
Abstract
One of the fundamental problems in sensor networks is to estimate and track the target states of interest that evolve in the sensing field. Distributed filtering is an effective tool to deal with state estimation in which each sensor only communicates information with its neighbors in sensor networks without the requirement of a fusion center. However, in the majority of the existing distributed filters, it is assumed that typically all sensors possess unlimited field of view to observe the target states. This is quite restrictive since practical sensors have limited sensing range. In this article, we consider distributed filtering based on linear minimum mean square error criterion in sensor networks with limited sensing range. To achieve the optimal filter and consensus, two types of strategies based on linear minimum mean square error criterion are proposed, that is, linear minimum mean square error filter based on measurement and linear minimum mean square error filter based on estimate, according to the difference of the neighbor sensor information received by the sensor. In linear minimum mean square error filter based on measurement, the sensor node collects measurement from its neighbors, whereas in linear minimum mean square error filter based on estimate, the sensor node collects estimate from its neighbors. The stability and computational complexity of linear minimum mean square error filter are analyzed. Numerical experimental results further verify the effectiveness of the proposed methods.
Keywords
Introduction
Sensor networks have recently attracted a great deal of attention from many researchers in many scientific and engineering fields due to their wide scope applications in target tracking, robotics, weather forecasting, surveillance and environment monitoring, and wireless networks.1,2 A sensor network consists of a large number of sensor nodes that are distributed over a spatial region. Each sensor performs some level of communication, signal processing, and data fusion. Multi-sensor estimation through sensor networks gives higher accuracy than a single sensor node. This is partly because multiple data sources can provide more complementary information that is not available from individual sources. However, how to estimate an unknown quantity by fusing or integrating the information from multiple data sources and what information should be communicated between sensor nodes are two essential problems for multi-sensor estimation in sensor networks.
Distributed filtering has received much attention as one of the most important collaborative estimation of sensor networks.3,4 The distributed filtering has been gradually replaced by the centralized ones owing to the scalability, robustness to failure, and less communication of the sensor networks. Furthermore, it is impossible to apply a centralized processor as the sensor networks are of large scale (sensors usually have limited communication range, so they can only communicate with its direct neighbors) and the fusion functionality will malfunction if the fusion center fails. To avoid the requirement of a fusion center, the decentralized filtering has been proposed in Durrant-Whyte et al. 5 However, the sensor networks should be fully connected. In contrast to the decentralized estimation, the distributed filtering does not require all-to-all communication and there is no fusion center in the network. In the distributed filtering, each sensor is to compute state estimates based on its information and its neighboring sensors’ information according to the topology of the given sensor network. Therefore, for distributed filtering, even if some fusion nodes fail, the fusion functionality can still work.
Distributed filtering has been extensively studied under the consensus strategy. Consensus strategy is performed to reach an agreement regarding quantities of interest that depend on the local information of all nodes. By multiple consensus iterations of communication between neighbors, each node can individually compute a global estimate of the state, and the estimate asymptotically converges to a global result. The Kalman consensus filter6,7 is a class of distributed filter based on consensus strategy. The consensus of the state estimates between sensors through network communication can be achieved by adding a consensus term on the local state estimate of Kalman filter for each node. Deshmukh et al. 8 developed the globally optimal Kalman consensus filter. Battistelli et al. 9 proposed a hybrid “measurement + innovation” consensus-based on linear and nonlinear filtering, which is a combination of two existing consensus methods (i.e. consensus on measurement and consensus on information). The “innovations” consensus approach is extended in Das and Moura, 10 where the optimal gain is considered. A few of nonlinear filtering methods based on consensus strategy were introduced in Li et al., 11 Liu and Tian, 12 and Chen et al. 13 In Chen et al. 14 and Liu et al., 15 the high-dimensional distributed state estimation problem was investigated for a class of sensor networks within the cubature Kalman filtering framework. Recently, the problem of distributed filtering has been studied for a class of uncertain systems with uncertain noise variances.16–19
In the majority of the existing distributed filters, however, it is assumed that typically all sensors possess unlimited field of view to observe the target states. This is quite restrictive since practical sensors have limited sensing range (LSR). In a large-scale sensor network, the field of view of the sensors is typically partially overlapped or even non-overlapped. Distributed filtering based on sensors with LSR has only been addressed in a few works, for example, Qin et al., 20 Yu et al., 21 Olfati-Saber and Sandell, 22 Ilic et al., 23 and Ma et al., 24 which are reviewed briefly in the following. In this article, we consider the problem of distributed filtering in sensor network with limited sensing range where no fusion center exists and each node only exchanges information with its neighbors.
Related work
Nowadays, the use of multi-sensors for state estimation is mainly focused on the processing of information obtained from long-range sensors, such as radars and sonars. However, sensor networks are composed of nodes with a limited sensing range, which is faced with the problem of limited perception. The main challenge is that not all sensors can observe the target at every time in the whole network with a limited sensing range. However, it was rarely studied in the existing work. Qin et al. 20 proposed a filtering algorithm based on random Gossip consensus strategy for the case of limited observability nodes and time-varying network topology. Aiming at the limited sensing range of nodes in sensor networks, the distributed consensus tracking of maneuvering targets was studied in Olfati-Saber and Sandell. 22 By establishing the target switching model, the target is always kept in a rectangular region and a hierarchical hybrid architecture was proposed to estimate the target. Considering the same problem, a decentralized adaptive distributed target tracking algorithm was proposed in Ilic et al. 23 It is used to dynamically adjust the consensus gain by passing additional binary information between adjacent nodes. Considering the distributed tracking problem of heterogeneous networks with limited sensing range and limited communication range, a distributed Kalman filtering algorithm based on Gossip was designed in Ma et al. 24 The information-weighted consensus filter, 25 which is developed for distributed camera networks, has reasonable performance in the presence of naive nodes, that is, some nodes do not obtain the observations of the target because of the limited field of view of the cameras. Lian et al. 26 addressed limited sensing range and target mobility on the information flow topology by designing a novel distributed Kalman consensus filter with an information-weighted consensus structure for random mobile target estimation in continuous time. In order to better understand the research progress of distributed filtering in the field of LSR, Table 1 compares the existing methods according to six aspects.27–29
Comparison of existing methods for distributed filtering with limited sensing range.

As shown in Table 1, the existing methods focus on estimation consensus. However, the optimal (estimation accuracy) is ignored. Therefore, for sensor networks with limited sensing range, this article proposes distributed filtering based on linear minimum mean square error (LMMSE) criterion to realize estimation consensus and optimal filter.
Our contributions
Motivated by the works above, a novel distributed filter based on LMMSE criterion (LMMSE-F) with LSR is proposed. Furthermore, the stability and computational complexity for the proposed LMMSE-F are discussed as well. The major contributions of this work are summarized as follows:
In order to deal with the LSR in sensor networks, a distributed filter based on LMMSE criterion is proposed that achieves consensus and optimal filter. Two types of strategies based on LMMSE criterion are proposed, that is, LMMSE-F based on measurement and LMMSE-F based on estimate, according to the differences of the neighbor sensor information received by the sensor. In this way, by iterations of communication between neighbors, each node individually computes a global estimate of the state.
Stability analysis with regard to consistency and computational complexity is investigated for the proposed LMMSE-F.
The effectiveness of the proposed algorithms is evaluated on target tracking. Simulation results illustrate that the LMMSE-F outperforms the existing distributed Kalman filtering algorithm in Olfati-Saber6,7 when the sensors are with LSR.
Problem formulation
Consider the following typical discrete-time linear dynamic system observed by N sensors with the same sampling rates


where k is the discrete-time index; the superscript i is the sensor node index; N is the number of sensor nodes in a given network;
The topology of the sensor network of the above N sensor nodes is represented by an undirected graph

The topology of a sensor network with 10 nodes: (a) Random mesh topology (RMT). (b) Full mesh topology (FMT).
In previous studies, it is often assumed that the sensing range of sensor nodes is infinite and there is no problem with the undetectable target, that is, the sensor node can obtain the measurement of the target at every time. However, in practical, sensors have an LSR for relatively large areas. If the sensing range of the sensor is exceeded, the target cannot be detected and the measurement information of the target cannot be obtained. This brings new challenges to the distributed filtering of sensor networks. Therefore, the distributed filter under an LSR is studied in this article. Assume that each sensor has a circular sensing range with the radius r. Due to the LSR, the measurement model of the target can be rewritten as

where
A sensor network with LSR is depicted in Figure 2. Then, we can see from Figure 2 that sensor 7 has measurements for a period of time at the beginning and last; sensor 8 has measurements for a period of time at the middle, whereas sensor 4 has no measurements for all time.

A sensor network with LSR.
In the past few years, distributed filtering has been extensively studied under the consensus strategy in which each node only communicates with its neighbors. However, the existing methods mainly focus on achieving estimation consensus through different consensus strategies, but the estimation accuracy is rarely discussed. In this article, we consider distributed filtering in sensor network based on LMMSE criterion. It is the optimal estimator in the sense of LMMSE and can also achieve estimation consensus. Two types of distributed filtering based on LMMSE criterion are proposed, that is, LMMSE-F based on measurement and LMMSE-F based on estimate.
Preliminaries
Before further discussion, we will give a brief summary to LMMSE estimation and distributed optimal estimation fusion first in this section.
LMMSE estimation
The optimal estimate

with MSE matrix

where
If

A special case of this for uncorrelated


where
Based on orthogonal projection principle, the LMMSE estimator using two arbitrary


where
Distributed optimal estimation fusion
Denoted by

In this article, two types of distributed filtering in sensor network under the LMMSE criterion will be proposed, that is, LMMSE filter (LMMSE-F) based on measurement and LMMSE-F based on estimate. For LMMSE-F based on measurement, each sensor node collects measurements from its neighbors and then the optimal state estimate of each sensor node is provided by the LMMSE estimation. For LMMSE-F based on estimate, each sensor node collects state estimate and error covariance matrix based on the local Kalman filter from its neighbors, and then the optimal state estimate of each sensor node is provided by the distributed optimal estimation fusion.
Two types of LMMSE filter
In this section, according to the difference of receiving neighbor node data information, two types of LMMSE-F will be discussed.
LMMSE filter based on measurement
Let

where
The pseudo measurement equation of the augmented measurement of sensor i can be written as

where




Given











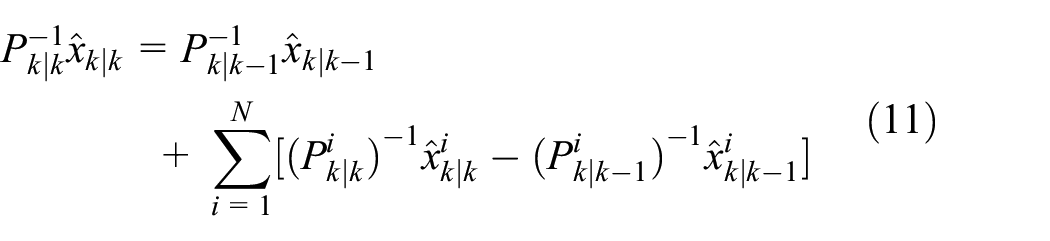
The detailed derivation for all involved quantities is as follows. The state estimate equation (18) and its covariance equation (24) of sensor i are given by


where






The information form of equation (26) can be written as

Also equation (31) can be rewritten as

Then, the LMMSE estimator of the sensor i,


or

Therefore, the LMMSE-FM with LSR can be summarized as in Algorithm 1 (A1).

LMMSE filter based on estimate
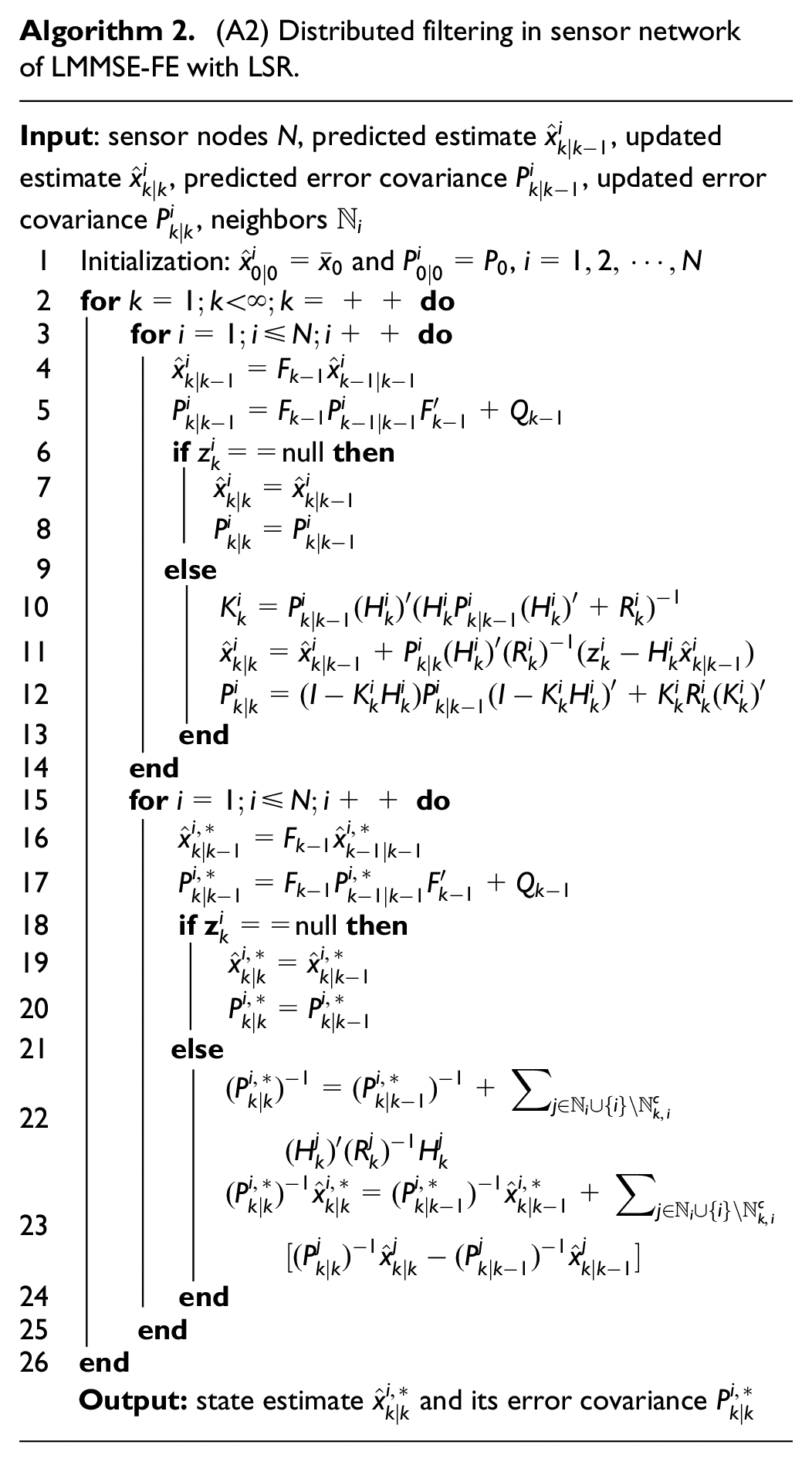
The core idea of LMMSE-F based on estimate (LMMSE-FE) is each sensor performs the local Kalman filter separately first. Then, each sensor node sends the information (e.g.
Then, the LMMSE estimator of the sensor i,
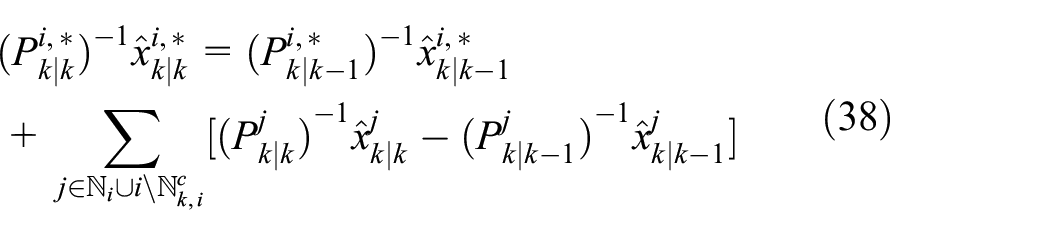

This LMMSE-FE with LSR can be summarized as in Algorithm 2 (A2).
Illustrative examples
In this section, we verify the effectiveness of the proposed algorithms. For this purpose, two examples are provided and all results are averaged over 500 Monte Carlo runs. The target motion in a two-dimensional plane is considered and the target state is denoted as
The target state transition matrix and sensor measurement transition matrix are given as follows

The process noise statistics are chosen as follows

The initial state of the target is

Let us refer to classical Kalman filter (KF) with no exchange of measurements or estimates as Algorithm 0 (A0). We also refer to the Kalman consensus filter consensus on measurements (KCF-CM),
6
the Kalman consensus information filter consensus on estimates (KCF-CF),6,7 and the optimal discrete-time Kalman consensus filter (OKCF)
8
as Algorithm 3 (A3), Algorithm 4 (A4), and Algorithm 5 (A5), respectively. The two mesh topologies in Figure 1 are considered in this article. For random mesh topology (RMT) and full mesh topology (FMT), we set
Note that according to Algorithm 1, node i sends the message
To measure the disagreement of the estimates, we use the following metric

where
Example 1: A1 vs A3, A2 vs A4, and A2 vs A5, without LSR
In this example, we compare the LMMSE-FM with KCF-CM, LMMSE-FE with KCF-CE, and LMMSE-FE with OKCF to verify the performance of the proposed method for an RMT without LSR and the results are shown in Figures 3 and 4. In Figure 3, the root mean squared errors (RMSE) of each sensor are plotted over time. The disagreement of estimates (DoE) is shown in Figure 4. In Figures 5 and 6, the same estimation process is repeated, but for an FMT.
The RMSE of different algorithms for RMT without LSR: (a) LMMSE-FM, (b) KCF-CM, (c) LMMSE-FE, (d) KCF-CE,(e) OKCF, and (f) KF.

DoE of different algorithms for RMT without LSR.

The RMSE of different algorithms for FMT without LSR: (a) LMMSE-FM, (b) KCF-CM, (c) LMMSE-FE, (d) KCF-CE,(e) OKCF, and (f) KF.

DoE of different algorithms for FMT without LSR.
For an RMT, from Figure 3, it can be seen that the RMSE rough range of the LMMSE-FM, KCF-CM, LMMSE-FE, KCF-CE, OKCF, and KF is in [0.57,0.8], [1.05,1.3], [0.57,0.8], [0.6,1.0], [0.7,1.2], and [1.15,1.38], respectively. It is observed that the LMMSE-CM performs better than KCF-CM, the LMMSE-CE performs better than KCF-CE and OKCF, and the LMMSE-CM has the same performance as LMMSE-CE. A quick look at Figure 4 reveals that the ranking of the DoE is
For an FMT, from Figure 5, it can be seen that the RMSE rough range of the LMMSE-FM, KCF-CM, LMMSE-FE, OKCF, and KF is in [0.47,0.53], [1.07,1.32], [0.47,0.53], [0.5,0.97], [0.8,0.97], and [1.15,1.38], respectively. From Figure 5(a) and (c), it can be also seen that all sensors have the same estimation error for LMMSE-FM and LMMSE-FE, that is, the disagreement of the estimate is 0. It means that the LMMSE-FM and LMMSE-FE can completely achieve estimation consensus, that is, all sensors have the same state estimation. These results can be seen in Figure 6. From Figure 6, we have the same order as in Figure 4. Moreover, by comparing Figures 3 and 5 as well as Figures 4 and 6, respectively, it can be seen that the FMT is better than the FMT in RMSE and DoE.
Example 2: A1 vs A3, A2 vs A4, and A2 vs A5, with LSR
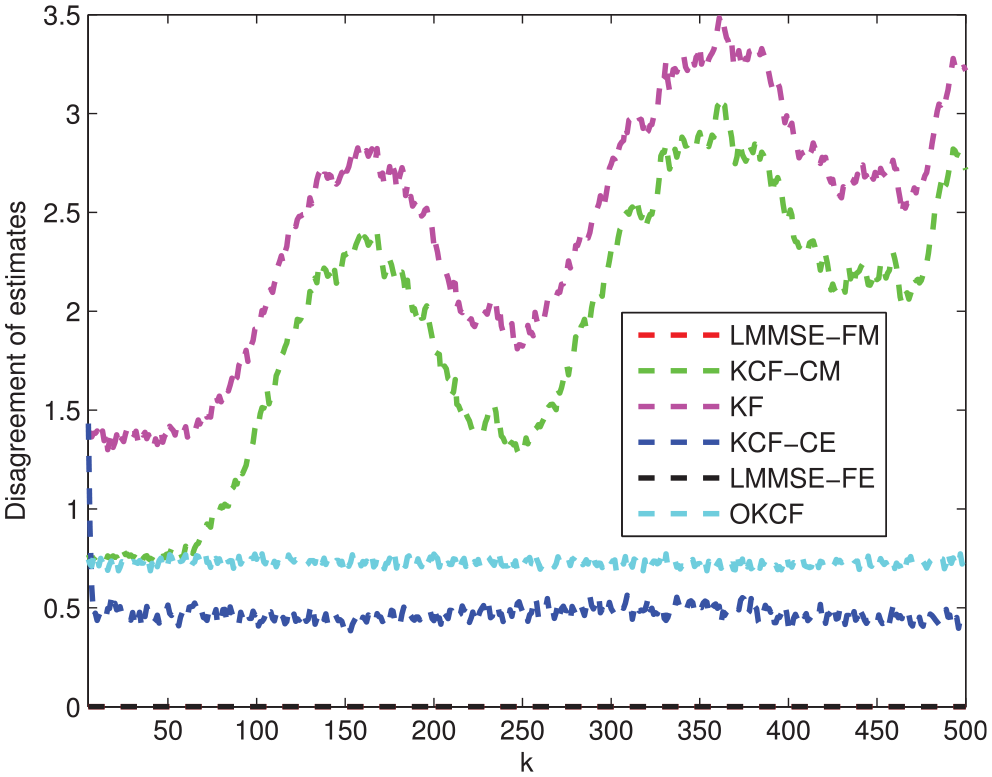
In this example, we compare the LMMSE-FM with KCF-CM, LMMSE-FE with KCF-CE, and LMMSE-FE with OKCF to verify the performance of the proposed method for an RMT with LSR and the results are shown in Figures 7 and 8. The RMSEs and DoEs of LMMSE-FM, KCF-CM, LMMSE-FE, KCF-CE, OKCF, and KF are plotted for an RMT in Figures 7 and 8, respectively. The similar indicators are shown in Figures 9 and 10, but for an FMT.

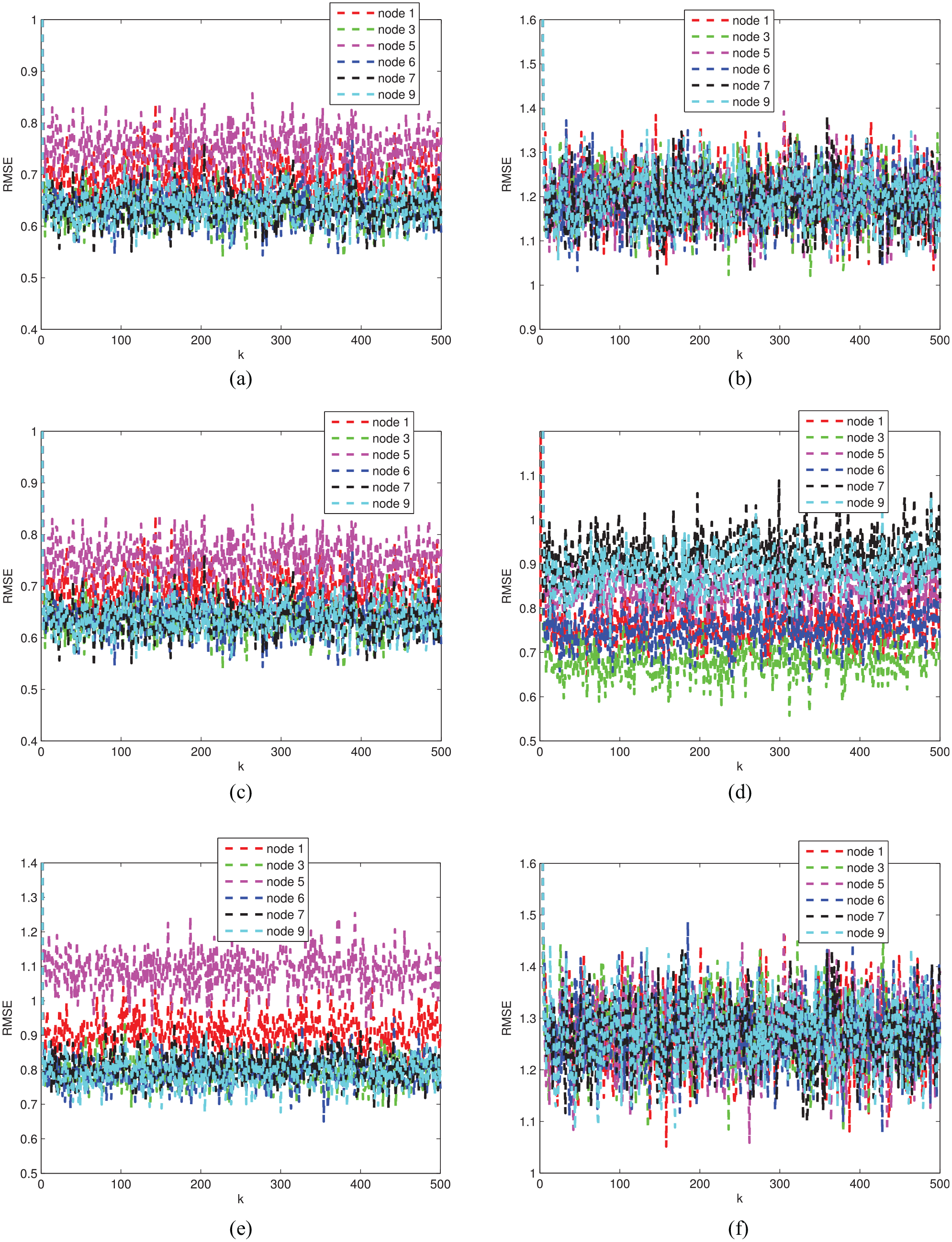
The RMSE of different algorithms for RMT with LSR: (a) LMMSE-FM, (b) KCF-CM, (c) LMMSE-FE, (d) KCF-CE, (e) OKCF and (f) KF.

DoE of different algorithms for RMT with LSR.

The RMSE of different algorithms for FMT with LSR: (a) LMMSE-FM, (b) KCF-CM, (c) LMMSE-FE, (d) KCF-CE, (e) OKCF and (f) KF.
DoE of different algorithms for FMT with LSR.
From Figure 7, it can be seen that when the sensor network is with LSR, the measurement of the target cannot be obtained at some time, which will cause a certain degree of error fluctuation, that is, the RMSE of the LMMSE-FM, LMMSE-FE, KCF-CE, and OKCF fluctuates little, but it has a great influence on the RMSE of KCF-CM and KF. In addition, it can be seen from Figure 7 that the estimation accuracy of the LMMSE-FM and LMMSE-FE is the highest, whereas the estimation accuracy of KCF-CE, OKCF, KCF-CM, and the KF is the worst. From Figure 8, the ranking of the DoE is
The same results for an FMT are shown in Figures 9 and 10. Furthermore, all sensors of LMMSE-FM and LMMSE-FE have the same state estimation error for an FMT. By comparing Figures 7 and 9 as well as Figures 8 and 10, respectively, it can be seen that the FMT is better than the FMT in RMSE and DoE.
Performance analysis
To further verify the effectiveness of the proposed algorithms in terms of estimation accuracy, filter consensus, and computational cost, we made a quantitative analysis of these algorithms. The results are shown in Tables 2–4. Table 2 lists the RMSEs and DoEs of different algorithms without LSR in two types of networks (e.g. RMT and FMT). Table 3 lists the same simulation scenario but for LSR. The computation costs are given in Table 4.
Algorithms performance without LSR.

LSR: limited sensing range; RMT: random mesh topology; RMSE: root mean squared errors; DoE: disagreement of estimates; FMT: full mesh topology.
Algorithms performance with LSR.

LSR: limited sensing range; RMT: random mesh topology; RMSE: root mean squared errors; DoE: disagreement of estimates; FMT: full mesh topology.
Computational cost(s).

RMT: random mesh topology; FMT: full mesh topology; LSR: limited sensing range.
From Tables 2 and 3, we can see that, first, the RMSE and DoE of the FMT are smaller than those of the RMT. Second, in FMT, the filter based on LMMSE criterion can fully achieve consensus of all sensor state estimation, that is, the state estimation of all sensor nodes is the same. Third, the performance of the algorithms based on LMMSE criterion is better than that based on KCF criterion. Fourth, the performance of the algorithms without LSR is better than that with LSR. Fifth, no matter what kind of network it is and whether there is LSR or not, the ranking of DoE and RMSE is always
Conclusion
Distributed filtering in sensor network based on LMMSE criterion with LSR has been studied in this article. To achieve the optimal estimation and consensus, two types of distributed filtering based on LMMSE criterion are proposed, that is, LMMSE-F based on measurement and LMMSE-F based on estimate. For LMMSE-FM, each sensor node collects measurement from its neighbors and then the optimal estimate is provided by the LMMSE estimation. For LMMSE-FE, each sensor node performs Kalman filtering locally and then collects state estimate and error covariance from its neighbors. Finally, distributed optimal estimation fusion for each sensor node is provided. We presented a Lyapunov-based stability analysis of the LMMSE-F and computational complexity. The random and full mesh topologies are used to verify the effectiveness of these two proposed methods. Numerical experimental results show that the filter based on LMMSE criterion has a superior performance in comparison with the filter based on KCF criterion.
Footnotes
Appendix 1
Handling Editor: Yanjiao Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the Scientific Research Foundation for the High-Level Introduction Personnel in Anhui University of Science and Technology (2021yjrc40).