
Abstract
Introduction
Smart wearable technology has dramatically advanced the interaction between reality and the virtual world through extended reality (XR) systems, 1 among which controller-type smart devices operated by hand contribute greatly to increased immersion in the virtual world by providing haptic feedback to users. However, hand-held smart devices have limited naturalness because users cannot grasp or touch objects in a virtual environment while holding the controller. 2 Thus, the development of real-world immersive XRs requires different kinds of devices that facilitate relatively more natural human interactions, particularly by freeing users’ hands, recognizing gestures, and providing tactile feedback to help users feel virtual experiences as real ones. 3 For this reason, various types of smart hand wearables in the form of gloves are being developed, allowing users to touch and manipulate virtual objects in a more intuitive and direct way.
Given the intricate structure of the hand, attaining an optimal fit for gloves presents a considerable challenge. Notwithstanding these difficulties, it is crucial to achieve a precise fit by conducting a thorough analysis of hand ergonomics and anthropometrics because glove fit significantly impacts hand safety, functionality, and comfort, all of which influences the decision to wear gloves. 4 A tight-fitting glove can restrict the wearer’s hand movement, impede circulation in the fingers, and increase the risk of work-related injuries.5,6 Conversely, if the glove is too large or loose-fitting, the wearer may experience reduced dexterity and grip capability.5,6
While the use of elastic materials is one of the most effective ways to address fitting issues in gloves, the same approach does not apply to smart hand wearables. Smart hand wearables often feature a structure involving strings or rigid links attached to the fingers, known as exoskeleton types, 7 that lack flexibility. Even with the utilization of elastic fabrics, the inclusion of sensors, actuators, wires, and other components8,9 can significantly reduce flexibility. Therefore, the fit of smart hand wearables cannot heavily rely on material elasticity, and fit degradation issues cannot be completely eliminated regardless of the materials used. Consequently, enhancing the fit of smart hand wearables should be based on a thorough examination of the wearer’s hand morphology.
Smart hand wearables are worn primarily for hand motion tracking and haptic feedback.10–12 These functions can be implemented accurately when the fit in the fingertip is excellent. For example, smart hand wearables that track finger motions detect movement through sensors at the fingertips, and those that provide haptic feedback provide tactile stimulation by attaching vibration motors such as linear reactive actuators (LRAs) to the fingertips. 13 Thus, to provide accurate tracking of hand movements and realistic tactile feedback, the hand wearable’s fit of all five fingertips must be precise.
Studies measuring and analyzing hand dimensions have been conducted among people in several countries, including Bangladesh,14,15 Czech Republic, 16 Filipin, 17 India,18–21 Jordan,22,23 Nigeria,24,25 the USA, the Netherlands, and Italy. 26 In Korea, several studies27–30 classified hand shapes based upon statistical analyses of hand dimension data retrieved from Size Korea, the National Standard Anthropometric Surveys led by the Korean Agency for Technology and Standards, Government of Korea, or hand data collected by researchers themselves, discussed below. 31
Choi and Kim 30 classified the hands of 824 adults aged 18 to 64 into two types: short and chubby and long and slender. Kwon and Choi 29 classified the hands of 134 men and 131 women aged 18 to 30 into two male types—small, short-fingered and large, and long-fingered, and three female types—medium-sized, thick-fingered, and thin-fingered. Kim and Kee 28 classified the hands of 325 men aged 20 and above into two types: thin and long and thick and blunt. Choi and Do 31 measured the right hands of 353 older women aged 60 and above and classified them into three types: average, long and wide, and short and narrow. These four studies successfully classified the overall characteristics of hands by applying factor analysis to statistically determine the criteria items for hand classification. However, solely focusing on overall characteristics may overlook the intricate details of the fingers. Jee and Yun 27 classified the hands of 321 adults into four types: spacious hand and short fingers, short palm but above-average fingers, long palm and fingers, and narrow hand and short fingers, and emphasized that, in addition to breadth and length of hands, other dimensions such as finger length should be considered for improved glove fitting.
Moreover, relative to these studies, Vergara et al. 32 developed a classification system more closely related to the characteristics of smart hand wearables. They analyzed the metacarpal lengths and the length from the wrist point to the fingertips of 139 Spanish adults. This analysis was significant as it considered the variance in hand shape that occurs due to each of the five fingers. However, achieving an accurate fit for the smart hand wearables' finger region relies more on the individual lengths of each finger rather than the overall length from the wrist to the fingertips. Therefore, to develop a classification system that better suits smart hand wearables, it is crucial to directly estimate the lengths of individual fingers. Additionally, shape classification based on the circumference of the fingers, not addressed in these studies, should also be considered.
Therefore, to address this gap, this study develops, for the first time, a classification system for a smart-hand wearable design that incorporates information on individual finger length and circumference by extracting hand measurements that elucidate finger characteristics. Another novelty of the study is that to enhance the practical applicability of the hand classification system, it proposes guidelines for its convenient implementation, including hand-type diagnosis and pattern making.
Materials and methods
Participants
Distribution of participants by age group.

Data collection
In eighth Size Korea, nine hand items were measured through direct measurement and 39 hand items through three-dimensional scan measurement. The length, first joint circumference, and end joint circumference of the five fingers used in this study were collected through three-dimensional scanning (Figure 1). Hand dimensions and symbols.
Data analysis
Classification of finger length and circumference types
Analysis of the hand length type was performed for all items, using an index value based on the middle finger length to compare the differences between finger lengths. To this end, hierarchical cluster analysis was conducted by setting the values of thumb length (
In the analysis of the hand circumference type, the index value of the end joint circumference (
Discrimination analysis for finger type diagnosis
Discriminant analysis was applied to determine the finger length and circumference types. First, stepwise discriminant analysis was conducted to identify the independent variables important in determining finger length and circumference types, and three or four items were selected according to importance level to derive the discriminant function and accuracy rate. The discriminant function was calculated in the form of Fisher’s linear discriminant.
Regression analysis for pattern making
Linear regression analysis was conducted to provide regression equations of detailed finger dimensions. Considering practical applications, the independent variables input into the regression equation were limited to one for the length type and two for the circumference type, and the explanatory power and validity of the derived regression equation were analyzed.
All statistical analyses were performed using IBM SPSS Ver. 26.0.
Results and discussion
Classification by finger length type
Finger length-type classification of men’s and women’s hands.

***p < .001, Duncan test, A > B.
In the Mountain type, as the middle finger is generally longer than all other fingers, the difference between the five fingers is remarkable, while in the Horizon type, all other fingers are proportionately longer than the middle finger, reflecting a very small difference in length between all five fingers. Conversely, in the Uphill type, the thumb and the index finger are proportionately shorter than the middle finger, while the ring and little fingers are proportionately longer. Finally, the Downhill type has a proportionately longer thumb and an index finger than the middle, while the ring and little fingers are shorter. The post-test for the cluster analysis found that all four independent variables showed a significant difference between types at the 0.001 level.
The classification results highlight that human hands not only exhibit size variations resulting from size reduction and enlargement while maintaining the same shape and proportion but also vary significantly based on the lengths of the five fingers. This observation has been supported by previous studies. For instance, Vergara et al. 32 conducted an analysis of the variability in the lengths of metacarpals and fingers, proposing nine combinations of three palm shapes (PS) and three hand shapes (HS). Among these combinations, the PS1-HS1 type, characterized by a thumb-index predominant pattern, shows similarities to the Downhill type in our study. Conversely, the PS3-HS3 type, characterized by the ring-little predominant pattern, shows similarities to the Uphill type in our study. Furthermore, the overall average PS2-HS2 type encompasses both the Mountain and Horizon types observed in our study.
The findings show the similarities between the hand types identified by Vergara et al. (2019) 32 and the finger length types in our study, although there are noticeable differences in the frequencies of each type. PS1-HS1, PS2-HS2, and PS3-HS3 types account for 19.4%, 22.3%, and 11.5% of the total participants, respectively. Notably, the least common is the PS3-HS3 type, which is similar to the Uphill type, but the latter exhibits the highest proportion among all types in our study, with 33.1% for men and 31.1% for women. These differences in frequencies could be attributed to variations in classification criteria between Vergara et al. 32 and our study, as well as potential distinctions between the Spanish and Korean people.
Classification by finger circumference type
Finger circumference type classification of men’s and women’s hands.

***p < .001.
In the Cone type, the circumference difference between the first and end joints of each finger is large, reflecting that the shape of the finger narrows steeply toward the end. Conversely, the Cylinder type shows a relatively small circumferential difference between the first and end joints of each finger, such that the shape of the finger is fairly cylindrical. In addition, the independent samples’ t-test of the cluster analysis found that five independent variables showed a significant difference between types at the 0.001 level.
As evident from the second classification results, the diversity of finger lengths in human hands is not the only distinguishing factor; a clear distinction can be made based on the circumference of the fingers. However, no study has discussed the detailed morphological diversity based on the specific circumference of the fingers. Kwon and Choi 29 divided women’s hands divided into three types: medium-sized, thick-fingered, and thin-fingered and focused the discussion on the circumference of the fingers. Unfortunately, they categorized fingers as thick or thin based on overall finger thickness without distinguishing between the root and the tip of the fingers.
This study argues that taking into account the difference in circumference between the root and the tip of the fingers is crucial for the accurate functioning of smart hand wearables. For example, a wearer with noticeable differences in circumference between the finger root and fingertip, such as a cone type, would wear gloves that fit the finger root. However, this can result in excess material at the fingertip area of the gloves, potentially causing poor adherence to attached motion sensors or tactile actuators and leading to malfunctions. By contrast, a wearer with similar circumferences between the finger root and the fingertip, such as a cylinder type, may feel that the gloves are tight around the blunt fingertips when wearing gloves according to the overall hand size. This is especially important for smart hand wearables as they often position sensors or actuators at the fingertips, 13 resulting in a loss of material flexibility. In the worst-case scenario, the fingertips may not fit into the wearable device at all. Therefore, to avoid fitting issues faced by wearers of each type, it is necessary to design glove patterns for each of the hand classification types proposed in this study and manufacture smart hand wearables accordingly.
Cross-analysis of finger length and circumference types
Cross-analysis of the finger length and circumference types (Men).

The combination with the highest frequency and the combination with the lowest frequency among all finger type combinations are highlighted in bold.
Cross-analysis of the finger length and circumference types (Women).
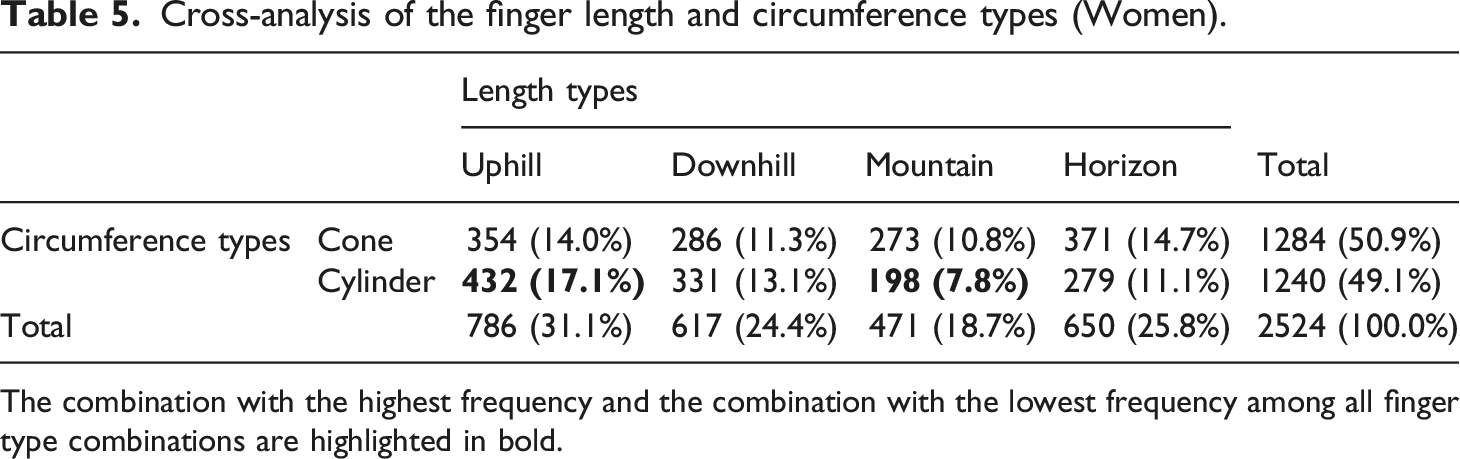
The combination with the highest frequency and the combination with the lowest frequency among all finger type combinations are highlighted in bold.
Discrimination analysis for finger type diagnosis
While the successful classification of the existing hand data is important, the practical application of the proposed classification system in this study relies on the availability of a discriminant method for new data. Therefore, we introduced a discriminant function that enables the diagnosis of hand types, ensuring its practical applicability.
Accuracy rate of the finger length type discriminant function according to the number of items.

The ultimately selected number of items is highlighted in bold.
The accuracy rate of the finger circumference type discriminant function according to the number of items.

The ultimately selected number of items is highlighted in bold.
We found that the more measurement items included in the classification function, the higher the accuracy of type determination. However, measurement items cannot be added endlessly, given the time and effort required to measure them. By comparing the accuracy rate of the finger length type discriminant function by the number of items, a severe loss of accuracy (approximately 25%) was found between three items and two items for both men’s and women’s hands (Table 6). Moreover, the accuracy rate dropped considerably for four versus fewer items in the finger circumference type discriminant function (Table 7). Thus, the measurement items were limited to three for length type discrimination and four for circumference type discrimination in the interest of accuracy rate and practical ease of use.
As a result, it was deemed appropriate to use the three items of the length of the thumb, middle finger, and little finger for both men and women for finger length type discrimination. For finger circumference type discrimination, it was deemed appropriate to use the first and end joint circumference of the thumb and index fingers for men but the first and end joint circumference of the thumb and middle fingers for women.
Discriminant function of finger length type.

Discriminant function of finger circumference type.


Group scatterplot of finger length types by canonical discriminant functions one and two (Left: Men, Right: Women).
Regression analysis for pattern making
When designing a smart hand wearable pattern, it would be ideal to have all the dimensions of the wearer’s hands. However, since such customization is practically impossible for off-the-shelf products, this study attempted to develop a regression equation based on a limited set of hand dimensions so that patterns can be designed with only a few given dimensions. Regression analysis was performed by assuming that the dimensions of only one finger were given in turn, and the final independent variable was determined by comparing the explanatory power of all regression equations. Accordingly, the independent variable selected is the middle finger length for the length type regression equation and the first and end joint circumference of the middle finger for the circumference type regression equation.
Regression equation by finger length type.

***p < .001.
Regression equation by finger circumference type.

***p < .001.
The hand classification system proposed in this study has enhanced the generality of finger length-based classification by yielding similar results that reinforce previous research in this area. Furthermore, it has revealed variations in proportion distribution based on race or nationality, even among similar types. Moreover, we have expanded the analysis of detailed finger morphology by introducing finger circumference types, which have not been explored in extant research. The cross-analysis of finger length and circumference types has consistently demonstrated a balanced frequency distribution across all combinations, highlighting the meaningfulness of all proposed types in this study. Additionally, by deriving and providing discriminant functions and regression equations based on our classification system, we anticipate an increased practical utility.
Conclusion
With recent advances in smart hand wearables, such as motion-tracking gloves and haptic gloves for XR, there is a growing demand for detailed finger shape analysis by incorporating various sensors or motors at the fingertips. The categorization of fingers is necessary because human hands do not simply scale up or down in size while maintaining the same proportions of finger length and circumference. Our hands exhibit variations not only in overall size but also in the individual ratios of finger lengths and circumferences. Unfortunately, this crucial aspect has been consistently overlooked, both in research and in the actual production of gloves, resulting in poor fit and inadequate performance. To innovatively address this issue, this study proposes a new hand classification system focusing on the length and circumference characteristics of the fingers for designing smart hand wearable devices.
The academic significance of this study lies in the classification of hand types based on the detailed characteristics of the finger area rather than general aspects of the entire hand. The cross-analysis results indicated an even distribution of frequency among all length and circumference type combinations without excessive bias. Therefore, the hand classification system proposed in this study successfully categorizes the Korean hand into eight distinctive types and would be very useful if applied to pattern-making or sizing systems of smart hand wearables in the future.
The practical implication of the proposed finger classification system is its potential to improve fingertip fit, thereby enhancing the effectiveness of smart hand wearable products such as motion-tracking gloves or haptic gloves. Additionally, considering the practical applicability for both wearers and designers of smart hand wearables, this study provides a discrimination method for finger types to enable hand type diagnosis and regression equations for finger dimensions to assist pattern-making.
The study has a significant limitation in that the data only comprise Korean samples. Future research could extend this to other nationalities. Moreover, future research could build on the proposed classification method and validate its effectiveness through real-life assessments of wearability to enhance the robustness and practical relevance of this study’s findings.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the New Faculty Startup Fund grant funded by the Seoul National University (No. 350-20220075) and the National Research Foundation of Korea (NRF) grant funded by the Korean Government (MSIT) (No. 2022R1A4A5034046).
Ethical approval
This study was approved by Seoul National University Institutional Review Board (Ethics Code: E2211/002–006) on 14 November 2022.