
Abstract
The uncertainty problem in sensor track to local track association is a difficult problem in distributed sensor networks, particularly when there is a big difference of sensors’ tracking performance. To solve this problem, a weighted fuzzy track association (FTA) method based on Dempster–Shafer theory is proposed. In the proposed method, five characteristics of sensor tracks from different sensors are established, and meanwhile their belief functions are defined to determine the corresponding beliefs. Considering the different effects of sensor tracks on track association, the reliabilities of sensor tracks are further presented and their magnitudes can be calculated by the combination belief function defined. Then, these reliabilities are used to reconstruct the fuzzy association degrees by the FTA method. The proposed method has an advantage that it can dynamically allocate the weight of each sensor track in association decision according to its characteristics. The performance of the proposed method is evaluated by using two experiments with simulation data in manoeuvring and uniform situations. It is found to be better than those of other two track association methods in tracking accuracy.
Keywords
Introduction
Multiple target tracking (MTT) has become an important research direction in distributed sensor networks (DSNs).1–4 Particularly in a large scale sensor network, each local fusion centre needs to process big amount of sensor tracks obtained by different sensors. This leads MTT to become increasing complexed. Track association, the prerequisite for track fusion, is a key procedure in MTT.5–8 Hence, it is necessary to improve the performance of track association in processing rate and fusion results in accuracy. In DSNs, each local node utilizes sensor tracks to generate local tracks. Due to the uncertainty of track association, it becomes very difficult. Generally, the traditional track association methods only concern how to establish an uncertainty model. They usually assume that sensor tracks from different sensors possess similar or equal accuracy, and these sensor tracks have the same effects on association decision.8,9 In this assumption, the track association method based on fuzzy membership proposed in the study by Ran and Zhang 10 can achieve good association results. It handles two local estimates of two tracks per association judgment, and it needs several times of judgements to update the fused tracks until the association quality is satisfied. Unfortunately, the above assumption is usually unsatisfied in real situations due to the existing uncertainty in track association mentioned above. Therefore, the performance of the traditional track association methods will degrade seriously in actual applications.
To solve this uncertainty problem in track association, one needs to establish the reasonable belief model of track association. Based on the above analysis, one can assume that sensor tracks from different sensors possess unequal effects on association decision, and their reliabilities are defined according to the prior information in tracking process. The reliability-weighted nearest neighbour track association (RW-NNTA) method proposed in the study by Fan et al. 11 utilizes the fuzzy analytic hierarchy process algorithm to calculate the reliabilities of sensor tracks according to the prior information of the corresponding sensors. However, once the reliabilities are determined, and then their magnitudes are fixed in the whole association decision. As a result, the reliabilities can’t reflect the changes of local tracks’ qualities with time. In fact, the weights of sensor tracks in track association should possess the optimum weights at different time, and one can dynamically evaluate them according to the prior information of moving targets. The performance of the RW-NNTA method will degrade when target motion models change. Considered the uncertainty in data association, the data association method based on Dempster–Shafer (DS-DA) theory in the study by Zhang et al. 12 is developed to solve measurement to sensor track in passive sensor networks. It extracts six characteristics in measurement-to-local track (M2LT) association to construct the corresponding evidences. Based on the beliefs of different evidences, it further defines a combination belief function to calculate the association degree on M2LT directly. The DS-DA method can reduce the effects of observed noises and clutters on track association and simplify data association procedures. Because track association can be seen as generalized data association, the DS-DA method can provide a good thought for track association in DSNs, too. However, considered that there are no clutters in track association and that observed noises have been filtered in M2LT, the DS-DA method can’t be directly applied in track association.
Generally, the traditional track association methods can be classified into two kinds: the statistical track association methods 13 and the fuzzy track association (FTA) methods.14,15 Recently, the statistical track association methods mainly concern the track association problems on noises, deviations, uncertainty and the information on high dimension states and target attributes,16–18 which make them increasing complicated. The FTA methods possess the strong advantage on processing uncertainty problems based on fuzzy theory, and they are widely applied in MTT.1,19,20 Based on the above facts, a weighted FTA method based on Dempster–Shafer theory (DS-WFTA) is proposed to solve sensor track to local track (ST2LT) association in DSNs when there is a big difference of sensors’ tracking performance. In the proposed method, the characteristics are extracted from sensor tracks obtained by different sensors, and the belief functions are defined to determine the corresponding beliefs. The reliabilities of sensor tracks are further presented, and they can be calculated by the combination belief function. Then, they are used to reconstruct the fuzzy association degrees by using the FTA method. Hence, the proposed method can provide the advantages of the DS-DA method and the fuzzy track method.
The remainder of this article is organized as follows: in section ‘DSN model’, the DSN model is introduced, and then the procedures of data processing in DSNs are analysed; in section ‘D–S theory and multiple source combination’, D–S theory and combination rule are utilized for the characteristics of sensor tracks; section ‘Weighted fuzzy track association method based on D–S theory’ proposes the DS-WFTA method; section ‘Experiment results and analysis’ presents the experiment results and the performance of the DS-WFTA method compared with the other two track association methods and finally, the conclusions are provided in ‘Conclusion’ section.
DSN model
The DSN is an important structure model in sensor networks. It can be divided into the hierarchical model and the full distributed model,21,22 as shown in Figure 1. This article mainly discusses the former, which is mainly originated from the military domain. The hierarchical sensor network consists of three layers according to the input data stream: 11 the data-captured layer on various sensors, the data-processed layer on local nodes and the data-analysed layer on the global node. In data-captured layer, each sensor obtains measurements on moving targets in air surveillance, realizes track initialization, data association and data fusion between measurements and sensor tracks to update sensor tracks and then these sensor tracks are transmitted to local nodes. In the data-processed layer, similarly, each local node processes sensor tracks from various sensors, realizes track association and track fusion between sensor tracks and local tracks to update local tracks and then these local tracks are transmitted to the global node. In data-analysed layer, the global node analyses local tracks, realizes track association and track fusion between local tracks and global tracks to update global tracks and then forms a uniform situation. The proposed method in this article only concerns ST2LT association in data-processed layer.
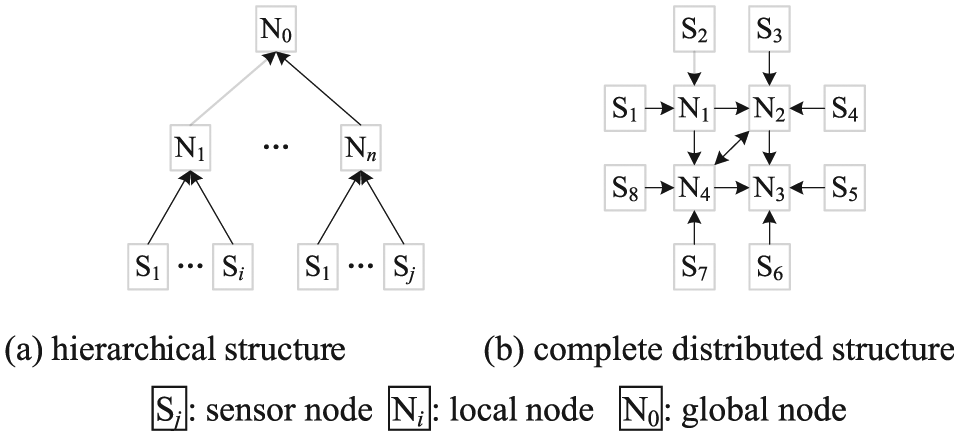
Structure model of DSNs. DSN: distributed sensor network.
D–S theory and multiple source combination
D–S theory and combination rule
D–S evidence theory is a well-known evidential theory framework and an important uncertainty reasoning method. It provides an effective tool for description and fusion of uncertainty information, which is widely utilized in various applications for data fusion, information decision, target recognition and risk analyses. Its detailed presentation has been given in the studies by Zhang et al. and Shafer et al.,23–25 while it is just briefly described here. The framework of discernment
Definition. The belief function in hypothesis A is composed of the sum of belief masses attributed to A and its subsets expressed as follows:

Definition. The plausibility function in hypothesis A is composed of the sum of the belief masses attributed to any hypothesis, whose intersection with hypothesis A is non-empty, expressed as follows:

Here,
Many methods are developed for combining BBAs in different hypotheses for multiple evidence sources and generating a combination belief function. To determine the combination belief on the characteristics of evidence sources in real applications, one can utilize Dempster’s conjunctive rule for the combination of BBAs, which needs to satisfy the commutative, associative laws. The combination belief function can be expressed by the ⊕ operator as follows:

where
BBA and multiple source combination
Because the measure of sensor tracks’ reliabilities is too complicated or inappropriate, it will lead to the unreality of the belief model or reduce the correct rate of ST2LT association. 8 Hence, one can introduce the characteristics related with sensor tracks for designing a belief model on ST2LT association. 11 In DSNs, each sensor can obtain many measurements on targets and generate sensor tracks. Then different characteristics can be extracted from these sensor tracks for further calculating the reliability of each sensor track by evidence combination, namely the weight for its association with a local track. Hence, here a belief function is defined to determine the BBA of a belief for the corresponding characteristic in the track association model, and then all the BBAs are combined to calculate the reliability of each sensor track. Based on the study by Zhang et al., 12 the belief functions on five characteristics on a sensor track are utilized in this article:
(1) the detection probability of sth sensor,

Here,
(2) the tracking performance of sth sensor,

Here:

where
(3) the velocity variable of a moving target, 12

where,



Here,



where
(4) the heading change of a moving target,

Here,

where
(5) the flight time variable,

Here,


and
Hence, one can determine the reliability of each sensor track by the combination belief function defined in equation (3). Moreover, the combination belief function

Here,


where N is the amount of local tracks.
Weighted FTA method based on D–S theory
The traditional FTA method
Considering the advantage of the fuzzy association method, a synthetic function is selected to calculate the association degree on ST2LT association. 1 The FTA method can be divided three steps: determine the fuzzy factor set, select the synthetic function and calculate the association degree. In real applications, the position difference, velocity difference and heading difference in horizontal direction are usually utilized in fuzzy association decision.
Assuming that



Hence, the fuzzy factor set may be expressed as
Here,
Because the similarity measure in the fuzzy factor set is important for association decision, 26 here the synthetic function is usually utilized as an effective measure for the similarity of two vectors. Hence, one can use the following synthetic function in view of its simple computational complexity:

as the decision function for track association. Considering the influence of different fuzzy factors on association decision, one usually sets
Based on equation (26), the fuzzy association degree between local track

Here,
The proposed track association method
Based on section ‘The traditional fuzzy track association method’, the association operators of the traditional track association methods can be generally described by:

where

where

As a result, the main design procedure of the proposed method is illustrated as Table 1.
Design procedure by the proposed method.

Experiment results and analysis
Two experiments have been carried out on the hardware in loop simulation of a hierarchical fusion system to evaluate the performance of the proposed method (DS-WFTA) in comparison with the FTA
1
and RW-NNTA method.
11
Finally, the
Simulation scenario I: Manoeuvre model
As shown in Figure 2, there exists a local node


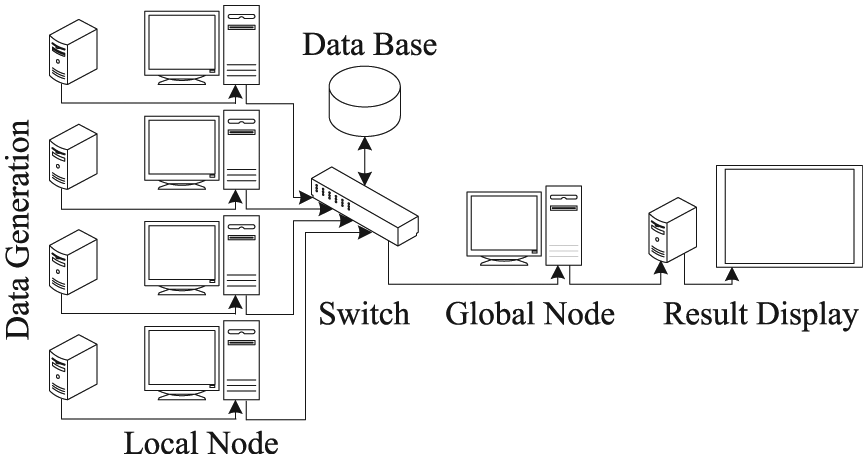
Hierarchical fusion system.

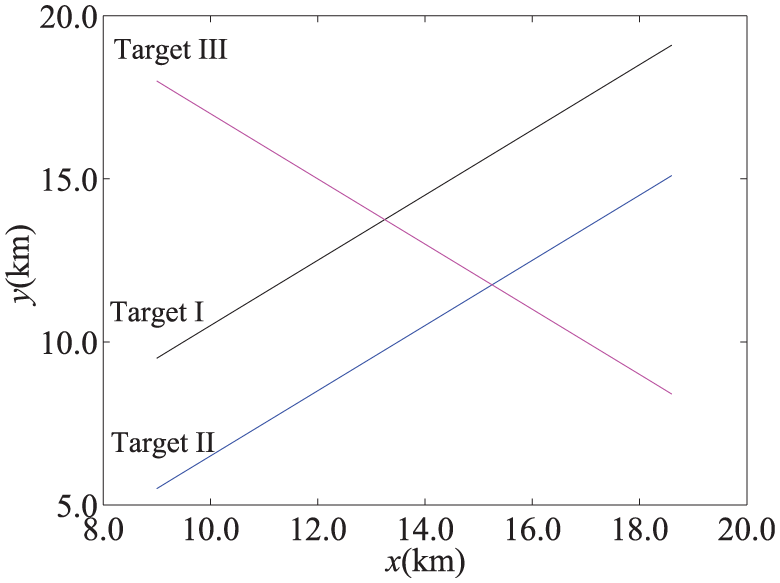
True trajectories of three targets.
Here,
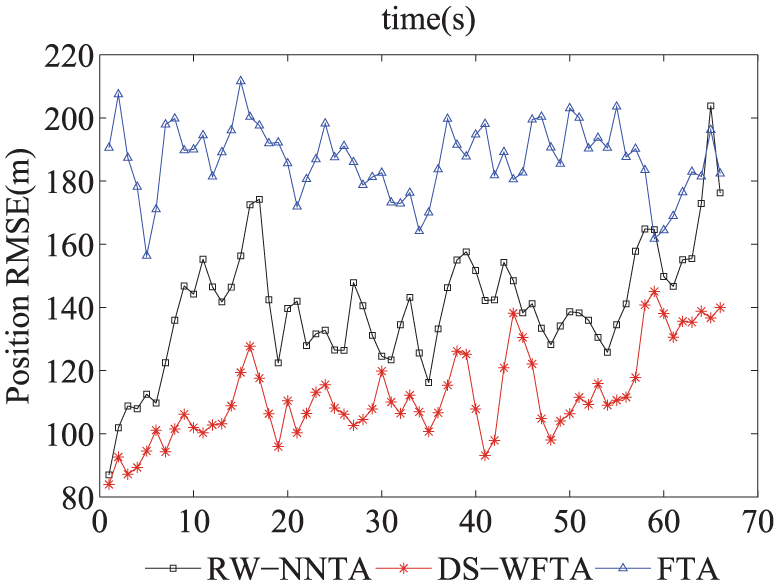
Figures 4 to 6 show the position root mean-squared errors (RMSEs) of three track association methods. From Figures 4 to 6, both the DS-WFTA method and the RW-NNTA method can keep high accuracy in tracking results when there exists a large difference of sensors in tracking accuracy. This is because that they consider the different effects of sensor tracks from different sensors on ST2LT association and establish the reliabilities of sensor tracks to reconstruct the track association degrees. Then, they can increase the weights of sensor tracks with higher reliabilities in association decision and improve the accuracy of local tracks. Namely, they reduce the chances of sensor tracks with low reliabilities participating in track association. In addition, the position RMSE by the DS-WFTA method is smaller than other two track association methods. Due to the consideration of sensor tracks’ characteristics, the DS-WFTA method presents the reliabilities of sensor tracks based on the beliefs of these characteristics by evidence combination, and then the reliabilities are used to dynamically allocate the weights of sensor tracks in association decision. Hence, the DS-WFTA method can obtain better performances compared with the RW-NNTA method. The FTA method obtains the largest position RMSEs, because it assumes sensor tracks are equally reliable when four sensors are assumed to exist a big difference in tracking accuracy. The average time of single association decision by the DS-WFTA method, the FTA method and RW-NNTA method is 0.0287 s, 0.0213 s and 0.0051 s, respectively. The average time for single association decision using the DS-WFTA method is longest since the execution of calculating the reliabilities of sensor tracks needs to consume a certain time.
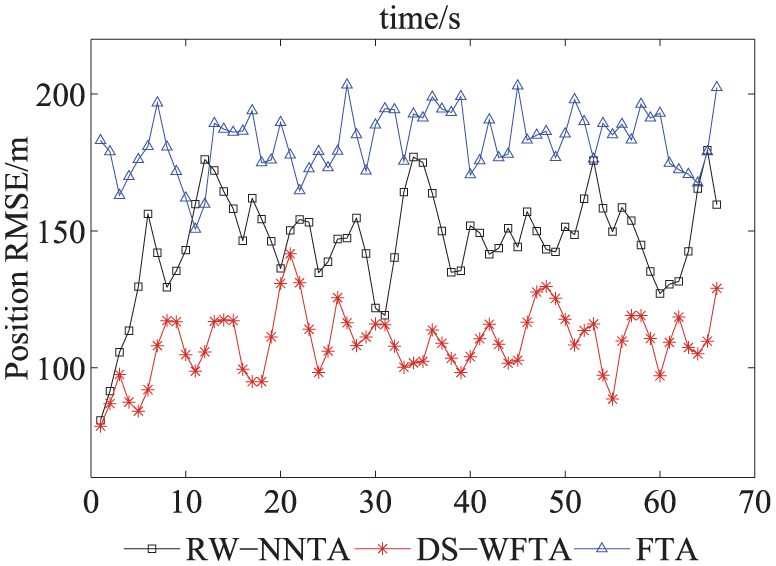
Position RMSE of track I. RMSE: root mean-squared error.
Position RMSE of track II. RMSE: root mean-squared error.

Position RMSE of track III. RMSE: root mean-squared error.
For further explaining why the position RMSEs of three track association methods are different during the whole time interval, we make the following discussion. In complexed scenarios for MTT by multiple sensors, there are multiple sensor tracks belonging to a moving target, and track association can be further divided to two types: track association between sensor tracks belonging to a target and track association between sensor tracks belonging to different targets. The latter generally corresponds to the situations with multiple or two target crossing. In two types of track association, at each time instant, there are multiple pairs of local estimates associated. In the traditional track association methods, all local estimates from different sensors will be used for filtering or fusion. But when there is a big difference of sensors’ tracking performance, the accuracy of tracking results for the traditional track association methods usually degrades because some local estimates associated are with low accuracy. The DS-WFTA method can provide the advantages that it can dynamically allocate the weight of each sensor track in association decision according to the change of five characteristics of the sensor track. Meanwhile, it can obtain good performance of track association in accuracy when there is a big difference of sensors in tracking accuracy. Although the RW-WFTA method also assumes different effects of sensor tracks from different sensors on association decision, the allocated weighs of sensor tracks are fixed in the whole track association. Hence, its performance will degrade when the motion model of a target is changed with time.
Simulation scenario II: Uniform model
Assume that there is a local node and four sensors in the hierarchical fusion system. The performance parameters of four sensors are listed as follows: range errors

Here, F is an
True trajectories of three targets. RMSE: root mean-squared error.
Figures 8 to 10 show the position RMSEs of three track association methods. From Figures 4 to 6, the position RMSE of the DS-WFTA method is smallest in all three association methods while that of the FTA method is largest. Because the DS-WFTA method and the RW-NNTA method introduce the reliabilities of sensor tracks from different sensors into ST2LT association, and they can allocate these reliabilities as the weights of the corresponding sensor tracks in association decision. As a result, they can improve the accuracy of tracking results. Moreover, the DS-WFTA method can dynamically calculate the reliabilities of sensor tracks by the combination belief function according to the characteristics of sensor tracks. Therefore, the DS-WFTA method can still obtain better performances compared with the RW-NNTA method in situation that targets are moving with constant velocity.

Position RMSE of track I. RMSE: root mean-squared error.

Position RMSE of track II. RMSE: root mean-squared error.

Position RMSE of track III. RMSE: root mean-squared error.
Conclusion
Track association in DSNs is a difficult problem of MTT, particularly in situation that there is a big difference of sensors’ tracking performance. The traditional track association methods generally assume that sensor tracks from different sensors are similar or equal reliable, this assumption is unsatisfied in real situations. Hence, they are limited in real applications. Actually, the weights of sensor tracks in track association possess the optimum weights at different time. Based on this reason, the DS-WFTA method is proposed to solve ST2LT association in DSNs, including the situation with a difference of sensors’ tracking performance. In the proposed method, five characteristics are extracted from sensor tracks, and the belief functions of these characteristics are defined to determine their corresponding beliefs. Considering the different effects of sensor tracks on association decision, the reliabilities of sensor tracks are further presented and their magnitudes are calculated by the combination belief function defined. Then, these reliabilities are used to reconstruct the fuzzy association degrees by using the FTA method. As a result, the proposed method can dynamically allocate the weighs of sensor tracks in association decision according to their characteristics. Furthermore, it can keep association results from multiple sources and make them robust. The results of two experiments show that the proposed method can realize ST2LT association and achieve better tracking performance in accuracy than the FTA method and the RW-NNTA method.
After ST2LT association in DSNs, local tracks are transmitted to the global node. In the future work, we will extend the proposed method to solve the problem of local track-global (LT2GT) association in DSNs. Moreover, considering the uncertainty problem of motion models on manoeuvring targets, we will combine the interactive multiple model method to solve the LT2GT fusion problem.
Footnotes
Declaration of Conflicting Interest
The authors declare that there is no conflict of interest.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (no. 61272034), the Startup Project of Doctor Science Research of Shaoxing University (no. 20145021 and no. 20155015), the Science Project of Shaoxing University (no. 2015LG1006) and the Public Welfare Technology Application Research-Industrial Project of Zhejiang Province (no. 2016C31082).