
Abstract
Due to the resource limitation and low performance of sensor node, research works of multi-target tracking became a hot spot in the applications of wireless sensor networks. Here, we propose an algorithm named augmented state-based multi-target tracking algorithm. To augment the state of the target tracking, augmented state-based multi-target tracking algorithm can effectively reduce the computational complexity of data association. Then, multi-target tracking in wireless sensor networks can be implemented by augmented state-based multi-target tracking algorithm as a simplified Bayesian estimation method is adopted. The simulation of multi-target tracking in wireless sensor networks demonstrates that augmented state-based multi-target tracking algorithm has less computation and higher accuracy than traditional method, especially in the implementation of maneuvering targets with intersection.
Introduction
The fast development of micro-electro-mechanical systems (MEMS), wireless communication, and electronic technology lead to the invention of wireless sensor networks (WSNs), 1 which are cheap, low power consuming, multi-function, tiny in volume, and able to communicate in short distance. The emerging technology of WSNs provides many exciting and interesting applications such as target monitoring, 2 blue-green algae detection, 3 and intelligent traffic system. 4
The ability to track targets in WSN is essential in many applications. Tracking in WSN has gained popularity for several major reasons: (1) as the sensor node hardware is usually cheap and wireless radio module is also available, WSN can be easily deployed in interesting area in large scale. (2) In WSN applications, sensor nodes are commonly densely deployed, so WSN applications can be fault-tolerant, robust, and resist to partly damage. (3) By multi-dimension, multi-scale information fusion among measurements provided by sensors around target, signal-to-noise ratio (SNR) can be effectively improved.
But due to the limitations in resource, power, sensing capability, communication, memory, and computational capability, it is really a challenge to implement traditional target track solutions in WSN applications. As any of the operations of data collection, processing, and dissemination leads to an increase in the resource consumption, the target tracking algorithms in WSN should effectively utilize resource and also reduce the computational complexity. Single target tracking has been well studied in the works by Zhao et al., 5 Bruno and Dias, 6 Zhou et al., 7 Chen et al., 8 Pattem et al., 9 and Zhou et al. 10 But the multi-target tracking (MTT) problem remains one of the major problems yet to be addressed in the sector.
In this article, we focus on MTT problem in resource-constrained sensor networks and develop a new algorithm, named augmented state-based multi-target tracking (ASMT) algorithm, to address MTT problem in WSNs. Compared with other typical algorithms, such as in the work by Ceylan et al., 11 ASMT can provide impressive improvement in performance with its low-cost hardware. And it is more efficient in terms of communication overheads and computation efforts.
MTT in WSNs
The history of MTT study is more than 40 years. 12 Barshalom, 13 Reid, 14 Subedi et al., 15 and Milan et al. 16 greatly promoted the study of MTT. Technology of traditional MTT is now well developed. However, in the background of WSN, due to the difference of sensing model and the limitation in computing, energy, and communication resource, there is a remarkable difference between WSN MTT technology and traditional MTT technology.
In the study of traditional MTT, sensor nodes are always supposed to be radar nodes, infrared nodes, or image nodes. All the nodes mentioned above are strong-in-capacity and few-in-quantity. Consequently, the CPU in the node is powerful in data processing, and the normal way of information processing is centralized. While in the WSN MTT application, due to the cheap cost and tiny volume, the sensor nodes are weak-in-capability but large-in-quantity, and the cooperation among multi-nodes is adopted to accomplish target tracking.
Data association is the most difficult problem in MTT. We first consider the simple case of tracking two targets as shown in Figure 1. There are three stages in the WSN MTT application. In stage 1, the distance between targets is large and the targets can be tracked as single ones, respectively. In stage 2, the targets get close to each other, which always results in a distortion measurement. The distortion measurement may lead to confusion between measurement and target, and data association is required to deal with the distortion. In stage 3, distance between targets gets larger and single target tracking model is then applicable. Error occurred in the stage 2 will lead to confusion or lose of target, and re-initialization or re-identification is then necessary in stage 3.

Data association in WSN.
In the traditional MTT, as measurement is only caused by single target or false alarm, the “data association” is just to assign correct target to correct measurement. 13 While in the WSN MTT, as the sensor node measurement may be caused by multiple targets, solution of MTT here should first decompose the measurement, after that corresponding sub-measurement is assigned to each target and then the correct state estimation can be obtained, which is actually an information fusion process here.
Up to now, there are some research works on WSN MTT presented by Ristic and Arulampalam, 17 Cai et al., 18 Noureldin, 19 and Ong et al. 20 Ristic and Arulampalam 17 used acoustic sensors for multi-object tracking. Sequential Bayesian estimation framework and particle filter are adopted to addressing the problems of MTT in WSN. An improved algorithm for decentralized data fusion (DDF) 20 is suggested for consistent joint localization and tracking of multiple targets in WSNs. DDF operation of division is performed by consistent methods based on importance sampling. To satisfy the special requirements in the issue of WSN MTT, Ceylan et al. 11 proposed an algorithm on WSN MTT in the framework of information driven sensor query (IDSQ). 5 IDSQ means a set of information-based approaches to track individual targets. IDSQ formulates the tracking problem as a more general distributed constrained optimization that maximizes information gain of sensors while minimizing communication and resource usage. Graphical model was used to figure out the association between the target states and the sensor measurements. Target attribute information is used to deal with the distortion among target measurements. This algorithm implemented the distributed computation and localized processing by cooperation among sensor nodes. However, introduction of extra attribute information leads to the rise in hardware complexity and also leads to the increase in cost, computation, communication, and energy consumption. Recently, Leitinger et al. 21 proposes a joint probabilistic data association multipath-assisted indoor navigation and tracking (JPDA-MINT) algorithm that is able to handle difficult situations where data association is ambiguous. The algorithm is based on a recently introduced loopy belief propagation scheme that performs probabilistic data association jointly with agent state estimation and scales well in all relevant systems parameters. Daniyan et al. 22 use the SMC-PHD (sequential Monte Carlo probability hypothesis density) filter to handle the MTT aspect and obtain target state estimates. It models the interaction between target tracks as a game by considering them as players and the set of target state estimates as strategies. Utility functions for the players are defined, and a regret-based learning algorithm with a forgetting factor is used to find the equilibrium of the game. Vermaak et al. 23 present Monte Carlo methods for MTT and data association. The methods are applicable to general non-linear and non-Gaussian models for the target dynamics and measurement likelihood. However, they do not consider the velocity state, and accuracy is not high in the implementation of maneuvering targets with intersection.
In this article, we propose a new approach to solve the data association problem in WSN using not only the location state but also the velocity state. Our contribution of this article is that we propose an augmented state-based data association approach to solve the above problem efficiently and in a distributed way. Compared with some other modeling methods, such as in the work by Ceylan et al., 11 the proposed algorithm has less computation and higher accuracy, especially in the implementation of maneuvering targets with intersection.
MTT model in WSNs
We assume sensor nodes are uniformly distributed in a two-dimensional (2D) map and are grouped into clusters with some sensors as cluster heads. The cluster heads can be elected dynamically. 24 Generally, clustering 25 improves scalability and leads to easy cooperative tracking algorithms. Each sensor has a region of detection with radius R and measures only the strength z(t) of detected targets. The sensor is assumed to sleep and wake up in a fixed period, which is represented as constant ts (in seconds).
Bayesian estimation for tracking
Target tracking can be modeled as a problem of dynamic state estimation. A well-established solution for problem of dynamic state estimation is the framework provided by Bayesian methods. Suppose that the state model is xk = fk(xk − 1, nk − 1), where xk is the target state and nk − 1 is the process noise. At the same time, the measurement model is zk = hk(xk, wk), where wk is measurement noise. Then, the Bayesian method can estimate the probability density function (PDF) of xk: p(xk|z1:k) based on the measurements z1:k = {z1, z2, …, zk}.
Suppose that PDF at time instant k − 1

Target movement model
If the movement model of target is built correctly, it will simplify the estimation of target location. In the application of WSN MTT, the model of target movement is usually uncertain and unstable, and the computing resource is limited. So, Brownian motion is often chosen as the model of target movement. Although the Brownian motion model well accommodates many target motion patterns, the model ambiguity decreases tracking accuracy.
Actually, in the WSN MTT application, the change in target movement is much smaller than the sampling rate of sensor node (sampling rate of MICAz can exceed 100 Hz or more, and MICAz is a WSN mote developed by Crossbow Technology). The device is built upon the IEEE 802.15.4 standard. It is one of the most commonly used mote systems in the world, so the constant velocity (CV) model can be applied in the sampling interval. Therefore, we can build the target movement model as follows.
Where

where ts means sampling interval and equals the reciprocal of the sampling frequency. For example, in this article, the sampling frequency of MICAz can exceed 100 Hz, and ts in equation (2) is 0.01 s and less than 1.
Sensing models
In WSN, three types of sensors were introduced in the work by Sheng and Hu: 26 time delay of arrival (TDOA), direction of arrival (DOA), and strength-receiving sensor. TDOA sensor is designed for localization according to the time delay of measurement between sensors and is a type of sensor that requires high-quality hardware. DOA sensor is designed to obtain angle-related information by sensing the change in phase, and this type of sensor works only if the acoustic source emits a coherent, narrow-band signal. Strength-receiving sensor estimates the location of target by the signal strength it received from the target and required accuracy may be obtained if the cooperation among nodes is applied. The strength-receiving sensor is also the most commonly used sensor in WSN applications. In this article, we will proceed with the model of strength-receiving sensor.
Let k be the number of signal source, and the signal strength received by node i at time t is

where εi(t) is the background noise, it is commonly set as the Gaussian noise with the mean zero and variance

where
By equations (3) and (4) we can come to the following conclusions. First, this type of sensor estimates the state by the strength of signal it received. Generally, the SNR decreases as the distance between the sensor node and target increases, so the effective probing range can be determined according to the SNR. Second, this type of sensor may obtain incomplete data, by which we cannot exactly determine the state of object alone. We assume that the transmission of signal source is homogeneous in all directions, and then, the signal strength received by sensor node is decided only by the distance between signal source and sensor node while not directly decided by the location vector of signal source. Third, the measurement of sensor node is decided by all the signal sources in the effective probing radius, and all the objects in the effective range contribute to the measurement. Fourth, as to any target k, all the other targets will be considered as noise. So, performance of tracking without the appropriate data association will be greatly impacted as one or more targets getting close to target k.
The aforementioned four conclusions apparently differ from traditional tracking sensors, such as radar, infrared, and image sensors, used in the traditional tracking system. The most important difference is that the measurement of one sensor in the traditional applications is only affected by single target though several targets moving in the effective probing range. While in WSN MTT, measurements of sensor nodes are affected by all the targets in the effective probing range, which makes WSN MTT much different from the traditional MTT.
To describe the aforementioned sensing model, we give an example. In Figure 2, 27 the effective probing range can be determined by SNR, which is shown by circular dotted line in the left figure, and seven sensors are indicated by squares. According to the figure, target A is in the effective probing range of nodes 1, 2, and 3 and target B is in the effective probing range of nodes 2, 3, and 4, while target C is only in the effective probing range of node 6. The measurements of the seven sensor nodes are shown in the right figure, and x is the target states and z is the measurement.

Sensing models in WSN: (a) the scene of multi-target tracking with sensor networks and (b) shows that in the case of multi-target tracking, the measurement value of one sensor node may be derived from multiple targets. 27
According to this figure, measurements of sensors 2 and 3 are affected by both A and B, which means
ASMT algorithm
Assume that the WSN consists of m randomly scattered sensor nodes. N targets locate in the effective probing range of node i. The augmented vector of target k at time t is expressed as follows:
Assume that ts is the sample interval, and the discrete-time equation of state is computed as follows

where
According to equations (3) and (4), the measurement

It is known that state distribution of k at time t − 1 is

where ψ(t − 1) is all the possible value space of
Then, prediction of measurement distribution can be figured out as follows

where
According to the measurement formula (6), measurement of node i consists of N targets; then, the posterior probability of target k in node i can be figured out as follows

where RN − 1 is all the possible value space of z except zk
Assume that m sensors joined the state estimation of target k at time t, and we suppose that all the measurements of sensors are independent from each other, and the posterior probability distribution of target k can be figured out by Bayesian formula as follows
where
Figure 3 illustrates the diagram of ASMT algorithm. At first, sensor nodes sense the energy from targets. The measurement of a sensor node is probably composed of different targets’ contribution. Then, these useful measurements are sent to cluster head. The cluster head is in charge of the data association based on equation (9) and a Bayesian estimation calculation is operated for target tracking. Furthermore, the result
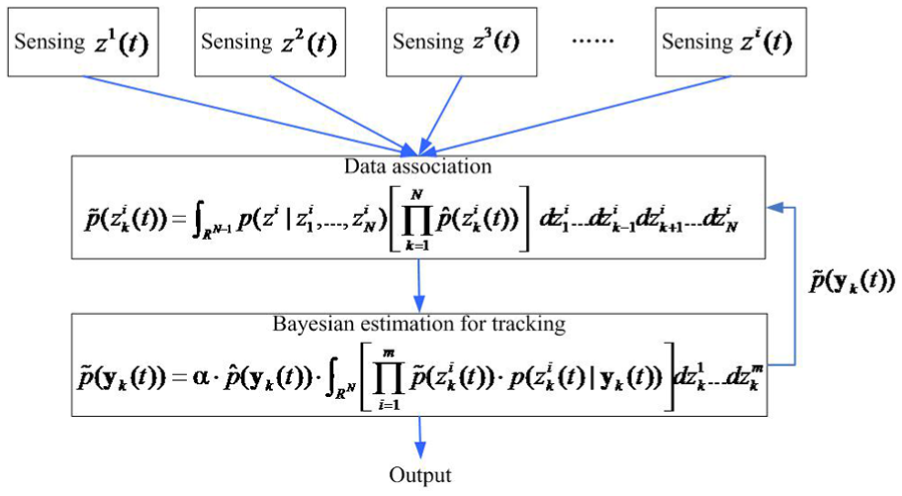
Diagram of ASMT algorithm.
Because WSN has limited resources in real WSN applications, MTT methods with high complexity are not suitable to WSN. While our method takes into account target location, velocity, and sensor materials and has low complexity, it can be practical in real-world WSN applications. In ASMT algorithm, the measurement distortion occurs when targets get close to each other, but if the velocity of each target differed from each other, state prediction will also differ according to equation (7). Then, individual estimation can be obtained by equation (10). In this way, the probability of target loss or confusion is effectively reduced without utilizing other attribute information. While in the case that location and velocity of targets are approximately the same, group tracking may be a better choice. Thus, the environment noise has less inference with our algorithm and it has low computational complexity. While in the traditional multi-tracking algorithm such as JPDA algorithm, when the number of targets and sensors is large and the environment interference is large, the computational complexity will increase dramatically, resulting in a long time for calculation which is unbearable.
Experimental results
To demonstrate the performance of ASMT algorithm (called Our Algorithm), we carried out two groups of simulation and compare them with the performance of algorithms in the work by Ceylan et al.
11
(called Original Algorithm). We set the surveillance area to be a rectangle area of
In the simulation, sensor node of Our Algorithm is only capable of energy probing, which means that strength of probing signal gets weak as the distance between node and source increases, and the measurement model is given by equation (6), and the background noise follows N(0, 0.12). Sensor node in the Original Algorithm is capable of both probing and magnetometer, which is also capable of distinguishing metallic objects. The sensor node in the Original Algorithm has the same mode as in the work by Ceylan et al. 11
In the simulation, two kinds of algorithms only wake up the node within one hop to join the information fusion, and all the parameters and threshold values are set to be same. We choose the filter accuracy and the time of failure (TOF) as the comparative criteria. The filter accuracy is the root-mean-squared error (RMSE) of estimated value and real value. Simulation failure will be determined if RMSE is larger than communication radius in the consecutive two sampling periods.
Monte Carlo simulation is carried out 500 times in each group. The aim of our simulation is to demonstrate the validity of two algorithms and the advantage of the Our Algorithm. The results and analysis of simulations are given in the next part.
Simulation 1
Two objects are in the movement of CV model. Velocity of the nodes is 10 m/s and each round of simulation lasts 30 s. As shown in Figure 4, sensor node is represented by small square; object 1 is metallic, whose track is indicated by thick solid line; object 2 is nonmetal, whose track is indicated by thick dotted line. The thin dotted line and thin solid line in the figure are the filter tracks of two objects’ correct tracking.
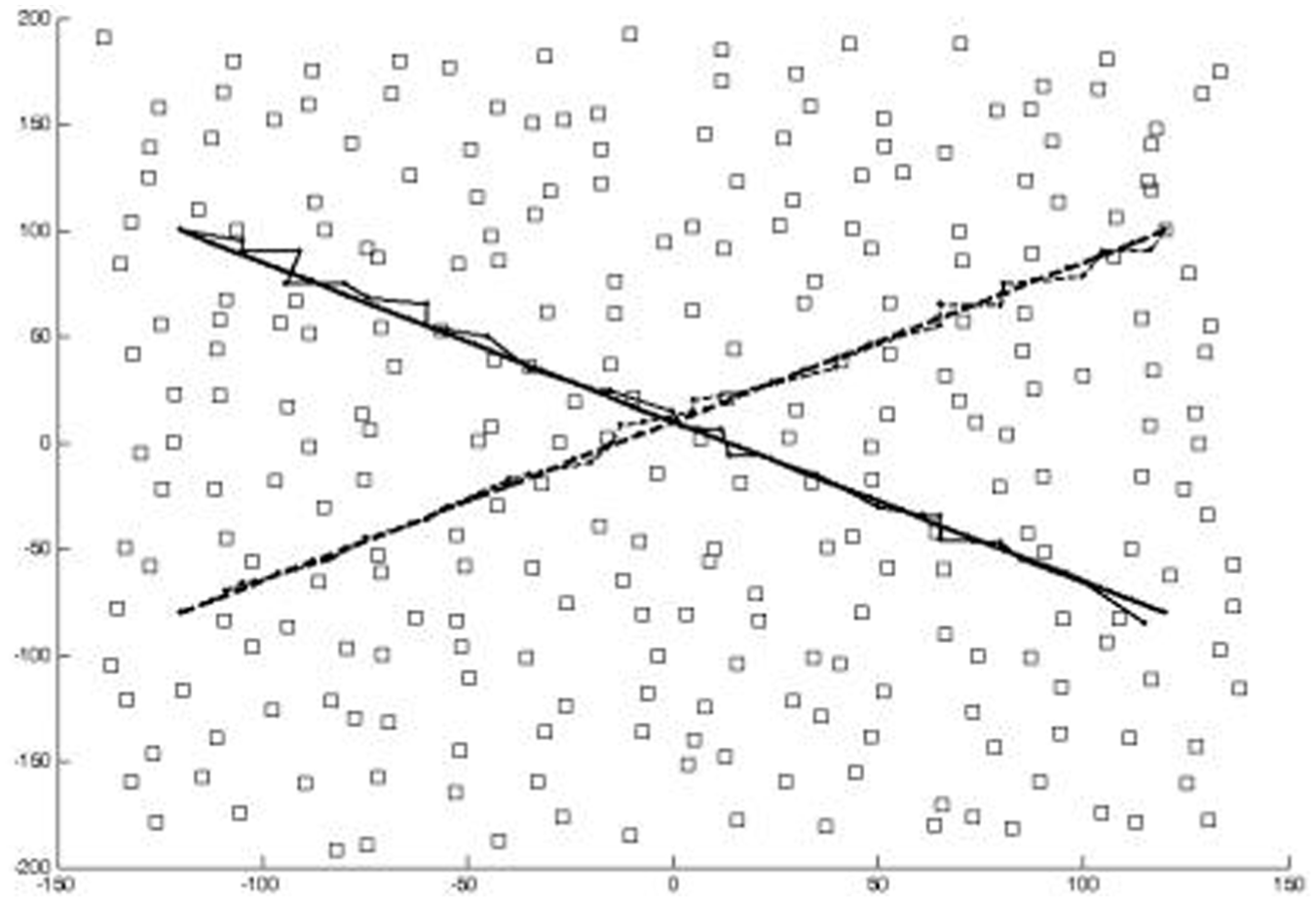
Trajectories of targets with CV motion.
In this simulation, 43 failures occurred with the Original Algorithm and the failure rate is more than 8%. But there was no failure with the Our Algorithm. The RMSEs of the two algorithms are shown in the following figure.
Figure 5 illustrates the RMSEs of two algorithms in CV motion WSN MTT. According to this figure, we conclude that overall difference in tracking accuracy of two algorithms is small, while at the intersection of two objects, the RMSE of object 1 in the Original Algorithm increases drastically, which implies that the Original Algorithm is subject to object intersection.

RMSE of tracking with CV motion.
Simulation 2
Two objects move in circular motion and intersect twice with each other. The linear velocity of objects is approximately 9.4 m/s and each round of simulation lasts 50 s. The same as previous simulation, sensor node is represented by small square; object 1 is metallic, whose track is indicated by thick solid line; object 2 is nonmetal, whose track is indicated by thick dotted line. The thin dotted line and thin solid line in the figure are the filter tracks of two objects’ correct tracking. Figure 6 is the scenario of one correct tracking. Figure 7 is a typical scenario of tracking failure, which obviously showed that failure occurs due to the definite disturbance on object 1 caused by object 2.

Trajectories of correct targets tracking with circular motion.

Trajectories of incorrect targets tracking with circular motion.
The simulation was also carried out 500 times. With the Original Algorithm, 325 failures occurred and the failure rate was 65%. While in the Our Algorithm, only 69 occurred and the failure rate was as low as 14%. The RMSEs of two algorithms in circular motion WSN MTT are displayed in Figure 8.

RMSE of tracking with circular motion.
According to Figure 8, we can conclude that the RMSE of the Our Algorithms greatly outperforms the counterpart of Original Algorithms. At the intersection of two objects, RMSE of the Original Algorithm is two times larger than the counterpart of Our Algorithm, which again verified the conclusion of simulation 1. Besides, simulation 1 is mainly used to compare the performance of the two algorithms under CV model. Simulation 2 changes the motion mode of the target to constant circular motion and cross. To facilitate the simulation, the linear velocity is 9.4 m/s (close to 10 m/s in simulation 1), the simulation time is 50 s, and the target happens to move half a circle. While in Monte Carlo simulation, different velocities and different simulation times have little effect on the performance of the algorithm.
Furthermore, according to simulation 1 and simulation 2, in the Original Algorithm, tracking of metallic object is easily subject to the interference of nonmetal one. The reason for this phenomenon is that the sensing results of magnetic sensor originate from the logical “OR” relation of multiple objects, which leads to the confusion of metallic object measurement. Where the attribute information is not used in the Our Algorithms, the RMSEs of two objects are approximately equal.
Conclusion
This article has discussed the issue of MTT in WSN. Due to the limitations in resource, power, sensing capability, communication, memory, and computational capability, it is really a challenge to implement traditional target track solutions in WSN applications. In this article, an augmented state-based data association approach is proposed to effectively solve the data association problem in WSN using not only the location state but also the velocity state in a distributed way. Compared with some other modeling methods, such as in the work by Ceylan et al., 11 the proposed algorithm has less computation and higher accuracy, especially in the implementation of maneuvering targets with intersection. The simulations demonstrated the validity and advantage of our proposed algorithm.
Footnotes
Academic Editor: Gang Wang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grant no. 61379134.