
Abstract
There have been a number of dance and ballet education systems using different multimedia devices. One of the well-known multimedia devices is Kinect which uses multiple built-in sensors. We focus on Kinect-based dance and ballet education systems. Existing systems that use Kinect cannot properly recognize the turnout movement. We propose the use of a lower body joint point estimation algorithm and a closest foot points estimation algorithm that can efficiently perform image localization for recognition of basic ballet movements. In addition, in order to evaluate correct ballet movements, we propose a method that extracts partial features from still scenes and performs measurements for knee and foot positions. The proposed method is the first ballet education system that properly measures movements of a ballet dancer.
Keywords
Introduction
Ballet is a well-known type of dance that uses the human body to express inner emotions and feelings. In addition to requiring physical development, ballet can also stimulate mental and emotional human development. 1 Traditionally, a ballet instructor is responsible for development of correct ballet techniques of a dancer. However, it is difficult for a ballet instructor to determine how much of the body movements of a dancer are incorrect because, in most cases, the instructor relies on visual experience. 2
There have been a number of dance and ballet education systems that use different multimedia devices. However, most of these devices are expensive and uncomfortable to use. As a result, alternative methods that use inexpensive multimedia devices, such as Kinect, have been proposed. However, the drawback of existing methods is that in certain cases, Kinect produces errors in recognition of certain joint positions. For example, Kinect cannot properly detect the turnout movement in which rotation of the leg from the hips causes the knee and foot to turn outward, away from the center of the body. 3
We propose an efficient ballet education method that focuses on lower body joints. For this, we propose the two algorithms: lower body joint point estimation (LJE) and closest foot point estimation (CFE). On one hand, LJE analyzes joint skeletal data and is used for recognition of joints of the first and second foot positions among the five foot positions of ballet. On the other hand, CFE is used for processing data obtained from a side optic sensor and measures lower body joints based on the analysis of still scenes from the side. CFE is mainly applied for recognition of the fourth and fifth foot positions.
More specifically, we make the following contributions:
The disadvantage of Kinect for ballet education is that the turnout movement cannot be detected. In order to solve this problem, we propose the LJE algorithm, which can properly detect the knees and feet of a ballet dancer. This is the first research to address detection of the turnout movement.
Another problem of using Kinect in ballet education is movements where a ballet dancer crosses the feet cannot be detected at some foot positions. In order to solve this problem, we propose the CFE algorithm that estimates foot joint positions using a side optic sensor;
We propose a ballet basic education interface (BEI) for efficient ballet education. BEI embraces both LJE and CFE algorithms and provides accuracy of visualization for certain ballet movements. In addition, instructional feedbacks are provided in real time.
This article proceeds as follows: In section “Ballet education,” we explain ballet education and terminology. In section “Related work,” we introduce related work for ballet education. In section “New alternatives for restrictions of Kinect ballet education,” we introduce a measuring function for ballet education, the LJE and CFE algorithms, and the ballet BEI. In section “Performance evaluations,” we explain experiment results. In section “Conclusion,” conclusions are presented.
Ballet education
This section describes essential elements of ballet education. We first describe basic ballet education movements in section “Basic ballet movements” and then present terminology that is used in this article in section “Terminology.”
Basic ballet movements
Ballet is a combination of movements. It is important to educate a ballet dancer in correct movements as it leads to good performance. Generally, there are two types of training methods in ballet education, such as bar work and center work. In bar work, ballet dancer holds a bar with one hand and practices the basic movements. In center work, ballet dancer performs the same ballet movements without bar. The center work is an appropriate method to evaluate the movements trained using bar work. In most cases, the movements that are not correct in center work are practiced again using bar work. Traditionally, ballet education focuses on training of lower body parts due to the fact that ballet is based on foot movements and, thus, requires development of muscles in both feet. For example, there are nine types of ballet movements that we can perform using bar work, such as plies, battement tendus, battement tendu jete, ronds de jambe a terre, battement fondus, ronds de jambe en l’ air, petits battement sur le cou-de-pied, battement developes, and grand battement jetes. 4 These nine basic ballet movements are based on training of lower body parts. Since lower body parts are essential for all ballet movements, it is important to develop a system that scientifically analyzes and determines correctness of a certain movement.
On the other hand, the five foot positions in ballet are first, second, third, fourth, and fifth positions for which it is important to spread the pelvis, distribute the weight equally on both legs, and not to move the hips downward. 5 In addition, the legs must be straightened, and the direction of both knees and feet must be the same. These foot positions are shown in Figure 1.

Five foot positions in ballet: (a) position 1, (b) position 2, (c) position 3, (d) position 4, and (e) position 5. 6
Plié is one of the basic ballet movements and has two variations such as demi plié and grand plié. Here, the direction of both knees and feet must be identical, while hips must not move downward. 3 Figure 2 demonstrates these movements. Here, the movement illustrated in Figure 2(a) and (b) is called demi plié, in which a dancer partially bends the knees in foot positions 1 and 2, respectively. Figure 2(c) and (d) indicates a grand plié, in which a dancer fully bends the knees in foot positions 1 and 2, respectively. It is also appropriate to practice demi plié and grand plié movements in foot positions 3, 4, and 5. When practicing grand plié in position 2, the feet must not be lifted from the floor, as shown in Figure 2(d).

Terminology
The terminology that is used throughout this article includes the turnout, in which movement is rotation of the leg from the hips, causing the knee and foot to turn outward, away from the center of the body. 4
Definition 1 (lower body joint points). Joint points
Definition 2 (LJE). The algorithm estimates lower body joint points
Definition 3 (estimated lower body joint points). Lower body joint points
Definition 4 (knee inner degree). The angle of the knee
Definition 5 (foot degree). The angle of the feet
Definition 6 (closest foot points). Detection of the closest position of the feet
Definition 7 (CFE). The algorithm measures a lower body ballet posture from a side view as described in section “LJE.”
Related work
A large body of work for dance and ballet education systems using different multimedia devices is briefly described. Chan et al. 9 proposed a dance education system based on motion capture and virtual reality (VR) technologies. The proposed system provides a virtual interface where a dancer can repeat movements instructed by a virtual teacher. The proposed system captures motion data of the dancer and, after analysis, provides instructional feedback based on dancer performance. A similar system using mixed reality technology has also been proposed. 10 Sukel et al. 11 proposed a process for design of an interface for a nonconventional computational system that teaches ballet. The proposed system provides interaction and communication features where a student can ask for repetition and feedback, make specific queries, and practice at different speeds. The aforementioned systems9–11 use different wearable devices for recognition of joint positions. However, most of these devices are expensive and uncomfortable to use. In addition, in certain cases, wearable devices require a complicated recognition procedure for joint position and, thus, are difficult for application in real life.
An alternative multimedia device, which is relatively cheap and easy to use, is Kinect. Recently, there have been a number of dances and ballet education systems proposed based on Kinect. For example, Marquardt et al. 12 proposed a Kinect-based ballet education system called Super Mirror that captures motion data of a ballet dancer, provides analysis of technique, and provides instructional feedback in real time. Trajkova and Ferati 13 evaluated the usability of the Super Mirror for ballet education. Sun et al. 14 and Muneesawang et al. 15 proposed a ballet dance education system in a cave automatic virtual environment (CAVE). Similar to the Super Mirror, the proposed method also provides instructional feedback based on an interface for visualization of instructions and feedback in a CAVE. The drawback of aforementioned systems12,14 using Kinect is that in certain cases, the systems are not suitable for evaluation of correct ballet movements. For example, the existing methods cannot properly detect the turnout movement, which is one of the main movements in ballet. To overcome these drawbacks, we propose the LJE and CFE algorithms that can increase the detection accuracy of ballet movements.
New alternatives for restrictions of Kinect ballet education
In this section, we describe a proposed method for efficient ballet education. Specifically, in section “LJE,” we first explain the LJE algorithm for detection of lower body joint points and measurement of the turnout movement and knee inner degree using Kinect. In section “CFE,” we describe the CFE algorithm for estimation of closest foot points using a side optic sensor. In section “Ballet BEI,” we present the BEI that includes both the LJE and CFE algorithms.
LJE
Kinect recognizes up to 20 human joints, which enables easy estimation of body parts. However, as mentioned in section “Introduction,” one of the drawbacks of using Kinect for ballet education is a low degree of accuracy for recognition of lower body joints, such as knees and ankles. In addition, Kinect cannot recognize the heel, which is one of the essential lower body parts in ballet. Thus, the turnout movement cannot be detected by Kinect. In order to overcome the aforementioned drawbacks of Kinect, we propose the LJE algorithm that can properly measure plié movements. Figure 3 shows the process of extracting features from lower body joints when a ballet performance is observed from the front.

Partial feature extraction using LJE.
The LJE algorithm shown in Figure 5 contains the following steps: A color image and skeletal data from Kinect are used without depth data because the feet in plié are always on the floor, and thus, it is difficult to distinguish the floor and the feet based on Kinect depth data for estimation of lower body joint points. Accordingly, we first obtain a color image and lower body joint points
More specifically, the LJE algorithm proceeds as follows: We first generate a binary image using Otsu’s algorithm 17 for extraction of a human shape from a color image. Otsu’s algorithm divides pixels into the two classes of intraclass and interclass based on the T threshold value for separation of background and foreground and then calculates the maximum T value ratio between variances of the intraclass and interclass


where TH in equation (1) is an adaptive threshold for binarization, and
Figure 4 shows the detection process of interest points when a ballet performance is observed from the front. We extract interest points for accurate estimation of joint points. In human visual perception, human knee, toe, and heel positions have a convex shape. Based on this evidence, interest points are constructed based on

Finally, we use a mean-shift algorithm
16
for extraction of lower body joint points from interest points. The mean-shift algorithm is used to find the centroid of the data distribution. Figure 5 demonstrates the shifting process of the knee joint position using mean-shift algorithm. Here, we use an initial seed as lower body joint points
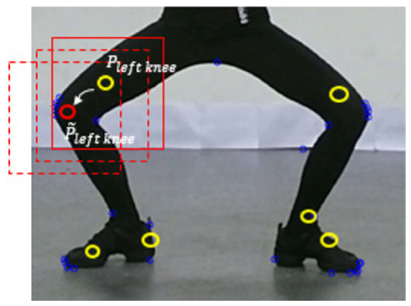
For estimation of accurate joint positions, movement of initial seeds using the mean-shift algorithm 16 of a still scene is used.
Specifically, the estimation process of lower body joint points using the mean shift is as follows:
Set up initial seed points
Extract interest points
Move to the current position based on calculation of a coordinate value
Re-iterate steps 2 and 3 until no permitted move
Algorithm 1 shows pseudo-code of the LJE algorithm. The input is an RGB image

In ballet, most movements are based on a turnout movement that has association with
Figure 6 shows measurements of lower body ballet postures that are used to achieve accurate plié movement measurements. We measure

Measurement of lower body ballet postures: (a)
Figure 7 shows crossed feet for measurement of the turnout movement. Figure 7(a) shows that measurement of the angle in the crossed foot state is difficult. Thus, we propose a method for measurement of the lower ballet posture from a side view using an optic sensor and detection of foot joint points using a horizontal line (white dotted line) between the closest foot points based on an optic sensor in Figure 7(b). The proposed method measures ballet performance not only from the front view but also from the side view.

The new alternative for detection of
We propose a measuring function for evaluation of accuracy of ballet movements. Specifically, we propose a scoring criterion for evaluation of
The scoring criteria for

The scoring criteria for

CFE
In a previous section, we explained how lower body ballet postures are measured using the LJE algorithm. However, in order to improve the efficiency of the proposed ballet education system, another alternative measurement of lower body ballet movements from the side when a ballet dancer is in an aligned foot position for a particular ballet foot position is needed. We propose the CFE algorithm that is able to measure lower body ballet posture from a side view. The process for detection of closest foot points is shown in Figure 8.

The process of the CFE algorithm using side optic sensor.
In order to measure lower body ballet posture from a side view, in contrast with the LJE algorithm, the CFE algorithm uses an optic sensor instead of Kinect. The optic sensor can capture an RGB image and detect closest foot points based on symmetric information using polynomial approximation. Thus, (1) a binarization process is performed on an RGB image obtained from an optic sensor, and (2) contours are extracted from the binary image.
17
Furthermore, we detect (3) interest points using polygonal approximation.
18
Then, we identify (4) symmetric points by finding a centroid of interest points and (5) detect the closest foot points based on selection of the largest y values on the y-axis for each point set


where



where

Ballet BEI
A ballet BEI is presented for efficient ballet education. The BEI includes software using the LJE and CFE algorithms for measurement of ballet movements. The BEI provides visualization of the degree and scores for plié ballet movements and provides real-time feedback messages to users. Figure 9 displays the user interface (UI) of BEI, and Table 3 shows the function and the specification equivalent to Figure 9. More specifically, the proposed interface has the following functions:
Provides a function for training of core ballet movements and helps a user in injury prevention and improvement of physical strength via training for ballet movements;
Provides real-time feedback and visualization of measurements from the LJE and CFE algorithms and real-time feedback messages and guides direction of correct ballet movements;
Provides a self-training system for study of ballet movements and helps learning by providing a comparison between an expert and user ballet movements.

User interface (UI) of BEI.
The function and the specification of BEI.
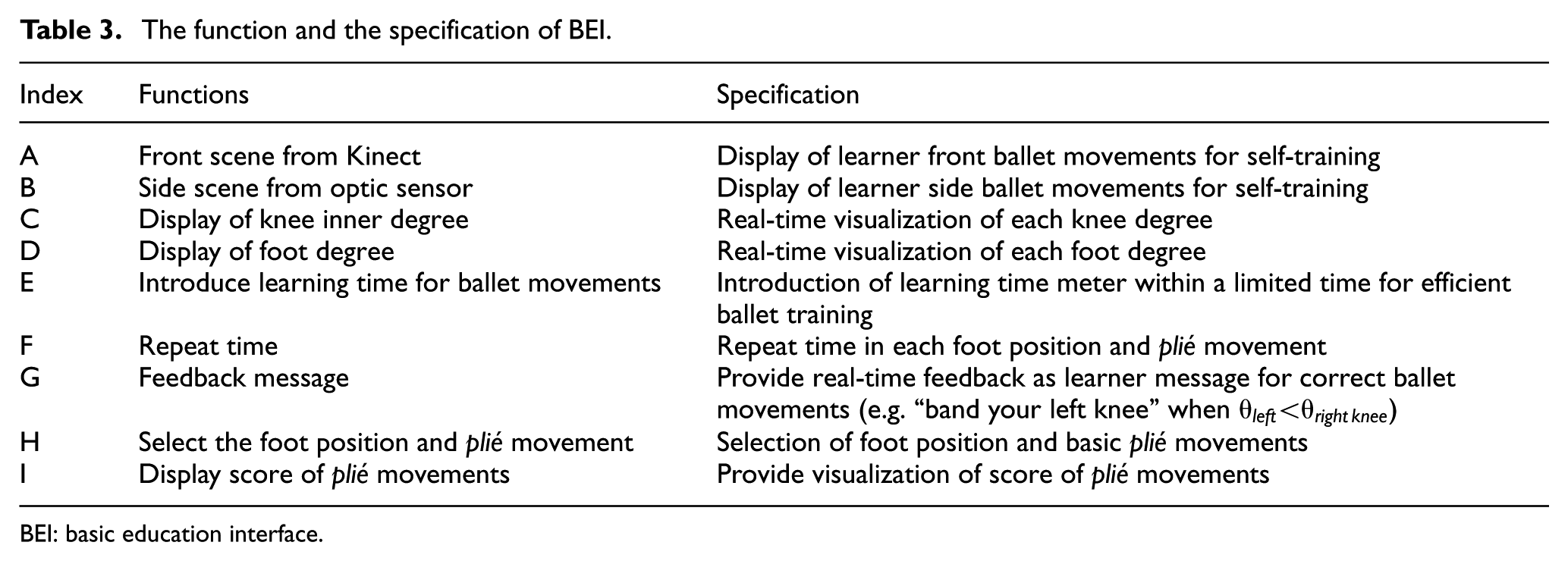
BEI: basic education interface.
Figure 10 shows a flowchart for the BEI program. A detailed description of the BEI flowchart is as follows:
A learner can select the ballet foot position (1, 2, 4, and 5) and ballet plié movement (demi and grand plié);
Watching the expert video from the front and side views continuously;
Learn ballet movements;
Measurement extraction for plié movements of the feet for positions 1, 2, 4, and 5 using LJE and CFE algorithms;
Display the measurements and feedback message in the real time;
Repeat steps 3–5 within a limited time;
Comparison between learner and expert ballet movements.

Flowchart of the BEI program.
Performance evaluations
This section describes experimental results. In section “Experimental environment,” we describe the experimental environment. In section “Experiment 1: comparison of the accuracy of the LJE and CFE algorithms,” we compare the accuracy of lower body joint points (
Experimental environment
This section introduces the experimental environment for experiments 1 and 2. Figure 11 illustrates the experimental environment. For experiment 1, we set the Kinect in front and an optic sensor at the side. The learner can train for ballet movements using the BEI program projected on a screen. We performed experiments on plié movements at each foot position. For experiment 2, we selected five female students. We performed experiments on plié movements at the two foot positions such as foot positions 1 and 4. It is important to note that this experimental environment is used in experiment 2.

Environment for experiment.
Experiment 1: comparison of the accuracy of the LJE and CFE algorithms
For the LJE algorithm, we performed experiments for comparison of accuracy between estimated lower body joint points and skeletal data from Kinect. However, Kinect has a limitation because skeletal data cannot provide heel points. Moreover, Kinect cannot accurately detect lower body joint points for correct evaluation of lower body ballet movements. Thus, for comparison of the accuracy of estimated joint points, heel points were generated using ankle data, and tiptoe points were derived from skeletal data. For fair comparison, we used derived heel points based on a relationship between joint points from skeletal data. Figure 12 shows the relationship between joint points (ankle, tiptoe, and heel points). Let
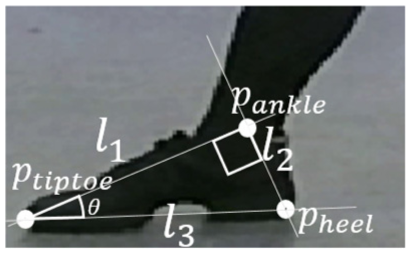
Relationship between joint points.
Table 4 shows measurable lower body joint points for the LJE algorithm at different ballet foot positions and for different plié movements. The value of
Measurable lower body joint points for the LJE algorithm at different ballet foot positions and for different plié movements.

LJE: lower body joint point estimation.
Figure 13 shows the lower body joint points from ground truth (blue circle), Kinect skeletal data (red circle), and the LJE algorithm (white circle) for positions 1 and 2. Estimated lower body joint points are near real joint points since the proposed algorithm uses shape information for estimation of joint points.

Lower body joint points from ground truth (blue circle), Kinect skeletal data (red circle), and the LJE algorithm (white circle) at positions 1 and 2: (a) demi plié at position 1, (b) grand plié at position 1, (c) demiplié at position 2, and (d) grand plié at position 2.
However, the proposed algorithm has two limitations. First, we cannot recognize heel position because of crossed feet. This limitation is shown in positions 4 and 5. Second, we cannot recognize knee position relative to feet because shape information for knees is not presented. Figure 14 shows the lower body joint points from ground truth (blue circle), Kinect skeletal data (red circle), and the LJE algorithm (white circle) for the fourth and fifth positions.
Lower body joint points from ground truth (blue circle), Kinect skeletal data (red circle), and the LJE algorithm (white circle) for positions (a) 4 and (b) 5.
To verify the quantitative accuracy of

Error values of the LJE algorithm and Kinect skeletal data for foot positions 1 and 2: (a) error values for knee points, (b) error values for tiptoe points, and (c) error values for heel points.
Figure 16 shows the closest foot points from ground truth (blue circle), Kinect skeletal data (red circle), and the CFE algorithm (white circle) for each foot in position 4. Estimated closest foot points are closer than skeletal data from real joint points.

Closest foot points from ground truth (blue circle), Kinect skeletal data (red circle), and the CFE algorithm (white circle) at foot position 4: (a) left foot in front and (b) right foot in front.
To verify the quantitative accuracy of
Error values for the CFE algorithm and Kinect skeletal data at foot position 4.
CFE: closest foot point estimation.
Experiment 2: a feasibility test using collaborated sensors for ballet education
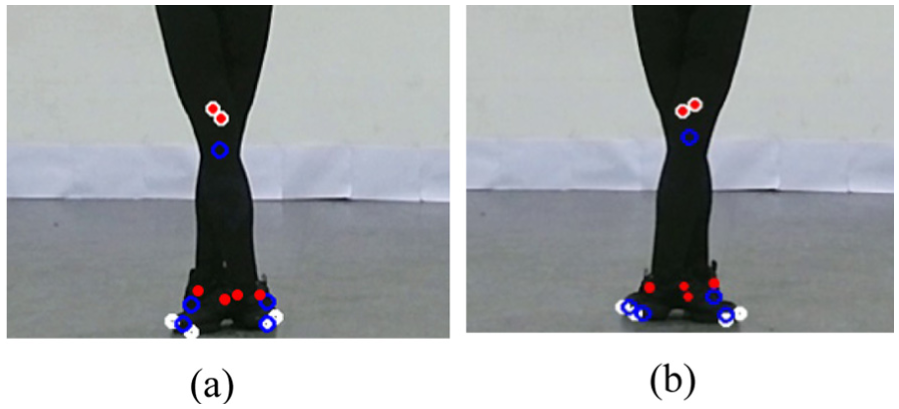
The procedure for experiment 2 was as follows: First, a learner selects a plié type and foot position. Second, the learner watches an expert educational guide video prior to practice. In this level, the learner can check the angles of knee and tiptoes in real time. Repetitive practice must produce a score of at least 95 based on scoring criteria as shown in Tables 1 and 2. In this level, the learner practices ballet without an angle view of the knee and tiptoe. After finishing practice, the learner can identify accuracy and watch side motion and front motion for comparison with expert motion. The learner can confirm the closest foot horizontal alignment from the side and the accuracy of ballet posture from the front. Figure 17 shows real plié movements for ballet education.

A learner ballet movement using the BEI program: (a) front image and (b) side image.
Based on the experimental results, the average repeat time to achieve a score of 95 is 1.4 with demi and position 1, 2.8 with demi and position 4 for the right foot in front, 1.6 with demi and position 4 for the left foot in front, 2.2 with grand and position 1, 1.8 with grand and position 4 for the right foot in front, and 2.4 with grand and position 4 for the left foot in front as shown in Figure 18. Basic learner timing of skill improvement has a mean score of 95. These are useful data in future work for setting of an average time for practice.

Average repeat time for plié movements and foot positions for learners.
Conclusion
We have focused on ballet education based on Kinect. We have solved the Kinect problem of nonrecognition of the turnout movement based on the use of the two new algorithms LJE and CFE. The proposed method is the first for measurement of the accuracy of lower body joints. In addition, we have proposed a ballet interface and performed experiments based on ballet scenarios. Experimental results show that the LJE algorithm has a high degree of accuracy for recognition of knees, feet, and heels, in comparison with skeletal data of Kinect. Specifically, on one hand, the accuracy of detecting knees when performing demi plié is increased by 2.4 times in foot position 1; 3.1 times in position 2; and when performing grand plié, the accuracy of foot position 1 is increased 4.3 times and position 2 is increased 1.7 times. On the other hand, the accuracy for detection of tiptoe when performing demi plié is increased 19.5 times in foot position 1 and 14.7 times in position 2. For grand plié, the accuracy is increased 36.9 times in foot position 1 and 26.4 times in position 2. CFE algorithm also provides a higher degree of accuracy for estimating the closest foot points comparing to Kinect skeletal data by approximately 7.2 times. Proposed algorithm can be applied for other applications that require the estimation of lower body joint points such as movement analysis in sports and dances.
However, the limitation of the proposed method is that we could not detect accurate lower joint points in the foot positions 4 and 5 using LJE algorithm due to hidden joint points. Thus, in future work, we will solve this problem and demonstrate application of Kinect in ballet education.
Footnotes
Academic Editor: Debi Dogra
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Institute for Information & communications Technology Promotion (IITP) grant funded by the Korea government (MSIP) (No. R0115-16-1009, Development of smart learning interaction contents for acquiring foreign languages through experiential awareness).