
Abstract
In delay-tolerant wireless sensor networks, messages for sensor data are delivered using opportunistic contacts between intermittently connected nodes. Since there is no stable end-to-end routing path like the Internet and mobile nodes operate on battery, an energy-efficient routing protocol is needed. In this article, we consider the probabilistic routing protocol using history of encounters and transitivity protocol as the base protocol. Then, we propose an energy-aware routing protocol in intermittently connected delay-tolerant wireless sensor networks, where messages are forwarded based on the node’s remaining battery, delivery predictability, and type of nodes. The performance of the proposed protocol is compared with that of probabilistic routing protocol using history of encounters and transitivity and probabilistic routing protocol using history of encounters and transitivity with periodic sleep in detail, from the aspects of delivery ratio, overhead ratio, delivery latency, and ratio of alive nodes. Simulation results show that the proposed protocol has better delivery probability, overhead ratio, and ratio of alive nodes, in most of the considered parameter settings, in spite of a small increase in delivery latency.
Keywords
Introduction
Intermittently connected delay-tolerant wireless sensor networks need an interworking of wireless sensor networks and delay-tolerant network (DTN) technologies. In intermittently connected delay-tolerant wireless sensor networks, there is no infrastructure as well as no stable end-to-end routing path between a source node and a destination, and therefore, sensor data are delivered via intermittently connected intermediate nodes using opportunistic contacts between them. 1 Intermittently connected delay-tolerant wireless sensor networks have characteristics of both wireless sensor networks and DTNs, such as battery operated nodes, low processing power, small buffer size, short communication range, and intermittent connectivity between nodes. 2 Therefore, technical issues related to intermittently connected delay-tolerant wireless sensor networks are very challenging to overcome. Although numerous works on wireless sensor networks and DTNs have been performed individually, works on integrating these two network technologies together have not been carried out to a great extent, since it is not easy to combine these two issues together, 1 and they need significant future works.
Out of the works related to the link layer, the network layer, and the transport layer for intermittently connected delay-tolerant wireless sensor networks, we are interested in the network layer in this article. Since there is no stable end-to-end routing path between a source node and a destination node, an efficient delay-tolerant routing protocol to deliver messages for sensor data is needed, especially from the aspect of energy efficiency. In this article, we assume a disaster environment as an example for applying sensor networks, where all communication infrastructures are destroyed, and thus, delivery of emergency messages or sensor data such as detection of alive people should be carried out appropriately via the store-carry-forward mechanism through intermittently connected mobile nodes, such as pedestrians, cars, and trams, as shown in Figure 1. In Figure 1, emergency messages or messages for sensor data are generated at mobile nodes and these messages are delivered to a stationary sink node via intermediate mobile nodes. The sink node is assumed to be located at the intersection of tram routes for efficient gathering of sensor data, and the gathered data are delivered to the external network through a gateway router.
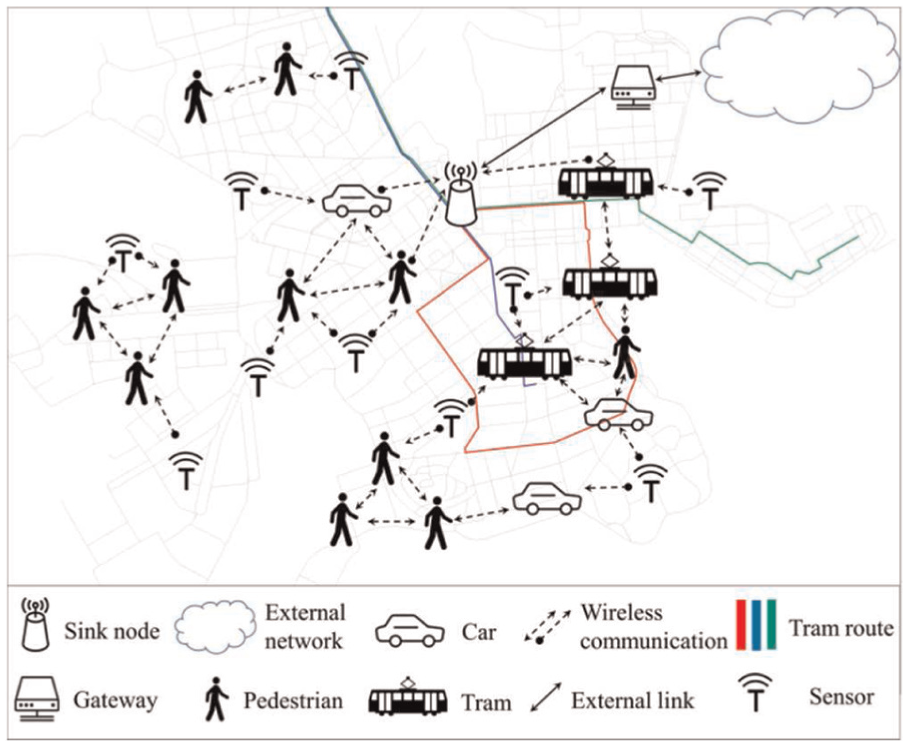
A considered network scenario.
In this article, we consider probabilistic routing protocol using history of encounters and transitivity (PRoPHET) protocol as the base protocol. In PRoPHET protocol, delivery predictability is obtained based on the contact history between nodes, and a message is forwarded to a node with higher delivery predictability. 3 Although the PRoPHET protocol was not originally proposed for wireless sensor networks but for general delay/disruption tolerant network, the PRoPHET protocol was widely used for data delivery in intermittently connected wireless sensor networks, such as the work in Kaur et al., 4 Rajpoot and Kushwah, 5 Agarwal and Bhadouria, 6 and Mezouary et al. 7 In Tao et al., 8 Lai et al., 9 and Soares and Rocha, 10 the PRoPHET protocol was used as a comparing protocol with the proposed protocol for wireless sensor network in intermittently connected networks. Furthermore, the PRoPHET protocol is the only routing protocol standardized as request for comment (RFC) in the Internet Research Task Force (IRTF), 3 and thus, it is regarded as a representative DTN protocol for intermittently connected networks, although it is not specialized for wireless sensor networks.
In this article, the objective of the proposed protocol is to deliver messages for sensor data efficiently, from the aspect of energy efficiency. To this end, in the proposed energy-efficient opportunistic routing protocol, the energy level of a pedestrian and a car is divided into three levels, that is, high, medium, and low energy levels. Then, sending and receiving operations are carried out based on the energy levels of sending and receiving nodes as well as delivery predictability. The basic idea of the proposed protocol is to let the sending node itself deliver a message to the destination node when it has sufficient energy and to restrict message forwarding so as not to consume the battery energy of receiver nodes. Also, it is noted that trams have enough battery power and buffer storage, and thus, they can be used as a message bearer to a sink node. Furthermore, if the contact node is a tram, messages are forwarded to the tram without checking the energy levels of the sending and receiving nodes. Finally, once messages have been forwarded to a tram before, the messages are not forwarded to a pedestrian and a car anymore, and the messages are delivered to a sink or tram node only.
The idea of the proposed protocol is similar to our previous works in Kang and Chung, 11 but the proposed work is different from the previous work in the following aspects:
Sensor environment is considered by placing a sink node in a network, and only communication from mobile nodes to a sink node is considered.
The energy level of a tram is considered to be sufficiently large, and the tram acts as a sensor data bearer.
Type of nodes is considered for message forwarding. Once a message is forwarded to a tram, it is not forwarded to a pedestrian or a car anymore, and direct delivery to a sink node is possible.
In this article, we analyze the performance of the proposed protocol and compare the performance with both PRoPHET without any energy-efficient operation and PRoPHET with periodic sleep in detail, from the aspects of delivery ratio, overhead ratio, delivery latency, and ratio of alive nodes.
The remainder of this article is organized as follows: section “Related works” summarizes the related works. In section “The proposed protocol,” a detailed algorithm of the proposed routing protocol is illustrated. Section “Numerical examples” presents numerical examples. Finally, section “Conclusion and future work” concludes this work and presents future works.
Related works
In a conventional wireless ad hoc or sensor network, where there exists a routing path from a source node to a sink node, geographic position information of nodes can be used to deliver sensor data to a sink node with known position.12,13 In geographic routing, packets are forwarded greedily using location information of nodes. Das et al. 14 proposed a coverage-tree heuristic-based routing scheme when greedy forwarding fails, contrary to the conventional perimeter forwarding or cross link detection protocol. Then, the authors showed that the proposed scheme is better than the competitive schemes.
In DTNs, however, connectivity between nodes is not guaranteed and geographic position information is not available generally. Thus, a message is delivered to a destination node via opportunistic contacts between intermediate nodes. Examples applying the concept of DTN include inter-planetary communication in deep space and communication in disaster environment.15,16 The simplest routing protocol for DTN is the epidemic routing protocol, where each node with a message forwards it to the other nodes whenever it meets them, if they do not have the message already. Although the flooding-based epidemic routing protocol is powerful, it has a significant drawback of high message overhead. To mitigate the high overhead in the epidemic routing protocol, 17 several protocols have been proposed such as spray and wait protocol and PRoPHET protocol, 3 where forwarding of messages is determined based on some criteria. Raveneau et al. 18 proposed a DTN routing protocol called as frequency routing, encounters, and keenness (FREAK) for wireless sensor networks, where the basic assumption is that future contact rate can be predicted based on the past contact history. Due to the constraints of wireless sensor network nodes such as low memory and low processing power, the contact frequency only with the destination sink node called base station is considered. Then, nodes with more contact frequency with the base station are selected as relays.
In DTN, nodes are operated using a battery, and thus, an energy-efficient operation is crucial, especially for disaster environment. Cabacas et al. 19 compared the performance of the epidemic, Spray and Wait, PRoPHET, and MaxProp protocols from the aspects of the average remaining energy and the number of dead nodes, for varying the number of nodes, message size, message generation interval, and node speed. The authors showed the effect of the number of nodes, message size, message generation interval, and node speed on the average remaining energy and the number of unavailable nodes. Yoon et al. 20 analyzed the overall lifetime of various restricted epidemic routing protocols such as exclusion scheme, limited time scheme, and limited number of copies scheme, which allow a trade-off between the energy consumption and delivery latency efficiently.
Gao et al. 21 proposed an energy-aware spray and wait protocol, where the number of message copies forwarded is determined based on the utility function which is calculated using the node speed and remaining energy in the Spray phase. Kwon et al. 22 extended the utility function in Gao et al., 21 by considering the node’s movement direction additionally, where sensor network environment is assumed with a single sink node with known location information. Zhang et al. 23 considered the routing protocol with random sleep and developed the connectivity availability model to analyze the packet delivery ratio in wireless sensor networks. The authors developed a partially connected routing protocol and showed that it has a much higher packet delivery ratio and lower duty cycle within the tolerant delay than the fully connected routing protocol. Trullols-Cruces et al. 24 analyzed the trade-off of DTN, where nodes periodically turn off their wireless interface to save battery, from the aspects of searching and sleeping intervals and node contact duration. Ayub et al. 25 proposed a look a-head probabilistic energy-aware routing strategy. In the proposed work, each node has energy manager and manages the battery power, which is divided into energy for receiving relay messages and energy for receiving a message destined to itself. Energy manager calculates the energy required for receiving and forwarding based on the message size. Then, message is forwarded to another node if the delivery predictability of the receiving node is higher than a threshold limit and both the forwarding node and receiving node have sufficient energy to forward and receive the message.
Significant works on the energy-efficient medium access control (MAC) protocol in wireless sensor networks have been carried out, too.26–29 In Ye et al., 26 sensor medium access control (S-MAC) protocol was proposed, where a node is put to sleep for a fixed period and it wakes up for the same period to listen to another node. In timeout medium access control (T-MAC) protocol, sleep and active durations are not fixed, but they are dynamically changed for more energy efficiency. That is, if there is no activity in active duration until the timer expires, it goes into the sleep state immediately. In Van Dam and Langendoen, 27 Berkeley medium access control (B-MAC) protocol was proposed, where a node transmits a long preamble when starting transmission, and the receiving node is in a low-power listening state and it periodically wakes up to check the preamble. 28 To overcome the problem of the long preamble of the B-MAC protocol, the X-MAC protocol was proposed, where the concept of a slotted preamble was used. 29
The proposed protocol
Figure 2 shows the flowchart of the proposed protocol and the notations are defined as follows:
E(S)RD: the remaining energy of a sender node.
E(R)RD: the remaining energy of a receiver node.
P(S,D): delivery predictability of a sender node to a destination node.
P(R,D): delivery predictability of a receiver node to a destination node.

Flowchart of the proposed protocol.
In the proposed energy-aware routing protocol, the energy level of a pedestrian and a car is divided into three levels, that is, high, medium, and low energy levels. We note that the energy of a sink node and a tram is infinite since a stable powerline is provided. Then, sending and receiving operations are carried out based on the energy levels of sending and receiving nodes as well as delivery predictability, if the receiving node is either a pedestrian or a car. Otherwise, messages are always delivered to the tram node.
As shown in Figure 1, when two nodes contact each other, they exchange a summary vector which includes the list of messages they have in their buffer. If the contact node is a sink node or a tram, all messages are forwarded to that node. Otherwise, if a node finds that it has any message which is not stored in the other node’s buffer, it acts as a sending node of the message and checks whether the message is forwarded to a tram before. If it is so, the message is not forwarded to the receiving node anymore. Otherwise, the decision of forwarding is made based on the energy levels of the sending node and the receiving node.
If the energy level of the sender is high, then it compares its delivery predictability for the message with a predefined value of PSDR. If delivery predictability of the considered message is larger than the value of PSDR, then the sender node does not forward it to the other node. This is because it is more preferable to deliver it to the destination node by itself since it has enough energy to meet the destination node. If the energy level of the sender is either medium or low, or if the energy level of the sender is high level and the delivery predictability of the considered message is smaller than or equal to the value of PSDR, the decision regarding whether the sender sends the message to the receiver will be made based on the energy level of the receiver and the relationship between the delivery predictabilities of the sender and the receiver.
If the energy level of the receiver is low, the message is forwarded only if the delivery predictability of the receiver for the considered message is higher than the sum of the delivery predictability of the sender and the threshold value of PRCV, where the concept of threshold is introduced in order to use the receiving node in a low energy level to deliver a message if it has much larger delivery predictability than that of the sender. If the energy level of the receiver is medium, the message is forwarded if the delivery predictability of the receiver for the considered message is higher than the delivery predictability of the sender, which is the same as the basic forwarding rule of PRoPHET protocol. If the energy level of the receiver is high, the message is forwarded to the receiver unconditionally without comparing the delivery predictabilities.
Numerical examples
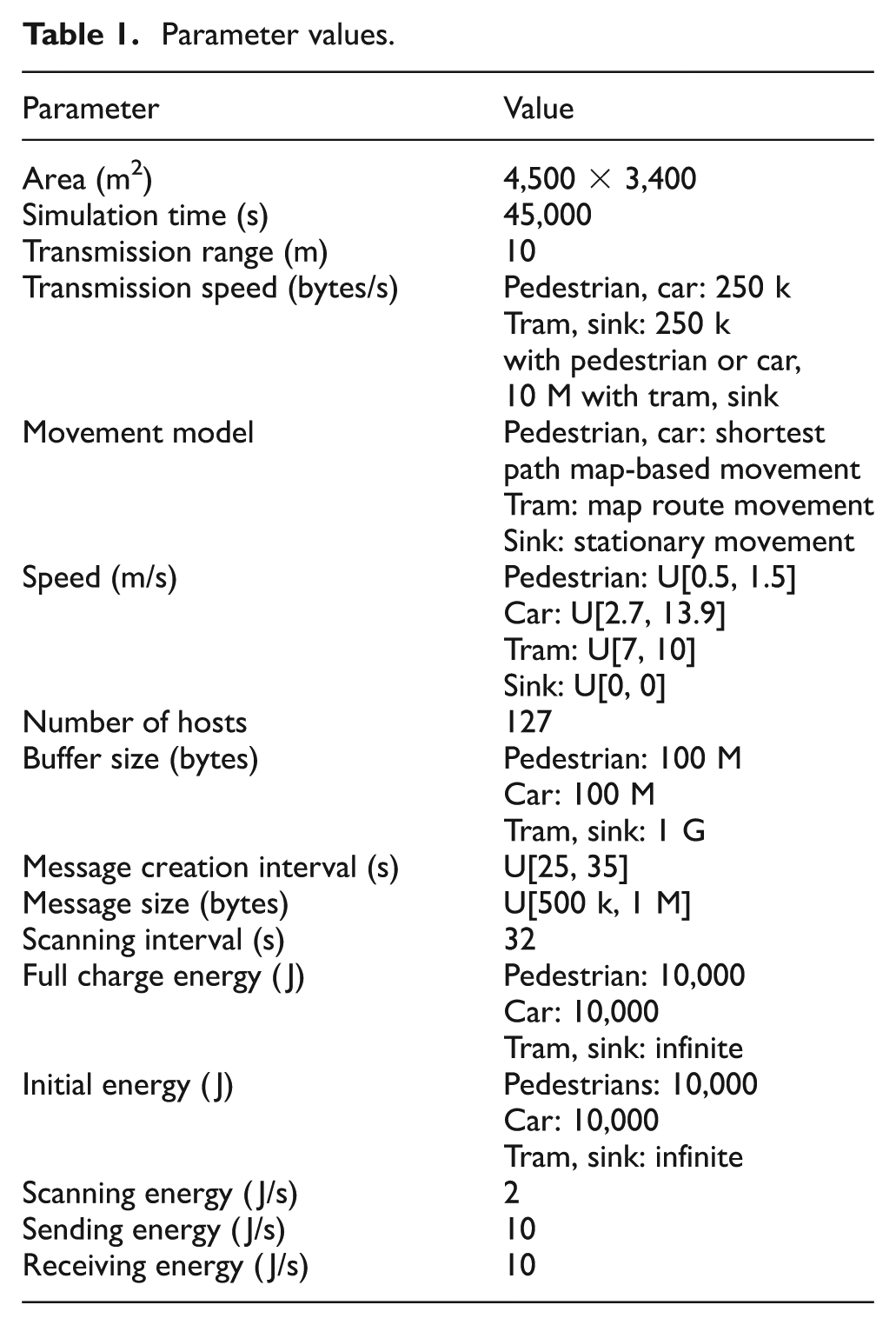
In numerical examples, we compare the performance of the proposed protocol with PRoPHET protocol and PRoPHET protocol with a power saving mode, which is denoted by PRoPHET(ON/OFF), from the aspects of delivery probability, overhead ratio, delivery latency, and ratio of alive nodes, for varying the values of PRCV, PSDR, and simulation time using the Opportunistic Network Environment (ONE) simulator.30,31 In PRoPHET(ON/OFF), the mode of radio interface of a node is alternating between the active mode and the power saving mode to save energy, and the duty ratio is assumed to be 1/2 in the numerical examples. Table 1 shows the parameter values assumed in the numerical examples.
Parameter values.
Figures 3–5 show the delivery probability, overhead ratio, and delivery latency, respectively, for varying the values of PRCV, with Emax = 0.8 and PSDR = 0.5. As shown in Figure 3, the proposed protocol with all considered values of Emin has a larger delivery probability than PRoPHET and PRoPHET(ON/OFF). The proposed protocol has a higher delivery probability for higher values of Emin. This result shows the effectiveness of the proposed protocol from the aspect of delivery probability. As expected, the delivery probability of the PRoPHET(ON/OFF) is the smallest since if a node is in a power saving mode, communication with another node is not possible, and thus, it results in performance degradation, from the aspect of delivery probability.

Delivery probability for varying the values of PRCV.

Overhead ratio for varying the values of PRCV.

Delivery latency for varying the values of PRCV.
As shown in Figure 4, the proposed protocol with all considered values of Emin has a smaller overhead ratio than PRoPHET and PRoPHET(ON/OFF). PRoPHET(ON/OFF) has the largest overhead ratio. The proposed protocol has a smaller overhead ratio for higher values of Emin. This result shows that the proposed protocol achieves a higher delivery probability even though the overhead ratio is the smallest, for the varying value of Emin.
As shown in Figure 5, the delivery latency of the proposed protocol is higher than that of PRoPHET, but it is slightly higher than that of PRoPHET(ON/OFF). From the results, it can be concluded that the proposed protocol has better delivery probability and overhead ratio, in spite of a small increase in delivery latency.
Figure 6 shows the ratio of alive nodes, with Emax = 0.8 and PSDR = 0.5. As shown in Figure 6, the ratio of alive nodes of the proposed protocol is much higher than that of PRoPHET. Also, the ratio of alive nodes of the proposed protocol is higher than that of PRoPHET(ON/OFF) when Emin is high for large values of PRCV, whereas it is smaller when Emin is small. The proposed protocol has a higher ratio of alive nodes for higher values of Emin. The results presented in Figure 6 show that the proposed protocol always has a longer network lifetime than PRoPHET. Also, the proposed protocol has a longer lifetime than PRoPHET(ON/OFF) if the values of Emin and PRCV are appropriately selected.
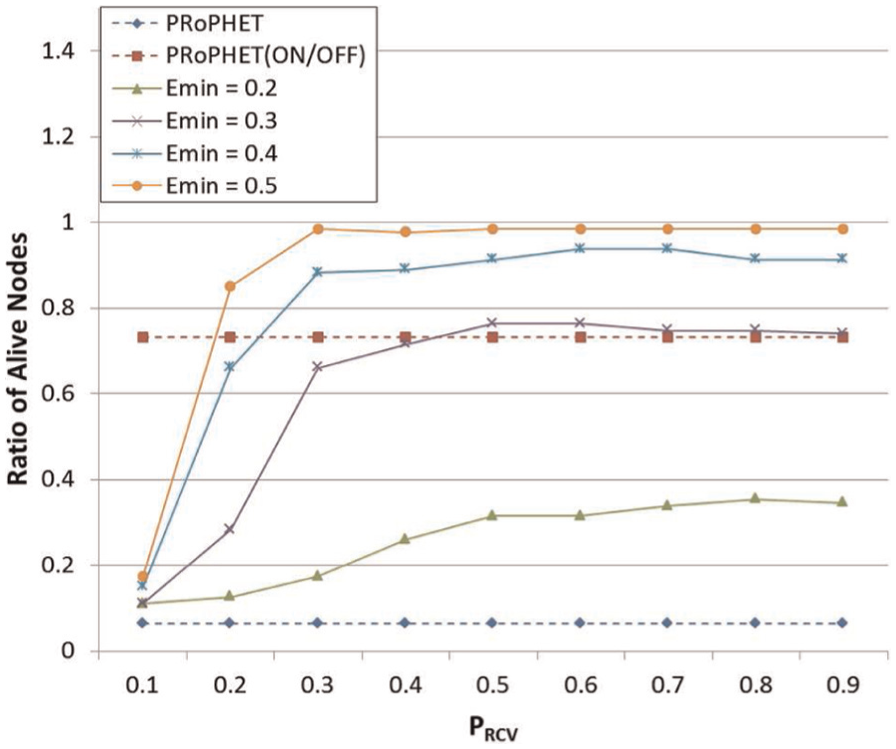
Ratio of alive nodes for varying the values of PRCV.
Figures 7–10 show the delivery probability, overhead ratio, delivery latency, and ratio of alive nodes, respectively, for varying the values of PSDR, with Emin = 0.3 and PRCV = 0.5. As shown in Figure 7, the proposed protocol with all considered values of Emax has a larger delivery probability than PRoPHET and PRoPHET(ON/OFF). and the results show the effectiveness of the proposed protocol. As expected, the delivery predictability of the PRoPHET(ON/OFF) is the smallest.
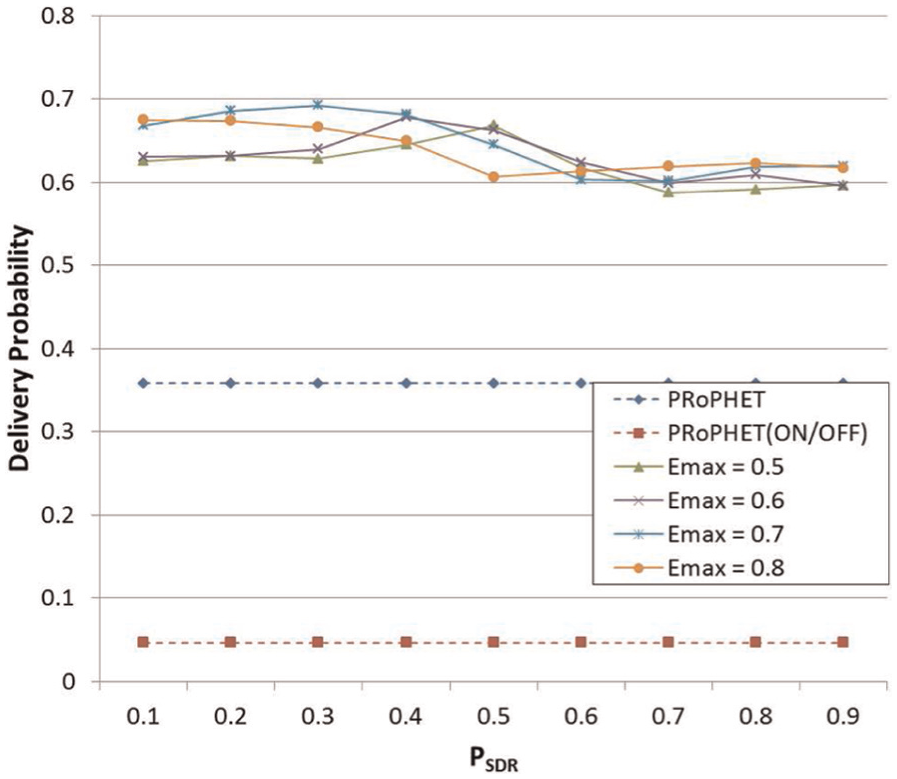
Delivery probability for varying the values of PSDR.

Overhead ratio for varying the values of PSDR.

Delivery latency for varying the values of PSDR.
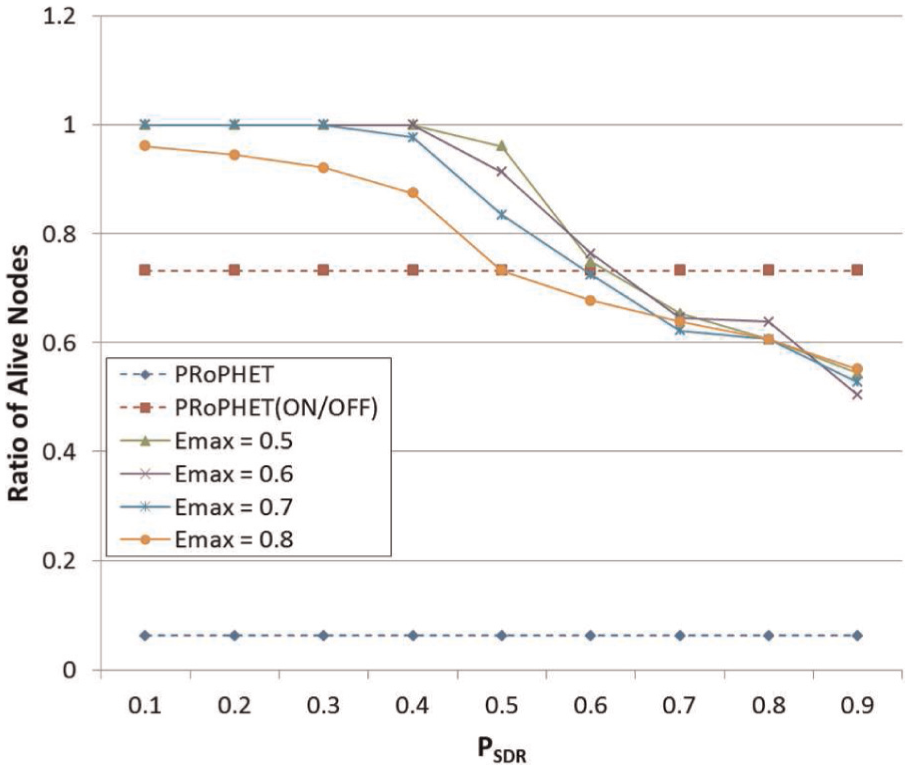
Ratio of alive nodes for varying the values of PSDR.
As shown in Figure 8, the proposed protocol with all considered values of Emax has a smaller overhead ratio than PRoPHET and PRoPHET(ON/OFF). PRoPHET(ON/OFF) has the largest overhead ratio. This result shows that the proposed protocol achieves a higher delivery probability even though the overhead ratio is the smallest, for the varying value of Emax.
As shown in Figure 9, the delivery latency of the proposed protocol is higher than that of PRoPHET, but it is slightly higher than that of PRoPHET(ON/OFF). From the results presented in Figures 7–9, it can be concluded that the proposed protocol has better delivery probability and overhead ratio, in spite of a small increase in delivery latency.
As shown in Figure 10, the ratio of alive nodes of the proposed protocol is much higher than that of PRoPHET. Also, the ratio of alive nodes of the proposed protocol is higher than that of PRoPHET(ON/OFF) with all considered values of Emax for a small value of PSDR. But it is smaller when PSDR is high. The results show that the proposed protocol always has a longer network lifetime than PRoPHET. Also, the proposed protocol has a longer lifetime than PRoPHET(ON/OFF) if the values of Emax and PSDR are appropriately selected.
Figures 11–14 show the delivery probability, overhead ratio, delivery latency, and ratio of alive nodes, respectively, for varying values of buffer size, with PSDR = 0.5 and PRCV = 0.5. As shown in Figure 11, the proposed protocol with all considered values of Emin and Emax has larger delivery probability than PRoPHET and PRoPHET(ON/OFF). This result shows the effectiveness of the proposed protocol from the aspect of delivery probability. The delivery probability of the PRoPHET(ON/OFF) is the smallest since if a node is in a power saving mode, communication with another node is not possible, and thus, it results in a decrease in the delivery probability.

Delivery probability for varying the values of buffer size.
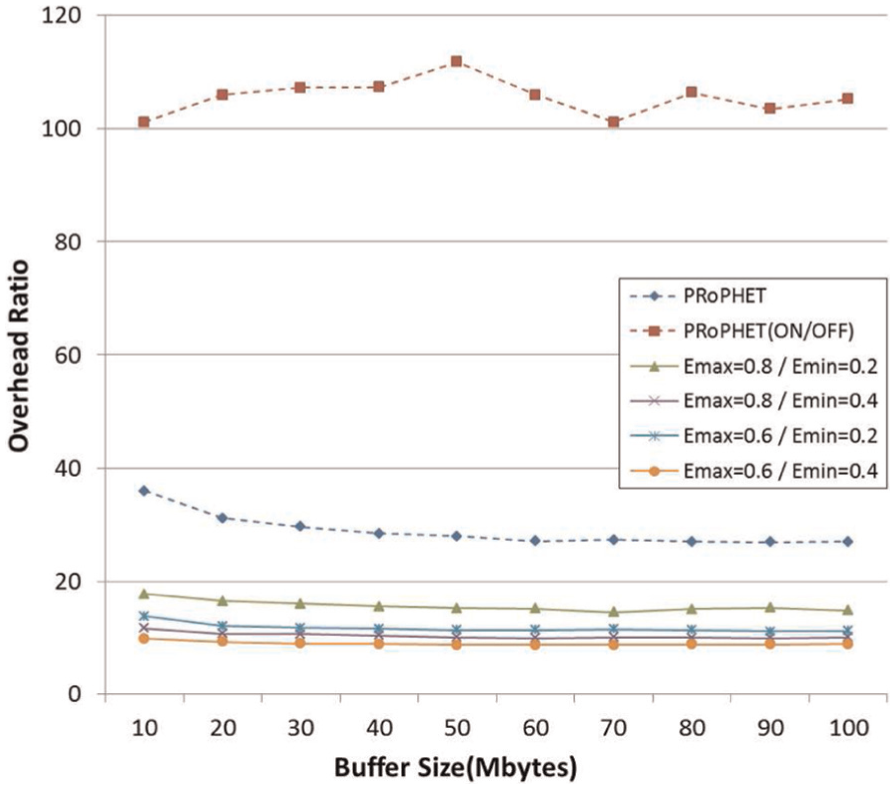
Overhead ratio for varying the values of buffer size.

Delivery latency for varying the values of buffer size.
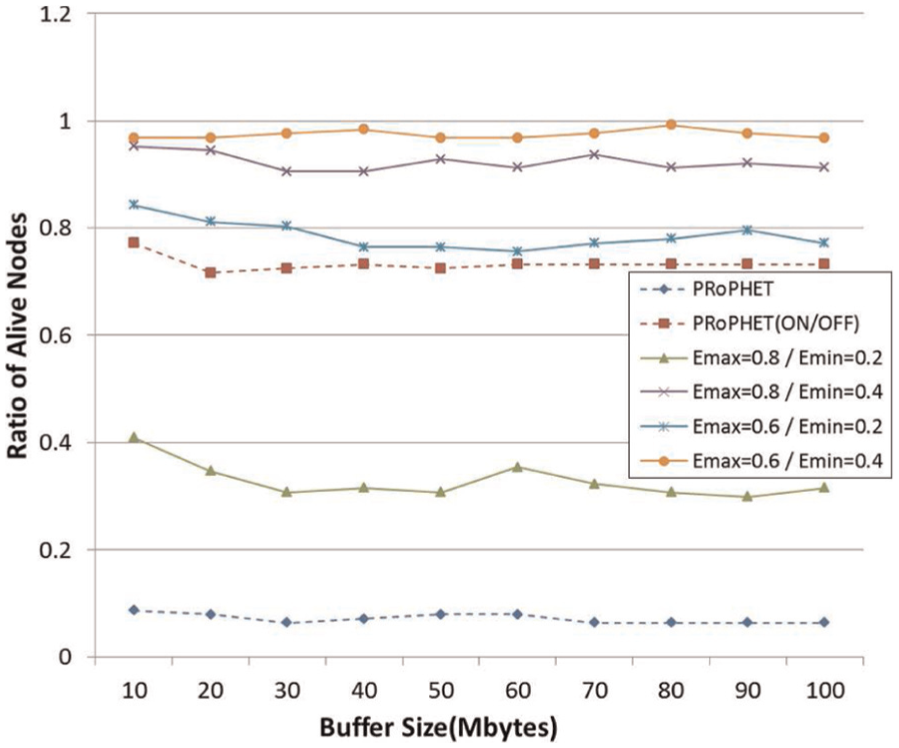
Ratio of alive nodes for varying the values of buffer size.
As shown in Figure 12, the proposed protocol with all considered values of Emin and Emax has a smaller overhead ratio than PRoPHET and PRoPHET(ON/OFF). PRoPHET(ON/OFF) has the largest overhead ratio. This result shows that the proposed protocol achieves a higher delivery probability even though the overhead ratio is the smallest, for the varying value of Emin and Emax.
As shown in Figure 13, the delivery latency of the proposed protocol is higher than that of PRoPHET, but it is similar to that of PRoPHET(ON/OFF). From the results presented in Figures 11–13, it can be concluded that the proposed protocol has better delivery probability and overhead ratio, in spite of a small increase in delivery latency.
As shown in Figure 14, the ratio of alive nodes of the proposed protocol is much higher than that of PRoPHET, and it is higher than that of PRoPHET(ON/OFF) with all considered combinations of values of Emin and Emax, except Emin = 0.2 and Emax = 0.8. The results presented in Figure 14 show that the proposed protocol always has a longer network lifetime than PRoPHET. Also, the proposed protocol has a longer lifetime than PRoPHET(ON/OFF) if the values of Emin and Emax are appropriately selected.
Figure 15 shows the ratio of alive nodes for varying the values of the simulation time with various sets of values of Emin and Emax. As shown in Figure 15, PRoPHET has the smallest value, as expected. The proposed protocol always has a higher value than PRoPHET in all considered values of Emin and Emax. Also, the proposed protocol has a larger value than PRoPHET(ON/OFF) in most values of Emin and Emax, except for Emin = 0.2 and Emax = 0.8. This shows that the proposed protocol can have a larger network lifetime than PRoPHET(ON/OFF) if the values of Emin and Emax are chosen appropriately.

Ratio of alive nodes for varying the simulation time.
Conclusion and future work
In this article, we proposed a novel energy-aware routing protocol in intermittently connected delay-tolerant wireless sensor networks, where messages are forwarded based on the node’s remaining battery, delivery predictability, and type of nodes. Then, we analyzed the performance of the proposed protocol and compared the performance with PRoPHET and PRoPHET with periodic sleep in detail, from the aspects of delivery ratio, overhead ratio, delivery latency, and ratio of alive nodes. Simulation results showed that the proposed protocol has better delivery probability, overhead ratio, and ratio of alive nodes, in most of the considered parameter settings, in spite of a small increase in delivery latency.
In our further study, work on how to dynamically decide the appropriate parameter values of Emin, Emax, PSDR, PRCV, and so on in varying network environments will be carried out. Then, a novel scheme of optimally selecting parameters will be derived and analyzed. Also, cross-layer work integrating network protocol with energy-efficient MAC protocol will be carried out, too. Finally, an optimal cross-layer protocol will be drawn and the performance of the optimal protocol will be analyzed in detail.
Footnotes
Academic Editor: Chunming Qiao
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported, in part, by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science, ICT and Future Planning (NRF-2016R1D1A1B03930299).