
Abstract
Telepresence robots represent a comparatively little considered possibility for the realization of hybrid teaching. These robots enable students to participate remotely in classroom activities by offering a mobile platform for video conferencing.
Researchers have argued that their use fosters a sense of autonomy, competence, and relatedness. However, this claim has not yet been adequately investigated. Based on self-determination theory, our study investigated the impact of telepresence robots on the satisfaction of students’ psychological needs for autonomy, competence, and relatedness, as well as their intrinsic motivation. In a 1 × 3-factorial within-subjects design, 36 psychology students attended one seminar session via telepresence robot, another via 360-degree camera (control condition), and participated in person during the remaining sessions. Following each session, students’ basic psychological needs satisfaction and intrinsic motivation were measured using an online questionnaire. A MANOVA showed significant differences between the three participation conditions in all three psychological needs. Students’ perceived autonomy, competence, and relatedness were higher after participating via telepresence robot than via camera, but lower than after face-to-face participation. The students’ intrinsic motivation did not differ between the two technology conditions. These findings suggest that the choice of digital tools in educational settings significantly affects students’ satisfaction of basic psychological needs.
Keywords
Introduction
Various solutions for online learning have emerged as digitalization progresses, especially accelerated by the COVID-19 pandemic. These technologies enable students and educators to participate in class when physical presence is not possible due to health-related reasons, natural disasters, or similar circumstances, to use additional online resources, or, for example, to make learning flexible so that it can be done alongside work. While the COVID-19 pandemic initially accelerated the adoption of remote and hybrid teaching formats, recent surveys suggest that these practices are becoming a permanent fixture of higher education. For instance, the OECD (Broberg & Golden, 2023) reported that 19 out of 30 countries participating in the survey have established explicit strategies for advancing digital higher education. Similarly, according to the HRK Activity Report (2022), the German Rectors’ Conference advocates for the sustainable continuation of digitalization in teaching and learning, emphasizing the importance of building on the experiences gained during the pandemic and pursuing the digital transformation in a strategic and quality-oriented manner. Similarly, the EDUCAUSE Horizon Report (2023) highlights hybrid learning as a long-term trend shaping the future of higher education. These developments underline that the demand for digital tools enabling active and socially integrated remote participation will remain high. In this context, telepresence robots represent a particularly promising solution, as they go beyond conventional video conferencing by providing mobility, social presence, and interactive engagement in classroom settings.
Telepresence robots are segway-like video conferencing devices that can be remotely controlled by users, allowing them to engage in classes and university activities. They are typically equipped with a tablet monitor, several zoom lenses, microphones, an amplified loudspeaker, various self-driving sensors, a motorized height adjustment, and self-stabilizing functions (see Figure 1). Additionally, they use augmented reality to optimize the user experience. They can be controlled directly from various end devices via the Internet or find their way to a destination marked with a mouse click in the room in which they are moving, thus enabling interaction via video conferencing between the person controlling the robot and people who are in the vicinity of the robot.
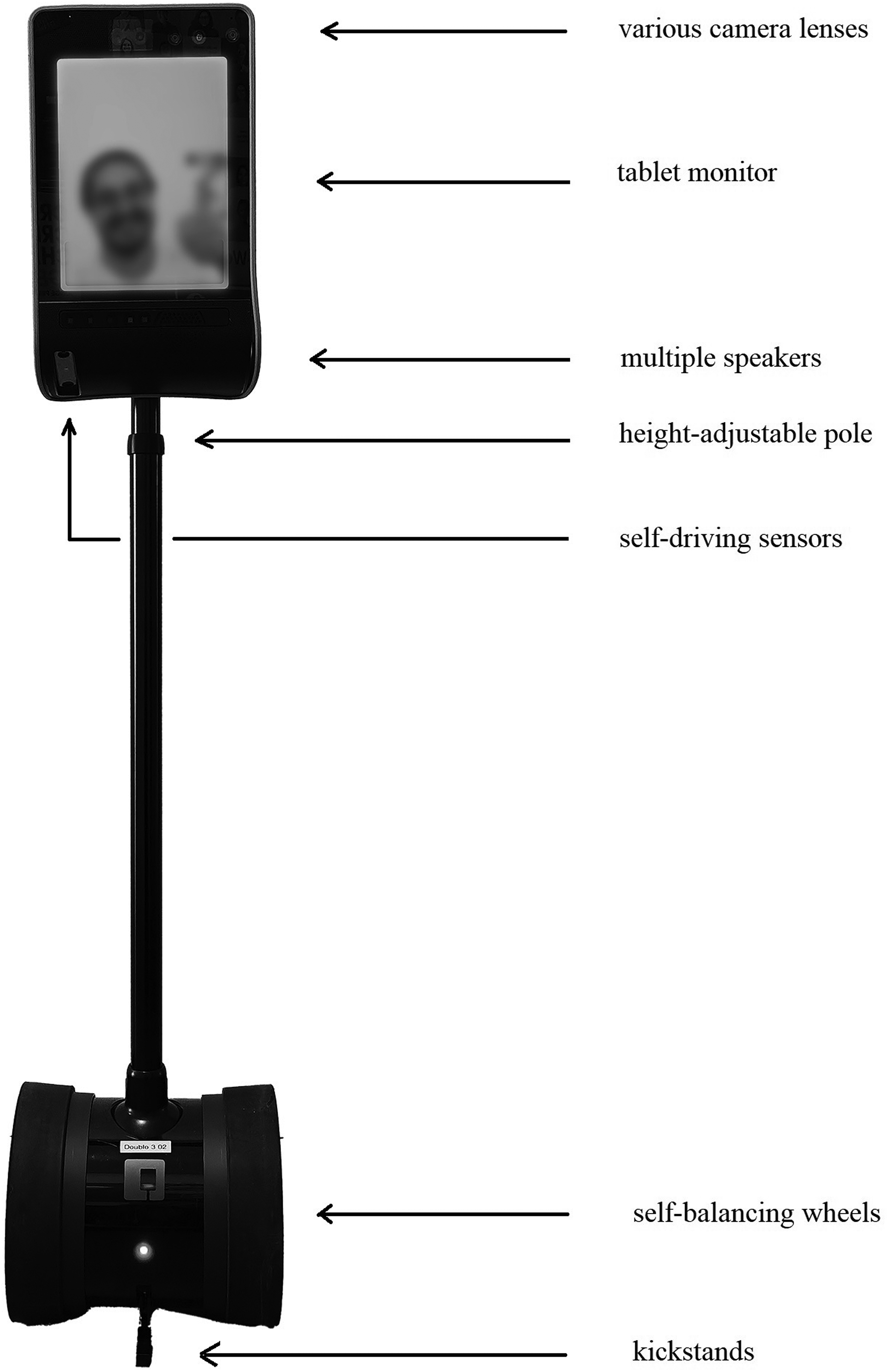
“Double 3” telepresence robot.
Initial studies on telepresence robots suggest that they are widely accepted in higher education (e.g., Lei et al., 2022; Wolff & Möller, 2021). According to Davis’ (1989) technology acceptance model (TAM), the acceptance of a technology is determined by its usefulness and ease of use. In their study, Lei et al. (2022) examined telepresence robots based on the TAM and showed that telepresence robots were rated as very easy to use and that their ease of use and acceptance were highly correlated. In addition, some findings from case studies indicate that they may foster users’ perceptions of autonomy, competence, and relatedness (Ahumada-Newhart & Olson, 2019; Newhart et al., 2016). These three psychological constructs are defined as basic psychological needs within self-determination theory (SDT; Deci & Ryan, 2000; Ryan & Deci, 2000a, 2000b), which describes that intrinsic motivation depends on the satisfaction of the basic psychological needs. To date, there has been a lack of studies that have systematically and experimentally investigated the satisfaction of the basic psychological needs and intrinsic motivation during the use of telepresence robots using inferential statistical methods.
The present study aimed to address this gap by testing the causal effects of telepresence robot use on the satisfaction of basic psychological needs and students’ intrinsic motivation. To this end, we compared students’ experiences participating via telepresence robot, smart 360° camera, and face-to-face teaching concerning the satisfaction of the three basic psychological needs and their perceived intrinsic motivation. The smart camera (equipped with various microphones and loudspeakers) enables 360-degree video recordings and focuses automatically on the current speaker in the room. Laboratory studies indicate that active-speaker detection and automated virtual cinematography improve subjective video quality and remote user experience (Cutler et al., 2020). Similarly, industry evaluations and case studies suggest that commercially available systems such as the Meeting Owl, which combine automatic speaker-tracking with a 360° perspective, are perceived as easy to set up and supportive of hybrid interaction. However, independent field studies assessing perceived usefulness and ease of use based on established frameworks such as the TAM remain scarce, and existing industry reports (Wainhouse Research, 2022) lack independent validation.
The main difference between telepresence robots and smart cameras is the ability to move around the room with the robot, which is impossible when using the smart camera. When using the smart camera, the user is bound to one location, and the viewing angle is controlled by the camera's artificial intelligence (AI) and not by the user. In addition, the user's video feed is displayed on the robot during use, which is not the case when using the smart camera. As a result, users do not have a visible presence in the room when participating via camera.
Addressing the psychological impact of telepresence robots is significant for both educational practice and theory. From a practical perspective, higher education increasingly relies on hybrid and flexible participation formats, and empirical evidence on how different technologies affect students’ motivation and engagement can guide instructors and institutions in making informed pedagogical and technological choices. From a theoretical perspective, examining the influence of telepresence robots on the needs for autonomy, competence, and relatedness extends the application of SDT (Deci & Ryan, 2000) into novel technology-mediated learning environments. While SDT has been widely validated in traditional (e.g., Conesa et al., 2022; Wang et al., 2019, 2024) and online settings (e.g., Chiu, 2021; Salikhova et al., 2020), little is known about its implications in hybrid contexts involving embodied technologies such as telepresence robots. Thus, our study not only informs practice by identifying conditions that foster or hinder motivation, but also advances SDT by testing its assumptions in an emerging and underexplored domain.
Theoretical Background
Self-Determination Theory
The present study is grounded in the SDT (Deci & Ryan, 2000; Ryan & Deci, 2000a, 2000b). Students, like all people, sometimes perceive themselves as active and inspired, for example, by taking part in courses, or they perceive themselves as passive, for example, by dreaming about the weekend and passing the time in class. Ryan and Deci (2000a, 2000b) took up this phenomenon in their SDT. They distinguished between different types of motivation and described the contexts in which the type of motivation is displayed. A fundamental distinction is made between intrinsic and extrinsic motivation. Extrinsic motivation is understood as the willingness to behave due to factors that are external to oneself. Intrinsic motivation, on the other hand, refers to behavior in which the activity itself is perceived as interesting or enjoyable (Ryan & Deci, 2000a, 2000b). It is understood as the individual's inner drive to develop new interests, deal with the unfamiliar, face challenges, explore, expand their knowledge, and further develop their skills (Ryan & Deci, 2000a, 2000b). SDT derives the type of prevailing motivation from the internalization and integration of the values and behavioral regulation associated with the activity or goal towards which the motivation is directed. Internalization refers to the adoption of new values and regulations, and integration describes the process of making them one's own so that one experiences them as belonging to oneself. Based on this, internalization and integration can be understood as a continuum that describes the motivation for a certain behavior from amotivation, through various forms of controlled extrinsic motivation, to autonomous intrinsic motivation. The higher the degree of internalization and integration, and to be understood in its fullest development as intrinsic motivation, the greater the associated perseverance, positive self-perception, and quality of commitment to the respective behavior (Ryan & Deci, 2000a, 2000b).
According to SDT, the development of intrinsic motivation is deeply dependent on the satisfaction of three basic psychological needs: autonomy, competence, and relatedness. The need for autonomy is understood as experiencing oneself as the author of one's actions and making self-determined decisions, the need for competence is understood as feeling effective and successfully overcoming challenges, and the need for relatedness is understood as feeling connected to others and experiencing meaningful social relationships (Ryan & Deci, 2000a, 2000b). These social-contextual conditions facilitate the development of intrinsic motivation. Concerning the educational context, a student's intrinsic motivation for a certain behavior in terms of SDT largely depends on the extent to which the basic psychological needs for autonomy, competence, and relatedness are satisfied. Empirical studies have provided substantial support for the influence of the three needs on intrinsic motivation in educational contexts.
For instance, Wang et al. (2019) investigated the relationship between the satisfaction of basic psychological needs and intrinsic and extrinsic motivation in 1,549 students in Singapore. Using structural equation modeling, they found positive relationships between the satisfaction of the basic psychological needs and intrinsic motivation according to SDT on the one hand. On the other hand, they found negative relationships between the satisfaction of the basic psychological needs and extrinsic motivation. These results are mirrored by the results of two meta-analyses (e.g., Conesa et al., 2022; Wang et al., 2024).
In one of these meta-analyses, Wang et al. (2024) examined the impact of educational interventions to promote intrinsic motivation in students based on SDT. They considered data from 36 studies and 11,792 participants and found significant effects for autonomy- and competence-related interventions on intrinsic motivation.
In the other meta-analysis, Conesa et al. (2022) investigated the relationship between the satisfaction of the basic psychological needs and motivation of primary and secondary school pupils. They analyzed data from 32 articles, of which 14 articles with 6,070 students examined the relationship between the satisfaction of basic psychological needs and intrinsic motivation. Conesa and colleagues found positive relationships between all three needs and intrinsic motivation.
With regard to digitization in education, SDT offers the opportunity to examine student motivation in this new context. This can be used to identify potential opportunities and challenges in order to offer teachers, developers, and policymakers design proposals that enable the framework conditions for optimal motivation in digital teaching and learning formats. To this end, Salikhova et al. (2020) compiled the results of studies on digitally supported learning from an SDT perspective over a period of 12 years in a meta-analysis. Based on their findings, they showed that digitally supported learning offers opportunities to satisfy the basic psychological need for autonomy in particular, but that it is challenging to satisfy the basic psychological need for relatedness. In his study, Chiu (2021) examined student engagement during COVID-19 from the perspective of SDT. Findings from this period appear particularly valuable, as the pandemic significantly accelerated and expanded the use of digitalization in the education sector, among others. He showed that the satisfaction of basic psychological needs during online learning predicted students’ subsequent engagement. In particular, he pointed out the relevance of support in satisfying the need for relatedness in the context of online learning. Chiu's (2021) findings regarding the satisfaction of the need for relatedness reflected the results of Salikhova et al.'s (2020) meta-analysis. Building on these findings, Dong (2025) illustrated how SDT can inform digital learning. According to the study, engagement in digital environments enhanced learners’ sense of competence, fostering intrinsic motivation, with digital self-efficacy acting as a key mediator. Complementing this, Puderbach et al. (2024) showed that students’ perceived technology competence increased during the early semesters of the COVID-19 pandemic, indicating that hands-on experience with digital tools can strengthen self-efficacy and support intrinsic motivation in digital learning contexts.
Use of Telepresence Robots in Education
Recent literature reviews show that the use of telepresence robots in hybrid learning environments can promote access to education, support communication and engagement, increase the user's social presence in the classroom, and foster inclusion and feelings of belonging (Kasuk & Virkus, 2024; Neumann et al., 2025; Virkus et al., 2023). In addition to challenges regarding their widespread implementation in the education sector, the authors point to the clear potential of using telepresence robots.
Telepresence robots appear to be a particularly motivating tool for participation in education. Especially in the context of interactive formats, it is plausible that the use of such technologies is more appealing to students, compared to common video conferencing systems (e.g., Zoom, Microsoft Teams), and promotes their engagement, presumably also because central psychosocial conditions for intrinsic motivation are better fulfilled. SDT provides a helpful framework for interpreting these differences.
We focused on intrinsic motivation as the main dependent variable because, according to SDT, it is directly fostered by the satisfaction of the needs for autonomy, competence, and relatedness (Deci & Ryan, 2000). In contrast to extrinsic forms of motivation, intrinsic motivation reflects students’ genuine interest and enjoyment in learning activities, which are central outcomes in higher education. This choice is also theoretically consistent with our comparison of participation technologies: Telepresence robots, by providing mobility and opportunities for spontaneous interaction, are expected to enhance students’ feelings of autonomy, competence, and relatedness more strongly than smart cameras. Consequently, if these technological affordances matter for motivational processes, their impact should most clearly be visible in students’ intrinsic motivation. From a practical perspective, focusing on intrinsic motivation is particularly relevant in hybrid learning contexts, as students’ voluntary engagement and sustained participation are crucial to prevent disengagement and passive attendance.
By using the telepresence robot, students have the opportunity to move around the room, change their perspective, and specifically address people or join discussion groups during group work. In contrast, when using a smart camera, students have no influence or control over the choice of their counterpart, which is reflected in a reduced ability to act and, therefore, a reduced sense of control and autonomy. For example, when using a telepresence robot, it is possible to ask a fellow student a comprehension question by turning to the fellow student independently, which only reaches the fellow student. Conversely, when using a smart camera, students would be directly at the center of attention, because the smart camera always zooms in on the current speaker. Given this, it seems likely that students feel more autonomous when using a telepresence robot than when using a smart camera, as they have control over their presence while using the robot.
During the use of the telepresence robot, students have their presence on site, because the video of their face is displayed on the screen, and thus can experience themselves as effective and subsequently competent during the course. In contrast, when using the smart camera, students do not have a permanent presence in the room, as they are faceless compared to using the telepresence robot. In addition, students cannot have individual conversations while using the smart camera and experience themselves as less competent, as they possibly disrupt the current seminar events, with their speech contribution, as they are poorly perceived without their presence in the room. Alternatively, they can only hope to be asked to speak, which can be random and therefore more likely to happen in situations in which they are unprepared, so that they give a less competent answer. In addition, by controlling the robot, non-verbal communication is possible to some extent, allowing students to experience themselves as more effective in their communication. Based on that, it is possible that students feel more competent when using a telepresence robot than when using a smart camera, as they can actively shape interactions while using the robot.
Moving the robot around the room, towards people, or by modulating the height of the tablet (on which the video recording of the students’ face is displayed), to have a conversation at eye level, can promote non-verbal communication, thus social exchange, and ultimately the feeling of relatedness. When using a smart camera, students’ own social interaction options are limited, as they are directly in the center of attention through interaction (only the video recording their face is presented) or passively witness the action (the student's face may only be visible to others to a limited extent or not at all). Given this, it is plausible that students experience a higher level of relatedness when using a telepresence robot than when using a smart camera, as the robot gives the user a physical presence in the room, which can be interacted with individually and informally.
Digitalization has given rise to a multitude of technological opportunities for participating in education. Various studies highlight the relevance of telepresence robots, which offer users a broader range of options for action compared to other communication technologies (Kasuk & Virkus, 2024; Neumann et al., 2025; Virkus et al., 2023). In order to optimize the fit between hybrid learning environments and the needs of students in the future, it is relevant to examine the user experience in regard to telepresence robots and compare it with that of other media.
Initial case studies have referred to SDT in discussions on the role of telepresence robots in satisfying basic psychological needs. In a qualitative, exploratory case study, Newhart et al. (2016) investigated how the use of telepresence robots by children who are unable to attend school in the long term due to chronic illnesses affected them. Concerning the three basic psychological needs, they found that telepresence robots can support the fulfillment of the needs for autonomy, competence, and relatedness. In a case study, Ahumada-Newhart and Olson (2019) discussed that the satisfaction of the basic psychological needs could be supported by the use of telepresence robots.
A study by Wolff et al. (2023) provides an example of the successful use of telepresence robots in psychology seminars. In these seminars, in which students from Germany and Kenya took part simultaneously, the robots were not only used for intercultural small group discussions, but also to enable the students visiting the campus of their partner university. An evaluation of the seminars revealed that both the students from Germany and the students from Kenya showed significant increases in intercultural competence as a result of participating in the seminars. Based on the available literature, there is overall evidence that telepresence robots are particularly suitable for meeting basic psychological needs in an educational context.
The Present Study
In the present study, we examined differences in the satisfaction of the three basic psychological needs—autonomy, competence, and relatedness—and intrinsic motivation, depending on the type of participation in a psychology seminar, via telepresence robot, via smart camera, and face-to-face.
According to SDT, it is therefore to be expected that social contextual conditions that favor the emergence of intrinsic motivation are more likely to prevail during the use of a telepresence robot compared to the use of a smart camera. Accordingly, it would be plausible that students feel more intrinsically motivated when using a telepresence robot than when using a smart camera.
Ultimately, it seems probable that face-to-face participation offers the highest satisfaction of basic psychological needs in comparison to telepresence robots and smart cameras, as possible restrictions resulting from the use of technology are eliminated from the outset, and students can thus experience greater autonomy. In addition, students who are physically present in the course can interact and communicate more spontaneously, and thus perceive themselves as more competent. Furthermore, direct presence in courses also offers a higher level of connection with fellow students, as all students have an equivalent experience, students are perceived not only through verbal and mimic communication but also through body language and students who are physically present can experience the connection not only visually but also on other sensory levels (e.g., the hug as a greeting).
In light of our theoretical considerations above, we assumed that the satisfaction of all three basic psychological needs, as well as intrinsic motivation, would differ between the three ways of participating in the seminars examined in our research. Specifically, we made the following assumptions.
− Hypothesis 1: Students will experience themselves as more autonomous in the robot condition than in the smart camera condition (H1a). Moreover, they will experience themselves as more autonomous in the face-to-face condition than in the two technology conditions (H1b). − Hypothesis 2: Students will experience themselves as more competent in the robot condition than in the smart camera condition (H2a). Moreover, they will experience themselves as more competent in the face-to-face condition than in the two technology conditions (H2b). − Hypothesis 3: Students will experience themselves as more related in the robot condition than in the smart camera condition (H3a). Moreover, they will experience themselves as more related in the face-to-face condition than in the two technology conditions (H3b). − Hypothesis 4: Students will experience themselves as more intrinsically motivated in the robot condition than in the smart camera condition (H4a). Moreover, they will experience themselves as more intrinsically motivated in the face-to-face condition than in the two technology conditions (H4b).
To investigate these hypotheses, we conducted an experimental study with psychology students. They participated in psychology seminars with telepresence robots, smart cameras, and face-to-face, and then evaluated their perceived autonomy, competence, relatedness, and intrinsic motivation. In addition, this study is the first to use an experimental approach and inferential statistical methods in this context.
Method
Design, Sample, and Procedure
A total of N = 36 bachelor students (age: M = 22.47 years; SD = 2.48; 63.89% male) from a German university participated, with all participants completing all three experimental conditions. The study was conducted in three undergraduate seminars in the fields of social and environmental psychology. According to the semester schedule, the three seminars were all designed for the same semesters of the bachelor's program. The sessions were designed to be highly interactive, combining short lecture inputs with group discussions, collaborative exercises, and case-based learning activities. This format was chosen because it typically requires active participation and social interaction, thus providing a suitable context to examine differences in the satisfaction of needs for autonomy, competence, and relatedness across participation conditions. Since all students in the seminars participated in our study, we considered it likely to have a rather representative sample of local psychology students. A post-hoc power analysis showed that this sample would have allowed us to detect effects of f = 0.25 with a power of .84 at an alpha level of .05 for variance analysis with repeated measures. This power analysis indicated that our study had sufficient power.
We conducted an experiment with a 1 × 3-factorial within-subjects design, which was spread over seven seminar sessions. Each participant attended one session of the seminar via telepresence robot, one session via camera, and all other sessions in person. The assignment of students to participation conditions at the respective measurement points was randomly selected in advance, whereby a maximum of three participants could take part with the robot and three participants with the camera at the same time. After each session, all participants completed an online questionnaire to assess their satisfaction of the three basic psychological needs and intrinsic motivation in the last session. This made it possible to collect data for all students in every condition, whereby the students completed questionnaires multiple (usually four) times in the face-to-face condition and only once in the technology conditions. For data analysis, the first measurement in each condition was considered for each participant.
The telepresence robots used in this study were of the Double 3 (Double Robotics, n.d.) model, while the smart cameras were of the Meeting Owl 3 (Owl Labs, n.d.) model. Before the survey took place, the telepresence robots and smart cameras were presented to the students, they received a brief training session on the functionality of the hardware, and they had the opportunity to ask any questions and test the various telepresence technologies. The telepresence robots can be used intuitively, similar to a computer game. Since the robots are very easy to use (Lei et al., 2022) and require very little preparation, additional training did not seem necessary. Data were collected via an online survey using the LimeSurvey platform (LimeSurvey GmbH, n.d.). Ethical approval was obtained in advance from the university's ethics committee. Participation was voluntary, and students were informed about the study's purpose and procedures in advance.
Measures
Basic Psychological Needs and Intrinsic Motivation
To measure the satisfaction of the three basic psychological needs, we adapted the Work-related Basic Need Satisfaction Scale from Van den Broeck et al. (2010) to our research context. This scale consists of five items to measure autonomy (e.g., “I felt free to learn in the seminar as I saw fit.”), five items to measure competence (e.g., “I felt capable in the class.”) and three items to measure relatedness (e.g., “I felt part of a group in the class.”).
To measure intrinsic motivation, we adapted the German Scales for the Assessment of School-Related Values (Steinmayr & Spinath, 2010). Although this scale was originally developed in the framework of expectancy-value theory (Eccles et al., 1983), previous research has demonstrated its suitability for assessing intrinsic motivation in the sense of SDT (Reindl, 2021; Spinath & Steinmayr, 2012). Gråstén (2016) further argued that the construct of “intrinsic value” in expectancy-value theory and “intrinsic motivation” in SDT largely overlap conceptually. We therefore considered this scale to be theoretically consistent with our study. In addition, the use of a short, validated measure was important for pragmatic reasons, as our repeated-measures design was implemented during ongoing seminars and we sought to minimize participant burden.
The scale consists of three items (e.g., “I enjoyed the class I attended.”). Participants rated all items at each measurement time point on a 7-point Likert scale, ranging from 1 = does not apply at all to 7 = fully applies. Several items measuring autonomy and competence were formulated negatively. The negatively formulated items were reverse-coded. The reliability of the applied scales was good to excellent, with Cronbach's alpha ranging from .87 to .94. All items can be found in English and German in the Supplemental material.
Data Analyses
We conducted our analyses in R 4.2.0 (R Core Team, 2021). First, a series of preliminary analyses was carried out to test the statistical requirements for the multivariate analysis of variance (MANOVA) and post-hoc analyses. These requirements were largely fulfilled. However, the normality assumption was not met for some of the dependent variables (for more information, see the Supplemental material). Nevertheless, since (M)ANOVAs are relatively robust against violations of the normal distribution (Blanca et al., 2017; Finch, 2005), we conducted our analyses using these statistical tests. For the follow-up univariate ANOVAs, Greenhouse–Geisser corrections were applied, when the assumption of sphericity was violated (Girden, 1992).
We performed a MANOVA and post-hoc four ANOVAS, to examine differences in satisfaction of the three basic psychological needs—Autonomy, Competence, Relatedness—and intrinsic motivation as a function of the kind of participation—Telepresence Robot, Smart Camera, face-to-face—in the seminars. We used the MANOVA Pillai's trace to interpret our results, as this is considered to be particularly robust among the various possible test statistics (Olson, 1974). To control the family-wise error rate and identify significant differences between group means, post hoc pairwise comparisons were conducted using Tukey's HSD test with a significance level of α = .05.
Results
Preliminary Results
As displayed in Table 1, all variables showed significant correlations in all conditions and across the conditions. One exception was the weak (r = .28), non-significant correlation between the satisfaction of the needs for autonomy and relatedness in the face-to-face condition.
Means, Standard Deviations, and Correlations with Confidence Intervals.
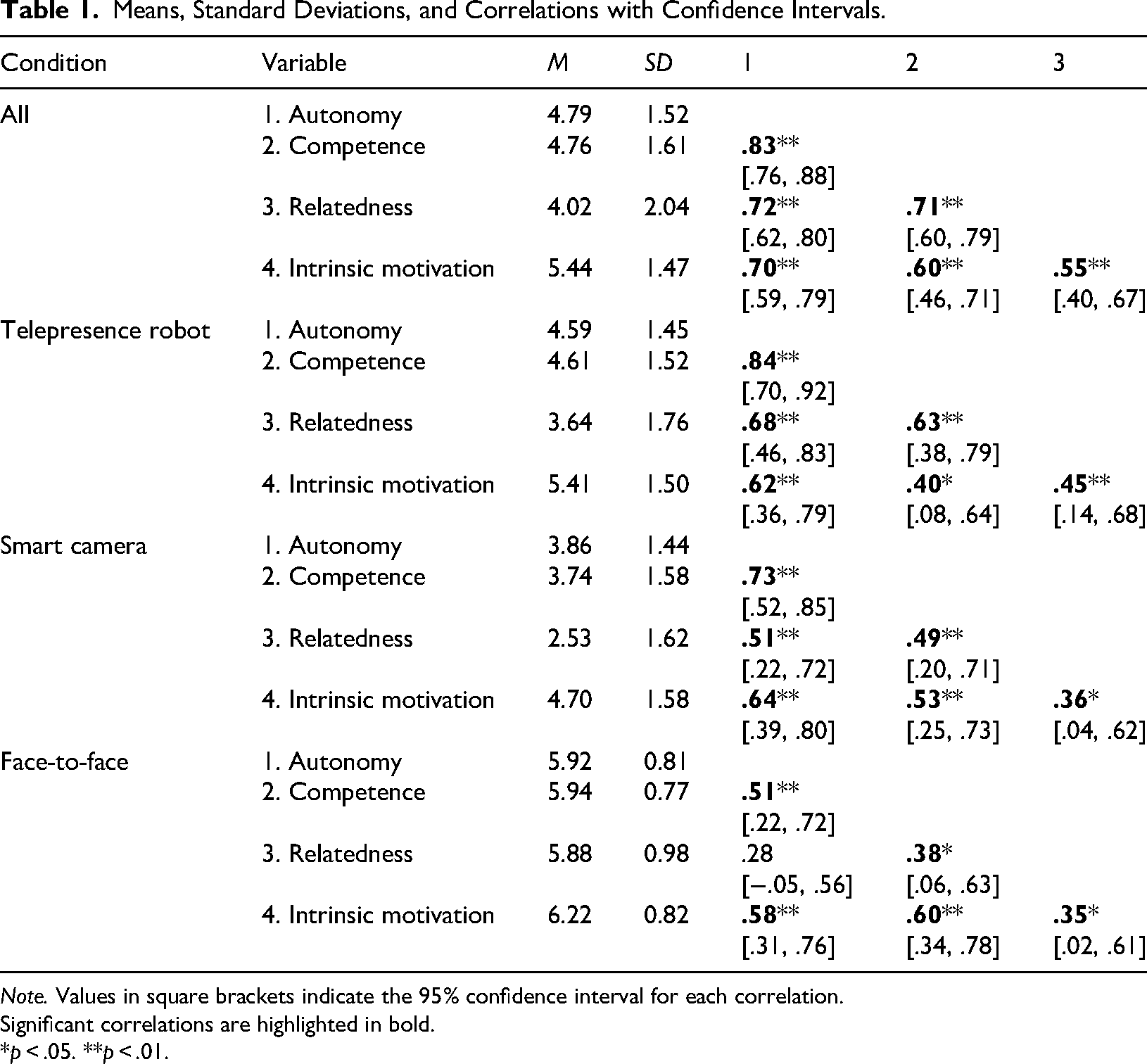
Note. Values in square brackets indicate the 95% confidence interval for each correlation.
Significant correlations are highlighted in bold.
*p < .05. **p < .01.
Main Results
The MANOVA showed a significant result with V = .68, F(6, 138) = 11.93, p < .001, which indicates a different level of satisfaction of the basic psychological needs and intrinsic motivation in the different conditions. Follow-up univariate ANOVAs with Greenhouse–Geisser correction revealed significant effects of participation condition on the satisfaction of the need for autonomy, F(1.91, 67.02) = 34.89, p < .001, η2p = .50, the need for competence, F(1.98, 69.36) = 36.53, p < .001, η2p = .51, the need for relatedness, F(1.83, 63.95) = 66.53, p < .001, η2p = .66, and intrinsic motivation, F(1.84, 64.28) = 16.17, p < .001, η2p = .32.
Subsequent pairwise comparisons showed mainly significant results (p < .001, .36 < d < 1.69) between all conditions for the satisfaction of all basic psychological needs and intrinsic motivation. Only the pairwise comparison between the telepresence robot condition and the smart camera condition for intrinsic motivation was nonsignificant (p = .066). Specifically, as depicted in Table 2, the post hoc tests revealed that the students rated the satisfaction of all basic psychological needs higher in the case of participation via telepresence robots than in the case of participation via smart cameras, but lower than in the case of face-to-face participation (all ps < .01, see also Figure 2). A plot showing the individual distribution and data points can be found in Figure 3 in the Supplemental material.
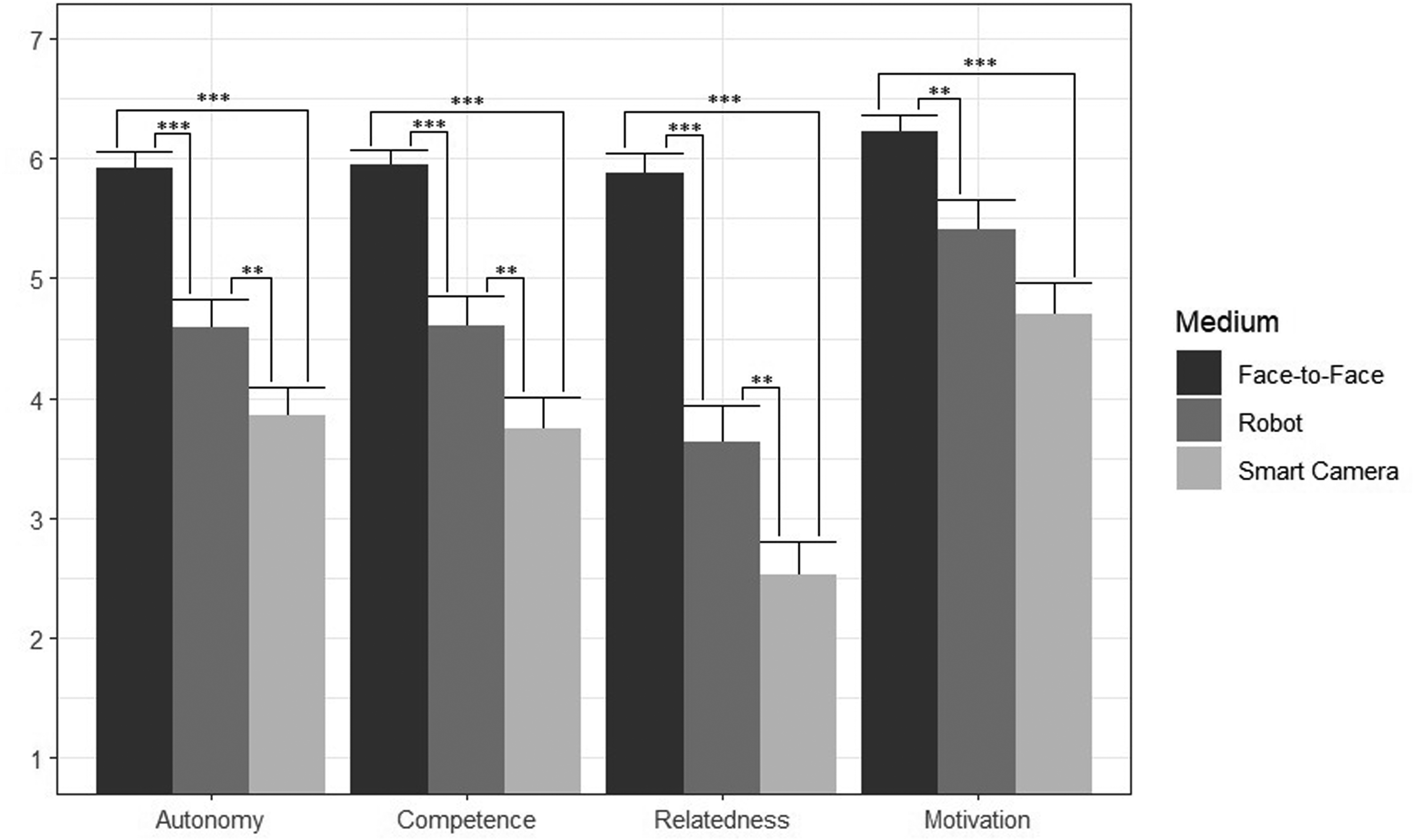
Mean levels of basic psychological need satisfaction and intrinsic motivation across participation conditions.
Pairwise Comparisons of the Three Participation Conditions for the Satisfaction of Each Basic Psychological Need and Intrinsic Motivation.
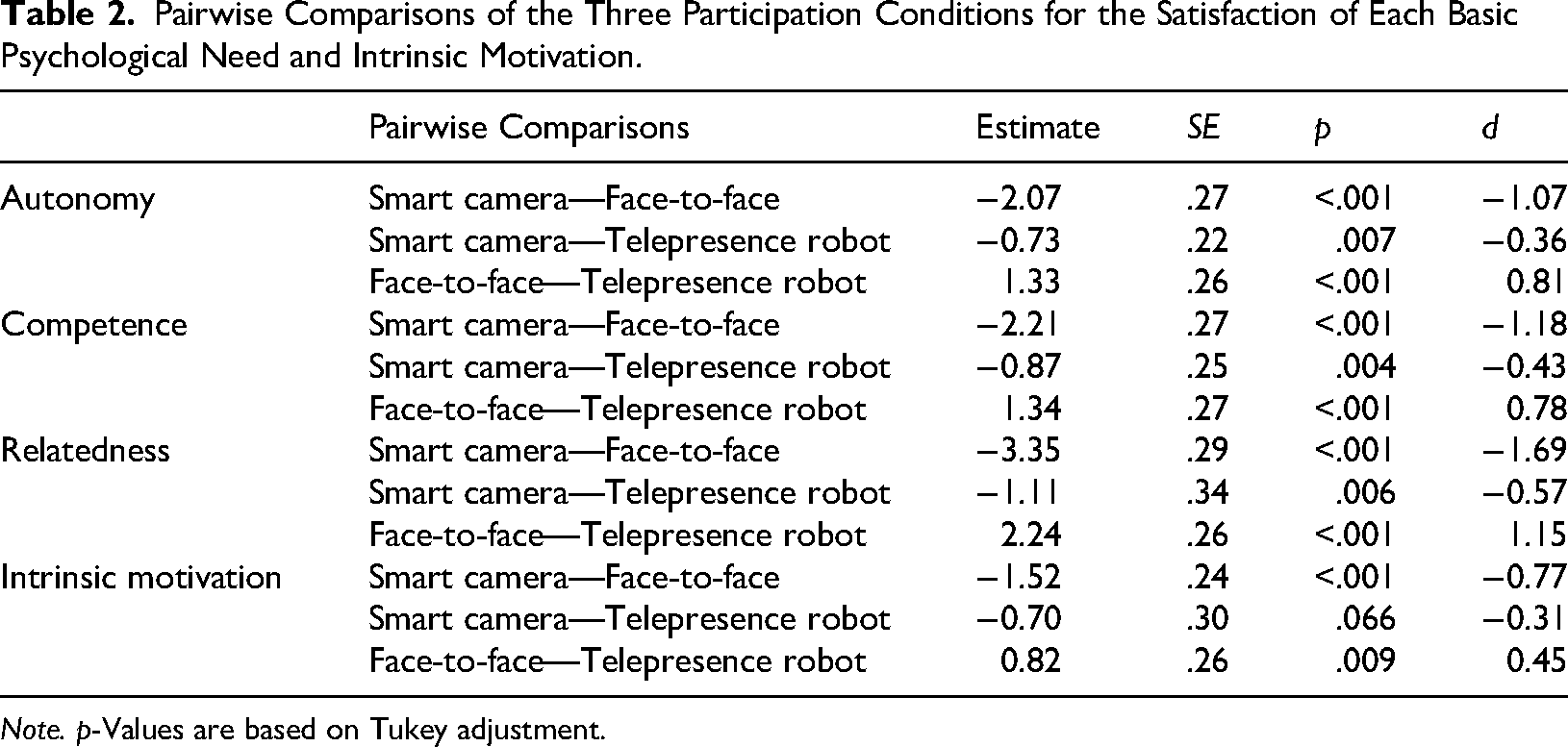
Note. p-Values are based on Tukey adjustment.
Discussion
Building on Newhart et al.’s (2016) and Ahumada-Newhart and Olson's (2019) studies on the use of telepresence robots in the educational context, we extended the existing literature with a first quantitative study with an experimental design that uses SDT as a framework for evaluating the user experience of telepresence robots. The study aimed to investigate the extent to which the satisfaction of three basic psychological needs, as well as intrinsic motivation, differed in a seminar as a function of participating via telepresence robot, smart camera, and face-to-face.
Our findings were largely consistent with our hypotheses, that the satisfaction of the basic psychological needs in face-to-face education was the highest in comparison, and that there was a stronger satisfaction of the basic psychological needs in terms of SDT when using a telepresence robot compared to using a smart camera. Accordingly, our results showed that face-to-face participation remains the most need-supportive condition, which echoes the broader SDT literature and demonstrates that digital mediation often constrains the satisfaction of the need for relatedness (Durksen et al., 2016). Our results deviated from our hypotheses only with regard to the comparison of the two technology conditions in terms of intrinsic motivation.
Overall, our findings indicate a clear hierarchy across the three participation conditions. As expected, face-to-face participation yielded the highest levels of satisfaction of the needs for autonomy, competence, relatedness, and intrinsic motivation. This aligns with SDT's assumption that immediate social presence and unmediated interaction provide optimal support for psychological needs. This aligns with prior empirical evidence demonstrating strong links between need satisfaction and intrinsic motivation in classroom contexts (Conesa et al., 2022; Wang et al., 2019, 2024). At the same time, when comparing the two technological solutions, participation via telepresence robot consistently resulted in higher need satisfaction than participation via smart camera. This result corresponds with earlier SDT-based research on digital learning (Chiu, 2021; Dong, 2025; Salikhova et al., 2020), which highlighted that the satisfaction of the needs for autonomy and competence can be effectively supported through interactive and controllable digital technologies, whereas relatedness often remains more difficult to satisfy. This suggests that although technological mediation cannot fully substitute for in-person presence, telepresence robots represent a more effective alternative than conventional camera-based solutions—an insight of particular relevance for the design of hybrid teaching environments.
These observed differences suggest that the choice of technology with which students participate in a seminar can have a significant influence on the satisfaction of their basic psychological needs. It may be that students’ needs for autonomy, competence, and relatedness were satisfied more during the use of a telepresence robot in comparison with a smart camera as a consequence of different technical features. The telepresence robot may have served as a surrogate for student's presence in the seminar, while the smart camera only showed a picture of the student when speaking. The telepresence robot offers more active and self-determined opportunities for interaction with the course, while the smart camera enabled only receptive participation. The ability to move around the room autonomously and participate in social interactions in a targeted manner might have promoted both the experience of control over one's own learning behavior and integration into the seminar group. In contrast, when using the smart camera, the student's face was controlled by the camera itself and not directly by the student, as the student's face was only shown when they spoke. Using the telepresence robot allowed students to interact with individual other students, have informal conversations, and choose the type of conversation they wanted to engage in. During the use of the smart camera, students are in the spotlight as soon as they engage in a conversation. Informal side conversations are almost impossible using this kind of technology. Our findings can be directly related to the assumptions of SDT (Deci & Ryan, 2000). As expected, the telepresence robot condition supported the satisfaction of the needs of autonomy and competence more strongly than the smart camera, in line with the theoretical claim that opportunities for self-directed action and perceived effectiveness are crucial for intrinsic motivation (Howard et al., 2021; Wang et al., 2024). In particular, the ability to move within the classroom and to initiate interactions appears to have enhanced students’ sense of agency, which is consistent with Newhart et al.'s (2016) qualitative findings on the support of perceived autonomy in school children using telepresence robots. Similarly, the higher ratings of the satisfaction of the need for relatedness in the robot condition resonate with Ahumada-Newhart and Olson's (2019) argument that embodied presence fosters social inclusion. These findings thus extend existing studies on acceptance of telepresence robots (Lei et al., 2022; Wolff & Möller, 2021) by showing that robots do not only “work” at the level of usability or acceptance, but also at the level of core motivational processes central to SDT. In this sense, our study provides the first quantitative evidence that telepresence robots can serve as a partial substitute for physical presence in satisfying psychological needs, though they cannot fully replicate the motivational advantages of in-person interaction.
Although the mean intrinsic motivation value was higher in the telepresence robot condition than in the camera condition, we found no significant difference in this construct between the two technology conditions. One possible explanation for the fact that intrinsic motivation did not differ significantly in the two technology conditions could be that both technologies were new to the students, which increased the level of intrinsic motivation in both technologies (Fryer et al., 2017). We could maybe have found a significant difference in intrinsic motivation if the students had interacted with the media more frequently, so that they would have been familiar with it and accustomed to it, thereby preventing any distortion of the data due to a novelty effect. Moreover, it should be considered that intrinsic motivation is the more distal construct compared to the three basic psychological needs. Therefore, it may be more strongly influenced by other factors, especially those taking place during the seminar (e.g., contents of the sessions), than the satisfaction of the basic psychological needs. However, we also would like to note that the pairwise comparison of intrinsic motivation between the telepresence robot and smart camera conditions revealed an effect of d = 0.31, which only narrowly missed the significance level (p = .066). Thus, in a one-sided significance test, we would have found a significant difference.
Strengths and Limitations
A particular strength of the present study lies in the experimental research design, which enabled a systematic variation of the participation conditions and thus a causal interpretation of the findings. The controlled assignment of participants to the conditions made it possible to minimize distortions due to self-selection and to precisely record differential effects on the satisfaction of basic psychological needs and intrinsic motivation. This methodological approach allowed for causal statements to be made about the effects of different forms of participation, with and without technical support, on central motivational aspects of learning. The study thus makes an empirically sound contribution to the evidence-based discussion about telepresence solutions in university teaching.
The study also has several limitations. First, we did not conduct any tests to examine the individual amount of interaction that each student engaged in during each measurement time point. However, the study primarily focused on participants’ subjective experience regarding the satisfaction of their basic psychological needs and intrinsic motivation. This focus is consistent with SDT, which conceptualizes autonomy, competence, and relatedness as psychological needs that are fulfilled through individuals’ subjective perceptions rather than objective behavioral indicators. Especially in the first experimental study on telepresence robots in higher education relating to the psychological needs described in SDT, it was therefore crucial to capture these subjective experiences directly, before complementing them in future research with additional behavioral or interactional data.
Second, we did not consider potential individual differences that may have influenced how students experienced the various participation formats. One important factor is technology acceptance (Davis, 1989), which reflects the extent to which a person perceives a technology as useful and easy to use. Another is technology commitment (Neyer et al., 2012), which predicts technology use alongside technology acceptance through personal competence and control beliefs. Prior studies have shown that both constructs can shape users’ experience and appraisal of digital tools (Davis, 1989; Neyer et al., 2012; Puderbach et al., 2024), and they may therefore act as moderators of the extent to which telepresence robots satisfy students’ basic psychological needs. The main interest of the study was the influence of telepresence robots on the satisfaction of the basic psychological needs and intrinsic motivation. However, further studies have the opportunity to investigate the influence of individual differences regarding the satisfaction of basic psychological needs according to SDT and intrinsic motivation during the use of telepresence robots.
Third, the time the students spent with the devices was relatively short. It could be that the intrinsic motivation was so high because the devices were still new to the students (Fryer et al., 2017). However, it could also be that they had problems operating the devices properly, resulting in limitations that affected intrinsic motivation and need satisfaction. Accordingly, future research should investigate how telepresence robots (as well as smart cameras) affect need satisfaction and intrinsic motivation in university teaching in the long term.
Fourth, the generalizability of our results to other student groups may be limited due to the sample examined. Since psychology students constitute a rather homogeneous group compared to students from other fields of study (Henrich et al., 2010), conclusions about other target groups, such as students outside the field of psychology or the general public, can only be drawn to a limited extent. Moreover, our sample was relatively small and did not allow us to examine whether the results differed, for example, between subgroups of our sample. Nevertheless, considering the aim of the present study to examine telepresence robots in teaching and learning in psychology, the fact that our sample consisted of psychology students can be seen as an advantage of our study. In addition, our power analysis indicated that our sample was large enough to detect significant differences between the experimental conditions compared in our research.
Since all students took part in the experiment in all conditions, no bias in the results was to be expected due to missing data. Accordingly, our study allowed us to draw reliable conclusions about the impact of different ways of participating in psychology seminars on the satisfaction of basic psychological needs and intrinsic motivation. Potential biases, such as self-selection bias in the data, are also rather unlikely, as two of the seminars were part of a compulsory module that students had to attend as part of their bachelor's degree. Furthermore, when choosing the seminars, the students were not aware that the study would be conducted during the course, so that knowledge of the study or interest in new technologies and a possible desire to try them out could not have influenced students’ choice of the seminars.
Implications
This study provides insights into how telepresence robots influence the satisfaction of autonomy, competence, and relatedness in psychology education. Our findings indicate that telepresence technologies differ not only functionally but also in their impact on students’ psychological experiences. Although face-to-face participation remains optimal, telepresence robots offer a viable alternative for students who cannot attend in person, supporting more active engagement than conventional camera systems. Given the interactive nature of psychology seminars, these technologies may be particularly beneficial in this context, with potential—though likely varying—relevance for other disciplines.
Our results suggest that telepresence technologies can meaningfully support the satisfaction of the basic psychological needs in hybrid settings. A differentiated use of technologies—mobile robots for interactive seminars, stationary systems for lectures—may help tailor participation modes to teaching formats. Technical optimization and optimization of the infrastructure, instructor training, and inclusive classroom practices can further enhance students’ experiences. Regular student feedback may guide iterative improvements.
At the policy level, telepresence technologies may help promote inclusion by enabling participation for students unable to attend in person. Investments should prioritize tools that foster active engagement and social presence. Providing faculty training and diversifying hybrid participation formats across disciplines can support psychologically conducive learning environments.
Conclusion
This study extends existing literature on SDT and the design of digital learning environments by investigating how classroom participation modes affect students’ basic psychological needs satisfaction and intrinsic motivation. The results indicate that the way students participate in their courses influences how the basic psychological needs according to SDT are met. Concerning the methods examined for hybrid participation in courses, telepresence robots proved to be superior to cameras in terms of satisfying needs. Nevertheless, the robots could not replace in-person participation regarding the variables examined. In practice, the results of our study can support lecturers in designing teaching that is as motivating as possible.
Supplemental Material
sj-docx-1-plj-10.1177_14757257251407697 - Supplemental material
Supplemental material, sj-docx-1-plj-10.1177_14757257251407697
Footnotes
Acknowledgments
We thank Florian Rosing for his help with data collection. During the preparation of this work, the authors used ChatGPT to address some of the reviewers' comments and improve the paper's readability. However, after using this tool, the authors reviewed and edited the content as needed and took full responsibility for the content of the published article.
Ethical Approval
All study participants gave their consent to the processing of their data after being informed about the content and purpose of the study. In accordance with the guidelines of the German Psychological Society (DGPs), ethical approval was not required for this study, because participants were fully informed about the aims and procedures of the studies before taking part in the study and because they were not expected to take any risks by participating in the study.
Author Contributions
Conceptualization: Leonard Puderbach, Martin Laun, Fabian Wolff; Methodology: Leonard Puderbach, Martin Laun, Fabian Wolff; Formal analysis: Leonard Puderbach; Investigation: Leonard Puderbach; Writing—original draft: Leonard Puderbach; Writing—review and editing: Martin Laun, Fabian Wolff; Supervision: Fabian Wolff.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Our research was funded by Grant 16DHBKI039 from the German Federal Ministry of Education and Research (BMBF).
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Supplemental Material
Supplemental material for this article is available online.
Author Biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.