
Abstract
This article studies localization for mobile sensor network with incomplete range measurements, that is, the ranges between some pairs of sensors cannot be measured. Different from existing works that localize sensors one by one, the localization problem in this article is solved for the whole mobile sensor network. According to whether the ranges can be measured or not, all the sensors in the network are grouped to construct basic localization units. For the sensors in basic localization units, a constrained nonlinear model is first established to formulate their relative motion, where the motion states are chosen as ranges and cosine values of angles between ranges. Then, based on the established model, a constrained unscented Kalman filter is adopted to provide motion state estimation. In the constrained unscented Kalman filter, the clipping technique is introduced to handle the model constraints, and the uncorrelated conversion technique is introduced to make full use of measurements. Hence, the estimation accuracy can be improved. Finally, the distributed multidimensional scaling-map method is used to localize the whole sensor network using the estimated ranges, and a localization algorithm is presented. The effectiveness and advantages of the proposed algorithm are demonstrated through several simulation examples.
Keywords
Introduction
Wireless sensor network (WSN) is a research hotspot in recent years and has been widely used in battlefield environment awareness, environment monitoring, robots cooperative control, unmanned combat and other fields. 1 As a prerequisite and basis procedure in the WSN applications, the localization of WSN has attracted more and more researchers whose attention is concentrated on improving localization accuracy and effectiveness.
According to the manoeuvrability of sensors, localization of WSN can be classified into two categories, that is, static sensor network localization and mobile sensor network localization. In the former category, the stationary sensors are considered, and lots of effective algorithms have been put forward, see, for example, time of arrival (TOA) localization algorithm, 2 time difference of arrival (TDOA) localization algorithm, 3 angle of arrival (AOA) localization algorithm 4 and received signal strength indicator (RSSI) localization algorithm.5–7 To improve the localization accuracy, some researches attend to introduce filters to design localization algorithms. The nonlinear filters (extended Kalman filter (EKF) and unscented Kalman filter (UKF)) and the multidimensional scaling-map (MDS-MAP) method are combined to design localization algorithms (see MDS-EKF and MDS-UKF algorithms), 8 and the accuracy comparison of different algorithms is provided. However, neither the MDS-UKF nor MDS-EKF algorithms can effectively deal with the sensors with manoeuvrability and cannot be applied for mobile sensor network localization.
For the mobile sensor network, the manoeuvrability of sensors leads to time-varying structure of WSN, hence brings more challenges to the localization with high accuracy. In the localization of mobile sensor network, the Global Positioning System (GPS)/inertial navigation system (INS) information are generally used, and many algorithms have been proposed, see for example, localization algorithm based on joint distribution state-information filter 9 and localization algorithm via an inertial navigation system–assisted single roadside unit. 10 However, the GPS/INS devices are not only expensive but also unreliable in some practical conditions.
Without using the GPS/INS information, the mobility of sensors is considered and the localization algorithm can be designed by introducing particle filter; see the Monte Carlo localization (MCL) algorithm 11 and other improved MCL-based algorithms.11–18 In these MCL-based algorithms, the manoeuvrability of the mobile sensors to be localized is handled by generating particles with random directions and velocities, and the detection radii of the anchor sensors (i.e. sensors with known positions) are used to filter out the impossible particles. Then, the approximate positions of mobile sensors can be calculated by fusing the positions of possible particles. However, because some detailed measurements (e.g. ranges, angles) are not used by MCL-based algorithms, the accurate positions of mobile sensors cannot be obtained.
Using the ranges and angles between the sensors to be localized and the anchor sensors, some other filters can be adopted in the localization algorithm design, see, for example, the square root-UKF (SR-UKF) 19 and the SR-cubature Kalman filter (SR-CKF). 20 However, in some general practical conditions, the angles between sensors cannot be measured, even the ranges between some pairs of sensors are unavailable (i.e. the range measurements are incomplete). For these conditions, the above localization algorithms are not suitable. Motivated by this situation, this article proposes to design a localization algorithm with incomplete range measurements. Considering that some sensors to be localized may not be detected by the anchor sensors, the localization of these sensors cannot be achieved independently. Hence, the clustering and merging methods, which are illustrated to be effective for static sensor network, 21 are introduced into mobile sensor network in this article. This contributes to achieving overall localization of mobile sensor network. By first grouping the whole sensor network into some basic localization units, the ranges between sensors can be compensated and refined with filtering. According to the compensated and refined ranges, the local sensor networks are obtained by clustering the whole sensor network, and then be localized and merged to achieve overall localization. Following the manners of the proposed algorithm, better performance of localization is obtained.
The rest of this article is organized as follows. The localization problem for mobile sensor network is first stated in section ‘Problem statement’. Section ‘Localization for mobile sensor network’ details the design procedure of localization algorithm, with establishing the motion model in section ‘Relative motion model of basic localization unit’, proposing the filter design in ‘UKF with clipping and uncorrelated conversion’, clustering and merging for the whole sensor network in section ‘Clustering and merging’, and the complete localization algorithm in section ‘Mobile sensor network localization algorithm with incomplete measurement’. Finally, section ‘Simulation’ provides a demonstration of the advantages of the designed algorithm through several simulation examples, and section ‘Conclusion’ summarizes this article with a conclusion.
Notation. For a WSN of N sensors, we denote
Problem statement
Consider a mobile sensor network with N sensors shown in Figure 1, where the sensors move in three-dimensional (3D) space with unknown motion. At time t, the actual ranges among these sensors can be measured as

where

Mobile sensor network of N sensors moving with unknown motion.
Based on the incomplete range measurements, the localization problem to be solved in this article is to calculate the absolute positions of all sensors
For each sensor
Localization for mobile sensor network
Using the incomplete measured ranges and the positions of anchor sensors
Relative motion model of basic localization unit
Based on graph rigidity, at least four common sensors between clusters are required for clustering and merging in 3D space. Thus, five sensors are selected to construct a basic localization unit
For each basic localization unit at time t, the relative motion model can be established in two different forms:
Model (1) relative range model, which describes the relative motion between the ranges among sensors.
Model (2) relative coordinate model, which describes the relative motion between the position coordinates of sensors.
Compared with model (1), the nonlinearity of model (2) is more significant, which introduces more complexity in the filtering process and leads to less precision of the localization results. Therefore, for each basic localization unit
As shown in Figure 2, a basic localization unit composed of five sensors (i.e. A, B, C, D and E) is denoted as
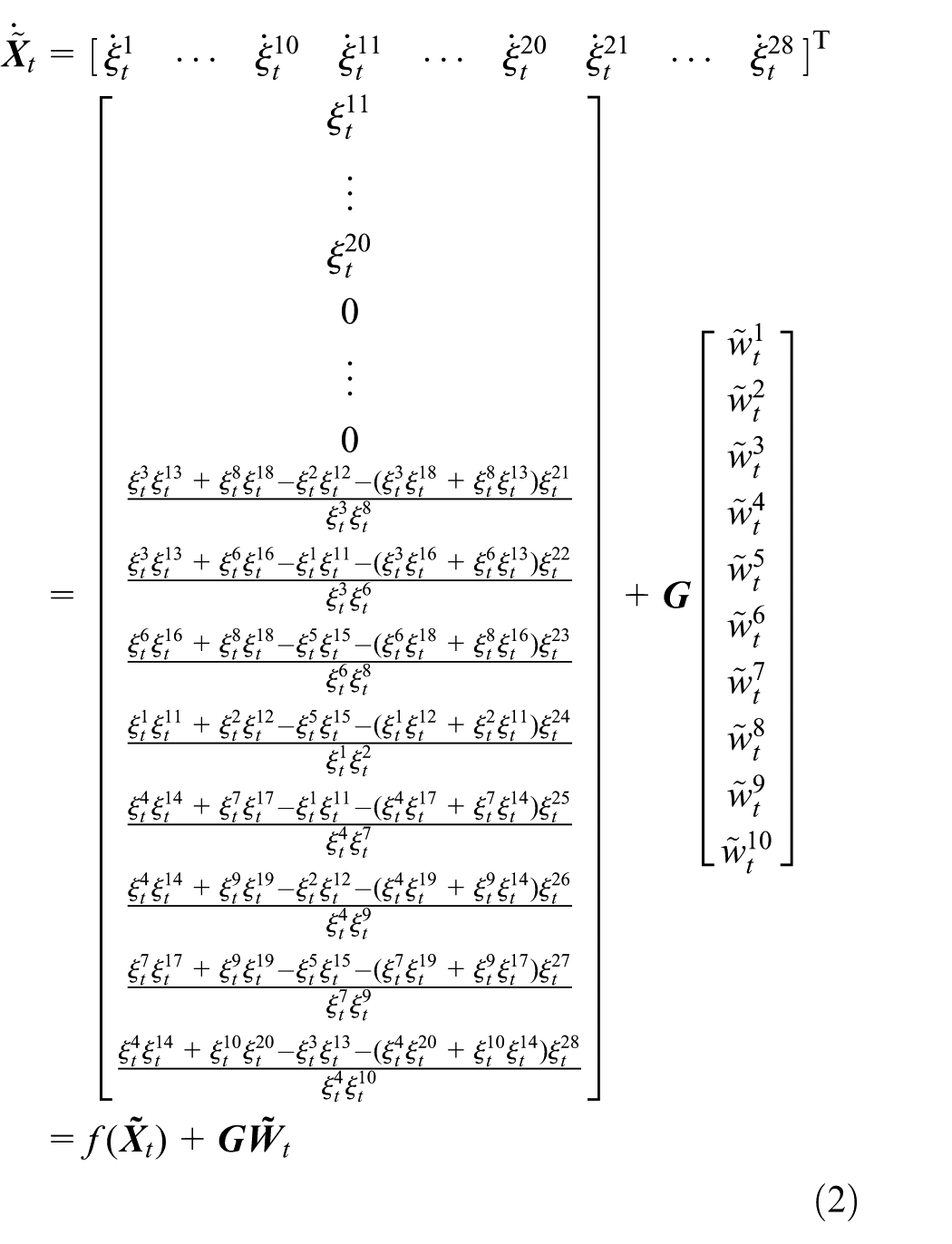
with the state vector

the disturbance (seemed as the unknown relative acceleration)

and the disturbance gain matrix


The relative location of sensors in basic localization unit.
The measurement model can be formulated as

with the measurement vector
Remark 1
According to rigidity of graph, all the 10 ranges among unit
Because the range between each pair of sensors is greater than

For the convenience of filtering, we prefer to discretize models (2) and (6) by sampling it at instant

with the discrete-time transition function

with
UKF with clipping and uncorrelated conversion
Due to the nonlinearity of model (2), a nonlinear filter should be used to provide estimation for ranges. However, for a nonlinear model, the original measurement cannot be fully used by filters based on linear minimum mean square error estimation, 22 for example, Kalman-based filters. In this article, the uncorrelated conversion (UC), which is proved to be an effective approach to extract additional measurement information, 22 is introduced to further improve the estimation performance. To additionally guarantee the physical constraints (7) for estimation, the constraint handling techniques (see the clipping technique 23 and quadratic programming (QP) technique 24 ) are required. Here, the clipping technique is used because the nonlinear converted measurement model (induced by UC) prevents the QP technique to be used. In this section, the UKF with appropriate computational complexity and acceptable accuracy is chosen, and the filter process with incorporating clipping and UC is detailed as follows:
1. One-step prediction with clipping
Based on unscented transformation (UT), the sigma points of

where
To guarantee the practical constraints (7) in filter, all the sigma points before and after propagation, respectively, are clipped according to the bounds of constraints, that is, for all


and


where
Remark 2
Note in physical constraint (7) that each element of state


with any positive definite weighting matrix
After clipping, the one-step prediction of state can be calculated as

with the weighting scalars

The corresponding covariance matrices can be calculated as

And the one-step prediction of measurement is

Accordingly, the corresponding covariance matrices can be calculated as


with

2. Measurement augmentation with UC
To deeply explore the information of the measurement, the original measurement is converted uncorrelatively by introducing an effective approach and then augmented by the converted measurement. Because the converted measurement is uncorrelated with the original one, the augmentation of the original measurement can provide more useful information and then improve the accuracy of range estimation. The augmented measurement can be generated as follows.
First, the reference distribution-based UC
22
is introduced to uncorrelatively convert the original measurement. Denote


Then, the UC of the original measurement can be defined as 22
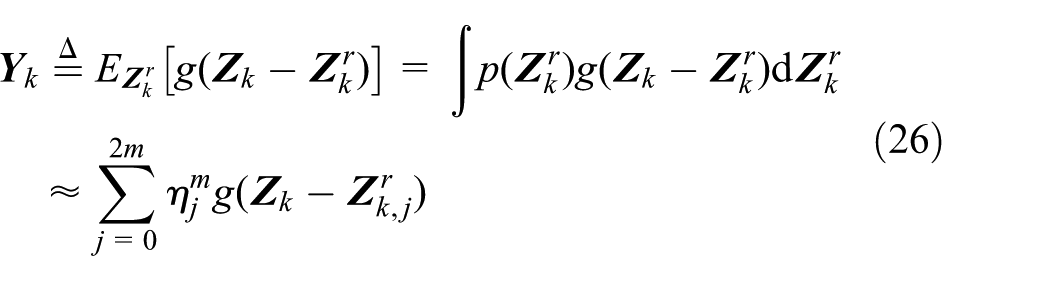
where

are the sigma points of

are the associated weighting scalars.
Remark 3
In equation (26), the converted measurement
According to the definition in equation (26), the mean of the UC
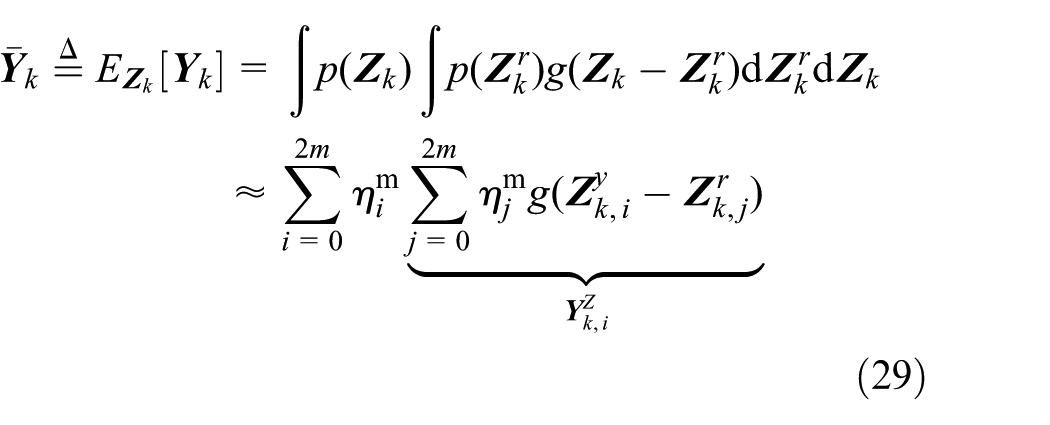
where

are the sigma points of
Now, the augmented measurement can be constructed as the combination of the original and uncorrelatively converted measurements, that is

The mean of the augmented measurement


with



where

3. Estimation update
With the augmented measurement

and the associated covariance matrix is calculated as

The whole process of UKF with clipping and UC is summarized as Algorithm 1.

Clustering and merging
According to estimated ranges in the basic localization unit
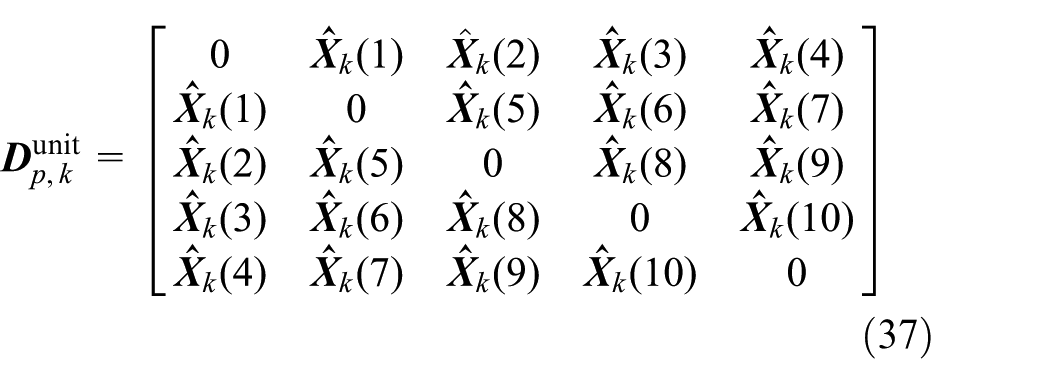
where

where
With the estimated ranges in
1. Clustering and local-localization
According to the distance matrix

According to the connection matrix

For each local sensor network

where


where
2. Merging of local sensor networks
According to the relative positions of the common sensors in different local sensor networks, the global map can be constructed using the rotation and translation method. Namely, merge other local sensor networks into the reference sensor network (i.e. the relative positions of the reference network
Assume that common nodes of the local reference network

with the rotation matrix

and the translation vector
3. Global absolute positions generated
Using the absolute position
Mobile sensor network localization algorithm with incomplete measurement
For a mobile sensor network

Simulation
To verify the proposed localization algorithm for mobile sensor network, several algorithms are compared in this section:
Sequential Monte Carlo localization (SMCL) algorithm. 13
MDS-MAP algorithm with EKF (MDS-EKF). 8
MDS-MAP algorithm with UKF (MDS-UKF). 8
The proposed localization algorithm with QP-UKF. 24
The proposed localization algorithm without UC.
In the comparison, the ranging error ratio is set separately at 1% and 10%, and we take the root mean square error (RMSE)

to describe the localization error, and stress

to describe the topology error of mobile sensor network. The smaller the RMSE and stress are calculated, the higher the localization accuracy is achieved.
Considering the sensor network composed of 10 mobile nodes in 3D space, and each node is free to move at an average speed of 3 m/s. Assuming that ranges among nodes in sensor network can be completely measured. The localization results of different localization algorithms under different range error ratios (denoted as e) are shown in Figures 3–12.
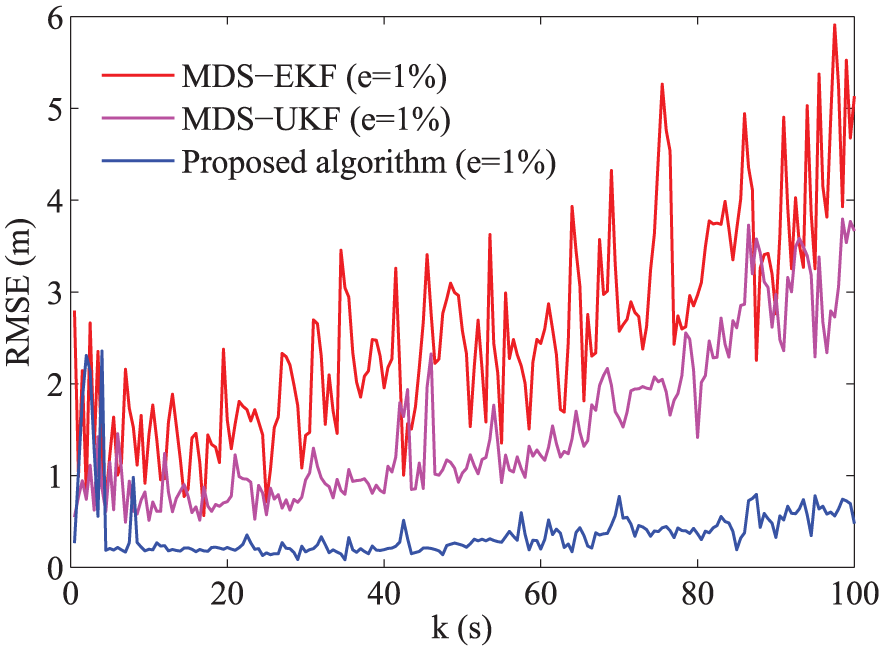
RMSE of localization algorithm with 1% range error.

Stress of localization algorithm with 1% range error.

RMSE of localization algorithm with 10% range error.

Stress of localization algorithm with 10% range error.
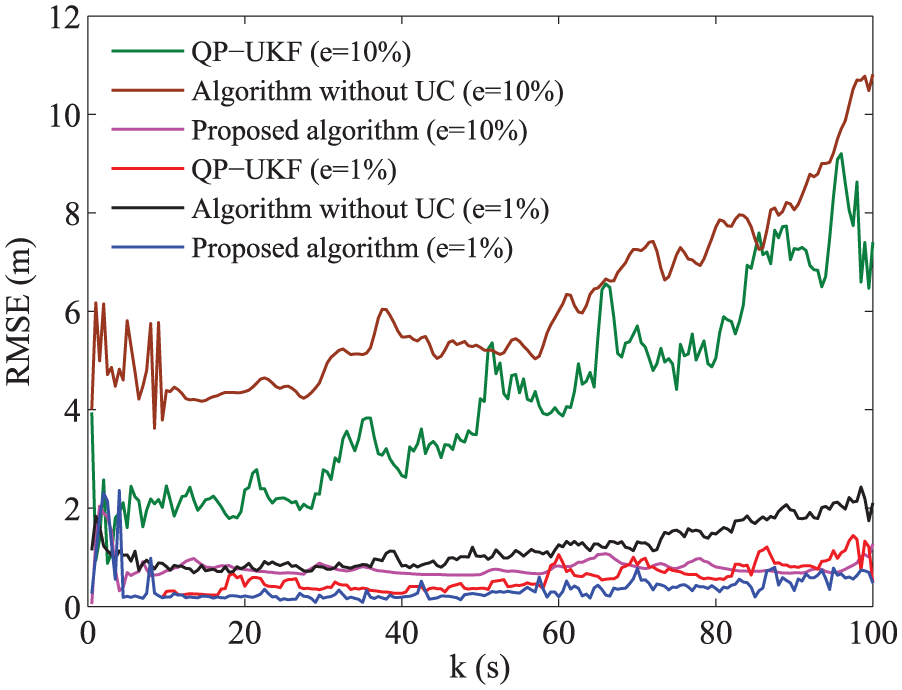
RMSE of the localization algorithm with different types of UKF.

Stress of the localization algorithm with different types of UKF.

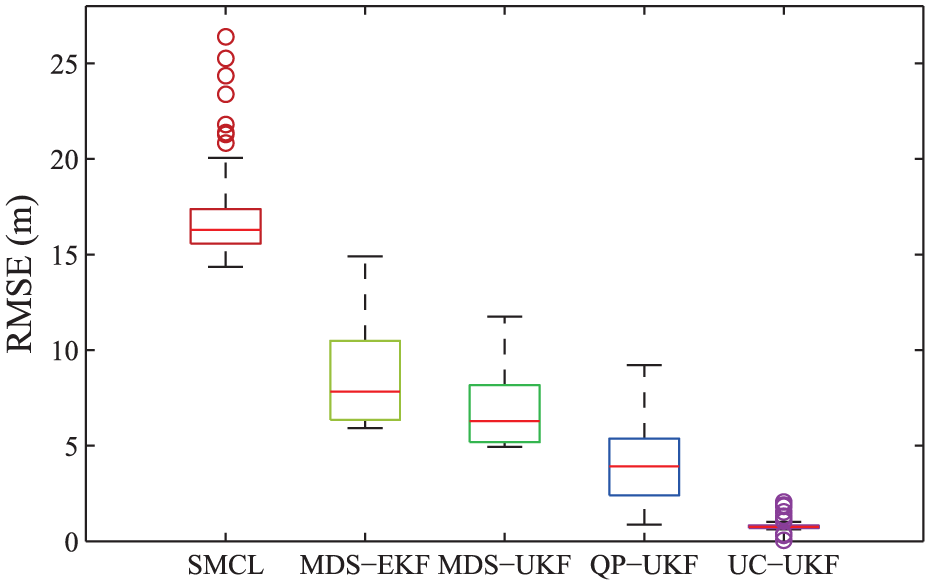
The boxplot for RMSE of different algorithms with e = 1%.

The boxplot for stress of different algorithms with e = 1%.
The boxplot for RMSE of different algorithms with e = 10%.

The boxplot for stress of different algorithms with e = 10%.
In the simulation, the ranges are gradually increasing due to free movement of nodes in sensor network. The pre-set relative range error ratio leads to the increase in localization error (i.e. RMSE), as shown in Figures 3, 5 and 7. In Figures 3–6, both the average RMSE (0.37 m under 1% range error and 0.78 m under 10% range error) and the average stress (0.004 under 1% range error and 0.031 under 10% range error) of the proposed algorithm are much smaller than those of MDS-EKF, MDS-UKF and SMCL algorithms. This verifies the higher localization accuracy of the proposed localization algorithm.
In the framework of the proposed localization algorithm, the UKF with different techniques (i.e. UKF with QP,
24
UKF with clipping and UKF with both clipping and UC) is compared to demonstrate the effectiveness of introducing clipping and UC. The performance comparison is displayed in Figures 7 and 8. Simulation results show that the average of RMSE is 0.61 and 1.35 m (4.17 and 5.98 m) for UKF with QP and clipping, respectively, under
In the form of boxplot, the average values, 25th and 75th percentiles, and the maximum and minimum of RMSE and stress in different algorithms are illustrated in Figures 9–12. In these boxplots, the central mark denotes the average value, the edges of the box denote the 25th and 75th percentiles, the upper and lower lines denote the maximum and minimum, and the separate points are the abnormal data. The shape of the box clearly shows the distribution of the data. It is easy to notice that the average of RMSE and stress of the proposed localization algorithm are smaller than those of other localization algorithms and so are the distributions. This demonstrates the accuracy and stability of the proposed algorithm.
The comparison for time cost of these algorithms is provided in Table 1. It is easily seen that the proposed algorithm possesses the highest localization accuracy with an acceptable increase in time cost. Compared with the algorithm without UC, the proposed algorithm is more accurate, with a slight increase in time cost, which verifies the effectiveness of introducing UC.
The comparison for average time cost of different algorithms.

RMSE: root mean square error; SMCL: Sequential Monte Carlo localization; MDS-EKF: multidimensional scaling extended Kalman filter; MDS-UKF: multidimensional scaling unscented Kalman filter; QP-UKF: quadratic programming; UC: uncorrelated conversion.
To verify the proposed node localization performance with incomplete measurement, we take the connectivity parameter

The average RMSE of proposed algorithm with different connectivities.

The average stress of proposed algorithm with different connectivities.
It can be easily seen from Figures 13 and 14 that the lowest connectivity of the proposed algorithm can reach
Conclusion
In this article, the localization problem of mobile sensor network with incomplete measurement is investigated, and a localization algorithm is proposed. The effectiveness of the proposed localization algorithm is achieved by the relative motion model with physical constraints, the UKF with clipping and UC, and the clustering and merging methods. Comparison with other existing algorithms demonstrates that the proposed algorithm can achieve highest localization accuracy. For mobile sensor network with different connectivities, the proposed localization algorithm is still valid, and its localization accuracy is gradually improved with the increase in connectivity.
Footnotes
Appendix 1
Handling Editor: Shuai Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Nature Science Foundation of China under grants 61403414, 61773396, 41601436, 61571458 and 71503260; the China Postdoctoral Science Foundation under grants 2016M603042 and 2017T100817; the Natural Science Basic Research Plan in Shaanxi Province of China under grants 2016JQ6070 and 2016JM6050; and Aero Science Fund under grant 20160196005.