
Abstract
The rise of digital nomadism and shifting societal patterns necessitate a re-examination of traditional housing ownership. This study introduces the OTDF Platform, a pioneering homeownership trading platform that views residences as a user-driven distributed system. It establishes a continuous process consisting of tokenization, digitalization, and fluidization of ownership, enabling the free trade and rapid circulation of ownership to dynamically respond to changes in user housing demands and economic status. In methodological development, the platform extensively integrates various technologies and algorithms, including blockchain and space planning, to create a nested functional relationship among parameters, including requirements and expenditures, residential space conditions, and ownership values, thereby elucidating a transparent ownership calculation method. The OTDF Platform demonstrates a comprehensive and adaptable ownership model, reinstating the value of housing as a home within its liquidity, offering innovative insights for addressing housing challenges in the post-digital era.
Keywords
Introduction: Living in a post-digital age with accidents, turbulence, and liberation
We are situated in the post-digital era of magical realism, where the turbulent environment and intricate demands compel a critical reshaping of traditional housing paradigms. 1 The deterioration of the natural environment, like climate chaos and the pandemic spread, has reduced the scope of human existence, and the upheaval of the social environment, such as socioeconomic turmoil and geopolitical conflicts, has forced inhabitants to move away from their homelands in search of new domiciles. Simultaneously, advancements in digital technologies including artificial intelligence have augmented the spectrum of choices available to individuals and communities, giving rise to a diversified and personalized trend in lifestyle preferences. Voluntarily or involuntarily, people have gained newfound freedom—digital nomads with extreme mobility have emerged: liberating work and leisure from time and location constraints by embracing mobile communication and smart technology. 2 Amid the outbreak and spread of COVID-19, there has been a substantial and ongoing increase in the population of digital nomads constituting the present-day workforce. 3 In the participants’ core ethos, minimalism, uncertainty, and risk replace material accumulation, stability, and comfort. 4 However, behind this carefree lifestyle, there may be implications of the inability to afford housing expenses. In many social realities, there is a growing disparity between aspirations for homeownership and the actual expectations of achieving it. 5 The coexistence of “unwilling to buy” and “unable to afford” contributes to a mobile way of life with frequent changes of residence. 6
In this context, traditional rigid homeownership and its methods of transaction and operation are encountering unprecedented impact. 1 Is it feasible for individuals to entirely relinquish the traditional ownership model and explore forms of “minor tenures” 7 ? Intermediate ownership, including renting, getting licenses, or sharing, emerges as a viable alternative. 8 On the one hand, digital rental-focused platforms, such as Airbnb and Vrbo, offer immediate rental services. However, participation in exchanges within those platforms predominantly revolves around usage rights, representing only a fraction of ownership. This tendency could potentially correlate with a low sense of belonging, 9 insecurity, 10 and even cause disruptive events. 11 On the other hand, shared housing has become another avenue, gradually evolving from a transitional phase into a long-term housing solution. 12 Emerging shared housing platforms like Common and Old Oak indicate the growing value of collaborative consumption in the private rented sectors, 13 but fundamentally, they still involve sharing the right to use the spaces. Genuine co-living is more akin to the concept of a communal apartment 14 in socialism, where the private space constitutes only a small part of the overall housing, and the majority is a collectively-owned public area with blurred ownership boundaries. Nevertheless, whether through co-renting or co-owning, there are potential threats to personal privacy and an increase in residential conflicts. 15
The significance of homeownership may far exceed people’s expectations. Existing ownership practices seem to have limitations, prompting us to ponder whether there exists a new ownership model that meets the requirements of mobility and fluidity, allowing individuals to enter with low barriers, scale or shift based on their variable needs and economic status, achieving the vision of “not being evicted in times of adversity and expanding the domain in times of prosperity.”
This paper proposes the OTDF Platform as a novel homeownership transaction channel. It treats housing as a user-driven distributed system and establishes a cycle of ownership through tokenization, digitization, and fluidization. In terms of methodology, the platform employs a variety of AI-assisted algorithms to intricately link user requirements and expenditures, the state of residential space, and ownership value parameters, demonstrating a clear ownership calculation method with nested functional relationships.
Evolution of housing ownership: The value resurgence as a home
Ownership pertains to the owner’s right or state to possess, utilize, benefit and dispose of property, 16 and its evolution has activated diverse models of private property rights that shaped the principal economic frameworks of society.1,17 In the context of real estate, housing ownership forges a profound association between people and land 18 (living spaces), turning residence an accumulation of property and a manifestation of authority, nurturing the formation of personal belongingness 19 and the preservation of social stability.1,20 In modern societies, urbanization has led to the division of house property rights, enabling individuals to possess private residences. The establishment of property laws has provided a solid foundation for precise and stable housing ownership, ensuring the legitimacy and stability of property rights. 21 However, with the development of housing privatization and capitalist market economies, housing has transcended its roles as a home, a cradle, and a shelter, acquiring the added connotation of an investment commodity. 22
In the traditional capitalist housing market, the transfer of classic rigid ownership often entails one-time substantial monetary transactions. The dominant bourgeoisie prolifically invests in and stocks up houses as commodities, while marginalized urban populations constantly grapple with concerns about securing a place of abode. More homeless residents than during the Great Depression, with over half of households unable to afford the rent—these portray the grim reality of the housing crisis in New York. 23 Fluctuating property prices in China 24 and the catastrophic crash of the jeonse rental system in South Korea 25 also reveal that excessive reliance on real estate investment can exacerbate economic inertia and vulnerability. The profound dissonance between use and exchange value 21 constitutes a significant peril to the housing market, where dwellings in many regions cease to be homes and are transformed into reservoirs of capital.
Within the widespread expansion of privatized residential ownership, there have also been counteractive and innovative practices that signify a response to mitigate potential hazards arising from the excessive commodification of housing. Public housing ownership emerges as a significant avenue in this direction. Commencing in the 20th century and driven by socialist ideologies, concepts such as housing cooperatives emerged in countries like the Soviet Union, publicizing the ownership of housing that belonged to the bourgeoisie. Haciendas and Apartments were redistributed among workers and peasants, offering private rooms and shared facilities such as communal kitchens, bathrooms, and corridors that catered to the needs of multiple families. 26 Similar conditions occurred in China, where Siheyuan was rearranged by the working class. 27 In the late 1960s, the Co-op City project 28 was established in the Bronx, New York City, where residents acquired shares in their apartment units and became cooperative members. Monthly fees were paid to maintain and manage common areas and parking lots. This model aimed to provide affordable housing for middle-income families while encouraging community participation.
Evolutionary ownership over time presents a new way of thinking. An illustrative instance is the Quinta Monroy in Chile. 29 In this project, architects adopted a strategy of constructing half of the structure and equipment within a constrained budget. Residents were encouraged to autonomously expand within reserved spaces, which allowed nearly 100 impoverished families to own homes in the city rather than being marginalized to peripheral areas. This adaptable framework embodies an ownership model with a time-dimensional evolution. Initially allotted half the area, people could double the property value through subsequent efforts and labor, progressively contributing to the establishment of security and a sense of belonging.
Housing ownership in platform real estate
In recent years, platform capitalism 30 facilitates interactions between diverse groups, allowing users to create their own products, services, and marketplaces, enhancing the circulation of ownership. Specifically within the real estate context, such technological adaptations are termed “platform real estate,” which better encapsulates the connective capacities and paths of action related to ownership, use, and exchange of land and buildings. 31 Real estate digital platforms, through online transaction models and convenient user experiences, circumvent the complexities in conventional real estate market operations, significantly simplifying housing rental and sale processes, and in some scenarios driving changes in housing ownership. Common categories include property investment platforms and property sharing platforms.
Real estate investment platforms are driving the fragmentation of housing ownership. 32 Examples such as Roofstack 33 and RealT 34 utilize blockchain technology to divide property ownership into fractional shares, representing the ownership as digital tokens. Investors can purchase these tokens and earn returns. While this innovation attempts to transform housing ownership and lower the entry barriers for ordinary individuals to engage in real estate investment, it also intensifies the commodification of properties.
In contrast, property sharing platforms facilitate rapid and precise matching between property owners and seekers, enabling short-term leases of spaces. However, in most transactions, what is offered is the right to use the space, while the ownership remains securely intact in the hands of the original owner. Representative examples in practice include Airbnb and WeLive, primarily focusing on rental services, which can trade limited ownership like use rights. Airbnb allows common homeowners to rent out vacant rooms of varying sizes, forms, and durations. 35 This implementation slices the right of use and enhances the refined utilization of spaces, subverting traditional formal leasing approaches. WeLive strives to create shared living spaces for users, with the corporation holding centralized static ownership and distributing mobile usage rights to tenants. This approach encourages users to freely share and exchange spaces, organize collective activities, foster social networks, and reclaim the therapeutic attributes of the community. 36
Housing ownership models in new architectural paradigms
The emergence of new architectural paradigms and technologies in the second digital turn, 37 including discrete architecture 38 and spatial assembly, 39 along with the application of artificial intelligence algorithms in the field of architecture, has introduced fresh perspectives for online housing platforms, encouraging research and experiments into novel ownership models. The project “Nomas” 16 has set up an ownership exchange system: users possess stable spatial states within the platform and can switch between different locations worldwide to adapt to global nomadic lifestyles. In this case, although ownership undergoes digitization and location conversion, it does not involve rapid scaling triggered by quick transactions. Another project, “Public Parts,” 40 introduces an autonomous communal living platform managed by artificial intelligence, employing a cooperative-style ownership mechanism, where occupants share ownership of the housing community, engaging collaboratively in space assembly and system maintenance. This project establishes a user-driven resocialized community with a communist essence. 1 However, to some extent, it relies on users’ high ethical standards and technical proficiency.
The convergence of housing ownership and usage rights
Surveying the evolutionary trajectories discussed above, the integration and circulation of ownership, which can mark the commercial attributes of housing, and usage rights, which represent its residential nature, constitute the central theme of research. In the traditional capitalist housing market, commercial attributes gradually outweigh the extremely rapid growth of housing prices. Amid the recent advancement of platform real estate, investment platforms exclusively hinge on commercial attributes, while sharing platforms allow for the swift circulation of residential attributes within the confines of commercial attributes.
The convergence of ownership and usage rights signifies a resurgence of housing value. From the perspective of residents, it offers emotional advantages such as sustained belongingness. From the perspective of society, it simplifies rights structures and promotes social stability. Currently, digital real estate platforms present new research contexts. Leveraging this background and technology, this paper aims to further explore novel homeownership models, enhancing adaptability and ensuring the unity of ownership and usage rights, providing a new housing paradigm for digital nomads and other groups with spatial change or migratory needs.
OTDF platform: A new type of homeownership concept
In response to contemporary lifestyles characterized by mobility and liquidity, along with the prevalence of diverse and extensive living arrangements, this study aims to delve into the profound discussion of the interrelationship between flexible homeownership and its corresponding spatial dynamics, establishing a housing transaction platform (OTDF platform) with a cycle of ownership through tokenization, digitization, and fluidization. This platform hosts a user-organized global housing system, incorporating artificial intelligence algorithms to match living demands, calculate spatial changes, and facilitate free ownership transactions and rapid circulation.
The OTDF platform primarily comprises three key elements: users (u), ownership (o), and living spaces (s), which are powered by underlying blockchain technology and AI-assisted algorithms. As the core of the platform, users possess dual roles as both demand and transaction entities, which can be deconstructed into two variables: user demand (d) and user cost (c). Initially, users input their behavioral and social demands into the Space Planning Algorithm (P) to shape the living spaces. Subsequently, the Rights Accumulation Algorithm (A) calculates the value of digital ownership, and finally, the Value Exchange Algorithm (E) determines the number of tokens users need to pay (Figure 1). It is essential to note that the economic cost for users is a function of their demands, and the hierarchical calculation process will be detailed in the subsequent sections. System structure and the TDF process.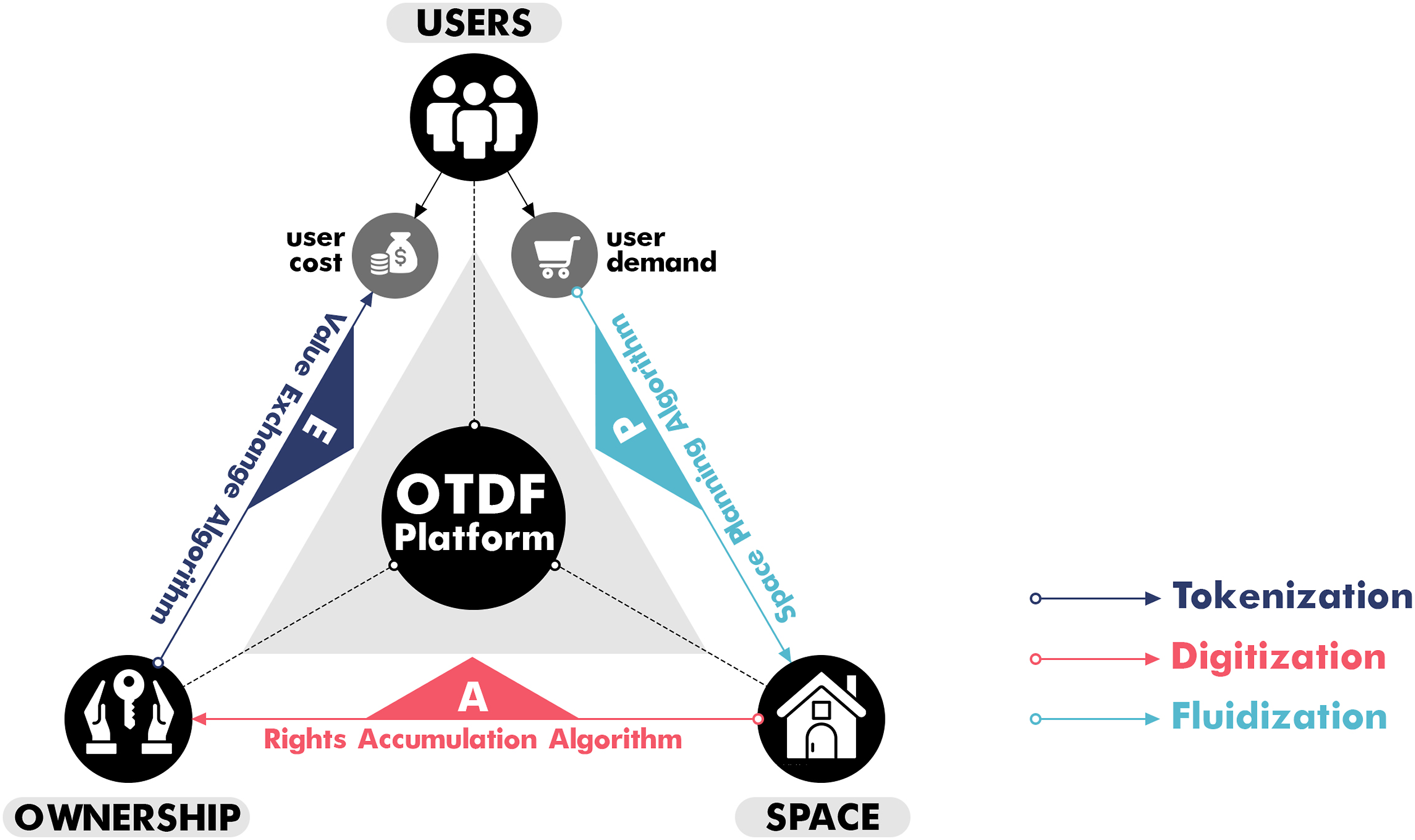
The functions




leads to the derivation:

(r: token exchange rate, linked to property prices)
The tokenization, digitization, and fluidization of ownership are achieved in this computational process, and their specific interpretations are as follows: 1. Tokenization: The representation of ownership status through tokens within the interaction platform, involving the encryption, storage, and transfer of ownership information. 2. Digitization: The precise calculation of ownership value using discrete spatial voxels, enabling an accurate correspondence between space occupancy status and ownership. 3. Fluidization: The transformation from changing demands into adaptive spaces utilizing multi-agent algorithms based on reinforcement learning, thereby encouraging the scalability and displacement of ownership among individual users, as well as negotiations and transactions among multiple users.
Ownership tokenization contribute to free transaction
The OTDF platform utilizes blockchain technique 41 to achieve ownership tokenization, which facilitates the separation of ownership from geographical locations or territorial belongings, allowing for real-time expansion, contraction, transaction, and circulation. In alignment with this, living spaces are transformed into transferable units on the blockchain infrastructure, where their value information and transaction records can be securely stored in a widely distributed peer-to-peer computing network. Consensus algorithms 42 ensure information replication across nodes without central administration.
The platform employs a digital identity verification module to authenticate the identities of new users during the onboarding process, ensuring the authenticity and legality of all parties involved in ownership transactions. Each participant possesses a unique identity, with authorization and permission management administered via access control lists. Following identity registration, users can purchase and hold a specific amount of tokens (t) using local currency based on local property price levels. These tokens can then be exchanged for corresponding residential space ownership within the platform.
Tokenized ownership offers a high degree of fractionalization, reducing entry barriers so that even financially disadvantaged individuals, who may not have substantial savings, can opt to initially possess a private space as small as a bed, mitigating the risk of eviction or homelessness. When users experience changes in their economic circumstances and need to adjust the living scope, they can simply sell ownership of unneeded space and acquire the desired portion. Typically, these transactions occur directly between users, with the platform only charging a modest fee (f), which is allocated towards scenarios such as space reconfiguration, facility maintenance, and energy supply. In rare cases where users express a strong inclination to divest their ownership, the platform may engage in buyback as a safety net to alleviate users’ financial burdens. Transaction fees between users are considerably lower than those between users and the platform, incentivizing peer-to-peer transactions to foster negotiation and mutual assistance among users. Furthermore, the platform allows for equivalent remote ownership exchanges, where tokens can circulate among different regional stations and be exchanged in accordance with varying local property values to support a mobile lifestyle. All of these processes are executed and supervised through smart contracts, achieving disintermediation while ensuring the compliance and transparency of transactions.



Ownership digitization based on space discretization
The OTDF platform necessitates a method to precisely correlate digital ownership with physical spaces. Voxelization is one of the potential solutions and represents a straightforward approach employed to support elementary value quantification models.
Specifically, within a base station, the construction scope is delineated based on geographical location and building density, and its total ownership value is estimated through the assessment of property prices and the surrounding conditions. The scope is subdivided into a three-dimensional grid composed of discrete voxels, each corresponded with fragmented ownership. The scale of the voxels can be determined in line with the architectural module or ergonomic scale in the station.
Each node (N) within the grid contains basic information such as an identifier, coordinates, and shape, as well as multi-level characteristic information relevant to habitation, including lighting conditions and scenic views. Characteristic information is directly associated with the ownership value of each node. For instance, nodes with sufficient sunshine on the site typically have higher ownership values compared to those with limited lighting. The superimposed ownership value for each node is computed through the product of various types of information, denoted as “I” and value coefficients represented as k (Figure 2). Characteristic information can be obtained through on-site measurements or software simulations, and imported in the form of formulas or bitmaps. These data are then remapped to form a three-dimensional matrix with an average value of 1. The coefficient k reflects the recognized significance of a particular node’s characteristics in a given area, determined through extensive statistical analysis. For example, colder regions might prioritize ownership value related to lighting and insulation, leading to higher k-values associated with these environmental factors in the calculations. The space node and its associated multi-level information in a three-dimensional discrete grid.

At this stage, the traditional notion of complete property ownership of a house undergoes a transformation into the occupation of discrete grid nodes within that space. Therefore, the composite ownership of all nodes within the residential spaces constitutes the user’s overall ownership within the platform.


Ownership fluidization driven by demand variation
The fluidization of ownership within the OTDF platform relies on the dynamic shifts in user residential requirements. Providing real-time space solutions that align with these needs, essentially uncovering the correspondence between demands and spaces, represents a technical challenge and a pivotal step in the platform’s operation. Therefore, this research has developed a User-Centric Distributed Space Planning Algorithm (UDSPA), 1 which operates within a framework of multi-agent systems, integrating both bottom-up local agents and top-down global constraints to harmonize diverse elements and relationships, including user requirements and site conditions. Furthermore, the integration of reinforcement learning enables the autonomous behavior of agents, aiming to maximize adaptation to the changing residential and social needs of users and accomplish optimal spatial layout configuration and reconfiguration.
The space planning algorithm operates within the virtual environment formed by the three-dimensional grid mentioned above, employing a group of programmable agents along with spatial generation modules and negotiation modules that control their behavior. Generally, each spatial agent represents a room belonging to a user, manifesting as an internally enclosed voxel set with a specific shape and location. The basic attributes of an agent include color, serving as an identifier determined by the questionnaire administered upon user onboarding, reflecting personal characteristics; pheromones, acting as mediators for interactions among system elements (agents and the environment); and capacity, defining the threshold of nodes that can be occupied. The characteristic attributes of an agent encompass the Generation Code (G_Code) and Negotiation Code (N_Code), serving as core parameters for two modules, which encapsulate the users’ requirements regarding spatial units and their organizational relationships, determining ownership allocation and circulation.
Ownership calculation according to space configuration
For an individual user, the demand for personal residential units (dg) guides the generation of living spaces, leading to the corresponding ownership. In UDSPA, this demand is described by the G_Code, shaping the local target of the agent’s planning behavior. Regarding its setting, G_Code can be directly input or selected by users within the interactive interface or generated and recommended by the platform based on historical records and preferences. In terms of content, it can consist of various descriptive parameters specific to the spaces, exemplified by fundamental and straightforward data containing volume (v), proportion (p), and form (f) in this stage. These parameters represent space size, the aspect ratio of the bounding box, and the basic shape of the required space (Figure 3). Depending on application scenarios, G_Code can also incorporate more complex metrics related to spatial connectivity, transparency, and other factors. Typically, a string of G_Codes links to one residential unit (a room) for a user, and each user can set multiple G_Codes. In this context, the variable “s” can be quantified as a collection of multiple parameterized spaces “si” with diverse characteristics. A G_Code example and the parameter analysis.



The Space Generation Module (Pg) operates on the agent’s spatial occupancy pattern, utilizing G_Code parameters to realize space generation through iterative computations. At the start of the planning process, the agent initializes at a user-specified location and establishes perception with other agents and the environment by releasing and reading pheromone codes to adjacent nodes
43
in Von Neumann Neighborhood.
44
Simultaneously, this module extends the principle of stigmergy,
45
constructing real-time evaluation rules (Eva_G) based on user demands and the current spatial state. It systematically computes the deviation values for target scores {v, p, f} in comparison to the expected scores of occupying each adjacent node within the current range. These values are mapped to a unified [0,1] range using corresponding weights and then summed, resulting in a sorted list of deviation values. The node with the lowest (or highest) score in the list is selected for occupancy, representing the one most aligned with the current requirements.



To further refine agent behavior control to prevent local optimal solution and achieve coordination across multiple targets, reinforcement learning
46
is applied to expand decision-making patterns beyond the direct selection of extremum, enabling the agent to dynamically respond to G_Code, intelligently selecting points for occupancy in the deviation value list, thereby maximizing the fitness of the generated space. Specifically, the training target dataset consists of 600 sets of G_Code generated by the cross-combination of {v, p, f} within a defined range. The action set of the agent comprises 21 types, where actions 0 and 20 correspond to the extremities of the deviation value list, while others are determined by converting to percentages and multiplying with the number of neighbors. Reward settings include immediate rewards (occupying a point within the target range), episodic rewards (achieving a proportion of 30% or 60% within the target range), and final rewards (achieving a proportion exceeding 95% within the target range). After 6*106 episodes, the training stabilizes with the fitness for each G_Code exceeding 95%, enabling the agent to perform space generation tasks effectively (Figure 4). The training mechanism and results of reinforcement learning1.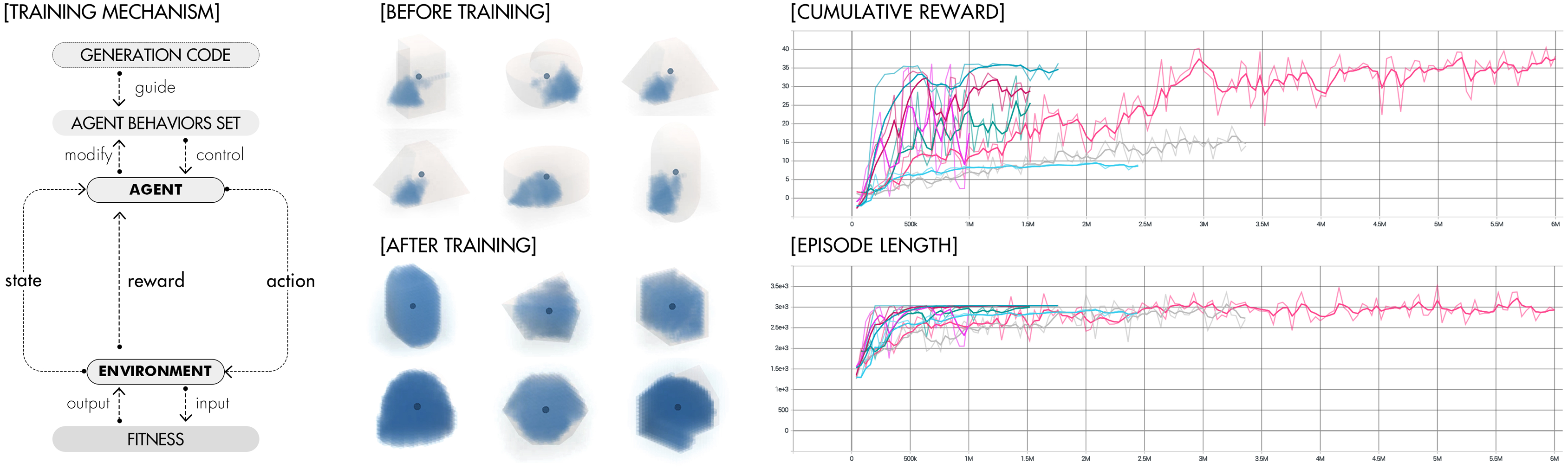
Ownership circulation corresponding to space reconfiguration
For multiple users, the circulation of ownership stems from the organization and reconfiguration process of spatial units, influenced by users’ organizational intent, system layout constraints, and collective interests. The algorithm employs the N_Code to guide the operation of the spatial negotiation module (Pn), which controls behaviors such as attraction, repulsion, deformation, or displacement among multiple agents, facilitating the negotiation and alteration of spatial occupancy in response to users’ negotiation demands (dn). The setting of N_Code is also derived from user interaction, with some parameters constrained by the system. N_Code consists of three types of parameters describing spatial relationships that correspond to the evaluation rules (Eva_N) within the Pn module: (1) Adjacency Tendency: The weight parameter “a” with values in the range [–1,1] represents the willingness of agents to interact with neighboring agents. Specifically, the module generates attractors along the line connecting the centers of two agents based on “a,” and computes the corresponding deviation values according to the distance from neighboring nodes to the attractors. (2) Group Tendency: The weight “g” within the range [–1,1] depicts the relationship between an agent and spatial clusters of similar or contrasting colors. The module computes the deviation by multiplying the difference between the agent’s color and the pheromone color in neighboring nodes by “g”. (3) Environment Tendency: The set of weights “e” in [–1,1] signifies the degree of an agent’s thirst for environmental resources (Figure 5). For different environmental information integrated into nodes, the module calculates the product of the values and corresponding weights, leading to specific behaviors like seeking or avoiding light. The final spatial state results from a combination of the Pg module guided by G_Code and the Pn module guided by N_Code. An N_Code example and the parameter analysis.




(
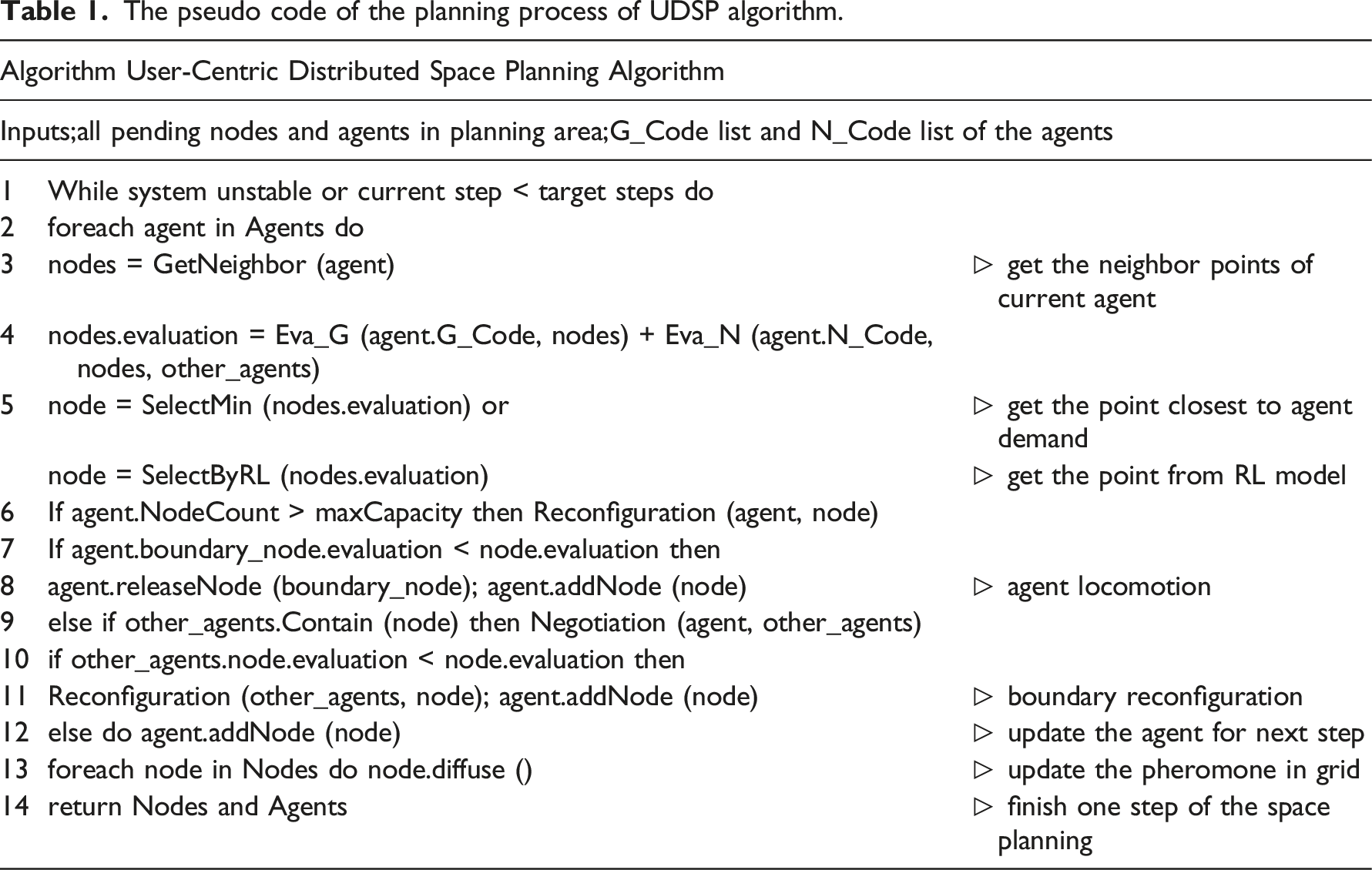
Based on the aforementioned modules, the operation of this algorithm, referred to as Ownership Fluidization, can be delineated into two stages (pseudocode shown in Table 1): 1. Multi-agent spatial generation and organization process: Each agent expands outward according to two types of demands and external influences until overlapping neighborhoods emerge. Following the principle of maximizing collective interests, spatial boundaries are formed by comparing the evaluation scores of the node for each of the two. The node is then occupied by the agent with the smaller deviation value (greater demand) (Figure 6). 2. Multi-agent spatial change and reconfiguration process: Triggered by a user proposing spatial changes and modifying their codes, the system inquires whether neighboring agents are willing to participate in the adjustment. If the negotiation is successful, their agents and the occupied nodes enter a pending state, and changes in the code alter the evaluation scores, prompting multiple agents to update occupation or release behaviors for reshaping spatial boundaries. The pseudo code of the planning process of UDSP algorithm. The interface of the UDSP algorithm in Unity3D.
Throughout these processes, the system continuously calculates ownership and token values based on the new spatial state, with the initiation party bearing the transaction fee. Users who positively respond to evolving demands have the opportunity to receive platform bonuses.
Experiment: Virtual life sustained by the OTDF platform
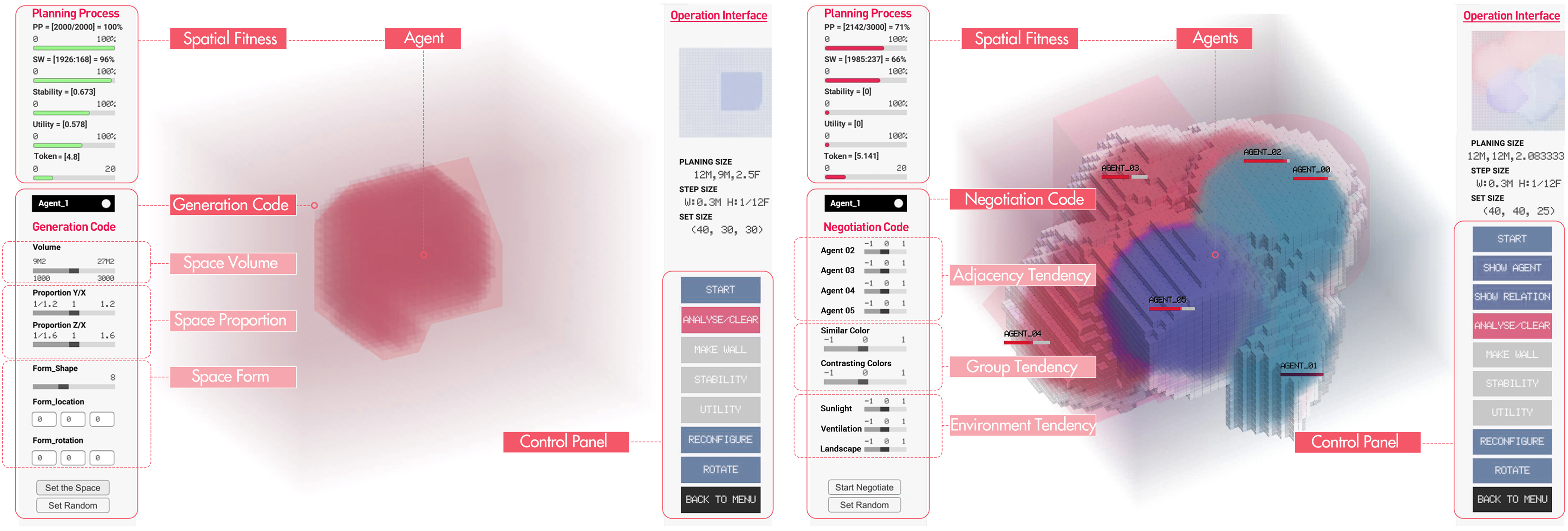
To validate the efficiency and the synergistic mechanism of the OTDF platform, a comprehensive user interface was developed within Unity3D (version 2020.3.16), seamlessly integrating various functions, including user information collection, ownership statistics, and space planning (Figure 7). The subsequent case study presents results from experiments involving three subjects. The experiments were carried out using a laptop computer equipped with a 3.30 GHz Intel Core i7-11370H processor, 16 GB of RAM, and an RTX3070 GPU. The average time it took for an agent to occupy a single voxel was 0.0637 s. User interface integrating information collection, ownership statistics, and space planning.
Each participant had the right to request adjustments to their individual space or initiate space negotiations at hourly intervals. Specifically, they could directly add or remove agents on the interactive interface and modify the values of {v, p, f} and {a, g, e}, guiding the space planning algorithm to generate new spatial states. To expedite the experiments, a stipulation was made that every 5 min corresponded to an hour, allowing each experiment to be completed in approximately 2 h. The platform meticulously recorded the evolving patterns in user demands, space capacities, ownership, tokens, and other pertinent data throughout the experiments.
The site scope was determined as 13.5 m*9m*4.5 m. A voxel size of 0.3 m*0.3 m*0.3 m was chosen as an example, aligning with ergonomics, and enabling the direct modeling of spatial details to create a discrete spatial esthetic. The initial three-dimensional grid was (x, y, z = 45, 30, 15), resulting in a total of 20,250 voxels. The addresses of the experimental base stations were randomly selected by three participants, with the primary light-exposed facade located to the south and the main view-oriented facade situated to the west. The two sets of environmental data were imported in bitmap format, and their overlay proportions were determined according to the average preference of all users in the system (sunlight 0.67; landscape 0.33), which was finally discretized and mapped into grid nodes to form global constraints (Figure 8). Gantt chart depicting daily schedules and agents’ persistence.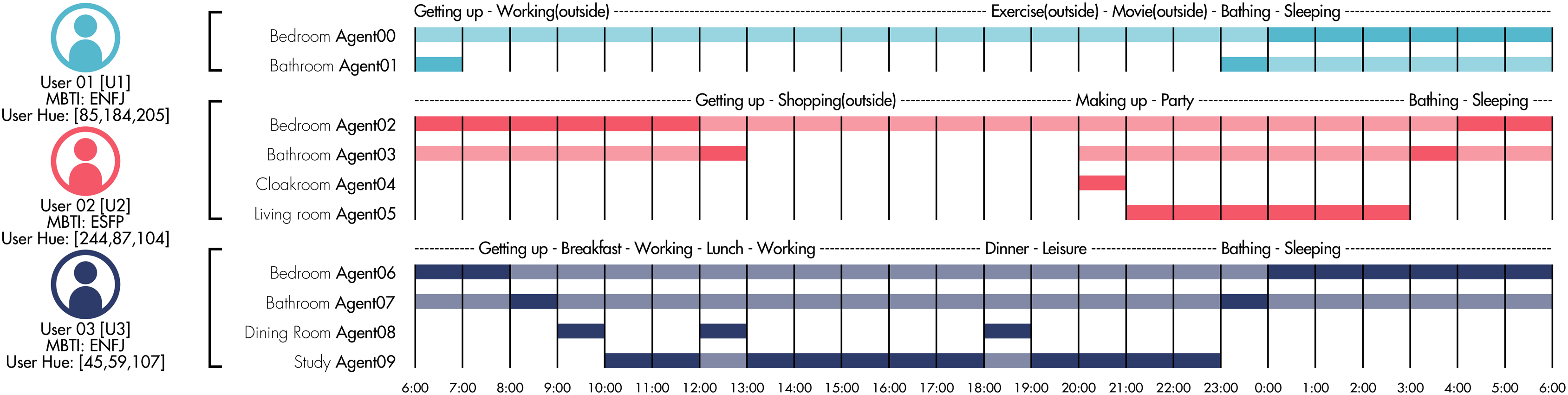
A typical experimental result was selected for data analysis. The three participants displayed exhibited distinctly diverse characteristics during the process of demand collection. Figure 9 depicts specific daily schedules and corresponding temporal segments for the agents. User 1 took up residence in a hotel-like manner, only acquiring or expanding basic private spaces such as bedrooms and bathrooms (Agent00–01) during nighttime. User 2, apart from occupying personal spaces, arranged temporary entertainment spaces within the system (Agent02–05). Users 1 and 2 both aimed to relinquish or reduce ownership shares during their absence and were willing to pay transaction fees for this. This operation increased personal asset liquidity, facilitated short-term investments, and freed up more space resources within the system. In contrast, User 3 organized both workspaces and living areas within the system (Agent06-09). Based on the information above, the agent operation tests revealed that 10 agents underwent a total of 36 displacements or deformations at about 15 time points of which involved multi-user negotiation at 3 time points, emerging as diverse cluster patterns (Figure 10). Interface for agent adjustment and environmental data input. Phenomena of space generation and negotiation during the experimental process.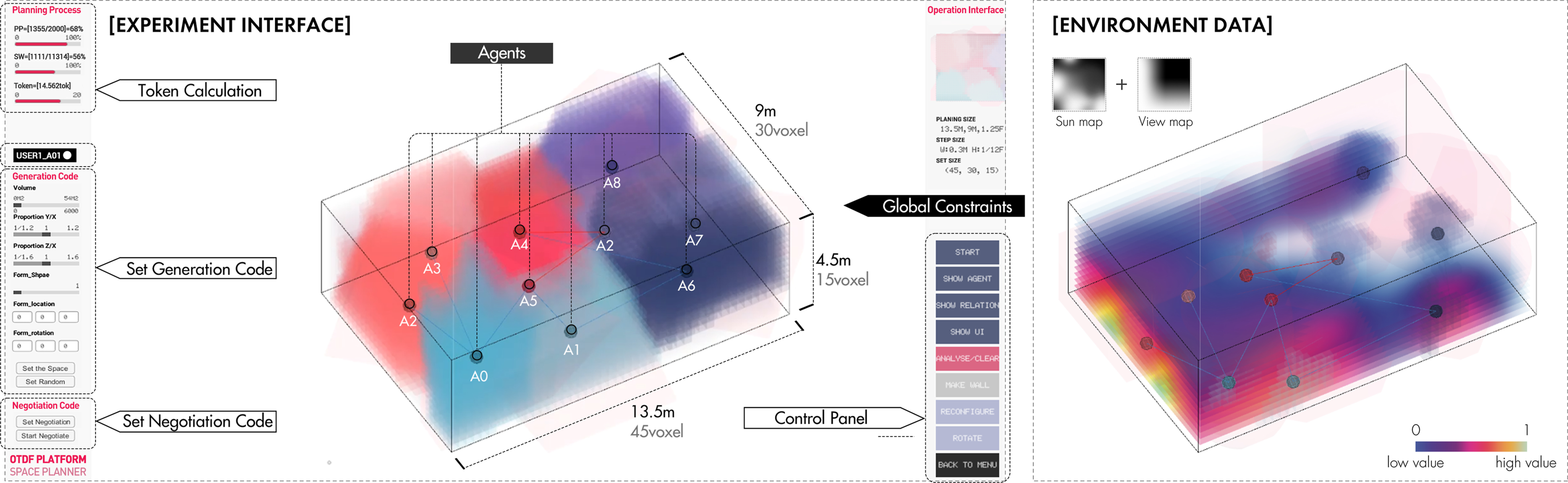
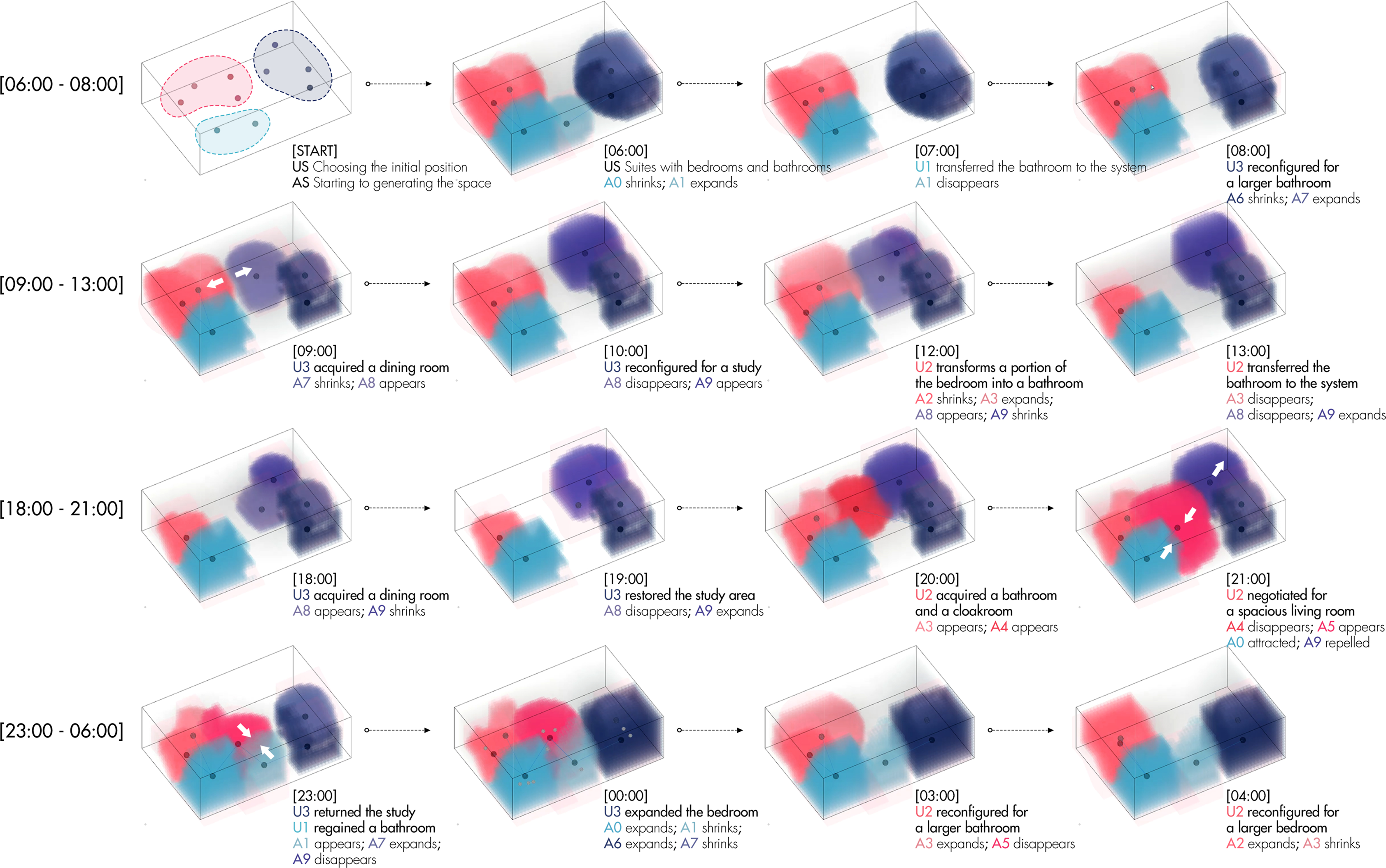
In the experiment process, sunrise time (6:00 a.m.) was defined as the initial state of the experiment, with all three users occupying only bedrooms and bathrooms at this time. Subsequently, during the morning hours (7:00–12:00), User 1 went out and disbanded Agent 01 while User 3 initiated activities at 8:00, leading to agents’ configuration in response to activities like meals and work. In the afternoon (13:00–18:00), User 2 reduced the volume of Agent 02 and transferred Agent 03, resulting in a noticeable decrease in the number of occupied voxels. In the evening (19:00–5:00), negotiations between agents took place when multiple users were situated in the system. For instance, at 21:00, User 2 desired to add a spacious living room for gathering and sent negotiation invitations. User 2 successfully reached an agreement with User 3, who was willing to transfer a portion of Agent 09.
After the experiment was completed, data such as changes in ownership of each user were exported, and graphs were generated for subsequent analysis. Regarding voxel quantity variations, noticeable declines occurred for User 1 during 7:00–22:00 (from 3844 to 2879) and for User 2 during 13:00–20:00 (from 3796 to 1000), indicating a behavior pattern of releasing voxels when they are out. User 2 exhibited more pronounced variations, with a standard deviation of 19.80, illustrating his propensity to retain only a small portion of volume while absent. In contrast, due to User 3’s work-from-home arrangement, the daytime period (9:00–23:00) saw a moderate increase in voxel quantities compared to nighttime. The growth was smoother, with a standard deviation of 4.79, attributed to User 3 compressing existing spaces to create new areas (Figure 10). In terms of changes in ownership, the fluctuation trends were basically the same as that of the voxel numbers, but the ranking of the three users underwent shifts, reflecting the influence of environmental conditions on ownership (Figure 10): User 1 occupied the most favorable part of the environmental resources, hence facing higher costs. This phenomenon was evident in the average voxel value as well (Figure 11). Additionally, compromises and collaboration during negotiations played a role in gaining system concessions and lowering average costs. At 21:00, User 3 transferring ownership to User 2 led to a slight reduction in the average voxel value. Spatial satisfaction is a numerical indicator measuring the degree to which the space planning algorithm responds to user demands. It is derived from the ratio of voxels occupied by agents to the total voxel count within the expected planning scope. The average satisfaction levels for all three users exceeded 70% (70.01%, 89.89%, 79.23%), demonstrating that the agents effectively catered to various spatial change requirements (Figure 12), reflecting the accuracy and flexibility of the algorithm. Temporal evolution of ownership and voxel quantities across three users. Temporal variation in average voxel prices and space fitness across three users.

Discussion: Towards a new architectural paradigm
In the OTDF platform, free trade and rapid fluidity of ownership can create substantial economic potential. For individual users, relinquishing ownership corresponding to underutilized spaces can free up a portion of their fixed capital, which can be redirected towards more versatile and income-generating economic activities. Conversely, when in need of additional spaces, acquiring new ownership shares can save costs compared to temporary space rentals (Figure 13). In the long term, this approach can offer convenience to users while generating significant additional benefits, as well as fee-based revenue for the platform. Therefore, spatial resources can be efficiently reused, essentially reducing space construction and demolition costs and mitigating the binding effect of space on assets, which has great significance in addressing the widespread housing issues. Economic potential in the OTDF platform.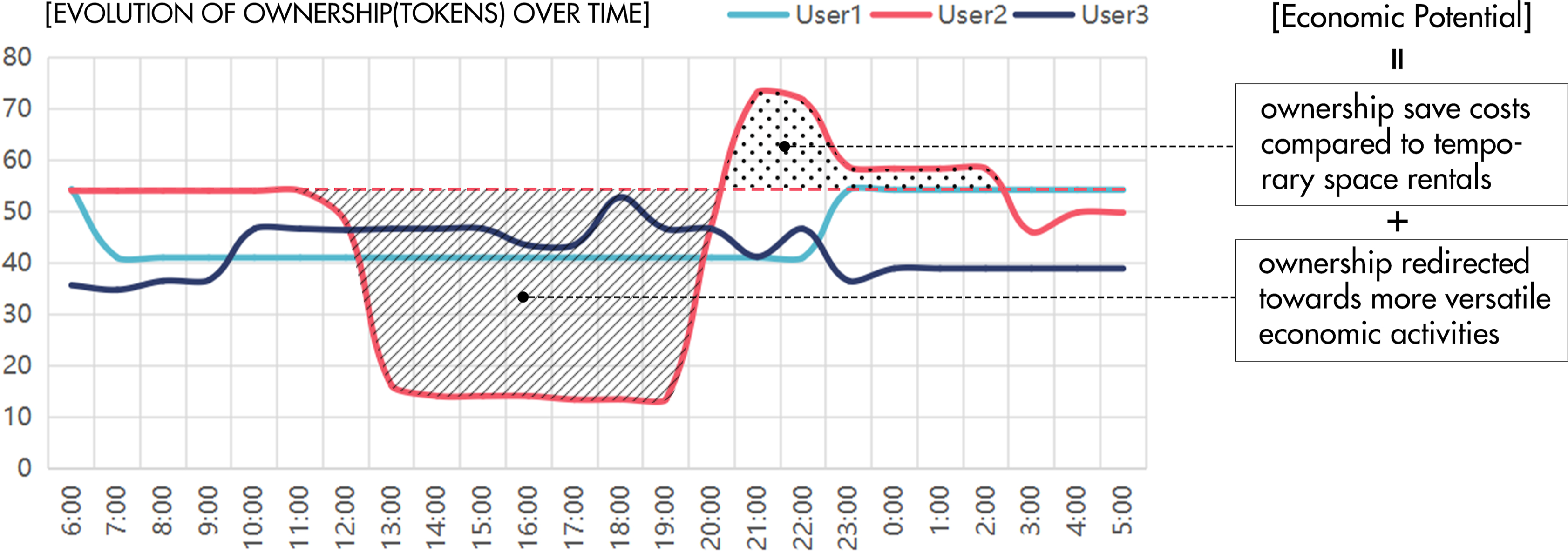
Besides, the real-time mapping of abstract ownership and virtual spaces into physical constructions is a topic worthy of consideration. As an extension of the platform, we have developed and tested a material system composed of distributed robots and static components. The static components are bricks that shape space boundaries by stacking and interlocking with voxel sizes identical to those in the platform, while the robots are equipped with power and communication units, reconfiguring spatial arrangements by actively altering the positions of the static components
47
(Figure 14). Reinforcement learning is also implemented to control the behavior of robots, granting them autonomy to automatically adapt the physical construction status in response to changes in space and ownership, maintaining an uninterrupted user experience and preserving a dynamic balance. Nonetheless, this solution represents just one potential example or a conceptual direction rather than a universally standardized solution. The high resolution and flexibility of this platform enable it to accommodate a wide range of ownership materialization methods tailored to different application scenarios, such as lower-resolution movable walls, to attain optimal efficiency and effectiveness. Distributed material system47.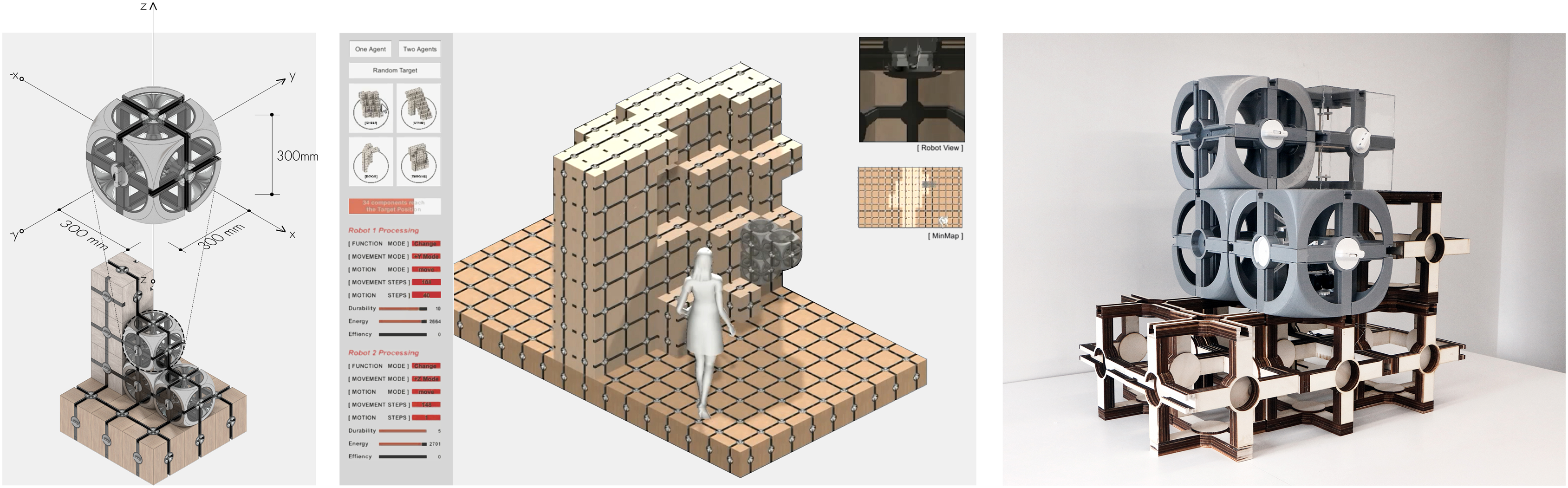
Conclusion
In the post-digital era, life with mobility and liquidity provides a unique research context. By re-examining the traditional static housing ownership and the separation status of owning and using, this study introduces an OTDF platform that integrates users, ownership, and living spaces and proposes methods for ownership tokenization, digitization, and fluidization, delving into a new homeownership model as well as the expected vision of co-living in an autonomous housing system in the post-digital era.
Compared to previous research, 1 this study focuses mainly on in-depth discussions of the platform part. Methodologically, by exploring the quantification mode and close interconnection of three elements, research not only proposes a new systematic platform framework, but also establishes a cyclical computational process and deepens the corresponding hierarchical algorithms. Furthermore, in the experimental section, the development of interactive software and the tests involving real users, more agents and environmental conditions more effectively validate the feasibility and efficiency of this platform.
The OTDF platform not only validates the concepts of new capital and digital intelligent design but also leads the trend of ownership mobility and redistribution, which provides equal and direct decision-making and interaction accesses for different groups, effectively coordinating various refined housing demands. Its flexible digital ownership model transforms the concept of property from a territorial attribution to a digital symbol, accomplishing the unification of ownership and use. As a forward-looking trial, this platform will catalyze a revolution in the residential industry, activating the emergence of novel work and living approaches. Furthermore, rooted in the context of autonomous architecture,
47
this platform facilitates the development of a flexible and evolving new architectural paradigm that advocates architecture to become self-organizing, self-adapting, and self-evolving living entities (Figure 15). Expected living scenarios in the OTDF platform.
In future work, conducting more simulation experiments based on real cases and data involving more actual users holds significant importance. For space planning algorithms, more assessment mechanisms for living spaces, like usability and topological relationships, along with their visualization methods should be integrated in the platform, enabling better control over the rationality of generated spaces. Additionally, a thorough investigation into compatible material systems is required, considering appropriate water, electricity, and plumbing configurations, as well as the cost, noise, and maintenance of robotic systems. Constraints such as structural stability and life infrastructure should also be included in the algorithm.
OTDF platform presents a well-considered homeownership vision and technological prototype. As a promising starting point, it demonstrates the unwavering courage and impartial stance to address the challenges of the post-digital housing issues.
Footnotes
Acknowledgments
This research is an extended and in-depth exploration of a part of the project TESSERACT conducted at the University College London, the Bartlett AD Research Cluster 3, Living Architecture Lab. Project team members: Jiaqi Wang, Wanzhu Jiang, Ying Lin, and Zongliang Yu. Supervisor: Tyson Hosmer, Octavian Gheorghiu, Philipp Siedler, and Ziming He.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.