
Abstract
In this article, an alternative indoor positioning mechanism is proposed considering finite memory structure filter as well as measurement delay. First, a finite memory structure filter with a measurement delay is designed for the indoor positioning mechanism under a weighted least-squares criterion, which utilizes only finite measurements on the most recent window. The proposed finite memory structure filtering–based mechanism gives the filtered estimates for position, velocity, and acceleration of moving target in real time, while removing undesired noisy effects and preserving desired moving positions. Second, the proposed mechanism is shown to have good inherent properties such as unbiasedness, efficiency, time-invariance, deadbeat, and robustness due to the finite memory structure. Third, through discussions about the choice of window length, it is shown that this can be considered as a useful design parameter to make the performance of the proposed mechanism as good as possible. Finally, computer simulations show that the performance of the proposed finite memory structure filtering–based mechanism can outperform the existing infinite memory structure filtering–based mechanism for the abruptly varying acceleration of moving target.
Keywords
Introduction
Recently, indoor positioning systems for wireless sensor network (WSN) have become very popular and thus been used successfully in a variety of scenarios, such as location detection and tracking of products stored in a warehouse, and people within buildings such as hospitals and nursing homes. Because of indoor channel characteristics, accurate estimation mechanism is required for WSN positioning system. In an outdoor environment, the Global Positioning System (GPS) has been used in many outdoor applications for localizing people, cars, and other objects. However, GPS lacks the same level of efficiency when used within indoor environments because of obstacles that can weaken the signal of the GPS. Therefore, to track the positions for indoor systems in WSN, several mechanisms are developed by measuring the distance or range value between the target and anchor sensor as shown in Patwari et al., 1 Liu et al., 2 Bhatti and Xu, 3 and Amundson and Koutsoukos. 4
However, the estimated position can be corrupted by a couple of noises, the measurement noise and the system noise. The measurement noise is caused by inaccuracies in the tracking entity, and the system noise is caused by turbulence or human error and other environmental factors. These noises occur due to multiple factors such as environmental intrusion, inaccuracies in sensor measurements, turbulence affecting the target’s movement, and human inability to navigate in a perfectly straight line. These noises must be filtered out in order to draw a true path of a moving target. Thus, several approaches introduce Kalman filter into WSN systems.5–7 The Kalman filter has been well known as a recursive linear filtering model used to filter random inaccuracies in measurements to predict the most likely position and velocity of a moving target on real-time position coordinate. However, the Kalman filter has an infinite memory structure (IMS) that utilizes all past information accomplished by equaling weighting and has a recursive formulation. When the moving target changes its motion dynamics, the past measurement data have a little information about the current motion. The valid duration of the model might as well be limited to the recently finite time, which is the basic theory of the finite memory structure (FMS) filters.8–13 In addition, due to the IMS, the Kalman filter can tend to accumulate the filtering error as time goes. Thus, the Kalman filter has known to be sensitive and show even divergence phenomenon for temporary modeling uncertainties and round-off errors. Therefore, the FMS filter was applied for indoor positioning in WSN as an early development stage. 14
Moreover, the existing filtering-based mechanisms in Ribeiro et al., 5 Yi and Zhou, 6 and Chen et al., 7 as well as Kim et al., 14 assumed that there is no time delay of measurements. However, since the WSN is unreliable, a measurement delay can often occur. If this is the case, existing IMS filtering–based mechanisms will not be applicable. Of course, to deal with a time delay of measurements in the estimation filtering, several estimation filters have been researched in Basin and Zuniga, 15 Zhang et al., 16 and Lu et al.17,18 However, these estimation filters also have the IMS. Although existing indoor positioning mechanisms adopt these estimation filters in Basin and Zuniga, 15 Zhang et al., 16 and Lu et al.17,18 to deal with a measurement delay, they can still show poor performance and even divergence phenomenon for temporary modeling uncertainties and numerical errors.
Therefore, in this article, an alternative indoor positioning mechanism is proposed considering FMS filter as well as measurement delays. First, an FMS filter for the indoor positioning mechanism is designed under a weighted least-squares criterion that utilizes only finite information on the most recent window. The proposed FMS filtering based mechanism gives the filtered estimates for position and velocity of moving target in real time, while removing undesired noisy effects and preserving desired moving locations. Second, the proposed mechanism is shown to have inherent good properties such as unbiasedness, efficiency, time-invariance, deadbeat, and robustness due to the FMS.
Third, through discussions about the choice of window length, it is shown that this can be considered as useful design parameters to make filtering performance of the proposed mechanism as good as possible. Finally, through extensive computer simulations, it is shown that the performance of the proposed mechanism can be superior to the existing IMS filtering–based mechanism for the abruptly varying acceleration of moving target.
This article is organized as follows. In section ”An FMS filter for indoor positioning in WSN,” an alternative indoor positioning mechanism using the FMS filtering is proposed. In section ”Inherent properties,” inherent good properties of the proposed mechanism are shown. In section ”Computer simulations,” extensive computer simulations are performed to evaluate the performance of the proposed mechanism. Finally, conclusions are made in section ”Concluding remarks.”
An FMS filter for indoor positioning in WSN
For simplicity, only the one-dimensional moving target for the X direction is considered. The moving target’s successive locations for the X direction in WSN can be represented by the discrete-time, third-order, state-space model with sampling time T and measurement delay

where
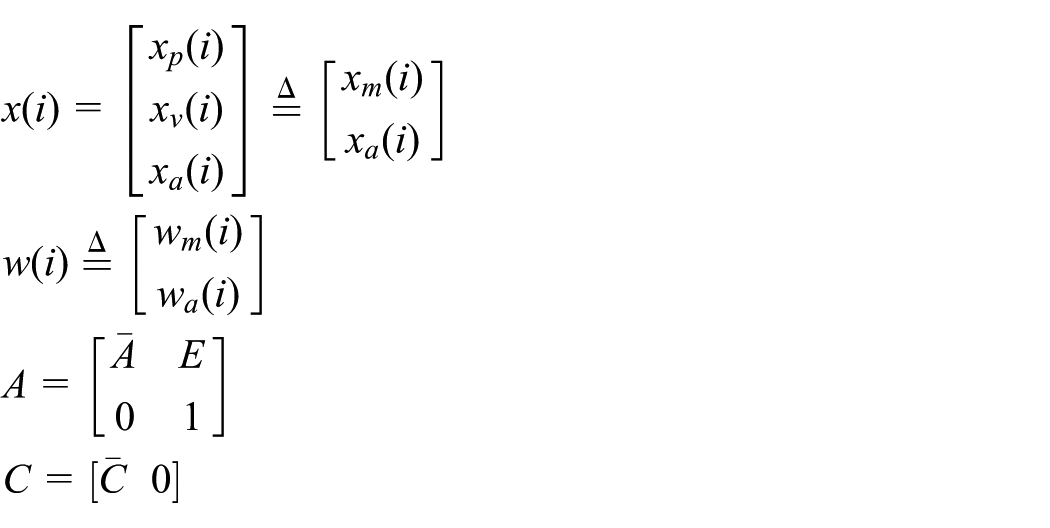
with

The state variable
The main task of this article is to propose an FMS filtering–based indoor positioning in wireless sensor networks (WSNs). The proposed FMS filtering–based indoor positioning in WSN estimates moving target’s random position in real time, removing undesired noisy effects, while preserving desired position. First, an FMS filter

when there is measurement delay as shown in equation (1). Note that the delay length d satisfies
On the window

where

Then, the measurement model in equation (1) can be written as

with

where


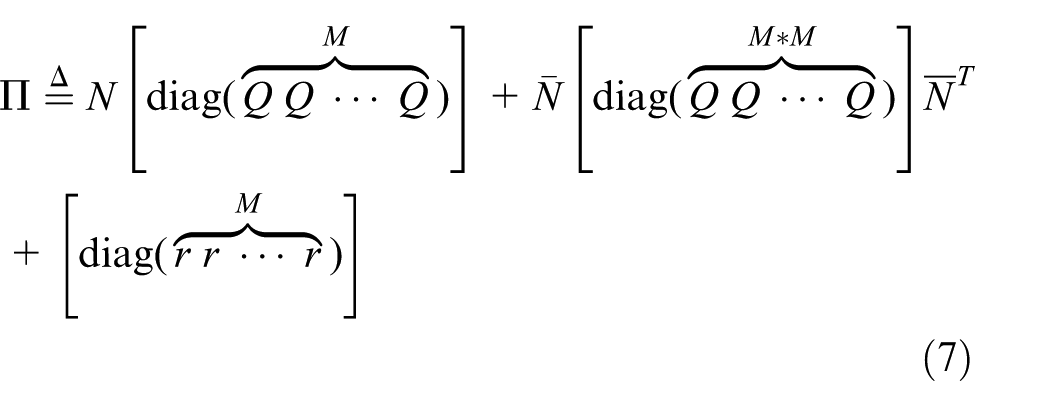
The noise term
Now, to get the filtered estimate

Taking the derivation of equation (8) with respect to

where the filter gain matrix H is defined by

and L and
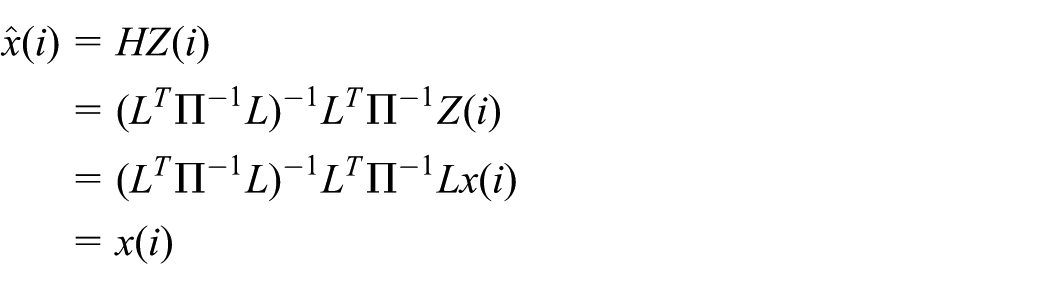
Therefore, for the state-space model (1) with measurement delay, the filtered estimate

where
It is noted that the proposed FMS filter (11) minimizing the cost function (8) is optimal in the sense of the minimum mean square error (MMSE) when the Gaussian noises are applied and is also optimal among unbiased filters even for non-Gaussian noises. The matrix L is of full rank since
Inherent properties
In this section, several properties and design parameters of the proposed FMS filtering–based indoor positioning mechanism are described.
Deadbeat property
The following propositions show that the filtered estimates
Proposition 1
Assume that
Proof. When there are no noises on the window

The measurements

Therefore, the following is true
This completes the proof of the deadbeat property. ■
The FMS filter
The deadbeat property in Proposition 1 gives the following matrix equality

and thus

where

Thus, the following identities are obtained

which will be used later.
A delayless system with constant acceleration
As shown in existing filtering-based mechanisms in Ribeiro et al.,
5
Yi and Zhou,
6
Chen et al.,
7
and Kim et al.,
14
the delayless of measurements is considered. When there is no time delay of measurements, it will be shown that a constant acceleration on the measurement window does not induce the error in filtered estimate for moving target’s position and velocity. Note that a constant acceleration can occur in actual situation although the state-space model (1) is developed with the consideration of random-walk acceleration. When there is no time delay in measurements, the regression form of finite measurements

where

Thus, it will be shown in the following proposition that a constant acceleration on the measurement window
Proposition 2
When there is no time delay of measurements (i.e.
Proof. When the time delay is

Then, the filtered estimate

The actual state vector
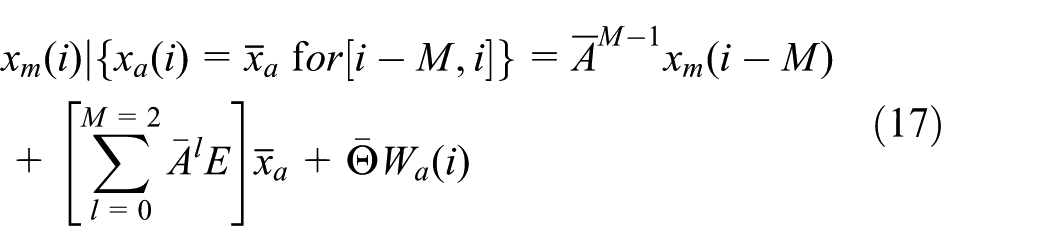
where

which does not include the acceleration term. This completes the proof. ■
Proposition 2 means that a constant acceleration does not degrade the moving target’s tracking performance in the proposed indoor positioning mechanism when there is no time delay of measurements. Therefore, it can be stated that the proposed mechanism performs well for the moving target with constant acceleration as well as random-walk acceleration.
Robustness and time-invariance
According to Fitzgerald, 8 Kim and colleagues,9–11 Shmaliy and Ibarra-Manzano, 12 and Zhao et al., 13 it is a general thumb rule that the proposed FMS filtering–based mechanism might also be robust against temporary modeling uncertainties or round-off errors due to its FMS, while the IMS filtering–based mechanism might be sensitive for these situations.
The filter gain matrix H in equation (9) for the FMS filter requires computation only on the interval
Useful design parameter : window length M
The important issue here is how to choose an appropriate window length M to make the filtering performance as good as possible. The noise suppression of the proposed mechanism might be closely related to the window length M. The proposed mechanism can have greater noise suppression as the window length M increases, which improves the filtering performance of the proposed mechanism. However, in case of too large window length M, the real-time application is somewhat difficult due to the computational load. This illustrates the proposed mechanism’s compromise between the noise suppression and the computational load. Since M is an integer, fine adjustment of the properties with M is difficult. Moreover, it is difficult to determine the window length in systematic ways. In applications, one way to determine the window length is to take the appropriate value that can provide enough noise suppression.
Therefore, it can be stated from the above discussions that the window length M can be considered as a useful parameter to make the performance of the proposed mechanism as good as possible.
Computer simulations
For the moving target’s successive locations for the X direction in WSN, as represented in section ”An FMS filter for indoor positioning in WSN” by the discrete-time, third-order, state-space model (1) with sampling time T and measurement delay d, the performance of the proposed FMS filtering–based indoor positioning mechanism (11) is evaluated via computer simulations and compared with the existing IMS filtering–based mechanism in Ribeiro et al., 5 Yi and Zhou, 6 and Chen et al. 7
Computer simulations are performed for two cases as shown in Figure 1. The first scenario considers that the target moves with slowly varying acceleration. The second case considers that the target moves with rapidly varying acceleration. The sampling period is taken as

Two kinds of accelerations.
Before actual simulations for two scenarios, the mean of root-squared estimation errors of the moving target’s position is computed for the moving target with constant velocity (zero acceleration) in order to determine the optimal window length that can provide enough noise suppression. The mean of root-squared estimation errors of the moving target’s position is plotted according to diverse window lengths in Figure 2. It can be seen that the mean of root-squared estimation errors reduces as the window length grows and converges when the window length is

Finding optimal window length.
To make a clearer comparison, simulations of 30 runs are performed using different system and measurement noises and each single simulation run lasts 800. Figure 3 shows the mean of root-squared estimation errors of the moving target’s position for all simulations. The proposed FMS filtering–based mechanism is comparable with the IMS filtering–based mechanism in case of the first scenario. However, the proposed mechanism is better than the IMS filtering–based mechanism in case of the second scenario for all simulations. Figure 4 shows the root-squared estimation error for moving target’s position using one sample simulation. It can be seen that the proposed mechanism can be better than the IMS filtering–based mechanism on the interval where the acceleration varies rapidly. On the interval, where the acceleration varies rapidly, the estimation error of the proposed mechanism is remarkably smaller than that of the IMS filtering–based mechanism. In addition, the convergence of the estimation error for the proposed mechanism is much faster than that of the IMS filtering–based mechanism when the acceleration varies constantly. These results might come from the fast convergent time and the fast ability due to deadbeat property and FMS structure of the proposed indoor positioning mechanism.

Mean of root-squared estimation error of moving target’s position for all simulations.

Root-squared estimation error of moving target’s position.
Concluding remarks
In this article, the alternative indoor positioning mechanism has been proposed for WSNs. The proposed mechanism gives the filtered estimates for moving target’s position and velocity in real time, while removing undesired noisy effects and preserving desired locations. The well-known FMS filter has been adopted for filtering. The filtered estimates for moving target’s position and velocity have good inherent properties. Especially, it has shown that a constant acceleration does not induce the error in filtered estimates for the moving target’s position and velocity. In addition, it has been shown that they can make the estimation performance of the proposed mechanism as good as possible from discussions about the choice of window length and normalized noise covariance. Finally, through extensive computer simulations, the proposed FMS filtering–based mechanism has shown to outperform the existing IMS filtering–based mechanism for the abruptly varying acceleration of the moving target.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the MSIP (Ministry of Science, ICT and Future Planning), Korea, under the ITRC(Information Technology Research Center) support program (IITP-2016-H8601-16-1003) supervised by the IITP(Institute for Information & communications Technology Promotion).