
Abstract
Posture monitoring and investigation in wearable technology play a significant role in the analysis of body postures. This study aims to develop a new flexible smart garment realized by stitching flex sensors at different joint positions for sensing flexion angles in static and kinematic motions. Calibration tests were conducted by systematically flexing wrist, elbow, and knee joints, respectively. A male subject then wore the developed flexible smart garment to sense different body postures. The measured data from flex sensors inside the smart garment exhibited immediate response after each joint movement of the male subject. The minimum measurement sensitivities of flex sensors mounted at the knee, elbow, and wrist was 0.94°, 0.8°, and 0.56°, respectively. Measured flexion angle changes were within 80°, 95°, and 140° ranges from knee, elbow, and wrist. Both stand and walk tests at a velocity of 4 km/h indicate that the flexion angles of three joint positions include wrist, elbow, and knee joints can be effectively monitored using the flex sensor–based smart garment. Flex sensor can be employed to monitor body joint movement and future to identify different postures of body joints in practice. The flexible smart garments cannot be washed.
Introduction
The latest growth of wearable sensing technologies has created interest in monitoring the body statics through wearable technology. This study was typically implemented in the Research laboratory in a real-life environment allowing long-term observing [1,2]. The body postures are generally described as an output measure of biomechanical or biomedical tasks of our population, especially for clinical and research objects [3–5]. Flexible sensors that can be fabricated into clothing to measure daily practical activities are an emerging concept. It proposes to enhance the patient's quality of life by efficiently providing real-life data collections [6–9].
In earlier studies, there are various categories of sensors acclaimed as sensing methods in wearable textile-containing magnetic sensors, resistance sensors, and optical fiber sensors. Resistance sensors comprise bendable wires [10,11]; conductive polymer [12]; graphene woven fabrics [13,14]; silver nanomaterials, melted implant elastomer, and microchip technology [15]; and stretchable carbon nanotubes [16,17]. However, these resistance sensors and bend or flex sensors have benefits of low weight, bendable, low cost, and appropriate devices for wearable textiles [18], the performance of such devices is affected by signal sense and flux. In the combined techniques, this problem is controlled by applying a time-saving calibration procedure [19]. Technologies stated above have substantial influences on the sensing of wearable technologies. For more comprehensive and added usages, flex sensors are characterized by high elasticity, good accuracy, low cost, and non-toxicity [20]. Sensors fabricated with knitted textile for body monitoring is the relatively low cost can track body movements in specific positions. Many research teams are striving hard in this area using flex sensors and fiber optics sensors [21–24], smart belts mainly fabricated with a flex sensor and continually measure deformation angles. The stitched method is mostly suitable without clothing discomfort and aesthetics, these parameters are essential for lengthy period monitoring and very useful for integrated garment stretch and bend for sensing techniques, activity recognition, and body monitoring purposes [25]. However; there is a minimal level of studies has been carried out in fabricating flex sensor into knitted textile to measure the body motions during statics and kinematics positions especially at substantial angle change of body joint positions [26–32].
This study is proposed to develop a new flexible smart garment (FSG) based on flex sensing technology for monitoring deformation of different body joint postures. This new FSG is feasible, flexible, and ideal to contact wearer's skin. This FSG manually calibrated by placing flex sensor over different diameter 3D printed tubes and also calibrated by varying flexion angles of wrist, elbow, and knee joints. This knitted fabric-based FSG continually measure body joints deformation in physical time without discomfort to the wearer which creates it wearable and portable in sports and bones injuries monitoring system. This research papers mainly focus on sensing mechanism and elementary sensing performance of different static and kinematic postures by wearing FSG to one male subject.
Fabrication method of FSG and calibration
Flex sensor structure
Flex sensor is a typical sensor which can be used to measure different bend status concerning resistance change. Flex sensors can continuously measure the deformation occurred by perimeters of body postures in motion and send data signals wirelessly to PCs or smartphones through a low power Bluetooth device.
Figure 1 depicts typical structure of a flex sensor–based sensing system, which includes a flex-sensing unit with dimensions of 110 mm × 40 mm × 0.18 mm (height × width × thickness), a circuit board for data collection, and a Bluetooth system for data transmission. Flex sensor is characterized by a resistor which changes its resistance arise from various bend status when mounted at different joint positions of the human body. Measurement frequency of flex sensor is 30 Hz.
A schematic diagram of the connection of flex sensors.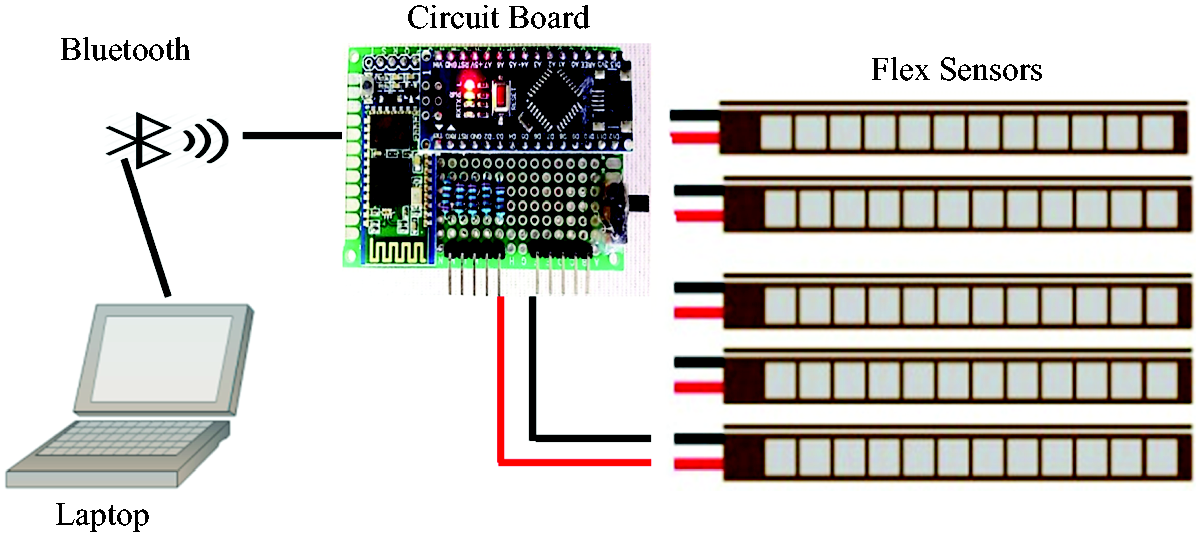
Figure 2 presents a basic circuit diagram of a flex sensor, the voltage output of the flex sensor that can be determined as
Basic circuit of flex sensor. Key properties of material.


Flex sensor encapsulation
In this study, three sensors were mounted on right wrist, elbow, and knee joints by stitching the two ends using a super layer of knitted fabrics which is fully applicable in the field of smart textile such as pressure sensor, intelligent shoes, and heart rate monitor [33,34].
Considering the length and width of flex sensor, three sensors are placed in three positions of joints such as wrist, elbow, and knee. Figure 3(a), (b), and (c) depict sensor encapsulation and sensors fixation on the body of a male subject. Sensor positions were first marked on the knitted garment and flex sensors were then mounted at the joint position as shown in Figure 3(b). The knitted garments can tightly compress flex sensor to contact with skin without sacrificing sensing performance and measurement accuracy. Grooves were sewed over the wrist, elbow, and knee joints for the placement of flex sensors to ensure that the flex sensors can follow the related joint movement. Total three flex sensors were placed, two flex sensors were placed on back side of wrist and elbow, and one flex sensor was placed on the front side of knee positions. Three flex sensors were finally mounted inside the three grooves and three electrical cables were connected to the circuit board placed in a pocket at the right shoulder of the male subject for data collection as shown in Figure 3(c) and the circuit board is protected with the plastic coating before placement into the pocket to protect from electric shocks.
Symbol and cluster locating over the smart sensing garments, (a) details of the flex sensor placed on the body of the subject, (b) marked various position of flex sensor on the body, (c) Pocket box: contains all parts of flex sensor placed on the shoulder of the subject.
Calibration
Before starting the experimental analysis, the manual calibration test was conducted to verify the performance of flex sensor by placing a flex sensor over different diameter tubes. The objective of this calibration test is to examine the sensor performance at different bending status since the different diameter tubes are used to simulate the human body joints with different dimensions.
Figure 4 presents manual calibration of flex sensor over different diameter tubes. The test was performed in an insulated research laboratory at a stable room temperature 25 ± 2℃. One-fourth part of the tubes was marked with a marker. After that, the flex sensor was placed on the smooth surface of ten tubes having different diameter step by step. The 3D printed tubes were produced on finder printer which works on fused deposition modeling (FDM). Flex sensors were easily mounted over tubes because of its smooth surface and lightweight properties. Flex sensor was tightly mounted on the tube surface and then flex sensor data were recorded against the diameter value of all tubes. Diameter values of all tubes include 10, 20, 30, 40, 50, 60, 70, 80, 90, 100 mm. This process was carried on to the 10th step when the sensor was bent over the 100 mm tube. This manual calibration test was used to understand the signal change of the flex sensor and bent status as flex sensors can record deformation when it is embedded into a garment for static and dynamic measurement.
Calibration procedure of flex sensor embedded over 3D printed tubes.
Figure 5 describes the relationship between flex sensor output and tube diameter during calibration. It is clear that the flex sensor has a nonlinear relationship between measured flex sensor output and bent diameters. A second-order polynomial can well fit this nonlinear relationship. The flex sensor output data increase continuously as much as tubes diameter decrease. The sensor output in this relationship reaches around 270 Vout at 10 mm diameter value, indicating that the resistance of flex sensor increases as the rise of flexion angle. A minimum of 10 Vout was finally obtained at 100 mm diameter tube since the bent status of flex sensor was minimal among all tubes. This phenomenon of flex sensor relaxation and flexion showed that flex sensor could be used for flexion angle measurement of joints with different diameters. By mounting flex sensors over the surface of joint positions, the flexion status can be successfully monitored for different postures.
Calibration relationship of flex sensor output against tube diameter.
Calibration test of flex sensors for monitoring body postures
Calibration test was conducted to verify the measurement performance of flex sensors by holding different static postures. This test was performed in a laboratory where room temperature was stable at 25 ± 2℃. Three flex sensors were selected and stitched over the positions of wrist, elbow, and knee. Flexion angles of three joints include wrist, elbow, and knee were controlled to increase step by step with an angle increment of around 10° approaching the maximum flexion angle. Each angle increment was maintained for 10 s. Then the output data of signal change was collected against both sensor output and time; this data were further related with flex sensor Vout into flexion angle by quadratic education to examine the measurement performance.
Figure 6 describes relationships between flexion angles against output data of a flex sensor during the calibration test. It is clear that flex sensor data have nonlinear relationships against output data of flex sensors. Second-order polynomials can well fit these nonlinear relationships.
Calibration relationship of flexion angle against flex sensor output of one male subject in the cyclic test.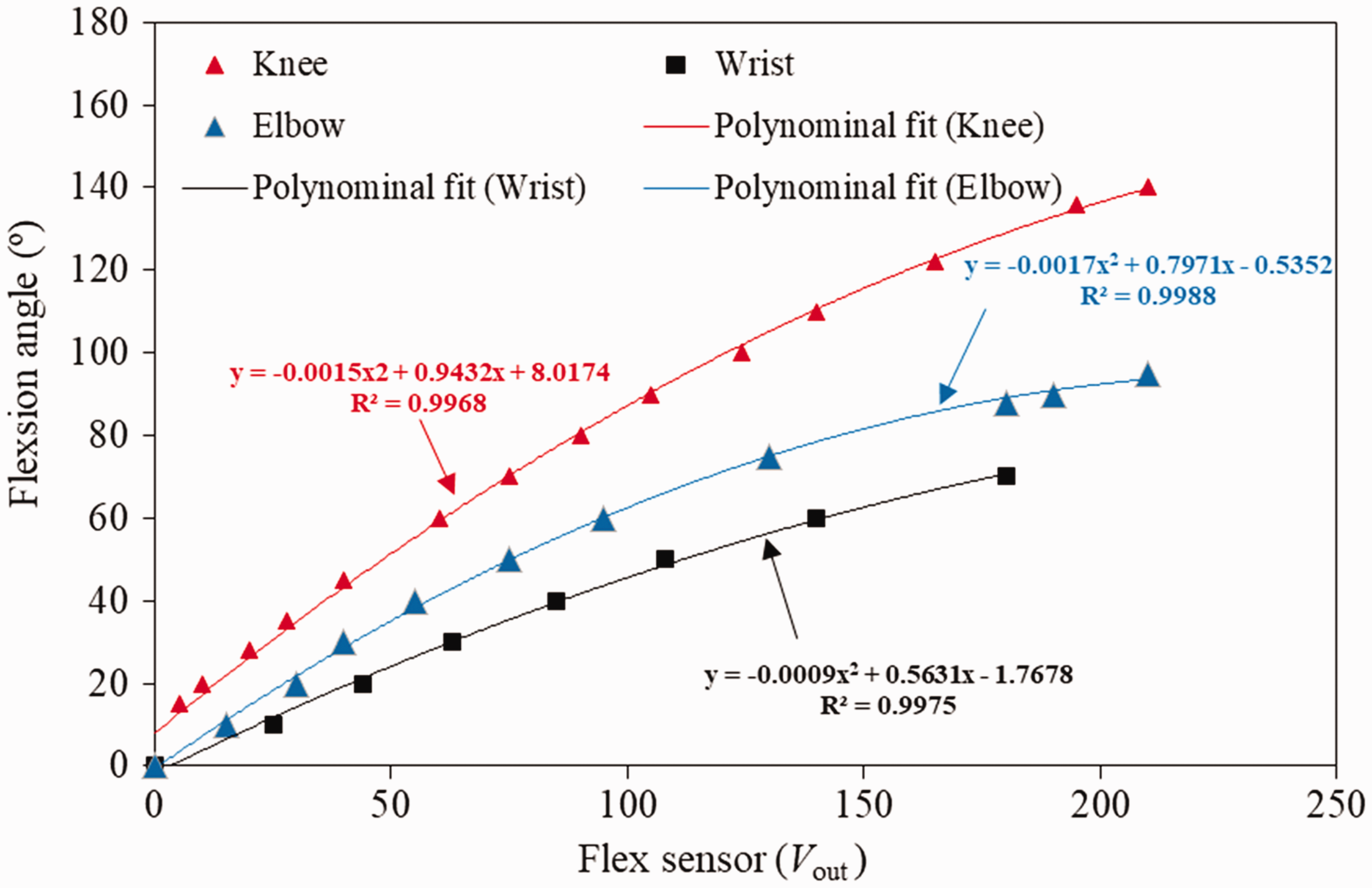
The full flexion angles of wrist, elbow, and knee joints were 80°, 95°, and 140° at the maximum signal output of 180 Vout, 210 Vout and 210 Vout, respectively. The elbow and knee showed same output and resistance due to bent state of flex sensor was higher at elbow position. It was lower at wrist position. According to the fitted relationship between flexion angle and output signal change, each point change of flex data output of wrist, elbow, and knee joints lead to a related shift in flexion angle 0.94°, 0.8°, and 0.56°, respectively. The angle changes were measured by vertical angle scale. It is clear that the flex sensor mounted at knee position is the most sensitive to flexion angle change since the related diameter change of flex sensor is more significant than wrist and elbow. On the contrary, the flex sensor mounted at the wrist angle exhibited the lowest sensitivity due to the smallest bend diameter for each unit flexion angle change.
Experiment of body posture measurement using flex sensors
Experimental procedures
A healthy male subject was selected for the body posture measurement using the flex based sensing system. The subject was 34 years old and 164 cm tall with a weight of 54 kg, and the body mass index (BMI) was 21.5. One static and one kinematic test were conducted on the male subject by changing different postures and test procedures are introduced as follows:
Stand tests: a static test of the male subject was conducted by wearing the smart garment performing different postures. Figure 7(a) shows the different posture states of the male subject in static tests. It is seen the subject initially retained the two arms at the straight state and then bent the arms to the final state. Finally, the subject forced his legs to sit down. The whole static tests were divided into five different postures as shown in the figure and each posture state was maintained for 20 s. A total of 100 s were required to complete five postures.
(a) Standing test postures and (b) walk test postures.
Walk tests: Typical photo of walk test is shown in Figure 7(b). To examine cyclic changes of flex sensors, the subject moved forward and backward by moving arms and legs for 22 cycles, and the complete monitoring test was finished within 140 s. The velocity of the subject was 4 km/h during walk test as shown in Figure 7(b). The frequency of data collection of flex sensors was 30 Hz.
Data analysis and discussions
All static and walk test data were summarized in the same figure for comparative study. Figure 8 presents relationships of monitored flexion angle change against time occurred at wrist, elbow, and knee in the stand test as shown in Figure 7(a).
Measured flexion angle of flex sensor in degree against elapsed time during stand test.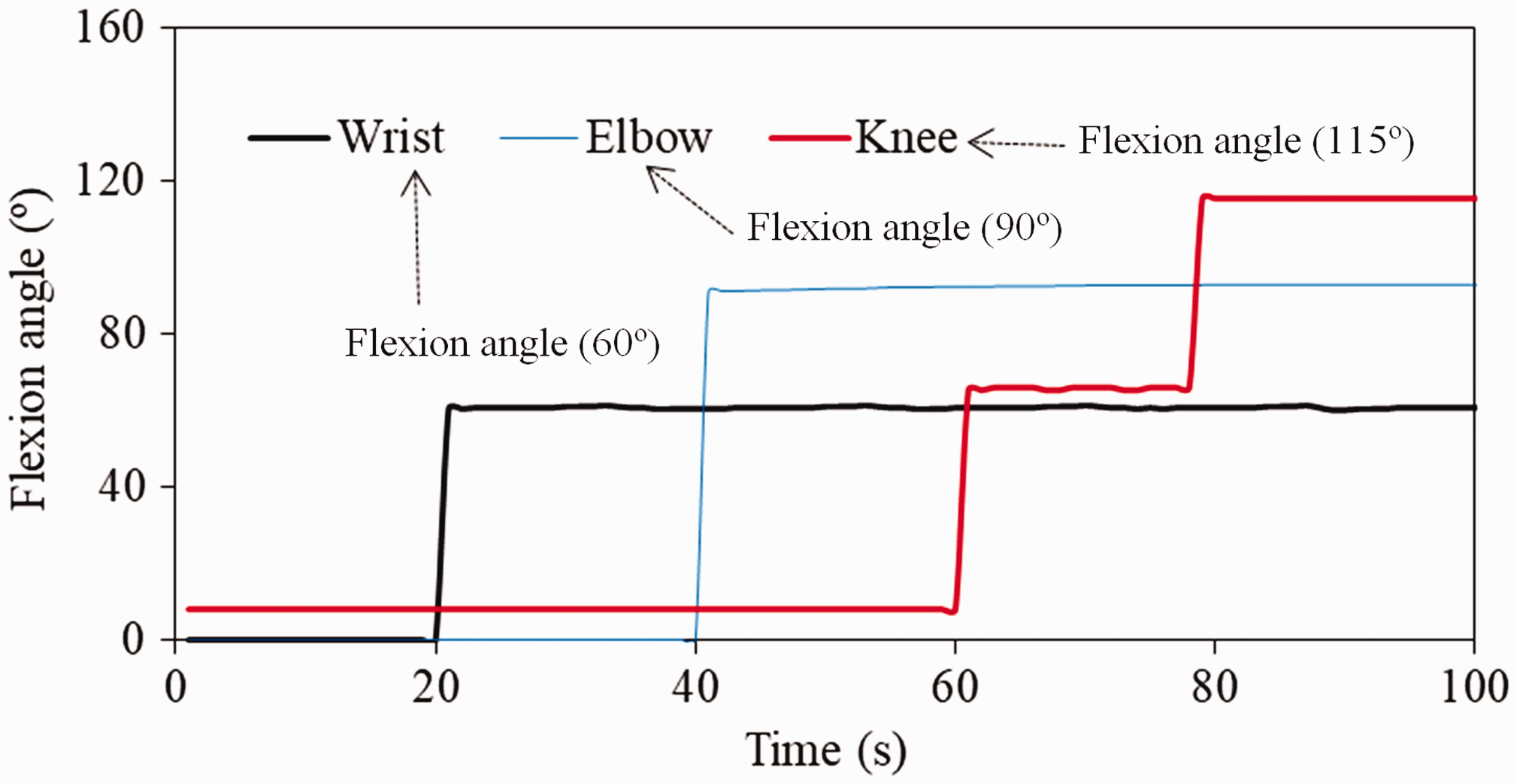
Body postures of the male subject exactly follow the procedures introduced in Experimental procedures section. It is seen there was no noticeable signal change recorded during the first 20 s as the subject was in a static state. Then the flex sensor mounted at the wrist joint exhibited a rise of around 60°, which remain constant up to the end of the posture testing. This recorded data change also reveals that the wrist posture remains in static state within the whole stand test as shown in Figure 7(a). The measured flexion angle at the elbow and keen joints, however, present a sudden rise at 40 s and 60 s approaching around 90° and 60°, respectively. The measured angle of elbow remains unchanged, but the flexion angle of the knee joint shows another sudden rise at the 80 s achieving 115°. These postures can be observed in the posture photos shown in Figure 7(a).
Figures 9 shows relationships of flexion angle change against time of the male subject when walking at a velocity of 4 km/h. Flex sensors were mounted at three joint positions include wrist, elbow, and knee joints. The Flex sensor output is related with flexion angles by applying quadratic equation from calibration results (seen in Figure 6). It is clear that the obtained flexion angle data present cyclic change against time. Measured flexion angles of wrist, elbow, and knee joints are within the ranges of 40–45°, 70–90°, and 40–75°, respectively. A total of 22 cycles of the same flexion angle variations (from peak to peak value) are obtained. All cyclic flexion angle change clearly shows the body posture change of the three joint positions. Each joint body movement can, therefore, be monitored using the developed smart garment in terms of the data change from flex sensors.
Measured flexion angles of the flex sensor against time in seconds during a walk test at a velocity of 4 km/h.
Fabrication of custom-made or mass production smart garment
The current sensing smart garment and its corresponding monitoring application designated that the flex sensors and sensing components can be fully embedded into specified garments for monitoring application.
Figure 10 shows a typical flowchart custom made or mass production for smart garment and monitoring application and flex sensing technology to create new wearable textile. For custom-made or mass production sensors, the design should fully consider characteristics of flex sensor such as small size, flexible, and ease of embedding into wearable garments. Encapsulation methods of flex sensor sensors include a directly stitching sensor and sensing components without discomfort to subject or wearer. The stitched channel was produced to keep all flex sensor component in a safe place. The former encapsulation method is time wasting and more complicated than the latter [35]. However, this technology is also secure to fabricate wireless flex sensor and very comfortable to the wearer. The flex sensors successful survived the fabrication and monitoring, sensing performance of the encapsulated flex sensors may present better performance than the method adopted by the former. After calibration tests and verification with different body posture, new flex sensors can be successfully used in monitoring applications especially to monitor body rehabilitation and bone disorder–related examinations.
Flowchart customs made or mass productions for smart garment and monitoring application.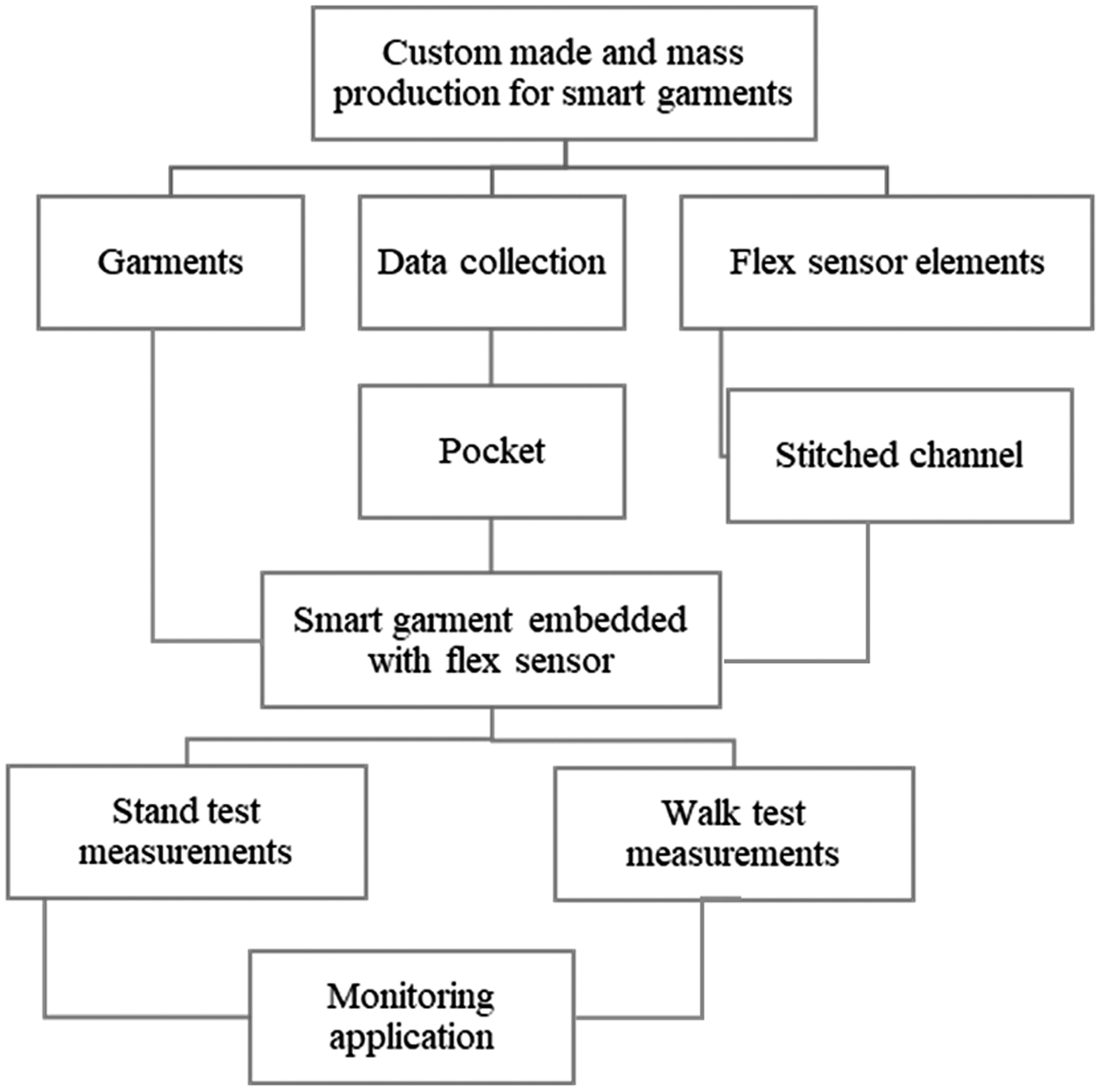
Conclusions
This paper demonstrated the design and implementation of flex sensing technology embedded within knitted garments for monitoring deformation of different angle change of body joints. This FSG sensor is capable of sensing flexion angle change of body joints during circumferences deformation by considering the ratio between angle increase and circumference increase during body movement. Based on the calibration study, measurement study of static postures and kinematic postures, typical findings, and conclusions is drawn as follows:
A FSG was manufactured with wireless flex sensor for monitoring various body postures. Calibration tests indicate that the relationships of measured flexion angles of flex sensors mounted at the above three joint positions against output signal data can be fitted by second-order polynomial equation. The minimum sensitives of flex sensors mounted at knee, elbow, and wrist were 0.94°, 0.8°, and 0.56°, respectively. The maximum flexion angles of wrist, elbow, and knee of the male subject in this study were around 80°, 95°, and 140°, respectively. Different static body postures were effectively identified by the three flex sensors mounted at knee, elbow, and wrist joint positions. The occurred sudden change of flexion angles of the three joints were successfully measured using the smart garment. Kinematic tests were conducted to examine different body postures at a velocity of 4 km/h using this smart garment. Measured flexion angles of wrist, elbow, and knee joints are within the ranges of ranges of 40–45°, 70–90°, and 40–75°, respectively. A total number of 22 motion cycles were successfully monitored within 135 s. The limitation of FSG it cannot be washed.
It is noted the present study only considered one male subject due to a shortage of testing time, limited number of flex sensor, circuit boards, and required garments. More tests accounting for many different groups of people will be conducted in future to evaluate sensing performance of the smart garment and flex sensor established technology and technique can be practically employed to monitor body rehabilitation and bone disorder–related examinations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Financial supports from Fundamental Research Funds for the Central Universities (Project No: 17D110116) is greatly acknowledged. This project is also supported by the Talent Program of Shanghai University of Engineering Science.