
Abstract
This paper focuses on the trajectory planning of glue spraying on shoe sole sidewalls, addressing issues such as low spraying efficiency, high health risks from adhesives, low spraying precision. A method based on cutting plane slicing and multi-scale neighborhood normal vector estimation (TP-MNVE) is proposed. Curvature features and tensor voting are introduced to remove point cloud noise. Boundary search calipers are used to search heel and toe, cutting plane slicing from heel to toe provides an extended line description (XLD) and identifies the highest points on both sides of the contour curves. These highest points, combined with the angle threshold of the spraying process, determine the glue spraying trajectory on the sidewalls. The surface variation of the shoe sole sidewall is incorporated to develop a multi-scale neighborhood weighted normal vector estimation function, yielding the normal vectors of trajectory points. Experimental results on sample shoe soles show that the number of denoised point clouds is reduced by 16,990, with a signal-to-noise ratio (SNR) of 42.156 and entropy of 3.19 × 10^5, outperforming Laplacian, bilateral, and median filtering methods. Boundary segmentation of the toe and heel is accurate, and the cutting plane extraction for the glue spraying trajectory is stable. The trajectory accuracy is 0.931 mm, the root mean square (RMS) of the deviation angle between the estimated and theoretical normal vectors is 0.66°, processing time is less than 1.6 s. This method solves the challenges of glue spraying for various shoe sole styles and promotes automation in the textile industry.
Keywords
Introduction
In 2022, China’s annual production of sports footwear reached 1.439 billion pairs. The market size is expected to grow by 13.2% year-on-year in 2023. Projections indicate that by 2025, the proportion of individuals regularly engaging in physical exercise will reach 38.5%, driving a significant increase in the demand for sports footwear. The cold bonding process employs specialized chemical adhesives to bond the shoe sole to the upper under ambient temperature conditions. This technique integrates elements of other footwear manufacturing processes, ensuring the structural integrity of the shoes while simultaneously enhancing production efficiency.
Footwear manufacturing is an important sector of the textile. In the production of shoe soles, spraying adhesive is a key process that bonds the sole to the textile upper. The textile upper is typically made from various types of mesh fabric, which are required to have certain breathability and water permeability. As a result, there are challenges in bonding the textile upper to the sole. Cold adhesive shoe manufacturing is a typical labor-intensive industry, with most workstations relying on manual or semi-automated operations, resulting in low production efficiency and poor working conditions. The bonding of shoe soles and shoe uppers using water-based and vulcanized adhesives releases toxic fumes, posing serious health risks to workers and hindering the development of the footwear industry. The use of robotic arms for glue spraying can effectively address issues such as adhesive waste, unstable spraying quality, and low efficiency. 1 The key to robotic arm glue spraying is the trajectory planning for the shoe sole sidewall. Existing studies have used robotic teaching, 2 CAD models, 3 and shoe sole point cloud data4–6 to obtain spraying trajectories. However, teaching and CAD models cannot address issues such as shoe sole deformation and size changes. By using 3D vision, the spatial position and normal vector of the glue spraying trajectory can be obtained online, bringing innovative changes to shoe sole glue spraying. However, current 3D vision-based glue spraying trajectory planning only considers a single characteristic of the shoe sole, without incorporating the specific features of the spraying area and the glue spraying industry. This leads to issues such as material wastage, unstable spraying quality, and low efficiency.
To meet the manufacturing requirements of sports shoes, the deviation in glue spraying trajectories should not exceed 1.0 mm. The glue spraying trajectories for different sole styles depend on the boundary geometric features of the sole contours, with the spraying area primarily originating from the sidewall regions. As an online detection method for shoe soles, 3D vision effectively addresses issues such as multiple styles and shoe sole deformation.7,8 The glue spraying unit for sports shoe soles is shown in Figure 1. The glue spraying area on the shoe sole sidewall has characteristics such as small spraying area, large curvature fluctuations, and high precision requirements for boundary spraying, making 3D vision-based trajectory planning for glue spraying more complex. Semantic segmentation methods have been used to extract glue spraying trajectories for multiple shoe sole styles,
9
but shoe sole styles change rapidly, and the constructed training sets cannot keep up with the timeliness of shoe sole updates. The Canny edge detection method has been used to obtain the outermost boundary contour of the shoe sole and generate spraying trajectories by evenly offsetting the contour lines.10,11 However, Canny edge detection can only capture the outermost boundary contour of the shoe sole, which is not always the top edge, and the evenly offset trajectories cannot accommodate the changes in the glue spraying surface of the shoe sole.12,13 In summary, current 3D vision-based glue spraying trajectory planning for shoe soles does not meet the production demands for style updates. The glue spraying unit for sports shoe sole.
The acquisition of shoe sole point cloud data is influenced by external environmental factors, measurement equipment defects, the reflective characteristics of the shoe sole surface, and point cloud 3D reconstruction algorithms, resulting in noise such as scattering, blockiness, and spikes during the data acquisition process.14,15 Mainstream point cloud filtering methods cannot effectively handle both large-scale and small-scale noise, 16 and they are sensitive to input point cloud data, often failing to preserve the geometric features of the shoe sole while removing noise. 17 To solve the problem of not being able to remove shoe sole noise as a whole, the noise in the shoe sole point cloud is divided into large-scale noise outside the sole’s boundary and small-scale noise within the sole. Tensor voting is used to differentiate between boundary noise and external noise, and the shoe sole’s internal noise is removed by combining the curvature features of the shoe sole sidewall.18,19 The top edge of the shoe sole sidewall directly reflects the contour features of the glue spraying area. Boundary perception and deep learning segmentation methods are used to extract the boundary of the shoe sole sidewall point cloud data,20,21 but these methods require the preparation of a training set in advance and cannot adapt to the frequent changes in shoe styles. To address the efficiency problem of shoe style switching, a cutting plane method is used to extract the boundary contour. 22 Obtain the XLD contour from the intersection of the cutting plane and the point cloud. Based on curvature variations, divide the XLD into multiple segments, and determine the spray trajectory points at the locations where the angle difference between adjacent segments is maximal. In addition to the spatial position in the robotic arm guidance task, the normal vector estimation of the point cloud is also used as essential data. The spraying trajectory posture is constructed using a rotation matrix based on the normal vector of the shoe sole sidewall spraying area.2–25 The shoe sole spraying area has a relatively large curvature, and when the neighborhood search radius is small, the number of neighboring point clouds is limited, making it difficult to accurately estimate the normal vector in areas with missing point clouds. When the neighborhood search radius is large, the number of neighboring point clouds increases, offering some resistance to point cloud loss, noise, and outliers. However, an excessively large search radius cannot accurately reflect the true shape of the original spraying area. 26
Based on the above, this paper proposes a glue spraying trajectory planning method TP-MNVE. The main research contents of this paper are as follows: (1) Use tensor voting to remove large-scale point cloud noise and introduce the shoe sole sidewall curvature factor to eliminate small-scale noise. A quantitative comparison is made with Laplacian filtering, bilateral filtering, and median filtering in terms of SNR, entropy, and efficiency. (2) Define a grayscale contrast threshold to develop a search caliper for segmenting the boundaries of the heel and toe. Create a cutting plane for vertical cutting of the shoe sole to obtain the XLD of the shoe sole. From the edge regions on both sides of the contour curve, extract the highest points as reference markers. Using the highest points as references, define an angle threshold for the glue spraying process to determine the spraying trajectory. (3) Introduce the surface variation of the shoe sole sidewall and establish a multi-scale neighborhood weighted normal vector estimation function to estimate the normal vector of the shoe sole sidewall glue spraying area. Compare the results with normal vector estimation using principal components analysis (PCA) with fixed and adaptive neighborhoods, and perform glue spraying simulations and experiments on different shoe sole styles.
Trajectory planning of shoe sole glue spraying
Preprocessing of shoe sole point cloud
Large scale denoising based on tensor voting
The three-dimensional point cloud of the shoe sole is represented by a symmetric positive semi-definite matrix

The geometric features of the sampled points can be classified into three categories as follows: when
Small scale denoising based on curvature features
The point cloud of the shoe sole after removing large scale noise is denoted as

Suppose

Establish the minimum constraint criterion for the distance of each the
Define the minimum-distance constraint function for the

The constraint gives the normal vector

By formula (6), the curvature
Evaluation for shoe sole point cloud denoising
Accuracy, simplicity, and efficiency are the evaluation metrics for shoe sole point cloud denoising. Existing evaluation functions cannot balance all three. To objectively assess the denoising effect, SNR and entropy are introduced to evaluate the denoising effect of the shoe sole point cloud. Let the shoe sole point cloud after small scale denoising based on curvature features be denoted as

Entropy theory describes the characteristic information of the denoised shoe sole point cloud. The greater the entropy in the shoe sole point cloud, the larger of information and the more detailed features. The entropy theory

The entropy theory
The sum of entropy
Trajectory extraction of shoe sole glue spraying
Search for heel and toe
A search caliper, adapted to the heel and toe search length and width, was established in the image coordinate system to define the start and endpoint of the segmentation. The search principle for the heel and toe boundary is illustrated in Figure 2. The search caliper primarily consists of the search start point, the search area width, the search length, and the search width of a single caliper. Since the shoe sole does not have a fixed placement area, binary large object (Blob) analysis was employed to determine the center point of the shoe sole contour and the shoe sole length. Based on these measurements, the location of the search caliper was determined. Due to the curvature of the heel and toe, the minimum point of the heel was selected as the starting point, and the maximum point of the toe was identified as the terminal point. Search principle of heel and toe boundary.
In the search length direction, the search region width is projected from a two-dimensional image to a one-dimensional image. The segmentation principle of projection threshold is shown in Figure 3. The average pixel value of search caliper region image in the projected image is obtained, and the edge lines that do not meet the contrast threshold are eliminated using a contrast threshold. Points with higher contrast are selected as the search points for the caliper. A line passing through the minimum search point of the heel caliper, parallel to the search region width direction is established as the heel boundary; a line passing through the maximum search point of the toe caliper, parallel to the search region width direction is established as the toe boundary. The contrast of the projection data is Segmentation principle of projection threshold.

Setting for caliper parameter.

Note: The bold indicates the optimal selected parameters.
In conclusion, the search parameters are set as follows: for the heel, the search area width is 80.00 mm, the number of search calipers is 20, the search length is 25.00 mm, the single caliper search width is 3.00 mm, and the contrast threshold is 0.20; for the toe, the search area width is 60.00 mm, the number of search calipers is 20, the search length is 35.00 mm, the single caliper search width is 5.00 mm and the contrast threshold is 0.30.
Trajectory planning of shoe sole sidewall
Since the consistency of the orientation of the shoe sole can not be guaranteed, establish the smallest external rectangle of the shoe sole, establish the coordinate Principle of acquisition glue spraying trajectory points. (a) Tanget plane cutting (b) point cloud intersection of tenget plane (c) tanget plane projected of yz plane (d) curvature segmentation.
The projection of the XLD contour curve obtained by cutting the shoe sole with the cutting plane in the YZ plane is shown in Figure 4(c). The highest point 
In summary, the XLD contour curve of the shoe sole point cloud is initially obtained using a cutting plane. The highest point along the contour curve is then identified. Using this highest point as a reference, an angle threshold is applied to search for and determine the glue spraying trajectory of the shoe sole.
Normal vector estimation of glue spraying
The normal vector of the shoe sole adhesive spraying points is estimated by fitting the plane of the trajectory point neighborhood point cloud using PCA, incorporating the surface variation degree. However, the accuracy of the normal vector estimation is affected by different neighborhood search radii. When the neighborhood search radius is small, the normal vector cannot be accurately estimated in regions with missing point clouds. When the neighborhood search radius is large, it has some resistance to point cloud missing and noise, but an excessively large search radius cannot accurately reflect the true shape of the adhesive spraying surface. Therefore, a multi-scale normal vector estimation approach is used, where the normal vector estimation results with different search radii are weighted to increase robustness against the influence of point cloud missing and noise. The principle of multi-scale neighborhood search is shown in Figure 5. Principle of multi-scale neighborhood search.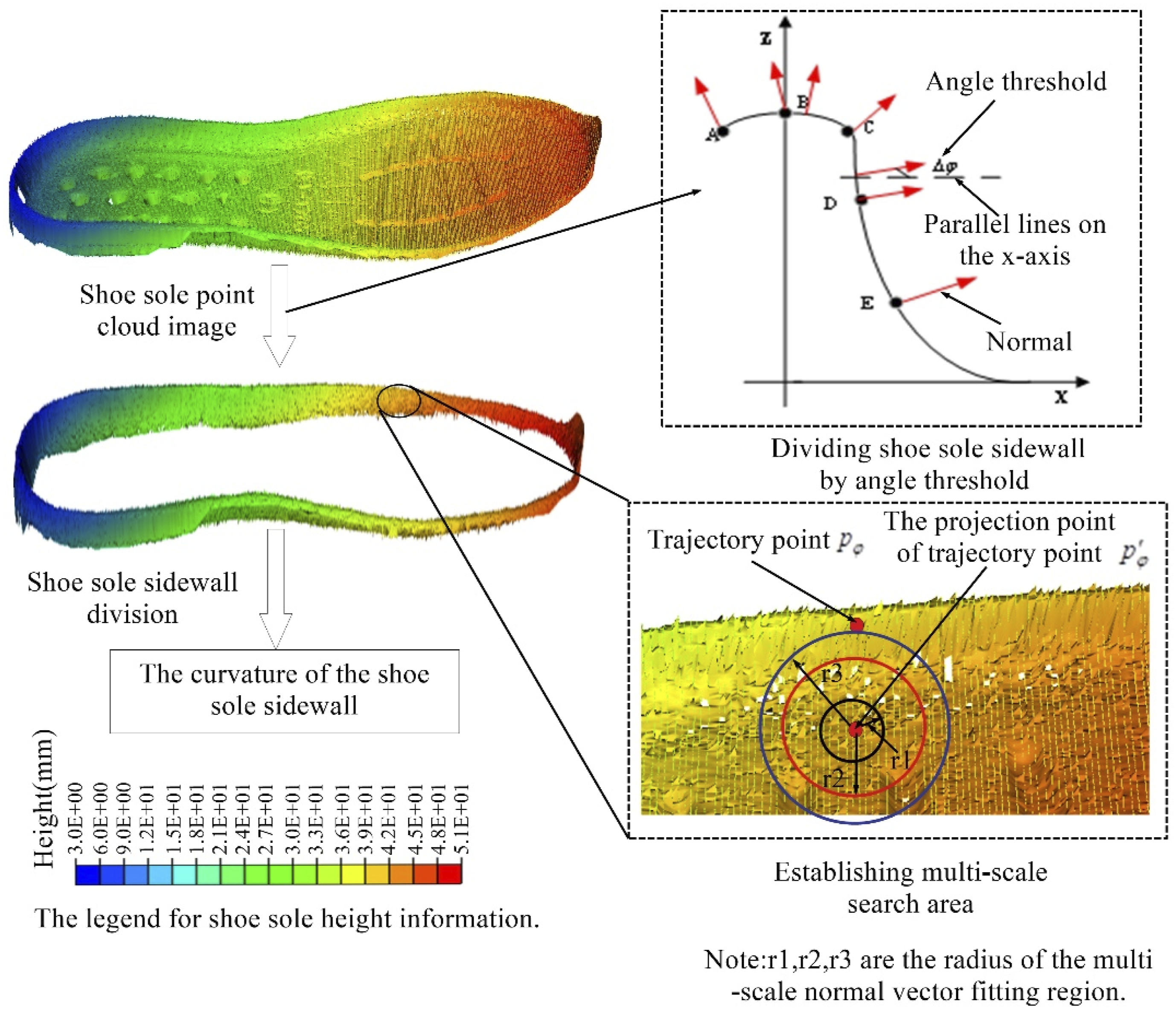
The boundary between the midsole and sidewall regions of the shoe sole is determined using an angle threshold. The sidewall of the shoe sole is then segmented based on this boundary line. Obtain the shoe sole sidewall region based on the signed surface variation (SSV).
29
The trajectory point 

Trajectory evaluation
Obtain the point cloud of the sample shoe sole by 3D scanner, and the shoe sole and upper bonding trajectory line is obtained by point cloud inversion. Calculate the Euclidean distance between the glue spraying trajectory and the bonding trajectory, take the average error as the evaluation criterion for trajectory accuracy. The average error is
The angle between the estimated normal vector and the theoretical normal vector is the normal deviation angle. The RMS of the estimated normal vector deviation angle is used to evaluate the accuracy of the estimated normal vector. The larger the RMS, the greater the error in the estimated normal vector. The RMS of normal deviation angle is
Deviations in the shoe sole glue spraying trajectory are permissible provided that the average error towards the inner side of the sole, based on the shoe upper edge of the shoe sole sidewall as the reference, is controlled within 1.0 mm and the RMS of the normal vector deviation angle is less than 1.5. If these conditions are met, the 3D camera will recapture the sole’s point cloud to compute the glue spraying trajectory. Otherwise, automated glue spraying will not be performed on the sole, and it will be handled manually.
Experiment and analysis of shoe sole spraying
The core hardware parameters of the shoe sole glue spraying experimental platform.
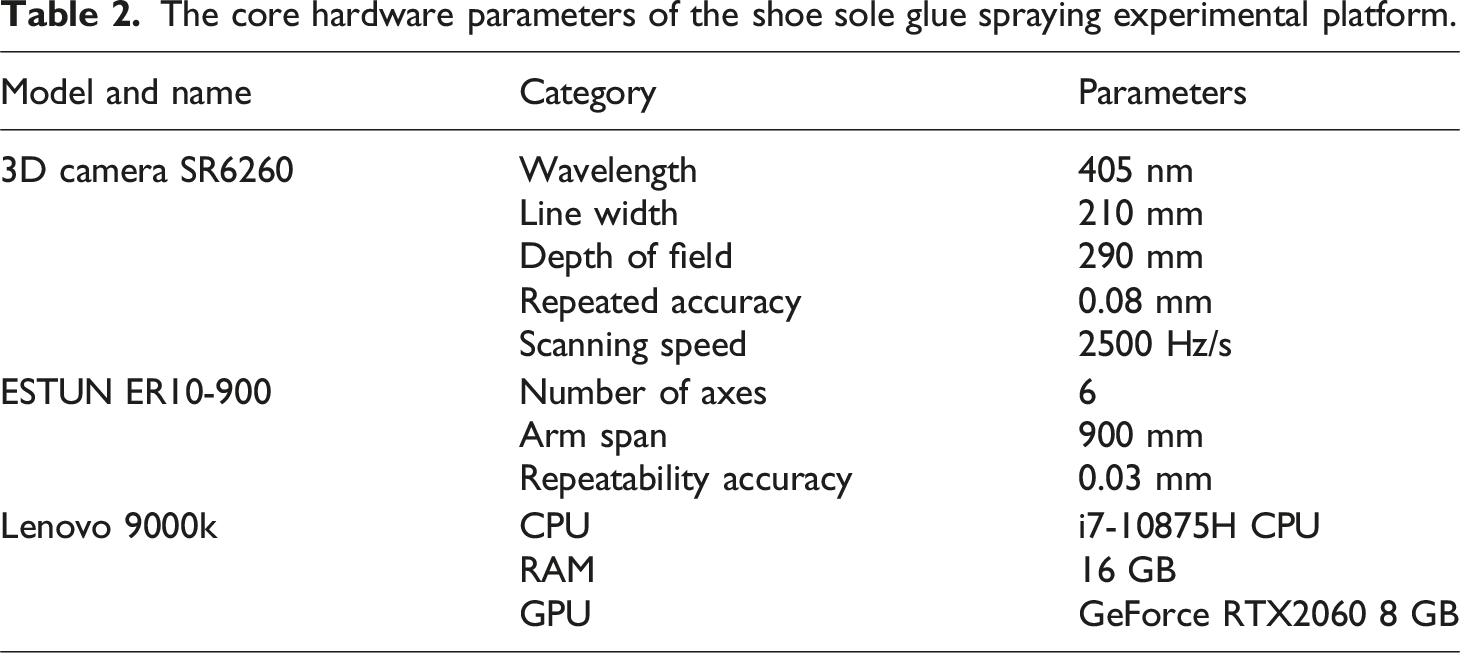
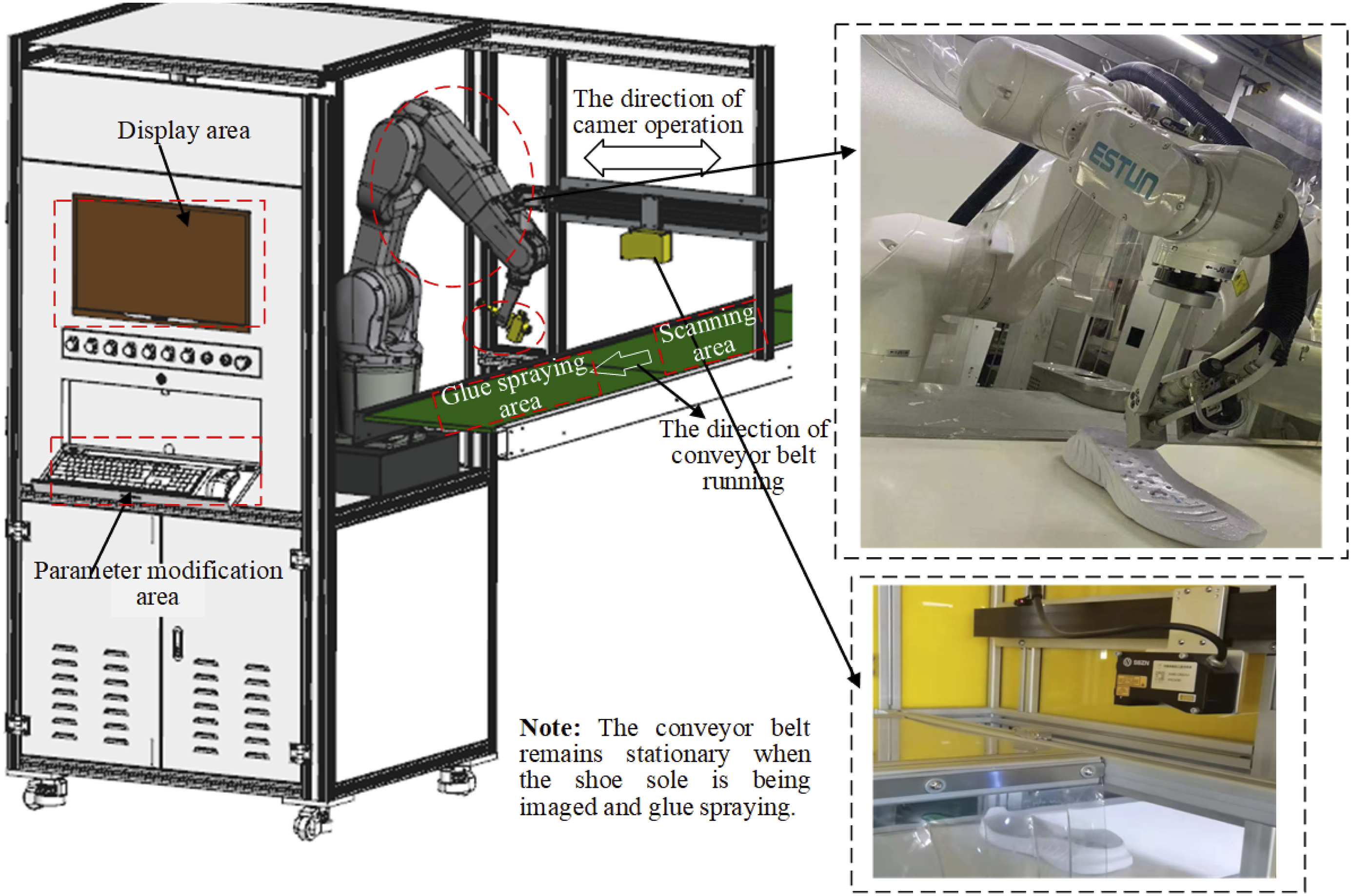
The experiment platform of shoe sole glue spraying.
Denoising experiment
The large scale and small scale noise is removed using a step-by-step method. Experimental process of shoe sole denoising is shown in Figure 7, the color codes in Figure 7 are consistent with those in Figure 5. The 3D camera captures the shoe sole point cloud is shown in Figure 7(a). The large scale noise of the shoe sole is extracted is shown in Figure 7(b). The noise is subsequently removed is shown in Figure 7(c). The shoe sole data after removing the large scale noise still contains small scale noise mixed within the point cloud is shown in Figure 7(d). In regions (1) and (2), there are scattered noise points with irregular distribution in the laser lines, which affect the normal vector estimation of the shoe sole sidewall glue spraying trajectory points. Small scale noise is removed based on curvature characteristics is shown in Figure 7(e). Through point cloud denoising, the large scale noise is completely removed, and the scattered small noise in the laser lines is mostly eliminated, resulting in valid shoe sole point cloud data, which lays the foundation for extracting the glue spraying trajectory. Experimental process of shoe sole denoising. (a) Shoe sole point cloud (b) large scale noise (c) remove large scale noise (d) remove small scale noise (e) denoising of shoe sole point cloud.
Comparison of denoising results.

Trajectory planning of glue spraying
Segmentation boundary of heel and toe
The 3D camera is set to capture images from the toe to the heel direction. In the camera coordinate system, the heel data is calibrated to be smaller than the toe data. The denoised shoe sole point cloud data is converted into a 16-bit depth map, the shoe sole point cloud is rotated to ensure that the heel and toe axes of the shoe sole are aligned with the direction of the 3D camera. According to the caliper parameters in Table 1, the heel search area width is set to 80.00 mm, search length to 25.00 mm, individual caliper search width to 3.00 mm, and the contrast threshold to 0.2. The single caliper projection search for the heel is shown in Figure 8(a). The toe search area width is set to 60.00 mm, search length to 35.00 mm, individual caliper search width to 5.00 mm, and the contrast threshold to 0.3. The single caliper projection search for the toe is shown in Figure 8(b), the color codes in Figure 8 are consistent with those in Figure 5. Projection data of single caliper. (a) Projection data of single heel caliper (b) projection data of single toe caliper.
Through the projection data of single caliper in Figure 8. Both the heel and toe boundaries are extracted using 20 search calipers. The results of heel and toe search boundary are shown in Figure 9. Based on the shoe sole depth map of Figure 9(a), Blob analysis is used to determine the center of the shoe sole contour and the sole length. Taking the shoe sole contour center as a reference, search calipers for the heel and toe are established by moving half the length of the shoe sole in both the heel and toe directions is shown in Figure 9(b). 20 search calipers are evenly distributed along the search width direction for both the heel and toe. 20 caliper search points are obtained for both the heel and toe is shown in Figure 9(c). A line passing through the minimum search point of the heel caliper, parallel to the search area width direction, is established as the heel boundary. Similarly, a line passing through the maximum search point of the toe caliper, parallel to the search area width direction, is established as the toe boundary. The heel and toe boundary segmentation is shown in Figure 9(d). The heel and toe boundary search experiment indicates that the caliper search method is stable and accurate, it is suitable for heel and toe positioning and segmentation. The results of heel and toe search boundary. (a) Depth map of shoe sole (b) establishment of search caliper (c) result of search caliper (d) boundary segmentation.
Trajectory of glue spraying
The cutting range of the shoe sole is limited based on the boundary of the heel and toe. The cutting plane is then established from the direction of the heel to the toe, and the glue spraying trajectory is extracted, as shown in Figure 10. Given that the contour curves of the toe and heel of different shoe sole styles do not vary significantly, and the design width of both the heel and toe is within 30 mm. So the boundary line of heel and toe is used as the reference to set the cutting area of heel and toe as 30 mm, the interval is 3 mm for cutting, and the spacing of the cutting plane in the middle of the shoe sole is 5 mm, and the cutting plane is established, as shown in Figure 10(a), extract the XLD cutting curve of the cutting plane and the shoe sole is shown in Figure 10(b). Cyclically cutting the shoe sole based on the set cutting area and cutting plane spacing. Extracted the highest points of shoe sole sidewall is shown in Figure 10(c). The trajectory point spacing is relatively dense at the heel and toe is shown in Figure 10(d) and (e). In Figure 10(b), the XLD contour curve is divided into region A and region B by the midpoint of the X-axis of the XLD contour curve. Point P1 is the highest point of region A, and point P4 is the highest point of region B. Using formula (10), the maximum angle threshold search is performed for points P1 and P4, resulting in points P2 and P3 as the actual glue spraying trajectory points. Using formula (10), the maximum angle threshold search is performed on the highest points of the shoe sole sidewall in Figure 10(c), yielding the shoe sole sidewall glue spraying trajectory points is shown in Figure 10(f). In Figure 10(f), the cutting in the middle of the shoe sole is relatively uniform, while the cutting spacing at the heel and toe is smaller than in the middle of the shoe sole, resulting in a denser distribution of trajectory points at the heel and toe. Due to the larger curvature variations in the heel and toe regions, the spacing between the glue spraying trajectory points slightly increases, but it still meets the application requirements. Extraction of glue spraying trajectory. (a) Target plane cutting (b) angle threshold extraction (c) the highest point of the shoe sole sidewall (d) heel area (e) toe area (f) glue spraying trajectory.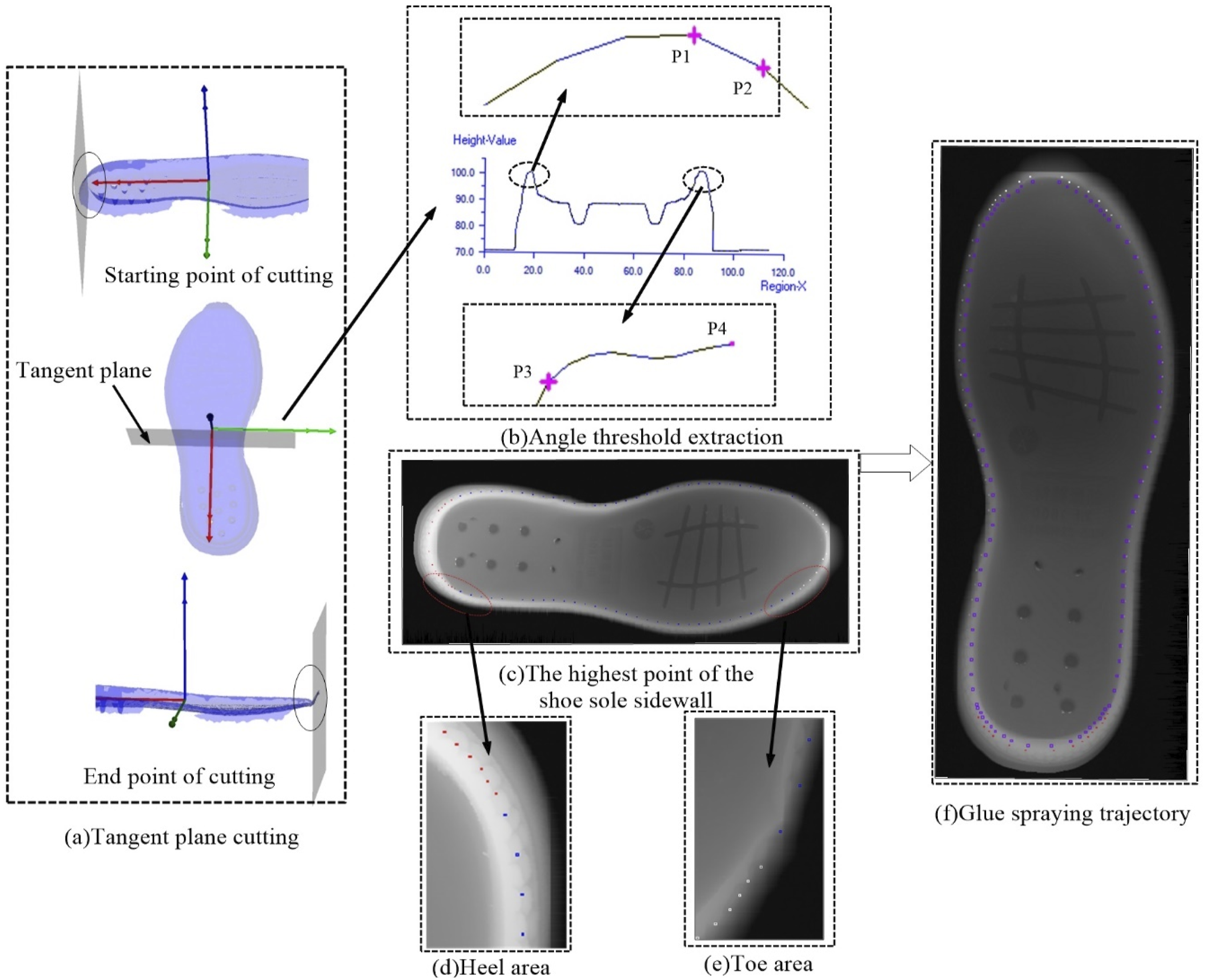
Based on the method of extracting glue spraying trajectory from Figure 10. Since the average projection width of the shoe sole sidewall on the sole plane is 10 mm, to ensure that the normal vector of the glue spraying points lies at the center of the spraying surface, the glue spraying trajectory points are offset inward by 5 mm to obtain the projection points of the shoe sole sidewall. Considering the curvature of the shoe sole sidewall and the density of the captured point cloud, multi-scale search regions with radii of 0.5 mm, 1.0 mm, and 1.25 mm are established centered on the projection points, as shown in Figure 11. PCA is used to solve for the normal vectors in different scale regions, and the normal vector of the glue spraying trajectory point is calculated using formula (10). To verify the stability under multi-scale neighborhood weighted normal vector estimation, uniform sampling, gradient sampling, and fringe density sampling are used in the regional density of the spraying trajectory points on the shoe- sole sidewall, and Gaussian noise with standard deviations of Establishing multi-scale search area. RMS of normal vector deviation angle.

From Table 4, under different sampling methods and noise levels, the RMS of the multi-scale domain weighted normal vector deviation angle is the smallest, which is better than the fixed neighborhood and adaptive neighborhood, outperforming both fixed neighborhood and adaptive neighborhood methods. The RMS of the normal vector deviation angle for multi-scale neighborhood weighting, adaptive neighborhood, and fixed neighborhood increases with the increase in noise standard deviation. Under the noise condition of
Experiment and analysis of glue spraying trajectory for different shoe sole styles
Trajectory planning is conducted for different styles of shoe soles, and experiments are performed on 273 soles of various styles to verify the robustness of the proposed method. The experimental results demonstrated that 273 shoe soles were correctly identified in terms of their adhesive spraying trajectories. Both the accuracy and efficiency of the trajectory planning met the application requirements of the production line. The glue spraying trajectory recognition results for different shoe sole styles shown in Figure 12, the color codes in Figure 12 are consistent with those in Figure 5. Figure 12(a) and (b) show different shoe sole styles, while Figure 12(c) and (d) display the left and right shoe soles of the same pair of shoes, Figure 12(e) and (f) show shoe soles with special shapes featuring curved glue spraying areas. The glue spraying trajectory points and normal vectors of the shoe soles can be identified. The cutting planes move with equal intervals in the direction, due to the curvature changes of the shoe sole sidewall, the spacing between the trajectory points is inconsistent. The curvature is larger at the heel and toe, so if the same cutting interval as the middle part of the sole is used, the trajectory point spacing at the heel and toe becomes larger, which affects the interpolation accuracy of the trajectory. For the heel and toe regions, the cutting area is divided by the heel and toe boundaries with a 30 mm width and a cutting plane spacing of 3 mm. The cutting plane spacing for the middle part of the sole is set to 5 mm. In Figure 12, the cutting density at the heel and toe is greater than at the middle of the sole. However, the significant curvature changes in the heel and toe regions cause the spacing between the glue spraying trajectory points to slightly increase, but this does not affect the interpolation accuracy of the robotic arm for the glue spraying trajectory points. Glue spraying trajectory recognition results for different shoe sole styles. (a) Style one (b) style two (c) style three (d) style four (e) style five (f) style six.
Accuracy and efficiency of the algorithm.

Glue spraying simulation and experiment
Glue spraying simulation
According to the spraying trajectory, the simulation experiment of shoe sole glue spraying is shown in Figure 13. The left and right views confirm full coverage of the glue film in the spraying area without overflow on the outer side of the sidewall. The top-down views of shoe sole A and shoe sole B reveal neat outer boundaries with no overflow, though minor irregularities appear on the inner side in areas with larger curvature. For shoe sole B, the glue film is slightly thicker in the middle and thinner at the edges, but the simulation results still comply with the production process requirements. Simulation experiment of shoe sole glue spraying.
Glue spraying experiment
By calibrating the robotic arm and camera, the glue spraying trajectory in the visual coordinate system is converted to the robotic arm coordinate system, and the spraying experiment is conducted on the experimental platform is shown in Figure 6. A fluorescent agent is added to the glue to highlight the spraying effect, the glue spraying effect of difference shoe sole styles is shown in Figure 14. There is no glue overflow at the edge of the sidewall, and the glue coverage in the spraying area of the sidewall is uniform. The curvature of the glue spraying areas at the toe and heel shows significant fluctuations, but there is no overflow beyond the boundaries or areas that were missed. The spraying experiment demonstrates that the glue spraying trajectory extracted using the cutting plane and multi-scale neighborhood point cloud normal vector estimation method is stable, and the spraying effect meets the requirements of the footwear production process. Glue spraying effect of difference shoe sole styles.
Conclusion
The cutting plane and multi-scale normal vector estimation method effectively identifies the glue spraying trajectory on the sidewalls of shoe sole. The feasibility of TP-MNVE method has been verified through simulation and experiments, solving the bottleneck of multi-style shoe sole glue spraying, realize automation of glue spraying for shoe soles significantly mitigates the labor-intensive challenges prevalent in the footwear industry and promoting the automation transformation of textile industry. At the same time, it provides theoretical support for the future adhesive spraying of shoe soles. The main research conclusions are as follows: (1) The tensor voting and curvature feature denoising method was employed to remove both large-scale and small-scale noise from the sole point cloud, resulting in a reduction of 16,990 points, slightly fewer than the reductions achieved by Laplacian filtering, bilateral filtering, and median filtering. The proposed method demonstrated superior performance, the SNR is 42.156, the entropy is 3.19 × 105, and processing time is 896 ms, outperforming Laplacian filtering, bilateral filtering, and median filtering. These results indicate that the tensor voting and curvature feature method effectively eliminates noise while maximizing the preservation of local details in shoe sole point cloud. (2) To address the diversity of shoe styles, boundary search calipers for the heel and toe are established, cutting regions are created based on these boundary search calipers. Cutting planes are used to obtain XLD contour curves, glue spraying trajectory points are obtained using angle thresholding. The simulation of the shoe sole glue spraying trajectory shows that the method identifies the spraying trajectory stably, with no missed or misjudged trajectory points. (3) Biasing the glue spraying trajectory point as the reference, establishing the multi-scale normal vector estimation region. Under the conditions of uniform sampling, gradient sampling and fringe sampling, the normal vector estimation is carried out by using fixed neighborhood, adaptive domain and multi-scale neighborhood. The simulation of normal vector estimation shows that under different sampling conditions, the RMS of the normal vector deviation angles using multi-scale neighborhood weighting are 0.81°, 0.76°, and 0.66°, which are better than fixed and adaptive neighborhoods. Glue spraying simulation and experiments on different shoe styles show that the trajectory accuracy is 0.931 mm, processing time is less than 1.6 s, and the glue spraying effect meets the required standards.
Future work
(1) Further improvements are needed to enhance the accuracy and efficiency of glue spraying trajectory planning. (2) The glue gun significantly influences the spraying effect. Therefore, introducing a glue gun model is essential to optimize the glue spraying trajectory.
ORCID iD
Hao Zhang https://orcid.org/0000-0001-9210-6811