
Abstract
In this article, a new TDMA based wireless sensor network (WSN), MILMON, is proposed for military monitoring. The most important design considerations of MILMON are energy consumption, delay, scalability, and fault tolerance. There are three main components of the system: a new time synchronization schema based on the sink with a high range transmitter, hr-FTSP; data indicator slot mechanism, DISM; and a new distributed time-scheduling mechanism ft_DTSM. An analytic and simulation model has shown that energy consumption and delay performance of the newly proposed system is better than most of the existing WSN systems. Although there may be other architectures which perform better than our system for certain performance metrics, MILMON can operate with a good balance on energy consumption, delay, and fault tolerance.
Introduction
Wireless sensor networks (WSNs) are composed of small, battery-powered sensor nodes which include sensor(s), a processor, and a communication circuit. With the help of collaborative work of sensor nodes, it is possible to create smart environments. Although WSN can be used for civilian applications like the environment, health, or structure monitoring, one of the most common WSN application areas is military. In this article, a new wireless sensor network system, MILMON, is proposed for military monitoring. The main design considerations of MILMON are energy consumption, delay, scalability, and fault tolerance.
The scarcest resource for most of the wireless sensor networks is energy and the dominant factor in energy consumption for sensor nodes is communication [1]. Not only transmission but also reception is the source of the energy consumption. The lore to decrease energy consumption is to turn off the radio circuit when it is not needed. This is why TDMA-based systems have advantages over contention-based methods to decrease WSN energy consumption [2]. The common problem of TDMA based WSN is delay. LEACH [3], SMACS [4], two-tiered architecture [5], TRAMA [6], and FLAMA [7] are TDMA-based WSN systems.
LEACH is a self-organizing, adaptive clustering protocol that uses randomization to distribute the energy load evenly among the sensors in the network [3]. Although LEACH can reduce the power consumption, there is a problem with the assumptions of LEACH. LEACH assumes that all the nodes can hear each other. So LEACH is not suitable to be used in large areas. SMACS is another sensor network that uses TDMA [4]. However, SMACS needs FDMA as well as TDMA, but sensor nodes are so tiny and limited that current sensor nodes cannot meet the requirements of SMACS. Another TDMA-based sensor network proposal is a two-tiered structural health monitoring wireless sensor network architecture [5]. According to this structure, there are fixed cluster heads and sensor nodes. However, there is only a one hop communication between sensor nodes and the sink and it cannot be used in large areas. TRAMA [6] and FLAMA [7] are TDMA-based systems that use contention based periods for slot distribution and synchronization. They use the TDMA-based period for data traffic, and the contention based period for the time slot assignment, synchronization, and maintenance of the network. Although TRAMA or FLAMA produces a more flexible and fault-tolerant network with the help of its contention based period, it consumes a considerable amount of energy in its random access based periods.
There are also many studies on collision based WSN, like S-MAC [8], T-MAC [9], WiseMAC [11], SyncWUF [12], D-MAC [10], PELLMAC [13], CC-MAC [14]. S-MAC and T-MAC can be considered as a WSN adaptation of 802.11. While 802.11 listens to the medium constantly, S-MAC has a periodic sleep-listen mechanism. Nodes listen to the medium with a certain portion of time. Although it consumes less energy then 802.11, its energy consumption is very high. Although T-MAC can reduce energy consumption of S-MAC, it also relies on the same principle with S-MAC, and its energy consumption is still a serious problem. Correlation-based Collaborative MAC (CCMAC) protocol [14] regulates medium access and prevents redundant transmissions from closely located sensors to reduce energy consumption. Another technique to save energy is to synchronize neighbor nodes by sending a very long preamble signal. B-MAC is one of the most known samples of this MAC layer family. B-MAC uses a long preamble signal to synchronize the neighbor nodes. The sender node sends a very long preamble, so that all neighbor nodes can receive its preamble. At the end of the preamble signal, the sender node sends its data. The main problem of B-MAC is energy consumption while sending and receiving a very long preamble. WiseMAC is another preamble signal based WSN system that keeps the sleep-listen periods of its neighbors to shorten the length of the preamble signal. It can reduce energy consumption and delay. The main drawbacks of WiseMAC are a hidden terminal problem. SyncWUF is an enhanced version of WiseMAC so that it can save more energy than WiseMAC under low traffic requirements [12]. D-MAC is a contention based WSN MAC layer [10], and its main design considerations are energy efficiency and delay. It can be summarized as Slotted Aloha in which slots are assigned to decrease delay. The main problem of D-MAC is that collision may occur, while the neighbor nodes are trying to send data to the same node. Although PELLMAC [13] tries to resolve this problem, it is not scalable.
In this article, a new TDMA-based military monitoring wireless sensor network system is proposed. Its design considerations are energy efficiency, delay sensitivity, scalability, and fault tolerance. There are three main components of MILMON: Synchronization with a High Range Transmitter (hr-FTSP) [16], Data Indicator Slot Mechanism (DISM) [19], and Fault Tolerant Distributed Time Slot Assignment Algorithm (ft_DTSM) [20]. The individual components of MILMON are already proposed. The main contribution of this article is to create a new WSN for military monitoring with the proposed mechanisms and to investigate the performance of the resulting system.
The organization of the article is as follows. In Section 2, a sample application scenario and the system design of MILMON are stated. In Section 3, the basic mechanisms of our military monitoring system, hr-FTSP, DISM, and ft_DTSM are presented. In Section 4, the performance results of MILMON are outlined. Section 5 states the conclusion.
A Sample Scenario and the System Design
Before explaining the design considerations and system design details, some application scenarios help to understand our new military monitoring system.
A Sample Scenario
Assume that there are some terrorist activities from one country to another. The country that has terrorist groups cannot suppress the terrorist activities. Fortunately, the geographic structure of the region does not allow passing easily. There are some known paths used frequently by the terrorists. A gendarme station is deployed to stop the terrorist attacks. The weather conditions of the region are very harsh. Most of the time, it can be quiet foggy and poor visibility conditions are very dangerous for the guards. Satellite systems are very expensive and ineffective, if there is no line of sight. Costly thermal cameras are limited and sometimes unavailable. Maintenance of the cameras is another problem. A WSN system can be a cost-effective solution for military monitoring.
In this scenario, the sensor nodes should be deployed randomly. It must be a self-configuring and scalable WSN. The scale of the coverage area may vary. The network lifetime of MILMON must be maximized. In this sense, energy consumption should be minimized. The environmental conditions may cause the fault or malfunction of the nodes. The single point of failures of the sensor nodes should not affect the function of the whole network. MILMON must be fault tolerant. Delay is also very important for military applications. The terrorist activities should be reported as soon as possible.
MILMON can also be used in large areas, like the borders between two countries, if more than one sink with a high range transmitter are used. Although we are only interested in the system with one sink in this article, the system can be easily adopted for the systems with multiple sinks.
System Design
Basic Assumptions
The most interesting assumption of MILMON is the existence of a high range transmitter in the sink. The sink node has a high range transmitter as well as a low range transmitter. In this way, all the sensor nodes can receive broadcasts of the sink. The sink node has also a GPS and the clock drift of the sink is near zero. The sink with a high transmitter is not a usual assumption for WSN systems, but it is possible to use a sink with a high range transmitter, in certain WSN applications [15].
The other assumptions are as follows:
The power source of the sink is theoretically infinite. It is probably a laptop or PDA. The radio channel is symmetric. The data traffic is convergecast.
System Architecture
MILMON is developed to monitor a relatively large area against intruders and send the data about intruders to the sink as soon as possible. MILMON has three main components. These are a new low-energy consuming time synchronization method, hr-FTSP; a new fault tolerant distributed time slot assignment method for WSNs, ft-DTSM; and a new mechanism to decrease energy consumption of TDMA-based WSNs, DISM.
In a typical scenario, after the deployment of sensor nodes, the sink starts to send synchronization beacons with its high range transmitter. Sensor nodes receive the sink's beacon and synchronize themselves to the sink directly. After synchronization, time slots are distributed to the sensor nodes so that, delay can be minimized under convergecast traffic.
In a TDMA-based network, a parent node listens to its children nodes to check for the new data. However, in low traffic requirements, it causes idle listening. MILMON has also an additional technique to minimize idle listening.
Basic Mechanisms
In this section, the basic components of MILMON, Synchronization with A High Range Transmitter (hr-FTSP), Data Indicator Slot Mechanism (DISM), and Fault Tolerant Distributed Time Slot Assignment Algorithm (ft_DTSM), are presented.
Synchronization with High Range Transmitter (hr-FTSP)
TDMA-based networks require time synchronization. Most of the existing time synchronization schemes aim only to minimize the synchronization error, and energy efficiency is not one of their design considerations. In TDMA-based systems, the time synchronization mechanism is an important energy consumption source. In order to save energy, hr-FTSP [16] is developed as a modified version of Flooding Time Synchronization Protocol (FTSP), so that it uses the high range transmitter of the sink for energy saving and high precision. FTSP [17] uses only a broadcast which is sent from a sender to a receiver. In FTSP, the receiver does not reply to the message of the sender. FTSP uses a MAC-layer time stamping to reduce synchronization errors. With the help of the sender-to-receiver method and MAC-layer stamping, FTSP is one of the most successful WSN synchronization schemes in terms of energy consumption and precision [17].
hr-FTSP is based on the periodic beacon of the sink with a high range transmitter. The sink sends its periodic beacons in a special time slot. No other sensor node uses the sink's special time slot. When a sensor node can receive the sink's beacon, it synchronizes with the sink with the help of the synchronization methods of FTSP.
In hr-FTSP, clock skew, which is sourced from the instability of the oscillator, is handled by linear regression of the latest received time stamps. The latest time stamps are used for linear regression.
Fault Tolerant Distributed Time Scheduling Mechanism (ft_DTSM)
After synchronization, MILMON distributes time slots. The time slot assignment algorithm is an essential part of TDMA-based systems. Although there are many TDMA-based sensor network architectures which produce its time schedule centrally, they are not scalable [3].
Most of the existing distributed slot assignment algorithms for sensor networks are based on contention periods, like TRAMA [6] or FLAMA [7]. They include a random access period and this method increases power consumption of the system. Another approach for the distributed slot assignment is to use tiny time slots. After a series of handshaking, if a node can receive the required signal successfully, it gets the slot. All handshaking signal exchange takes place in tiny slots. There are existing mechanisms about time scheduling that use tiny slots [18, 19]. However, none of them considers energy efficiency, delay, and fault tolerance at the same time.
In our military monitoring system, a new tiny slot based time distribution system, ft_DTSM is proposed to produce energy efficient, fault tolerant, and low latency WSN [20]. ft_DTSM assumes that data traffic is convergecast. In convergecast traffic, data relays from the nodes into the sink. The sink collects all the data produced by the nodes. In ft_DTSM, sensor nodes always forward data to their neighbors that have a lower hop number.
Slot Organization
The slot organization of ft_DTSM is presented in Fig. 1. ft_DTSM assigns the slots in reservation frames. Every reservation frame begins with advertisement slots. Advertisement slots are used to construct fault tolerant topology. Every reservation frame is used for the corresponding hop numbered nodes. According to this hop numbered structure, in the first reservation frame, the nodes with hop number 1 can get slots. After that, the nodes with hop number 2 get the slots and so on.

Slot organization of ft_DTSM
Slot assignments for a specific hop number are performed in reservation slots. Each reservation slot corresponds to a specific available data transmission slot. For example, if a node can get a valid slot in the sth reservation slot of the fth reservation frame, its hop number becomes f and its slot number becomes s.
Before the signal exchange structure, the functionality of advertisement slots is explained. ft_DTSM distributes a certain number of data exchange slots where data traffic takes place. For every data exchange slot, there is a corresponding advertisement slot at the beginning of each reservation frame. The nodes that receive a valid slot in the last reservation frame send a special signal in its own advertisement slot. All the other nodes that do not have a valid slot listen to all advertisement slots. The node that sends an advertisement signal is a candidate router for the nodes that listen to advertisement slots. If a node receives signal(s) in the advertisement slots, there are some parent candidate neighbors of the receiving node. In this case, the node can compete for slot assignment.
Although one neighbor with a valid slot is sufficient to join the network, the resulting network cannot be fault tolerant. If there is only one candidate parent and if it fails, the connecting nodes cannot send their data. This problem is solved with the fault tolerance parameter, ft. If the total number of received signals in advertisement slots is less than ft, the node waits for the next advertisement signal sessions and it continues to collect more advertisement signals. In this way, the minimum number of the candidate router of a node is ft, and if the router of a node fails, it can change its router easily. For the sake of the completeness of the algorithm, the nodes that cannot have more than ft number of advertisement signals after a certain number of reservation frame structure, maxRF, also contend for a valid slot. A pseudo-code of the algorithm is presented in Fig. 2.

Pseudo for the usage of advertisement slots.
Signal exchange is designed based on four tiny slots. These are request slot, collision report slot, confirmation slot and, acknowledgement slot. The flowchart of the signal exchange is presented in Fig. 3.

Signal exchange flow diagram.
If a node can receive more than ft advertisement signals, in other words if a node has more than ft alternative parents, it starts to request a slot with a certain probability and sends a signal in the request slot. Let us assume that the hop number of the contending node is h. According to convergecast traffic requirement, only the nodes with h-1 may suffer from the collision of the requests. So only the nodes with hop number h-1 listen to the request slot. If the node receives a jammed signal in this slot, it means there is a collision on the slot request. The nodes that detect a collision in the request slot send a signal in the second slot which is the collision report slot. If the node can get a clear signal in the request slot, it does not send any signal. The nodes in the hop number h listen to the second slot. If a node has sent a request and if it does not receive any collision report in the second slot, it can get a valid slot. In the third slot, which is the confirmation slot, the node which can get a valid slot sends a signal.
If a node with hop number h-1 receives a signal in the third slot, it means there is a node that gets the current slot. If a node with hop number h receives a signal in the third slot, it cannot give the current slot to another node. In this case, all the h hop numbered neighbors of less than h hop numbered nodes that receive a confirmation signal in the third slot send an acknowledgment in the fourth slot. The receivers of the acknowledgment signal stop requesting for the current slot. It increases the contention performance of ft_DTSM. The flow diagram of the signal exchange structure is illustrated in Fig. 3. It is assumed that the hop number of Node A and Node B is h, the hop number of Node C is h-1, and these nodes can hear each other.
At the end of this signal exchange some nodes can get valid slots. The nodes that cannot have a valid slot try to get one in the next reservation cycles. Reservation cycles are repeated for a certain number of times in a reservation slot. If a node cannot get a valid slot in a reservation slot, it continues to compete in the reservation cycles of the next reservation slot.
At the beginning of signal exchange, every node sends a request signal with a certain probability. Ideally, it is 1/Nc, where Nc is the number of the contender nodes in a one hop neighborhood. However, after each reservation cycle, Nc changes and the sensor nodes cannot calculate the exact Nc number. Nc must be forecasted precisely. If Nc is forecasted larger than it is, the contention probability will be lower than it should be and the slot assignment algorithm may take longer than it is needed. If Nc is forecasted smaller than it is, the contention probability becomes larger than it should be. Nc is updated at the end of each reservation cycle. The updated strategy for slot request probability is similar to FPRP [18]. FPRP is also adopted from Rivest's pseudo-Baynesian Broadcasting Algorithm [21], which is designed for the distributed single hop ALOHA broadcast network.
According to ft_DTSM strategy, after each reservation cycle, a node can be in one of four different states: idle state, collision state, success in one hop, success in two hops. If a node cannot receive or send any signal in a reservation cycle, it is in the idle state. If nothing happens, in other words, if the reservation cycle is idle, Nc should be decreased to increase the contention probability. If a node sends a request in the first slot and if it gets a collision report in the second slot, it is a collision. If there is a collision, Nc must be increased to decrease collision probability. If a node sends a request and does not receive a collision report in the second slot, it is a success for itself. It gets a valid slot and it does not contend anymore.
The pseudocode of the updating slot request probability algorithm is presented in Fig. 4.

Pseudo code for slot request probability update.
If a node senses a successful slot assignment within one hop or two hops, it stops contention in the current reservation cycle but will contend in the next one. In order to be able to predict the number of contenders for the next reservation cycle, a node needs to keep two estimates: one for the number of nodes that contend within two hops, Nc; the other for the number of nodes within two hops which need reservations, but cannot contend in the current slot due to a nearby success, Nb. The effect of a success on its neighbors is modeled as follows: for a node one hop away from the success, a portion (R1) of its neighboring contenders cease to contend in the current slot; for a node two hops away, this ratio is R2.
One of the most important design issues for military wireless sensor networks is delay. Reducing delay is possible with the help of assigning time slots carefully. The rule is that smaller hop numbered nodes should get higher slot numbers.
An example is presented in Fig. 5. Let us assume that the nodes in Fig. 5 are one hop away from its consecutives. In this particular network, the time frame has 30 time slots and there are 3 sub slots. In this case, the first sub slot is from 21 to 29th slots, the second is from 11 to 20th slots, and the third one is from 2 to 10th.
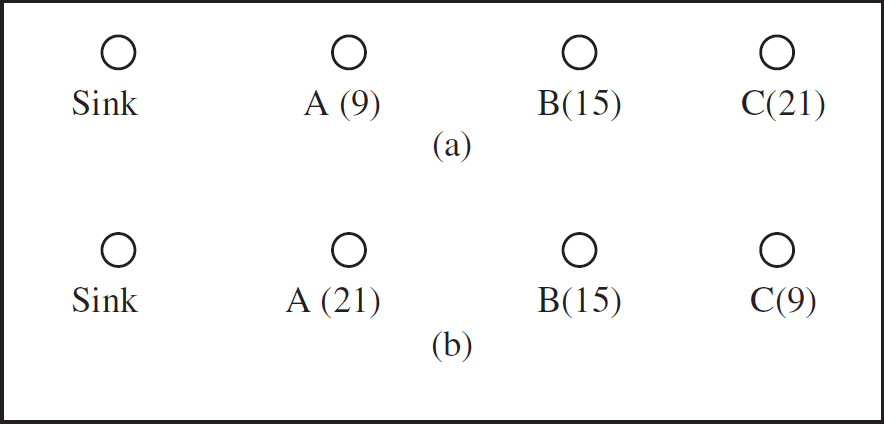
Example network and time slots (a) A regular slot assignment. (b) ft_DTSM.
The first slot is reserved for the sink. Figure 5a is an example of a slot assignment. Figure 5b is a slot assignment based on ft_DTSM. The relay of an event from C to the sink takes 70 time slots for a sensor network in Fig. 5a. However, it takes only 21 time slots for the network in Fig. 5b. In order to reduce delay, the time frame is divided into u sub time frames. If the whole time frame has s slots, a sub time frame has s/u slots. The slot number assigned to a node with the hop number h, must be in (u-((h-1) mod u)) th sub time frame. In this way, the slot numbers of the consecutive hop numbered nodes belong to consecutive sub time frames. The sensor node can get the number of sub time frames, u, from the sink's synchronization signal and calculate its sub frame number.
DISM is another mechanism which is used to decrease energy consumption [15]. In a tree based TDMA WSN, parents must listen to their children to check whether the children have data or not. If the children have no data, it causes overhearing and energy waste.
According to DISM, one special slot is reserved for data indication. When a sensor node senses an event or when it has data to send, it sends a signal in the data indicator slot (DIS). Every node listens to its data indicator slot. If a node does not receive a signal, it does not check its children. If a node receives a signal at the DIS, it means there is at least one neighbor node that has data. A sensor node that gets a signal in the data indicator slot listens to the slots of its children. Although it can not eliminate the entire overhearing problem, it reduces most of the redundant checks.
Performance Results
Performance of MILMON is investigated in three domains: energy consumption, delay, and fault tolerance. The system parameters are presented in Table 1. All power consumption parameters are compatible with Berkeley's Motes [22]. The performance results are investigated for a tree-based WSN topology.
System parameters

System parameters
In a circle-shaped area with a diameter 40 unit, the sensor nodes are deployed randomly. The sink is placed at the center of the circle. Each sensor node has the same transmission range which is 1.5 unit. The sensor nodes construct a tree topology. A child connects to the closest candidate parents. In all simulations, the topology is the same.
The MILMON system can be expressed in terms of tasks, as in [23]. The task generated in an analytic model and a simulation model is different. In the analytic model, the tasks are generated in the children, according to the Poisson process. The parent listens to the data indicator slot (DIS) to check its children for new tasks. If the parent senses a new task, it receives the tasks from its children. After receiving the task, it relays it to its parent. On the other hand, in the simulation model, an intruder-based task generation is used. When an intruder comes into the sensing coverage area of a sensor node, a task is created for that particular node. The sensing coverage area is modeled as a binary detector. If the intruder is in the sensing range of a node, it is sensed and the task is created. If the intruder is not in the sensing range of the sensor node, it cannot detect the intruder. According to DISM, when a sensor node has a task to relay, it sends a signal at the data indicator slot (DIS). The parent checks its data indicator slot for a new task. If the parent can get a signal in DIS, it listens to their children to receive the task in its children. In this way, the tasks can be relayed to the sink. The intruder comes into the system with the Poisson process. The tasks created by the intruders are injected into the simulator in each second. In addition to the tasks created by the intruders, there are some additional tasks, like the synchronization beacon task. Each beacon of the sink is also modeled as a task. This task is created for all the sensor nodes and it is created in the first slot in the data frame. The synchronization task has higher priority than the other tasks.
Discrete time simulation technique which is very suitable for TDMA based systems is used. One time unit for the simulation of ft_DTSM is one tiny time slot used for the signal exchange. The time unit for the network operation is one time slot for data relay.
The dominant factor in energy consumption is sourced from radio circuits in WSN. Radio circuit energy consumption of MILMON is compared with SyncWUF, D-MAC, and FLAMA. SyncWUF is an enhanced version of WiseMAC, which is one of the most energy saving MAC layer for wireless sensor networks, for low WSN traffic requirements. SyncWUF consumes up to 100 times less energy than S-MAC and T-MAC which are the most known WSN MAC layers [11]. D-MAC is a WSN system developed to reduce energy consumption and delay. In D-MAC, each node uses contention periods which are arranged to minimize delay. FLAMA, a TDMA-based WSN architecture, relays its data in scheduled access slots. However, it distributes time slots in contention-based periods.
The energy consumption of different WSNs is investigated with both the analytic model and the simulation model [23].
Analytic Model
The analytic model is constructed for the energy consumption of a sensor node's radio circuit. In a tree-based network, each node has a certain number of children and one parent. In the following analytic models, there are two ways to send data to its parent. A sensor node relays data from its children to its parent or a sensor node senses the environment and if it produces data, it forwards it to its parent. The system load of the model is defined as the average number of relaying packets in one second.
In the newly proposed system, when a node sends data to its parent, the main energy consumption sources are as follows:
Time synchronization, Sending DISM signal, Controlling DISM signal by the parent, Sending and receiving data, Overhearing data indicator slot.
If the sink can cover the entire network, in hr-FTSP, every node must receive one synchronization packet in a synchronization period. When the synchronization period is 60 seconds and a synchronization packet has 8 bytes, hr-FTSP consumes 64Rr/60 watt. In MILMON, a sensor node sends the DISM signal, if it has data. If L is the system load, the energy consumption for sending DISM is RsSdism/L watt. L parameter is called system load. A sensor node controls its data indicator slot at the beginning of each data frame. If a node listens to the medium for one bit for controlling the data indicator slot, it consumes Rr/Tw watt. Energy consumption for relaying data from the children to the parent can be represented as (RrSd+ RsSd)/L.
If there are Np nodes that listen to the same DISM signal, they have to check their children. The nodes that overhear a DISM signal listen to their children's slot for only the preamble interval. If it is assumed that a sensor node has Nc children node, Np nodes checks their children Nc times on the average. The overhearing energy consumption can be computed as RrNpNcSpr/L.
Power consumption of MILMON for one hop is as follows:

While the entire DISM signal must be sent, to receive only one bit is enough to control the existence of the DISM signal. The second and the third terms are used for controlling and sending the DISM signal, respectively. The fourth term is added for relaying data from one node to another. The last term is for overhearing nodes.
FLAMA is also a TDMA-based WSN. Every node calculates a random number and the node with the maximum number within a two-hop neighborhood can send data. On the other hand, the FLAMA node controls all its children for all time frames. If it is assumed that the preamble interval of FLAMA is equal to the preamble interval of MILMON, the energy consumption of FLAMA is as follows:

The first term of Eq. (2) is for the preamble interval and the second term is the energy consumed for relaying data from one node to another. It must be noticed that FLAMA has random access based periods for neighbor discovery, topology construction, and time synchronization. The energy cost of random access periods is not included in Eq. (2). PFLAMA gives a lower bound for FLAMA energy consumption.
D-MAC receives and sends data in its data slots. It has to listen to the entire receive slot. It also needs global synchronization and it runs a time synchronization algorithm. In [10], a two way handshaking based synchronization method is used for D-MAC. However, hr-FTSP consumes much less energy than the synchronization methods based on two-way handshaking. For a fair comparison, D-MAC is assumed to use hr-FTSP WSN time synchronization methods. D-MAC energy consumption is as follows:

The first term is for hr-FTSP, the second is for receiving the data slot, and the last one is for data relay, if there is data to relay. D-MAC listens to the data slot even if there is no data. As the analytic model of SyncWUF, the model developed in [12] is used.
Figure 6 shows the energy consumption comparisons of our system, SyncWUF, FLAMA, and D-MAC. Energy consumption performance is investigated for different number of children and different system loads. Energy consumption performances of D-MAC and SyncWUF do not change with the number of children. Only FLAMA and our system are affected by the number of children. Energy consumption of FLAMA dramatically increases with the number of children, especially for a low system load. However, the effect of the number of children is limited for FLAMA in higher system loads. On the contrary, while the energy consumption of our system has a very small change for low system load, the change in a higher system load is considerable. If the system load is 1, and if there is only one child, the energy consumption is 60.39 mw. However, if the number of children is 4, it increases to 78.25 μw.

Energy consumption for different number of children.
For any number of children, MILMON consumes less energy than D-MAC and FLAMA, for low system loads. Only SyncWUF can save more energy, if the system load is very low. The energy consumption difference between SyncWUF and MILMON is realized as 1.8 times for very low system loads. If the system load is higher, the energy consumption of SyncWUF increases and exceeds not only MILMON, but also FLAMA. MILMON consumes less energy than FLAMA and D-MAC for moderate and low system loads.
The difference is much more remarkable for lower system loads and a higher number of children. MILMON can save 4.4 times more energy than FLAMA. However, MILMON consumes the most energy, if the system load is high. When the system load is 1, its energy consumption exceeds D-MAC, FLAMA, and SyncWUF.
The analytic model is developed to calculate energy consumption for one hop and the data traffic used in the analytic model is the incoming data packets to a sensor node. However, the energy consumption should be compared to the energy consumption of the whole network under realistic data traffic generated by sample intruders. A simulator is developed to model energy consumption of different systems under realistic data traffic.
System load definition of the simulation model is different from the system load of the analytic model. While the system load in the analytic model is the number of packets per second, the system load in the simulation model is the number of intruders per second. The intruder comes into the system from a random border point of the network area and moves linearly. The speed of the intruder may vary between 3 km/hr which is the speed of a walking man and 100 km/h which is the speed of a highly mobile vehicle. The network area is modeled as a circle and the sink is at the center of the network area. The network topology is assumed as a tree structure as in the analytic model.
The average energy consumption of FLAMA, SyncWUF, D-MAC, and MILMON is presented in Fig. 7. The results of the simulation model are compatible with the results of the analytic model. For all cases, D-MAC is the most energy consuming WSN system. The energy consumption difference between D-MAC and the other WSN systems is much higher in low system loads. When the system load gets higher, the energy consumption difference becomes closer.
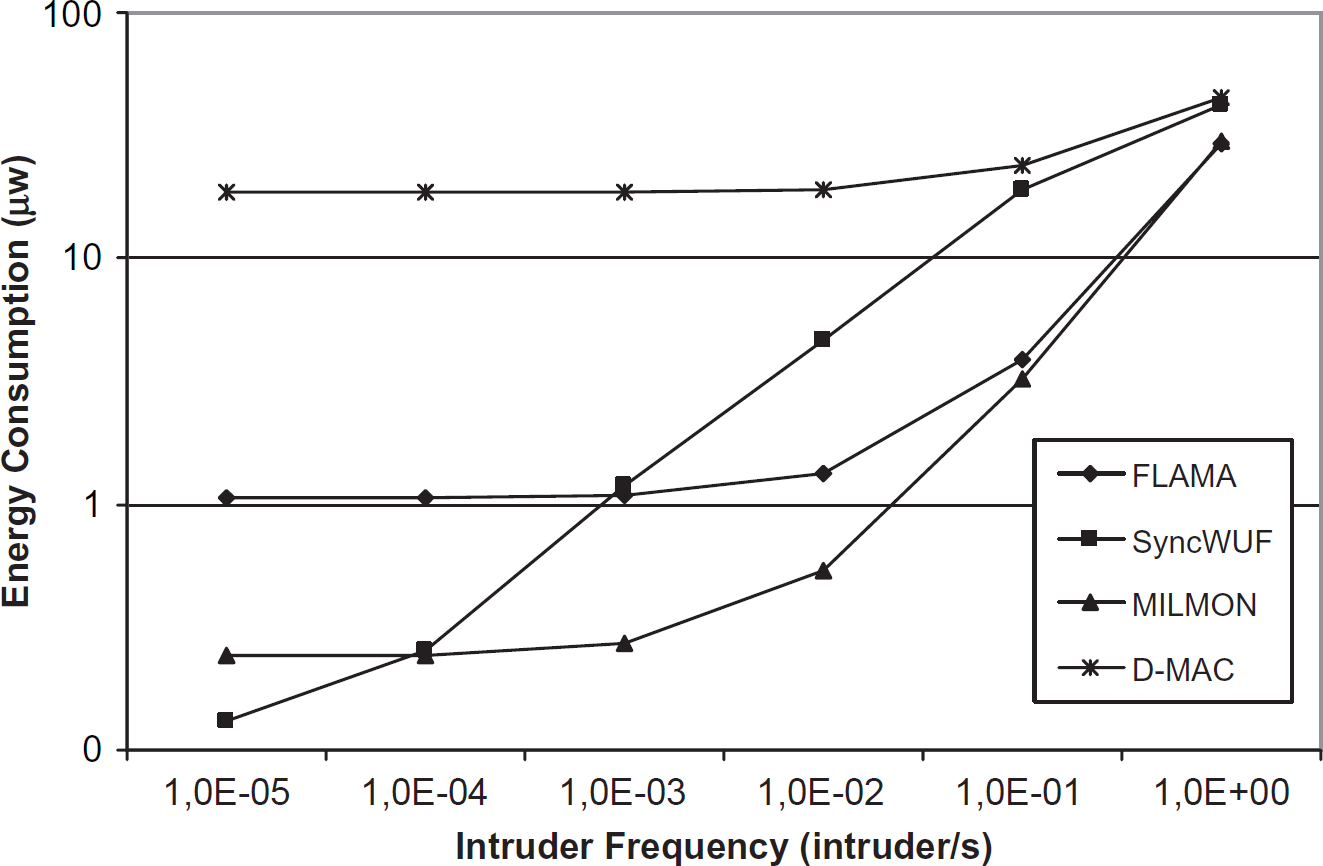
Average energy consumption in simulation model.
If the arrival of an intruder is very unlikely, SyncWUF is the most energy saving system. When the system load is higher, the energy consumption of SyncWUF also increases, so that it consumes more energy than FLAMA and MILMON. While SyncWUF consumes approximately 1.8 times less energy than MILMON for very low system load, the energy consumption of SyncWUF is 2.3 times higher than MILMON for high system loads.
FLAMA is another system that is modeled in simulation. FLAMA consumes more energy than SyncWUF and MILMON for low system loads. The energy consumption difference between FLAMA and MILMON is up to 4.3 times for the low system loads. If the system load is higher, the difference becomes closer, so that when the system load is 1, there is no important difference between the energy consumptions of FLAMA and MILMON.
Sensor nodes are prone to failures and wireless sensor networks should be able to operate against a single point of failure. If a sensor node dies, the other should be able to continue with a little or no additional recovery procedure. We have developed a fault tolerance metric to compare the fault tolerance performances of different systems. Fault tolerance is the percentage of continuing sensor nodes, after a certain percentage of sensor nodes have died. For example if all the nodes can continue, after 10% sensor nodes have died, its fault tolerance for 10% is 100. If only 80% of the remaining nodes can operate, after 10% of the sensor nodes have died its fault tolerance for 10% is 80.
If all alternative parents of a certain node die, it can not send the data and children cannot function. More alternative parents result in more fault tolerant network. ft_DTSM aims to increase the number of alternative parents to produce more fault tolerant network. Figure 8 shows the comparison of fault tolerance performances.

Fault tolerance of different systems.
WSN systems without a fault tolerance mechanism, like FLAMA, cannot survive, even after a few number of faulty sensor nodes. When the faulty node ratio is 25%, only half of the FLAMA nodes can continue to run. If the fault node ratio is about 35%, there is almost no connected node in the network.
The fault tolerance comparison shows that the fault tolerance mechanism achieves to increase reliability of the network. When the fault tolerance parameter is higher, the system becomes more fault tolerant. When it is 3, the sensor node losses are very low, even if half of the nodes have died. However, if the fault tolerance parameter is higher than 3, it has no considerable additional contribution.
Energy consumption or fault tolerance is not the only design consideration of our system. Delay is also very important for military applications. Figure 9 shows the delay performances of FLAMA, D-MAC, SyncWUF, and our system with different fault tolerance parameters.
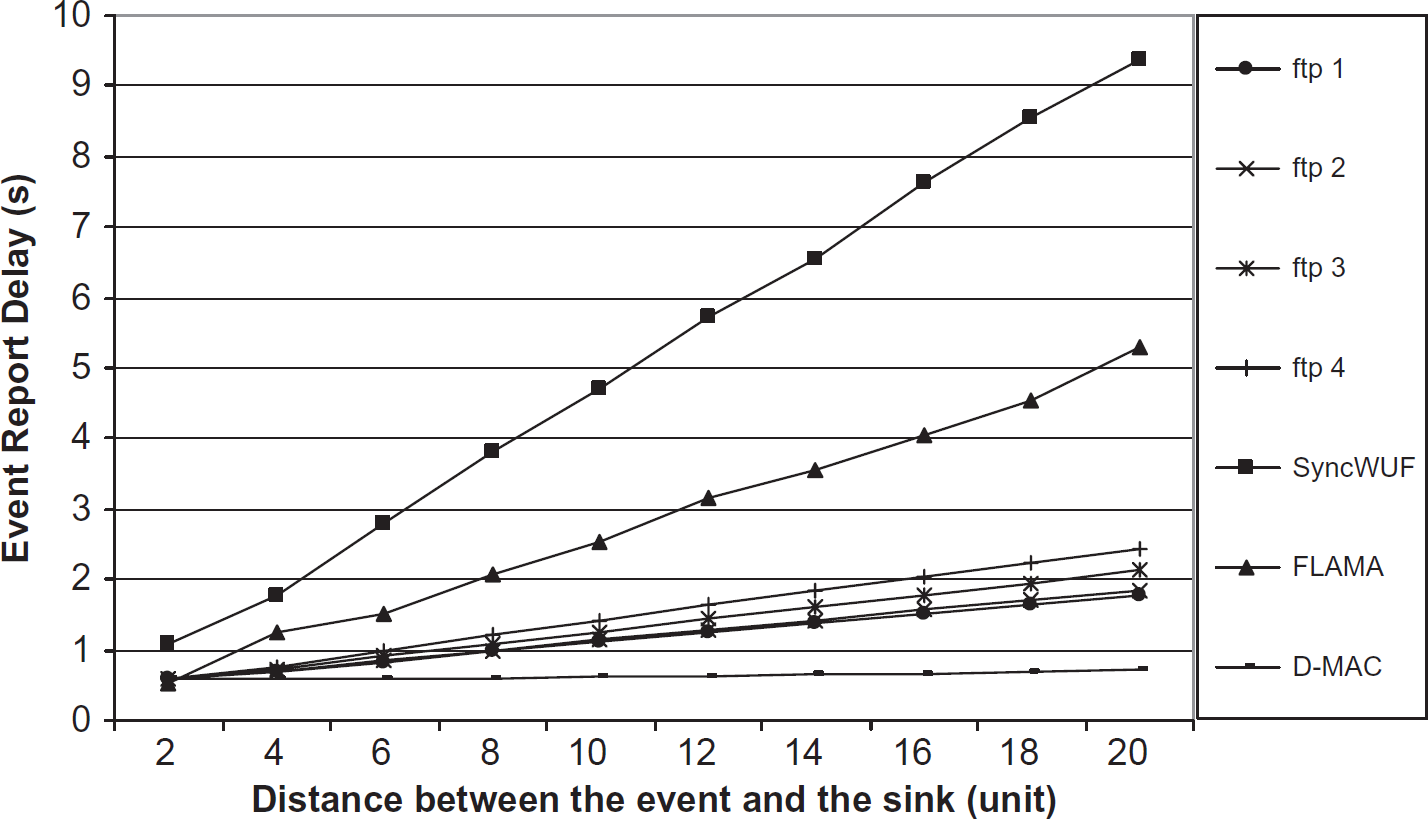
Delay performance of different systems.
The fault tolerance parameter, ftp, affects the delay performance. When the parameter is 1, the delay is around 1800 ms. If the fault tolerance parameter is 4, the delay increases approximately 1.7 times. It is shown that when ftp is 3, the network is more fault tolerant and if it is higher than 3, there is no additional contribution. For the delay performance comparisons between MILMON and the existing systems, ftp is assumed as 3.
SyncWUF delay is much higher than our system. The delay performance difference between MILMON and SyncWUF increases up to 5.8 times, when the distance between event and the sink is high.
Figure 9 shows that although the delay performance of MILMON is much better than the delay performance of SyncWUF and FLAMA, the delay performance of D-MAC is the best among the existing designs. D-MAC performs its data traffic in contention based periods and it arranges the periods according to the hop numbers of the nodes. In D-MAC, data can be relayed to the next hop immediately, if there is no collision, which is unlikely to occur in low system load.
MILMON is compared with SyncWUF, D-MAC, and FLAMA. Our system performs better than SyncWUF in delay and energy consumption. SyncWUF consumes less energy than our system, only if the system load is very low. When MILMON is compared with D-MAC, MILMON consumes much lower energy than D-MAC. However, the delay performance of D-MAC is better than the delay performance of MILMON for all cases. Although FLAMA can produce lower delay than SyncWUF, MILMON is still better than FLAMA in terms of delay. The energy consumption of MILMON is also better than FLAMA, especially when the system load is low. On the other hand MILMON has limitations on fault tolerance.
Design objectives of our system are to maximize the fault tolerance and to minimize delay and energy consumption. When the performance comparisons are investigated, there is no WSN system that can perform as the best for delay, energy consumption, and fault tolerance at the same time. In order to compare our system, SyncWUF and FLAMA; a combined metric is proposed. The new metric is fault tolerance/(delay∗energy consumption).
The importance of energy consumption, delay, and fault tolerance may vary from application to application. While fault tolerance is more important for a particular WSN application, the energy consumption is the most important design consideration for another WSN application. Although this new metric does not explain all cases, it is proposed to demonstrate that MILMON can find a balanced solution for energy efficient, delay sensitive, fault tolerant WSNs. In this case, we assume that these design considerations are equally important.
The fault tolerance performance is accepted as the remaining sensor node percentage, if 30% of the sensor nodes is faulty. The fault tolerance parameter is assumed as 3. SyncWUF and D-MAC are assumed as perfectly fault tolerant. In other words, the fault tolerance performances of SyncWUF and D-MAC are assumed as 100. The delay performance is the delay between the outermost region to the sink. Energy consumption performance is investigated with different intruder frequencies. In Fig. 10, combined metric performances are presented.
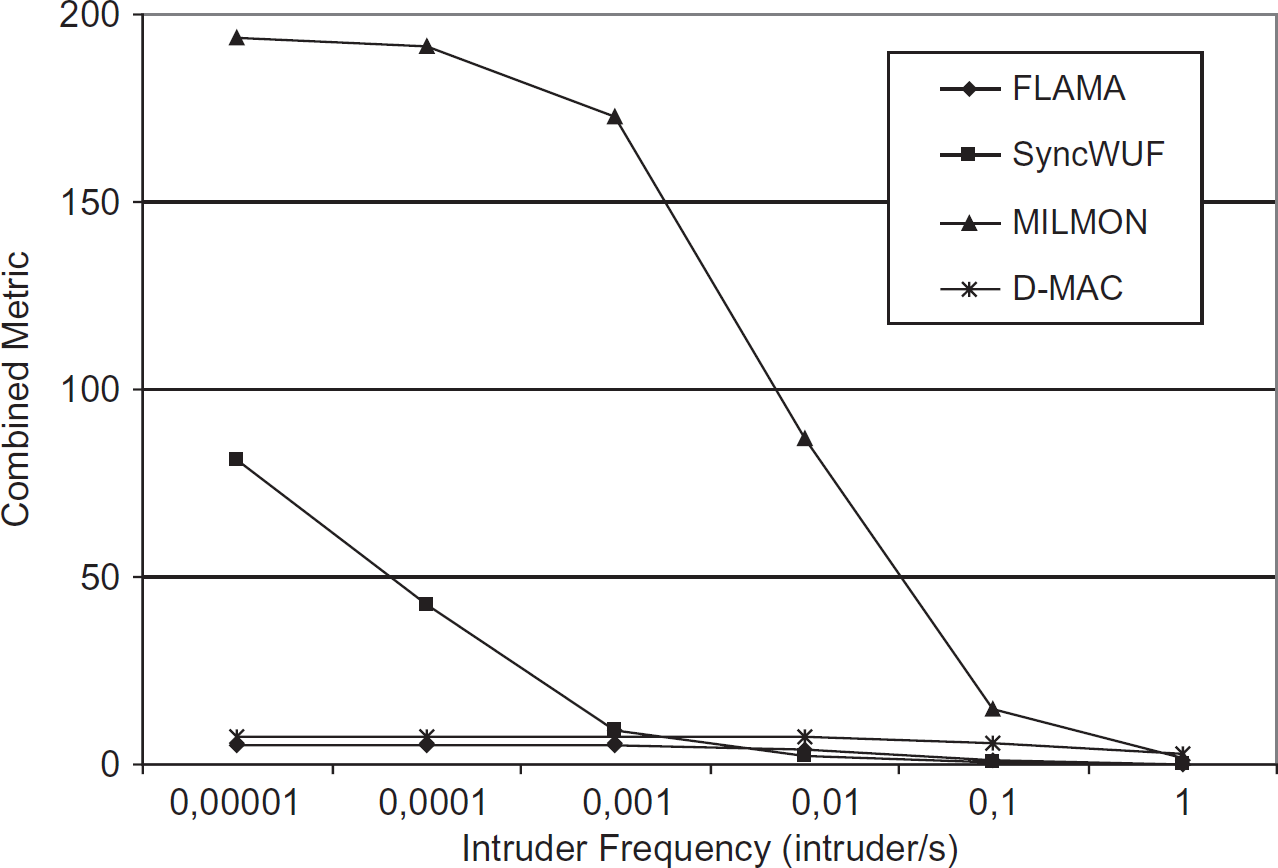
Performances of different systems for combined metrics.
When the system load is high, the combined performances of different WSN systems are very close. When the system load gets lower, our system performs much better than the existing WSN systems. Although SyncWUF performs better than FLAMA and D-MAC, when the system load is lower than 0.001; our system always outperforms the existing systems.
In this article, a new TDMA-based wireless sensor network for military monitoring, MILMON, is proposed. Design objectives of the new system are energy efficiency, delay, fault tolerance, and scalability.
There are three main components of MILMON. These are Synchronization with A High Range Transmitter (hr-FTSP), Data Indicator Slot Mechanism (DISM), and Fault Tolerant Distributed Time Slot Assignment Algorithm (ft_DTSM). hr-FTSP which is based on the sink with a high range transmitter is proposed to minimize the energy consumption. Data indicator slot mechanism (DISM) helps to reduce the energy consumption. ft_DTSM is also proposed for the new military monitoring system. ft_DTSM uses tiny time slots instead of contention based periods. It has delay handling and a fault tolerance mechanism.
The energy consumption performance of MILMON is investigated by the help of analytic and simulation models. Analytic and simulation models have shown that the energy consumption of MILMON is superior to SyncWUF, D-MAC, and FLAMA for lower system loads. However, if the system load is lower than a certain point, SyncWUF can save more energy than MILMON. The delay performance of MILMON is compared to D-MAC, SyncWUF, and FLAMA. While our system can produce up to 6 times lower delay than SyncWUF and FLAMA, D-MAC can produce lower delay than our system. MILMON is very sensible against faulty nodes. Fortunately, it has a fault tolerance mechanism to produce a more reliable network. The fault tolerant slot assignment mechanism can improve fault tolerance of our system. While SyncWUF can save more energy than our system for low system loads, MILMON can produce much lower delay than SyncWUF. D-MAC can reduce delay more effectively than MILMON, but MILMON can save much more energy than D-MAC. Although there are WSN systems that perform better than our system for only energy consumption or for only delay, MILMON realizes a balance on energy, delay, and fault tolerance.