
Abstract
A distributed consensus strong tracking filter is developed and investigated for the target tracking problems with model mismatches in wireless sensor networks. This novel approach is based on basic strong tracking filter which is one of the most efficient and robust state estimation algorithms for model mismatches. However, strong tracking filter encounters two fundamental problems in wireless sensor networks: communication congestion and scalability. This work is to apply a distributed way of strong tracking filter using the consensus filter to adjust the time-variant fading factor in a distributed manner, which makes the residual error sequences of all sensors keep orthogonality with the state estimation errors. Theoretical analysis shows that the calculation flow diagram of distributed consensus strong tracking filter is as complex as that of distributed Kalman filtering. Although the message of distributed consensus strong tracking filter is approximately twice the size of the message of distributed Kalman filtering, distributed consensus strong tracking filter has better accuracy in target tracking with model mismatches. Finally, simulation results are provided to show that the state estimation of distributed consensus strong tracking filter has better accuracy and robustness against target mutation than the traditional distributed Kalman filtering when the tracker is described by current statistic model.
Keywords
Introduction
During the past decade, wireless sensor networks (WSNs) have been a main topic of interest due to their wide and successful applications including environmental monitoring and surveillance, public safety, medicine, the military area, and so on. Because single sensor may lead to poor stability, slow convergence, and low monitoring accuracy in measuring certain parameters of interest, distributed state estimation using WSNs plays a key role in estimating and tracking the states of targets or dynamic processes that evolve in the sensing field.
An area that has recently received considerable attention is the utilization of a set of local Kalman filters (KFs) in each node that communicates with neighbors by adding dynamic consensus algorithms in distributed state estimation. More precisely, the scalable and distributed Kalman filtering (DKF) algorithm relying on dynamic average consensus was first introduced in Olfati-Saber.1,2 A Kalman consensus filter with superior performance was developed in Olfati-Saber 3 by adding a consensus term constructed by two items: one is a difference of state estimation between a node and its neighbors, the other is a consensus gain on the local state estimation of a standard KF for each node. Cattivell and Sayed 4 introduced diffusion strategies for DKF and smoothing, analyzed the convergence, and provided the steady-state mean value and mean square analysis. A filtering algorithm based on state prediction consensus was proposed by Wang et al., 5 which updates the local predicted value using the previous estimates of neighbors to improve the estimation accuracy. Das and Moura 6 developed a DKF called the Consensus + Innovations Kalman filter and used the distributed estimates of the pseudo state instead of using the pseudo observations to estimate the target. Yang et al. 7 considered distributed state estimation over a resource-limited WSNs with stochastic sensor activation to reduce the sensor energy consumption in communications, where each sensor is activated with a certain probability. Kinnaert and Hao 8 investigated the sensor faults affecting the state estimation of distributed state observers. In distributed agent-based dynamic state, estimation over a Lossy network was provided by Alam et al. 9 Li et al. 10 paid great attention to the fusion with unknown correlations, which ubiquitously exist in most of distributed filtering problems.
Obviously, KF is the essential basis for the above-mentioned DKF. DKF inherited some shortcomings of KF. One shortcoming is that when the system model is mismatching, the filter accuracy will decrease and even diverge. This means that DKF has the weak robustness against model mismatches. Another shortcoming is that although the filter is stable, DKF might lose the ability of tracking catastrophe state. The reason is as follows. When the system reaches a steady state, the gain matrix of DKF approximates to the minimum value. However, if the catastrophe state happens, the residual errors will increase accordingly, whereas the gain matrix of DKF will remain the minimum value due to offline computation. This makes DKF not track the target in time. To overcome these drawbacks, Zhou proposed an effective method called strong tracking filter (STF).11,12 The main idea of STF is that when the state estimation of KF deviates from the actual state, the effect of the old observation on the current filter estimation is reduced using the time-variant fading factor and the effect of the new observation is increased, resulting in adjusting the gain matrix in time. Thus, the residual error sequences of all sensors keep orthogonality with the state estimation errors, which means that STF has the performance similar to Gaussian White Noise to maintain the effective tracking of the actual system. Therefore, STF has a strong robustness to the system model parameter mismatches, the lower sensitivity to the statistical characteristics of the system noise and the initial state, the strong tracking ability for the abrupt state, and the ability of maintaining the strong tracking in the steady state.13,14 As we all know, the reason of expanding KF to DKF is that consensus filter has two major advantages. First, DKF does not need a fusion center, which makes the whole system be robust; in other words, the filter can be still completed even when a single node fails or leaves the sensor networks. Second, DKF is scalable, which means that each node only needs information of its neighboring nodes for target tracking. Noticing that the targets to be tracked such as animals have mismatch models and catastrophe states in target tracking of WSNs, whereas DKF cannot deal with this problem. Inspired by consensus filter, a natural idea is to introduce consensus filter to STF to solve this problem. Although STF has been expanded to distributed tracking fusion algorithms in some literature,15–18 there are few studies on distributed consensus strong tracking filtering (DCSTF) algorithms analogous to DKF algorithms using consensus filter to maintain the scalability of the system.
Based on the above observations, we use consensus filter to adjust the time-variant fading factor of STF. When doing this, the problem to be solved is how to transfer the time-variant fading factor to the form of average value like DKF for using the consensus filter to get the value of the time-variant fading factor and to further analyze computation amount of DCSTF. First, DKF with high-gain versions of the high-pass consensus filter is reviewed. Second, we shift our attention to the DCSTF algorithm for sensor networks with model mismatches, the key role of which is to use a distributed way to adjust the time-variant fading factor to make the residual error sequences keep orthogonality with the state estimation errors until the variance of the state estimation errors reaches the minimum value. Third, because of model mismatches, the tracker uses the constant-velocity model 19 and the current statistic model20,21 to track the target that actually moves with segment constant-acceleration model actually. 22 Finally, the simulation results are provided to show that although the tracker model mismatches the target model, the DCSTF algorithm has better state estimation accuracy and robustness in target tracking than DKF in current statistic model.
The outline of the article is as follows. The system model is described in section “System description.” The DKF algorithm with consensus filters is reviewed in section “Preliminaries: DKF with high-pass consensus filter.” Our main results including the DCSTF algorithms with consensus on state estimates are presented in section “DCSTF with high-pass consensus filter.” Simulation results are given in section “Simulation.” Finally, concluding remarks are made in section “Conclusion.”
System description
Consider a dynamic target with a linear time-varying model

where
We are interested in tracking the state of this target using WSNs consisting of
The measurement equation of the ith node with the same sampling rate is given by

where
Then, the collective measurement equation of WSNs is given by

where
Given the collective information sequences

with

with
Preliminaries: DKF with high-pass consensus filter
Now, we review the DKF algorithm with high-pass consensus filter in Li et al. 10 The collective KF of the ith node is the same and can be written as




Define the average inverse covariance

Then, equation (9) can be written as

It follows from equation (8) that

Then, equation (7) can be written as

In the following, we can use
Thus, if one can (approximately) compute the averages

where
The process of DKF is omitted due to the paper length limitation, which can be seen in Olfati-Saber. 2
DCSTF with high-pass consensus filter
In this section, some consensus filters are used to calculate the average inverse covariance
According to Zhou et al.,
11
equation (7) can be improved with the time-variant fading factor

which makes the residual error sequences of all nodes keep orthogonality with the state estimation errors. According to KF, equation (9) can be also written as

where

It follows from equation (16) and the prior state estimation error

Using the collective measurement equation (3),

which further leads to

Let

From KF, we know that

which together with equation (18) yields that equation (17) can be written as

Then, it is easy to get a sufficient condition for equation (19)

Using equation (15), the above equation can be written as

which further results in

Positive

Obviously, it is hard to solve equation (21), but with the help of the trace of matrix the suboptimal solution of equation (21) can be obtained

Obviously, equation (22) is not distributed, since any node i needs the information of all nodes. To solve this problem, the commutative property of the trace of matrix is used

So

To use the consensus filter like DKF algorithm, some average information like

Because
where
According to Ge et al.
14

where
Then,

When

When

we get
Similar to DKF,
Distributed consensus strong tracking filter.

where MSE is the mean square error, and
According to Table 1, the ith node sends the message
Simulation
In this section, because of model mismatches, we use the tracker model different from the target model. Without loss of generality, we assume that the target moves with the segment constant-acceleration model actually, but the tracker uses the constant-velocity model and the current statistic model, which will be discussed in subsections “The tracker with constant-velocity model” and “The tracker with the current statistic model,” respectively.
We numerically evaluate MSE performance of DCSTF and compare it with that of DKF. Suppose that the target moves in three-dimensional (3D) plane with segment constant-acceleration model for iteration
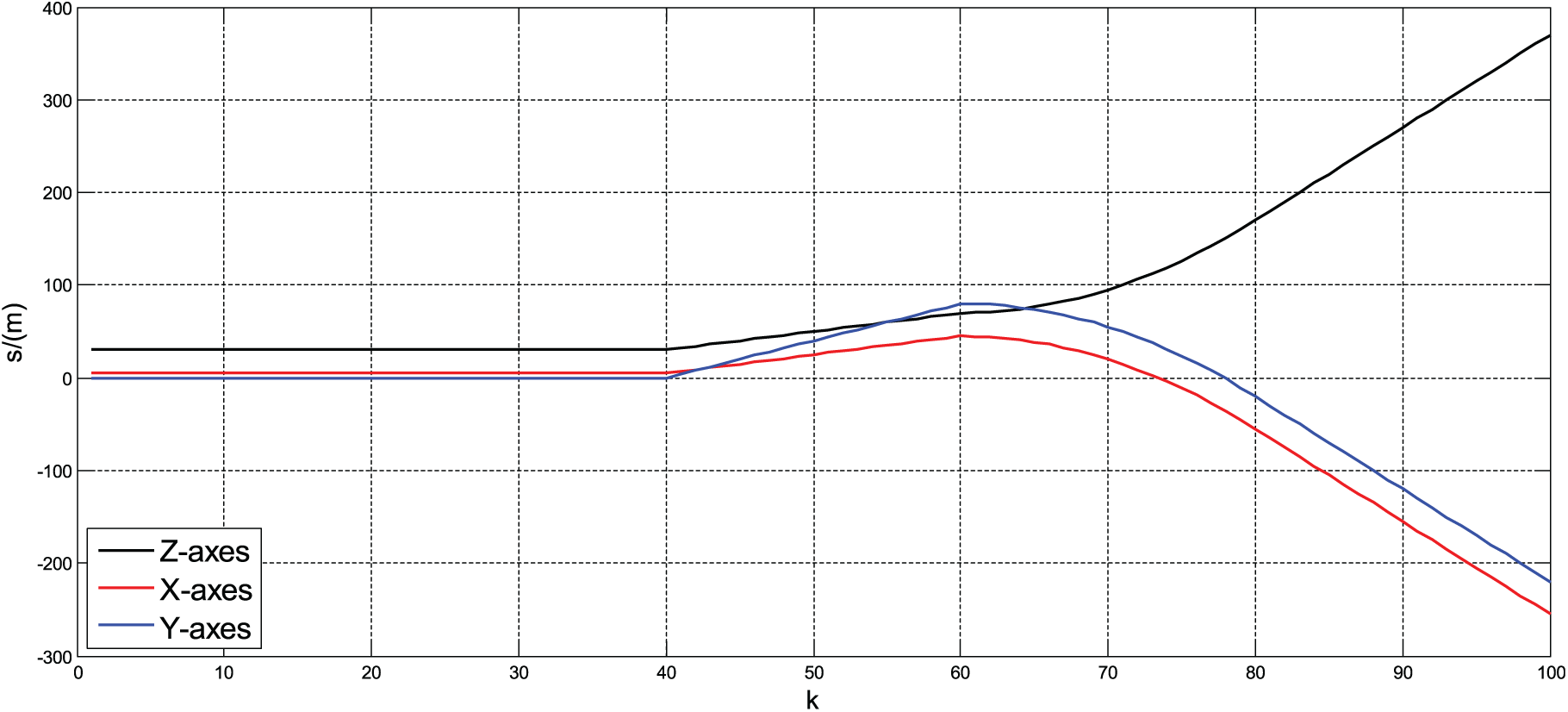
Target.
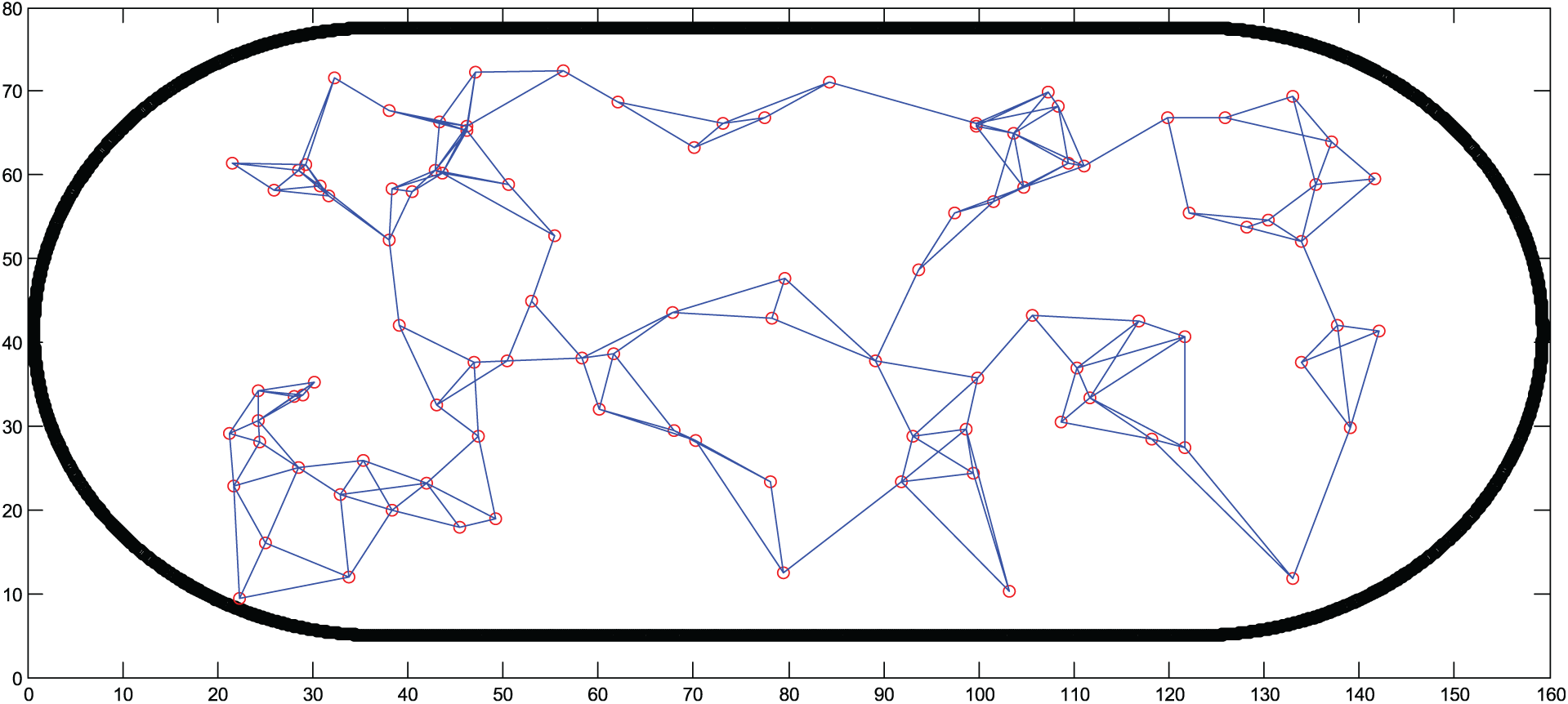
WSNs with 100 nodes and 422 links.
For distributed consensus filter, according to Olfati-Saber, 2 without loss of generality, we set β = 7 and a small step size ξ = 0.0125 in equation (14). The weakened factor α = 1 is used in equation (25) for DCSTF.
The tracker with constant-velocity model
Without loss of generality, we only analyze the dynamics of the tracker with constant-velocity model on x-axle. The discrete state equations on y-axle and z-axle are similar to those on x-axle, equations (1) and (2) can be written as

where
Figure 3 shows the comparison of MSE using the local KF and DKF of the ith node. Obviously, MSE from any node with DKF (in green lines) is much smaller than that from local KF (in blue lines) in all three dimensions, so DKF performs significantly better than the local KF.

MSE using the local KF and DKF with constant-velocity model.
Figure 4 shows the comparison of MSE using DKF and DCSTF of the ith node. MSE of DCSTF is similar to that of DKF. It is easy to see that DKF plays as good as DCSTF in all three dimensions, since the constant-velocity tracker model quite mismatches the target dynamics. This result demonstrates that the DCSTF is useless under the constant-velocity tracker model.

MSE using DKF and DCSTF with constant-velocity model.
The tracker with the current statistic model
Now, we use the current statistic model, which is a non-zero-mean time-correlation model of the acceleration, and the maneuvering acceleration follows the modified Rayleigh distribution with the mean that is the predicted value of the current acceleration. Similar to the constant-velocity model, equations (1) and (2) on x-axle can be written as follows

where

Due to the limitation of the length of article, the comparison of MSE using the local KF and DKF with the current statistic model is omitted. Figure 5 shows the comparison of MSE using DKF and DCSTF with current statistic model. It can be seen from Figure 5 that the MSE by DCSTF is smaller than that of DKF in all dimensions, particularly in the target mutation such as

MSE using DKF and DCSTF with current statistic model.
Conclusion
In this article, the DCSTF algorithm with model mismatches has been proposed. To solve communication congestion and scalability problems of WSNs, we have provided a distributed method to obtain the time-variant fading factor of STF using consensus filter to make the residual error sequences keep orthogonality with the state estimation errors. Moreover, the message size of DCSTF has been discussed and compared with that of the traditional DKF. The result shows that DCSTF has better accuracy and robustness against target mutation than traditional DKF when the tracker is described by current statistic model although the message of DCSTF is approximately twice the size of the message of DKF.
Footnotes
Handling Editor: Luca Reggiani
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported partly by Top-notch Academic Programs Project of Jiangsu Higher Education Institutions, partly by Joint Innovation Project Foundation of Jiangsu Province under Grant BY2014024, and partly by Joint research project of Wuxi Institute of Technology under Grant 4014009931.