
Abstract
Time-triggered systems play an important role in industrial embedded systems. The time-triggered network is deployed on the time-triggered network-on-chip implementation. It ensures the safety-critical industrial communication for real-time embedded multiprocessor systems. To guarantee the safety-critical requirements for communication, each message is transmitted by a predefined static schedule. However, synthesizing a feasible schedule is a challenge because both spatial and temporal constraints should be considered. This article presents a novel memetic-based schedule synthesis algorithm to derive a feasible schedule by determining the offset of messages on the time-triggered network-on-chip. Memetic-based schedule synthesis algorithm is based on memetic algorithm, which incorporates local search in the iterations of general genetic algorithm. We compare memetic-based schedule synthesis algorithm with genetic algorithm in different scale of time-triggered network-on-chip and number of messages. The experimental results show that the memetic-based schedule synthesis algorithm is effective to synthesize a feasible schedule, and the failure schedule synthesized by memetic-based schedule synthesis algorithm is only 34.2% in average compared to the conventional genetic algorithm.
Introduction
Time-triggered systems is one of the real-time systems for industrial multiprocessor systems. 1 At present, time-triggered systems are widely deployed in various fields, such as TTEthernet in avionic networks,2,3 Time-triggered protocol (TTP) in aerospace industry 4 and GENESYS in embedded systems. 5 TTNoC integrates the time-triggered concepts into the network-on-chip (NoC) for safety-critical real-time embedded systems. Unlike the requirements for general networks, such as quality of service (QoS) 6 as well as quality of experience (QoE) 7 in wireless networks, 8 user privacy in social networks, 9 or energy consumptions and prolonged network lifetime in wireless sensor networks,10–12 TTNoC provides the temporal predictability for safety-critical tasks, which ensures the tight and predictable communication latency.
There are two main architectures for a time-triggered embedded system, that is, bus-based and network-based architecture.
13
For the bus-based architecture, only one message is transmitted on the system at the same time. Therefore, each message owns its unique time slot for communication. For the network-based architecture, it allows a set of messages to be transmitted at the same time, provided that the physical links used by the messages are contention-free. Figure 1 shows the differences between bus-based and network-based time-triggered architectures. For the bus-based architecture, the message

Two main architectures for a time-triggered embedded system: (a) bus-based architecture and (b) network-based architecture.
TTNoC employs the network-based architecture. It consists of processing elements (PEs), switches, and physical links. PEs are interconnected by physical links and the switches on the TTNoC. A message for communication consists of header and data. Header includes the information for message communication on the TTNoC, for example, the addresses of source and destination. When the communication occurs on the TTNoC between two nodes, the switches forward the message based on a given route. To ensure the contention-free communication on the TTNoC, a schedule is required to determine the offset for each message. However, synthesizing such a schedule is rather complicated which is known as a nondeterministic polynomial (NP)-complete problem.13,14 In this article, we give a population-based hybrid genetic algorithm (GA) coupled with an individual learning, called memetic-based schedule synthesis algorithm (MSSA), to synthesize a feasible schedule for the communication on TTNoC.
The main contributions of this article are as follows. We formally give a system model consists of architecture, message, and routing for the schedule synthesis. The Memetic-based Schedule Synthesis Algorithm (MSSA) is proposed to synthesize the schedule. The simulation based on different architecture scale and number of messages proves that the MSSA reduces the failure rate so that synthesizing a feasible schedule effectively.
The rest of this article is organized as follows. We first review the related work consists various algorithm to synthesize schedule based on different architectures in section “Related work.” And the problem formulation consists of system model, and constraints are given in section “Problem formulation.” Then, the detail of MSSA is proposed in section “Memetic-based schedule synthesis algorithm.” The experimental results are shown in section “Evaluations.” Finally, we conclude this article in section “Conclusion and future work.”
Related work
There are many time-triggered applications in both bus-based and network-based architecture. Despite of different architectures, the communication on the time-triggered systems follows an predefined and statically configured schedule to ensure contention-free. 1 There are sufficient studies on schedule synthesis in time-triggered bus-based architecture.4,15,16 However, in bus-based architecture, synthesizing a feasible schedule only need to consider the temporal constraints rather than spatial constraints.
For the network-based architecture, most of the studies focus on synthesizing a feasible schedule based on satisfiability modulo theories (SMT). The scheduling of the general time-triggered multi-hop networks was first considered based on SMT solver. 14 However, it is unrealistic for a pure SMT approach to synthesize a schedule for a large-scale time-triggered network. To tackle the limitation of scalability based on SMT, a decomposition approach 17 and an incremental method 14 were presented. Craciunas and Oliver1,18 gave the solution combining task and network scheduling by SMT solver for distributed time-triggered systems. The schedule employs in time-triggered traffic in a general switched Ethernet network, which can also extend to specific Ethernet protocols such as Profinet and TTEthernet.
The schedule synthesis on network-based architecture in specific domains also appears in the various literature. Craciunas et al. 19 addressed the deterministic schedule synthesis for 802.1Qbv-compliant multi-hop switched networks. Zhang et al. 20 synthesized a schedule of a mixed-integer programming (MIP) model in Ethernet-based time-triggered systems. Ro et al. 21 synthesized the schedule on wireless networks by SMT solver. In time-triggered in-Vehicle networks, the holistic scheduling in system design and integration was studied. 22 The Unfixed Start Time (UST) algorithm, which schedules tasks and messages in a flexible way, was proposed.
Huang et al. 13 first studied the schedule synthesis specific to TTNoC. The problem was transformed into a special case of two-dimensional (2D) bin packing and formulated as an SMT instance. The schedule was synthesized by SMT solver with a First Fit Decreasing Height Decreasing Width (FFDHDW) algorithm to improve the algorithm performance of execution time. Scholer et al. 23 proposed an optimal scheduler based on a Boolean SAT solver for a TTNoC. Murshed et al. 24 gave a scheduling model based on mixed-integer linear programming (MILP), with both time-triggered and event-triggered messages and constraints on NoC. Freier et al. 25 proposed a heuristic algorithm for scheduling on the scalable communication NoC-like structure. The algorithm ensures that the NoC and the core are highly utilized with pseudo-polynomial time complexity.
Unlike the above studies based on SMT-like approach, we propose a meta-heuristic approach of memetic-based algorithm to synthesize a feasible schedule.
Problem formulation
In this section, we first introduce the basic notions and system model of TTNoC. And the constraints on TTNoC are given. Then, we formally state the schedule synthesis problem.
System model
Architecture model
The architecture of a TTNoC is modeled by a directed graph
Message model
We denote the set of
Routing model
Given two nodes
Schedule synthesis model
The schedule
Let


Let

where
We define the whole schedule set as
Contention-free constraints
The constraints for general time-triggered multi-hop network are presented in Steiner.
14
The constraints on the TTNoC are similar to those on general time-triggered network that a schedule
Offset constraints
For the schedule of a message
Constraint 1.
Link constraints
For each communication, a message occupies links in terms of a given route until the whole message is received by the sink node. The contention will happen if messages which share the overlapped route forward simultaneously. To show the link constraints, we first give the definition of overlap. Given two schedules of messages

where

The schedule
Constraint 2. Given any
Problem statement
The problem of schedule synthesis can be formulated based on the schedule synthesis description and constraints, which are given as follows:
The architecture of a TTNoC
The set of
The routes
We try to determine the offsets
Memetic-based schedule synthesis algorithm
In this section, we first give the motivation of schedule synthesis on TTNoC, and components’ representation of MSSA is also given. Then, the algorithm description is proposed, followed by discussion about the details, that is, fitness function and global and local search strategies.
Motivation
To show the schedule synthesis problem, we first give an example of messages communication on a
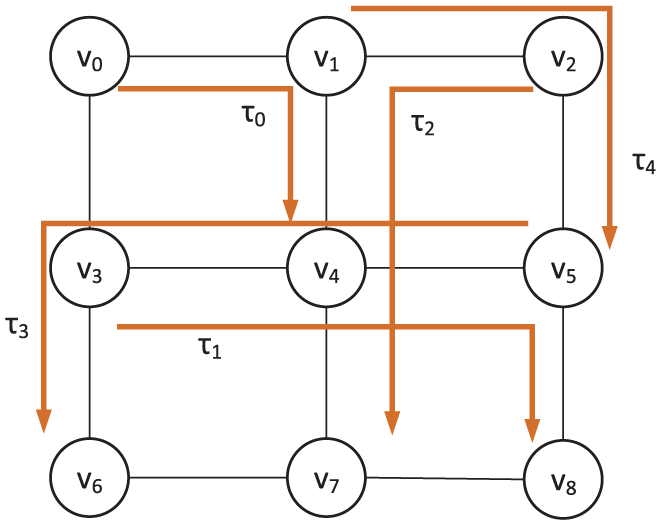
Motivation of messages communication on the TTNoC.
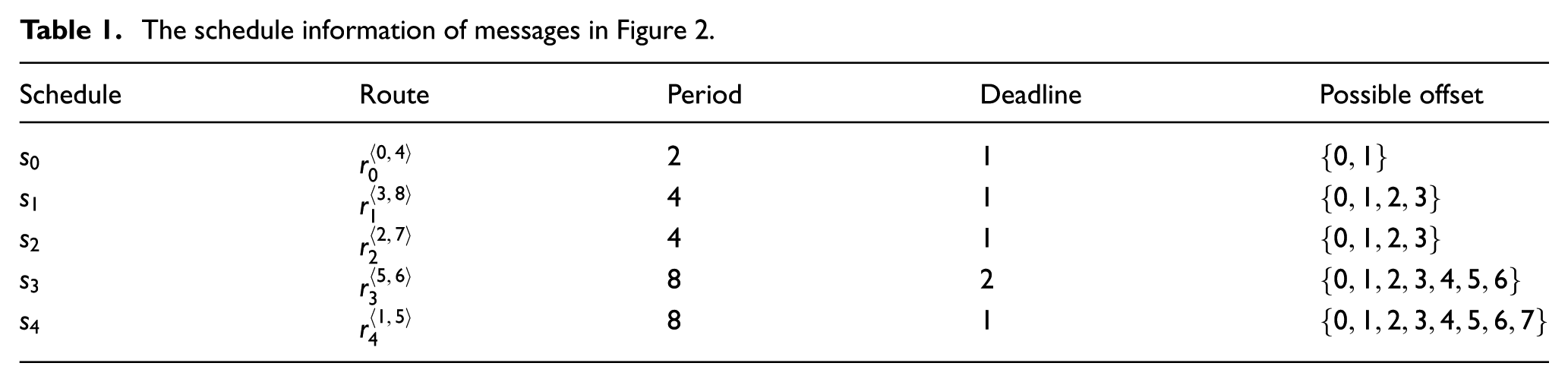
And Table 1 shows the schedule information of messages on the TTNoC. The nodes on the TTNoC is denoted as
The schedule information of messages in Figure 2.
Components representation
The MSSA requires genetic representation which is similar with general GA. MSSA adopts the hyperperiod
The population with two individuals in our motivation from Table 1 is proposed in Table 2. For individual
The component representation of the population consists of two individuals.

Algorithm description
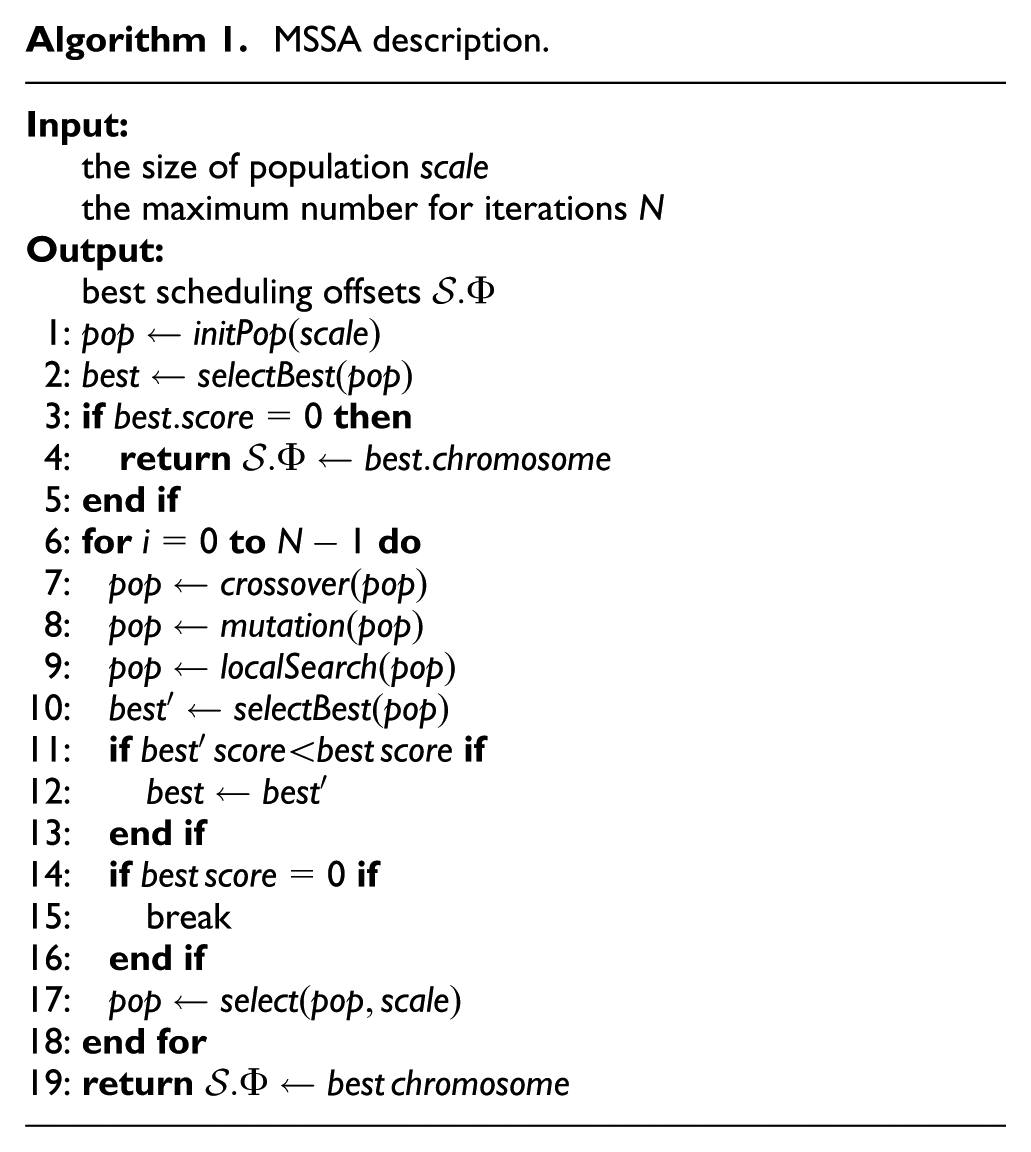
Memetic algorithm (MA) is widely used as a synergy of evolutionary or any population-based approach with separate individual learning or local improvement procedures for solution search.27,28 Based on MA, MSSA consists global search and local search. We deploy the GA as the global search strategy. And the subset of infeasible schedule is chosen as the element to join the local search.
We formally give the algorithm as in Algorithm 1. When the MSSA starts, the offset of messages is generated randomly within the possible offsets by
Fitness function
The fitness function is to evaluate individuals in the population. To adopt the fitness function, we first determine the scenario of overlap among messages. And we transform chromosome to represent the communication time for messages in the hyperperiod. Then, the score of each individual can be acquired by the fitness function to evaluate the chromosome in Constraint 2.
By checking the forward routing for each message by Formula 4, we denote the set of overlapped schedule

Table 3 shows the route based on XY routing and overlapped set for the messages depicted in Table 1. Since
The route and overlapped set for schedule in Table 2.

The communication time of message in the kth period

where
The communication time in a hyperperiod for the schedule in Table 2.

For

If there is no conflict with

where the function

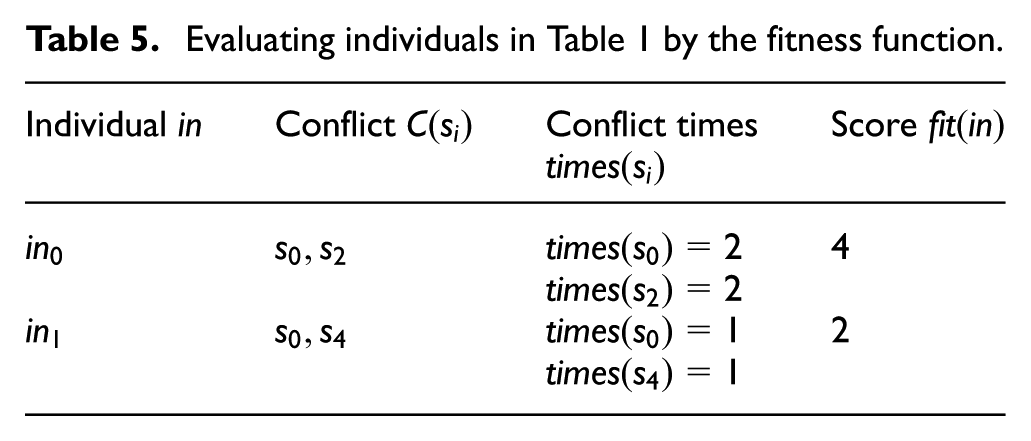
Since the score represents the times of conflicts, the lower the score, the better the individual is, and the individual with score zero represents a feasible schedule. The score of two individuals in Table 2 is shown in Table 5.
Evaluating individuals in Table 1 by the fitness function.
Global search strategy
The general operation in a GA, such as crossover and mutation,
29
is used in the step of global search. For operation of crossover, we employ two of the individuals

to represent the possibility for
An example of the crossover between individuals in Table 2.

The operation of mutation randomly selects an offset and reallocate a new offset randomly in its possible offset. Table 7 is an example of mutation. It is noticed that the probability of mutation for each individual in our implement is 10%.
An example of the mutation for individuals in Table 2.

Local search strategy
Before the local search for each individual, the schedule
Table 8 shows an example of local search for
Local search for individual

Evaluations
The network architecture we employed for simulation is a 2D mesh network whose scale is
Failure rate of schedule
The schedule of a message fails if the message communication faces contention with other messages based on this given schedule. To compare the performance of schedule synthesis of MSSA with GA, we define the failure schedule of messages as

The failure rate of different number of messages on varying architectures: (a) 3 × 3 TTNoC, (b) 5 × 5 TTNoC, (c) 7 × 7 TTNoC, (d) 9 × 9 TTNoC, (e) 11 × 11 TTNoC, and (f) 13 × 13 TTNoC.
We define
The average failure rate of schedule in different scale of TTNoC.

Feasible cases
We consider the number of feasible cases in each experiment type. The schedule for all messages on TTNoC is feasible when there is no conflict between communication of messages in both spatial and temporal domains. In other words, a case of communication is feasible if each synthesized schedule of message
Figure 4 presents the result of numbers of feasible cases in different scale of architecture after the schedule synthesis. For simple test cases with less than 15 messages, most of the cases are feasible. But for complex test cases of more than 60 messages, it is hard for MSSA to find a feasible schedule.

The number of feasible cases in different scale of TTNoC and number of messages.
Discussion
Synthesizing a feasible schedule depends on the number of messages, the route of messages, and the scale of TTNoC. It is hard for MSSA to synthesize a feasible scheduling when the set of messages is large and/or the scale of TTNoC architecture is small. However, except two reasons above, the mapping between messages and nodes as well as routing strategy also affect generating a feasible solution. The designer can manually change the mapping allocation or the routing strategy for the failure schedule or even design a larger scale of network architecture if needed. After these changes, the feasible scheduling can be generated by the MSSA iteratively.
Conclusion and future work
This article proposes an MSSA to synthesize the schedule for message communication on the TTNoC. MSSA deploys the GA as the global search strategy, and the subset of infeasible schedule is chosen as the element to minimize its contention times. We evaluate our MSSA and general GA with various randomly generated messages on varying scales of mesh-based TTNoC. The results show that our MSSA is effective to synthesize a schedule with less infeasible message communication, which is 34.2% compared with the general GA. In our future work, the mapping between messages and nodes and routing strategy will be integrated to our consideration before scheduling of messages on the TTNoC. And the different TTNoC architecture, for example, torus and hypercube, and different local search strategies, for example, simulated annealing, will also be implemented in our evaluations for the improvement of schedule synthesis performance.
Footnotes
Handling Editor: Xiuzhen Cheng
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is sponsored in part by NSFC Program (No. 61527812), National Science and Technology Major Project (No. 2016ZX01038101), MIIT IT funds (Research and Application of TCN Key Technologies) of China, and The National Key Technology R&D Program (No. 2015BAG14B01-02).