiple model (IMM) algorithm is considered as the most effective hybrid estimation scheme in the maneuvering target tracking problem. 1 It is widely used in the actual engineering problems that the radar tracks the maneuvering aircraft.2,3 Under a reasonable set of movement models and the initial probability, the performance of IMM algorithm with the radar measurements can be improved by use of a good nonlinear filter and an updating method of the model probability. The Doppler radar not only can obtain the position information of the target, but also the range rate or Doppler velocity. The literature4–6 shows that the range rate measurement can improve the tracking performance. Yuan et al. 7 and Frencl and colleagues8,9 try to get the angle velocity estimation from the Doppler velocity. Bizup and Brown 10 show that the use of range rate measurement can improve the ability of maneuvering detection. The geometric relationship and curve motion principle are adopted to obtain the normal acceleration statistic from the range rate and then achieve the goal of rapid maneuvering detection in Bizup and Brown. 10 Ru et al. 11 combine the statistic with the tangential acceleration to obtain the statistic of the total acceleration. Lu et al. 12 use the Mahalanobis distance and Euclidean distance optimization method to give two statistics of the total acceleration. Then the normal acceleration information of maneuvering targets can be acquired through the range rate measurement and then the target motion model information can also be learned. However, the literatures10–12 only use range rate for the multi-model algorithm based on the hard decision, whose motion models are switched by the maneuvering detector. Because the range rate contains the motion model of information, it can be used for the soft decision of IMM algorithm to improve the efficiency of updating the model probability. The purpose of this article is to improve the performance of IMM algorithm by the use of the range rate measurement. However, as the measurement equation including the range rate measurement is strongly nonlinear, it has not been widely used in target tracking problem. With the development of nonlinear filtering theory, the performance of approximate filtering algorithm compared to the traditional extended Kalman Filter (EKF) algorithm 13 is greatly improved. Recently, Arasaratnam and Haykin 14 propose square root cubature Kalman filter (SCKF) algorithm that has the comparable nonlinear approximation ability, the numerical accuracy and stability with conversion measurement Kalman Filter (CMKF) 15 and unscented Kalman Filter (UKF). 16 Then SCKF is adopted as the nonlinear filter of IMM algorithm in this article.
In the soft decision of IMM algorithm, the introduction of the maneuvering information extracted from the range rate measurement can improve the efficiency of updating the motion model probability. Given the initial and transition model probabilities, the calculation of model probability is decided on the corresponding likelihood function. The traditional likelihood function is expressed as the Gauss distribution of measurement prediction residuals that contains the position information. But the position measurement cannot directly reflect the maneuver information of the target. The statistic of acceleration from the range rate can be used to modify the likelihood function. In this article, the normal acceleration is deduced from the range rate with the reality constraint. And through Monte Carlo simulation, the empirical distribution functions of normal acceleration statistics corresponding to different motion models are obtained. The approximate distribution function is obtained by the use of the expectation maximization (EM) algorithm 17 with Gaussian mixture model (GMM). 18 Then both GMMs and probability distribution of measurement prediction residual are combined into a new likelihood function to improve the efficiency of updating the model probability.
State space equation and measurement equation
The application background of this article is to use the Doppler radar to track the manned aircraft. In order to simplify the description, we discuss the problem in two-dimensional (2D) plane. The set of motion models in the IMM algorithm contains


where

where

where
SCKF algorithm
Because of the strongly nonlinear relationship between the range rate and the target state, EKF algorithm cannot make full use of the range rate measurement to improve the estimate accuracy. Arasaratnam and Haykin 14 proposes SCKF that use a group of equal weight cubature points and is based on the spherical radial integral criterion to solve Bayesian filtering. SCKF algorithm is to first calculate the cubature points and the corresponding weights. The cubature points under the third-order cubature criterion and the corresponding weights are

where

The specific steps of SCKF are as follows.
Time updating
Decomposing the covariance

Computing the state cubature points and spreading them through the state space equation


Computing the one-step prediction state and the square root of its covariance


where

Measurement updating
Computing the cubature points and spreading them through the measurement equation


Calculating the prediction measurements

Calculating the innovation covariance square root and covariance


where

Calculating the filtering gain matrix

Calculating the optimal state estimate and covariance square root at time


The statistic of normal acceleration
The normal acceleration
The target moves in 2D plane of coordinate system

where

Assume the velocity direction

In the radar scanning period

The normal acceleration can be calculated by

The measurements of

We can obtain the estimation values

where
Empirical distribution and GMM
The


where

where

The expression for the expectation

where

The expression for maximum


Use the Lagrange multiplier method to estimate parameter
IMM-SCKF-USP
The range rate measurement is applied into IMM algorithm on the double sides. First, it is used to update the state estimate; second, it is taken as the likelihood parameter to update the model probability. We mark this IMM algorithm as IMM-SCKF-updating the state estimation and the model probability (USP):
Reinitializing the model conditionally
For the

where

where
Updating the state estimates
Given the initial condition
Updating the model probability
Calculate the estimate value


where

where
Estimation fusion
The overall estimate and overall estimation error covariance matrix at time


The main difference between IMM-SCKF-USP algorithm and standard IMM algorithm is the likelihood function designed at step (3). The standard IMM algorithm only takes the likelihood function of the measurement prediction residual
Simulation experiment
Simulation settings
The initial state of target

The real trajectory of target.
The standard deviations of radar measurement noise are set as
Corresponding to the true motion of target, the motion model set of IMM algorithm includes one constant velocity (CV) motion model

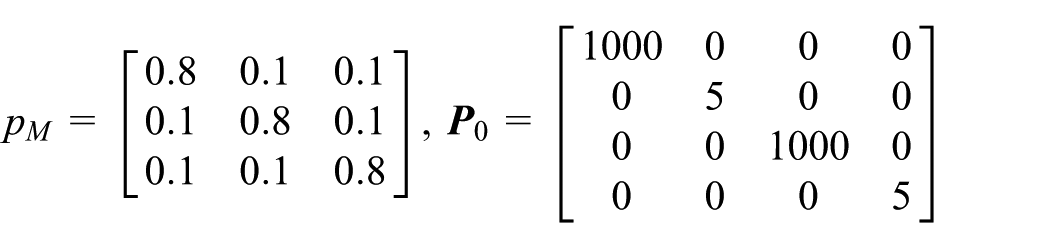
The corresponding noise covariance matrixes


The initial model probability is set as
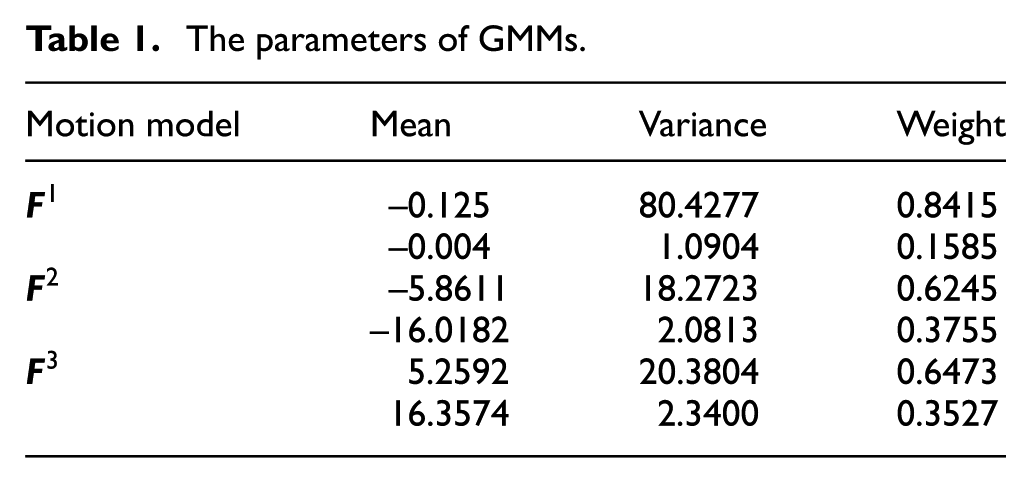
The results of empirical distributions and GMMs
The 100 time Monte Carlo simulations are carried out for each motion model
In order to illustrate the specific steps of the simulation experiment, we take an example of obtaining the empirical distribution
According to the parameters set in section “Simulation settings,” let the target moves 100 times with the motion model
Use SCKF algorithm with the motion model
Use each radar measurement sequence in 10–30 s and corresponding state estimation sequences to calculate
After having the empirical distribution functions

The empirical distribution functions and GMMs: (a)
The parameters of GMMs.
Tracking performance comparison
We compare IMM-SCKF-USP algorithm proposed in this article with the popular IMM-SCKF, IMM-UKF, IMM-EKF, and IMM-CMKF that all use the range rate measurement to update the state estimate.
The Sigma points and corresponding weights of UKF algorithm can be calculated by


where
The Jacobian matrix of nonlinear measurement function of EKF algorithm 13 is

CMKF algorithm proposed by Bordonaro et al. 15 is used. The root mean square error (RMSE) of state estimate is used to measure the performance of the tracking algorithm. The RMSE of position and RMSE of velocity are respectively

where
For the each IMM algorithm, we carry out 100 Monte Carlo simulations and the RMSE of position and RMSE of velocity are calculated and shown in Figure 3. Figure 4 shows the motion model probability distributions and tracking results of each IMM algorithm at 50th Monte Carlo simulation.
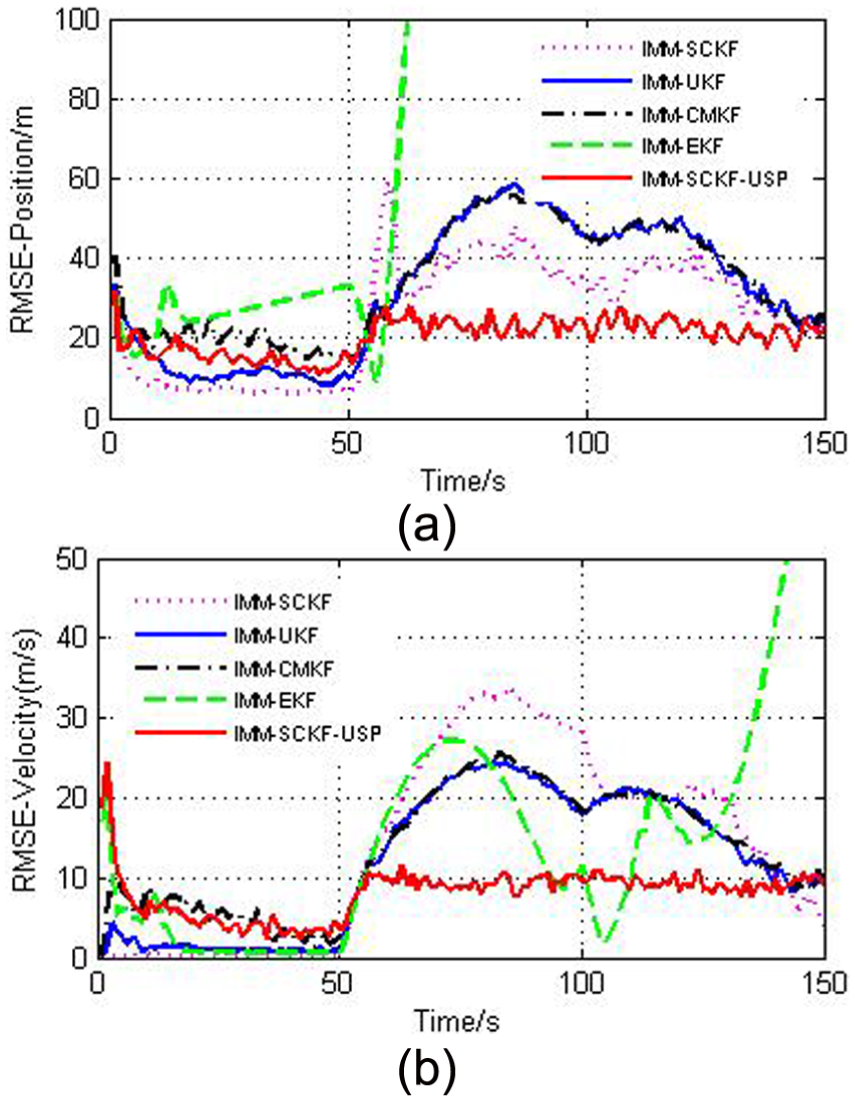
(a) RMSE of position and (b) RMSE of velocity for each IMM algorithm.

Tracking results of each IMM algorithm at 50th Monte Carlo simulation: (a) model probability of IMM-SCKF-USP, (b) tracking result, (c) model probability of IMM-SCKF, (d) tracking result, (e) model probability of IMM-UKF, (f) tracking result, (g) model probability of IMM-CMKF, (h) tracking result, (i) model probability of IMM-EKF, and (j) tracking result.
From Figures 3 and 4, except IMM-EKF algorithm, the other four IMM algorithms can accurately track the target. It also suggests that SCKF, UKF, and CMKF filters can solve the target tracking problem with the strongly nonlinear measurement function. EKF algorithm approximates linearly formula (3) by the first-order Taylor formula and however cannot obtain the good approximation effect.
IMM-SCKF-USP algorithm at the target maneuver phase, namely during 51–150 s, has the better tracking precision than other four IMM algorithms. And at the non-maneuver phase, it has the comparable tracking precision with others. The main reason is that IMM-SCKF-USP algorithm adopts the likelihood function of normal acceleration statistics to modify the process of updating the model probability that leads to a suited probability distribution of the motion model. The model probability distribution of IMM-SCKF-USP algorithm shown in Figure 4(a) is more close to the real target motion compared with other four IMM algorithms as shown in Figure 4(c), (e), and (g). And at the model switching phase that is close to 51 or 101 s, IMM-SCKF-USP algorithm is more sensitive. The model probability distribution with EKF algorithm has the obvious anomaly as shown in Figure 4(i). In order to reasonably illustrate the function of modification for updating the model probability, we adopt the average Kullback-Leibler (KL) divergence 21 to measure the difference between the model probability distribution of IMM algorithm and the true target motion model probability distribution.
The true motion model probability distribution is

where

If

Figure 5 shows the average KL divergence of the five IMM algorithms with 100 Monte Carlo simulations at every moment. It can be seen that the model probability distribution of IMM-SCKF-USP algorithm during the motion model stable phase has a lower KL divergence.

Average KL divergence: (a) average KL divergence in 0–150 s, (b) average KL divergence in 0–50 s, (c) average KL divergence in 51–100 s, and (d) average KL divergence in 101–150 s.
Conclusion
The purpose of this article is to develop the range rate measurement potential in the IMM algorithm for the maneuvering target tracking problem. On the state estimate side, the range rate measurement is introduced into the measurement equation to improve the precision of target state estimation. In order to solve the problem that the measurement equation is strongly nonlinear, this article uses the popular SCKF algorithm as the filter in IMM algorithm. In the simulation experiment, it is verified that the IMM-SCKF has the similar nonlinear approximation performance with IMM-UKF algorithm, as shown in Figures 3 and 4(c)–(f). The focus of this article is that the maneuvering information extracted from the range rate measurement is applied into updating the motion model probability. We renew to establish the relationship between the normal accelerate and range rate. Through the Monte Claro simulation and EM algorithm, the approximate GMM of the probability distribution of the normal accelerate statistic can be obtained. And the approximate GMM is combined with the probability distribution of measurement prediction residual error to calculate the likelihood function of motion model. Then, a novel IMM-SCKF-USP algorithm is proposed in section “IMM-SCKF-USP.” Simulation experimental results show that IMM-SCKF-USP algorithm compared with other IMM algorithms has the better performance of tracking maneuvering target.
Footnotes
Handling Editor: Thomas Wettergren
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.