
Abstract
A challenge during vessel design is translating functional requirements into seakeeping evaluation metrics to ensure that delivered vessels are fit for purpose. This paper presents an approach based on task analysis methods for identifying and decomposing motion-critical tasks from given functional requirements, by which seakeeping evaluation metrics can be derived. The method is applied and guides the reader through deriving seakeeping criteria and standards for two case study vessels, focussing on crew performance. Findings suggest that the seakeeping evaluation metrics of different vessels will differ based on their purpose or mission. It is envisioned that the method will guide the seakeeping evaluation of vessels, which has been less prioritised in vessel design. This method can potentially ensure crew performance and safety in the early design stages.
Introduction
Consider these vessel types: a pipe-laying vessel, a patrol boat and a cruise ferry. Without any reasonable doubt, the design features of these three vessel types will differ because of their differing functions. These functions refer to the operations needed to achieve the vessel’s primary purpose. For instance, the functions of a pipe-laying vessel include loading and keeping pipes in good condition on deck, transporting the pipes safely to the laying site, and laying pipes with sufficient margins of accuracy. The outline of such functions, usually from a vessel procurer or prospective owner, is referred to as functional requirements, as used in this paper. These functional requirements determine, amongst others, how the vessel should be built, which machinery or equipment should be installed, and at what service speed it should operate. Depending on the procurer or prospective owner, the specification or formulation of these functional requirements may be detailed or generalised. Despite the level of detail, concerned stakeholders often require design engineers, particularly naval architects, to determine whether a vessel’s design meets its functional requirements.
The design of marine vessels spans different stages. These stages include but are not limited to the estimation of principal dimensions, hull geometry design, weight estimations, structural design, and stability assessments that lead to a final design.1–3 However, it is primarily at the seakeeping analysis and evaluation stage that it can be determined with a satisfactory margin of certainty whether a vessel, as designed, will perform as expected in a specified seaway of operation.4–8 This is because a vessel’s seakeeping informs how it responds with motions to the hostility of the marine environment throughout its service life. 9 Mostly, these motion responses are detrimental to occupants, cargo and the operation of the vessel.5,10–16 Therefore, a seakeeping analysis and evaluation are essential in ensuring that a vessel’s design is well-suited for the specified functional requirements and the needs of prospective occupants, whether crew or passengers.
While there are well-established methods for predicting a vessel’s motions in a seakeeping analysis,17,18 and sources of seakeeping evaluation criteria,19–23 a recurring challenge in vessel design is determining or selecting criteria that reflect the tasks and operations performed onboard. 24 This challenge hinges on translating given functional requirements into seakeeping evaluation metrics relevant to the vessel’s operations. Studies have proven that the negative influences of motions on crew vary depending on the nature of the tasks they perform, with some tasks being more influenced than others.10,12,25–29 Identifying and accounting for such tasks in a seakeeping evaluation is paramount for every vessel’s design from the crew performance and safety perspective and requires a structured approach. Then again, other studies have argued that the existing criteria and assessment methods relating to crew activities onboard (human factors) are not adequate to reflect the conditions the crew are exposed to in their work environment.9,30,31 These findings point to the fact that current practices lack a structured method for selecting evaluation criteria that reflect specific mission profiles and tasks, especially for specialised vessels.9,32
This paper presents a methodological framework to help bridge this gap. It introduces a Task Analysis-based approach33,34 for identifying motion-critical tasks (essential tasks negatively influenced by motions) from functional requirements. Task Analysis provides a detailed understanding of work environments, the tasks performed and the interactions within a system. 34 Task Analysis, for example, Hierarchical Task Analysis, Cognitive Task Analysis, has been successfully applied in the energy, military, aviation, and healthcare industries and has been proven to promote effective and user-centred system designs.35–41 In the maritime domain, task-centred approaches have been applied in specific contexts, though not all explicitly following established Task Analysis procedures. These applications include offshore workability studies for operation planning,42–45 the design and analysis of systems on vessels46,47 and the mission-driven design of naval vessels.22,26,48,49 However, this Task Analysis concept, though advocated for,25,50 has not been rigorously applied nor accepted as standard practice in the seakeeping design of merchant vessels, including workboats. Seakeeping evaluations of merchant vessels typically focus on vessel performance metrics, neglecting the human perspective and the specific tasks performed onboard, thus lacking a systems approach. This gap limits the relevance of seakeeping assessments for real-world operations. Therefore, inspired by its successful application in other complex systems, Task Analysis is proposed to incorporate crew members’ lived experiences and task demands into seakeeping evaluations, ultimately aiming to enhance safety and operational effectiveness. Demonstrated on two workboat case studies, this approach enables tailored seakeeping evaluations that align performance assessment with vessel functions, promoting efficient vessel designs for safe operations.
The paper is organised as follows.
A task-oriented approach to seakeeping evaluation
In an earlier publication, the authors proposed an approach to seakeeping evaluation that considers the tasks or operations expected to be performed onboard. This approach involves tailoring criteria to each vessel’s mission or purpose, 32 upon which the proposed framework presented in this paper is developed. This framework, illustrated by Figure 1, presents a task-oriented approach that guides the evaluation of whether the vessel’s functions can be carried out efficiently and effectively. Tasks, as used here, refer to specific activities required for the successful execution of an operation or mission. Since vessel motions are inevitable in marine environments, the framework serves as a guide to ensuring that a vessel’s seakeeping does not hinder the safe execution of tasks and operations. Here, “safe” is not limited to the absence of injuries, near misses or accidents. It also covers everyday work performance, ensuring that the vessel system (comprising the vessel, onboard equipment and the crew) can operate as intended without causing harm to personnel forming a part of the system.51–53 The chosen safety definition in this paper follows Safety-II, a system safety concept introduced by Hollnagel, 54 which focuses on the ability to succeed under varying conditions.
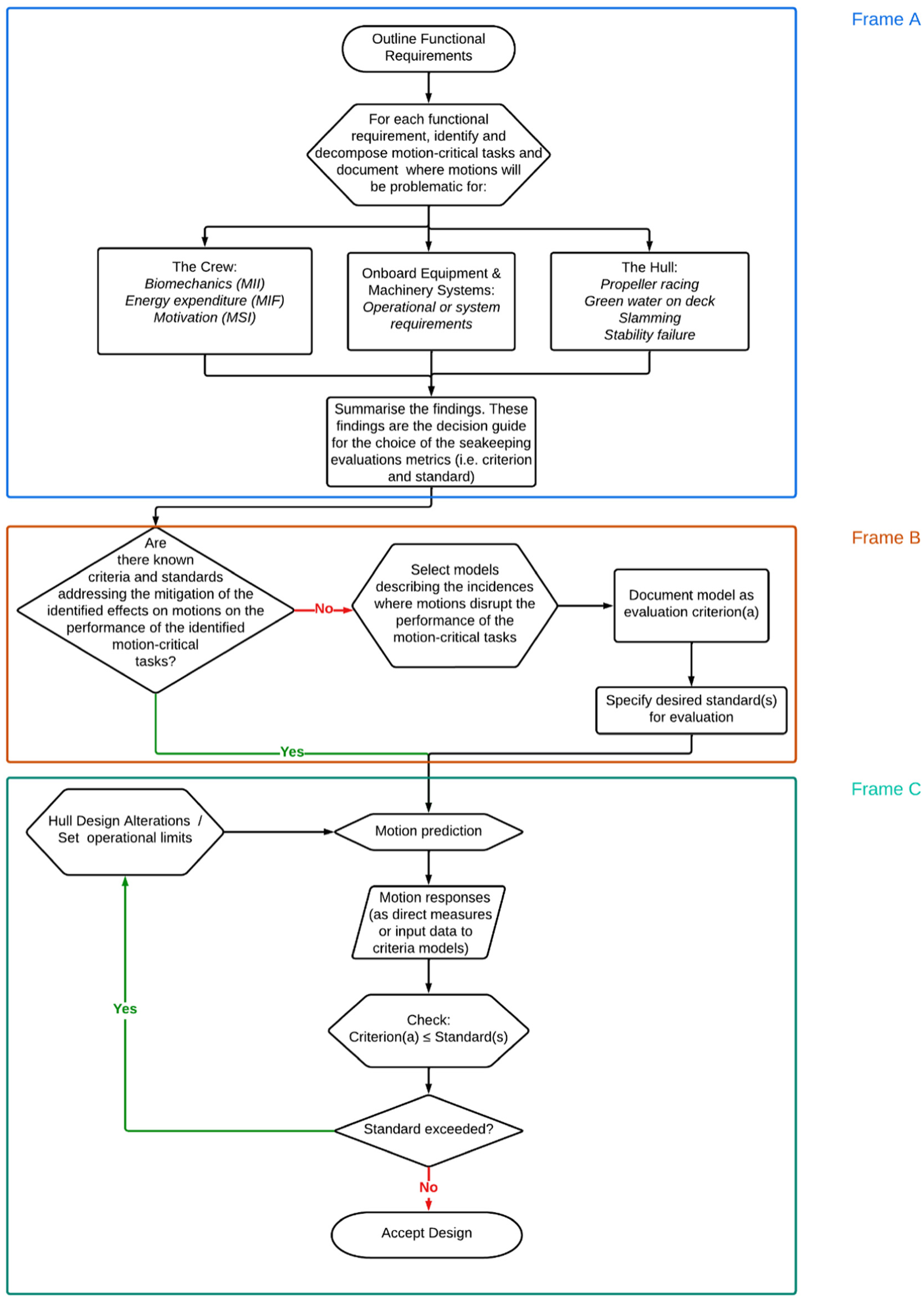
Proposed framework for seakeeping evaluation (adapted from Zu et al. 32 ).
Accordingly, the chosen definition encompasses aspects of operability and safety, ensuring that these aspects are not mutually exclusive in the seakeeping evaluation.
This maintains the goal of carrying out tasks safely, regardless of the nature of the marine work environment. Following this framework ensures that seakeeping evaluations focus on the ability of the vessel system to adapt to varying sea conditions, manage risks, and efficiently and effectively perform tasks to achieve mission success. The process illustrated in Figure 1 is structured into three thematic frames. The objective in Frame A is to break down the functional requirements to identify motion-critical tasks. These motion-critical tasks are then translated into evaluable criteria expressed as functions of motion in Frame B. Finally, in Frame C, systematic assessments are made considering what conditions and to what extent the vessel can fulfil the functional requirements.
This proposed framework builds on traditional operability analysis and is methodologically similar to standard offshore workability studies. However, while workability studies focus on determining operational time windows within defined reference periods,43–45,55 the method presented here is a seakeeping evaluation workflow for comparing or appraising vessel designs over the vessel’s service life, to determine fitness-for-purpose. Based on the identification of motion-critical tasks, this framework prioritises task-level analysis of how motions affect crew performance and safety across vessel functions, thereby providing a systems approach to seakeeping evaluation.
Frame A: Identifying motion-critical tasks from functional requirements
Recognising that vessel motions can adversely affect occupants and daily operations, the first logical step in the framework is to identify motion-critical tasks and decompose them. While there is no widely accepted definition of a motion-critical task, the UK Royal Navy defines critical tasks as those tasks whose failure to perform “puts the individual, their colleagues and ultimately the vessel and the whole ship’s complement at severe risk in an operational scenario” 56 (p. 504). However, as used here, tailored to the seakeeping evaluation context, a motion-critical task is one significantly influenced by motion (in any degree of freedom) and essential for mission success. Failure to perform such a task introduces risks that compromise vessel safety, delay operations, and, in severe cases, cause the cessation of operations.
Identifying the motion-critical tasks, where the hull and technical equipment constitute the determining factors, depends on operating conditions or basic physical principles. However, it can be challenging when the crew becomes the determining factor because of human variability and subjectivity. Therefore, this study places particular focus on the crew. Nonetheless, the vessel system is socio-technical 57 ; as such, the method for identifying and decomposing such motion-critical tasks must reflect the features of the socio-technical vessel system.
Although several methods exist to study socio-technical systems for different purposes (e.g. evaluating safety, accident analysis, workspace design), Task Analysis is particularly well-suited for identifying and decomposing motion-critical tasks to determine when motions may challenge crew performance. Task Analysis is primarily a structured analysis of a task33,34 and has proven useful in other industries to study human interactions in socio-technical environments and to design tools, machines, systems, workspaces, and tasks. 34 Tipton et al. 58 also introduce Task Analysis as an approach for identifying critical (physically demanding) tasks to determine minimum occupational fitness standards. Motivated by these applications, Task Analysis is adopted in the seakeeping evaluation framework to identify and decompose motion-critical tasks.
Several Task Analysis methods exist; however, the proposed method for identifying and decomposing motion-critical tasks follows the Hierarchical Task Analysis (HTA) and Task Decomposition (TD) methods. HTA and TD are well-established task analysis methods. 34 HTA breaks down an operation into a hierarchy of tasks or plans to be executed. Conversely, TD helps to decompose a task by describing the task in terms of specific features. These decomposition features depend on the analyst’s needs. They could include, but are not limited to, the task’s duration, errors, tools, devices, or decisions needed. 34
Hierarchical task analysis (HTA)
For each of the specified functional requirements of a vessel, HTA helps to break down the functions (operations) into a hierarchy of required tasks. Through the HTA exercise, the motion-critical tasks can be identified objectively. Such tasks, by definition, require precision and coordination, are relatively complex and time-sensitive. The data collection methods for the HTA could include interviews, observations, walk-throughs, video recordings, or a combination of these. The choice of data collection methods for the HTA may vary depending on the needs of the naval architect and the resources available to them. In this context, the HTA facilitates two outputs: (i) a list of tasks in order of performance for the operation in question, and (ii) which tasks are motion-critical.
Task decomposition (TD)
Conversely, the goal of task decomposition in this context is to understand in detail how the crew executes the motion-critical tasks. In task decomposition, task-related features are required, for example, the devices or equipment used, the time taken, errors made, feedback and decisions required. 34 Having the goal for the framework (Figure 1) to become a widely applicable approach, the choice of features suggested for the task decomposition must be general to rule out any ambiguities.
The crew’s tasks can be broadly classified into cognitive and physical tasks. Examples of cognitive tasks include decision-making, monitoring, perception, and communication. Alternatively, tasks including lifting, lowering, pushing, or tracking with a computer mouse belong to the category of physical tasks and can broadly be classified into manual materials handling tasks or manual control tasks. Manual materials handling (MMH) refers to gross arm movements for handling things by lifting, lowering, pushing, pulling, carrying, holding, or restraining. 59 Manual control (MC) tasks refer to continuous fine hand movements with the arm supported or unsupported, for example, tracing, tracking with a mouse, or typing on a keyboard. 60 However, depending on the nature of the task, the performance of a manual materials handling or manual control task can be impaired by postural imbalance.10,28,29
In state-of-the-art literature, Nordforsk 23 categorises tasks into simple light work, light manual work, heavy manual work, and intellectual work for seakeeping evaluations. However, these categories are vaguely defined and easily misconstrued. Despite this, the definitions of these categories employ terms such as keeping balance, causing fatigue quickly, and adaptation to motions, which are the general effects of motions on crew performance. These general effects of motions on crew performance were broadly categorised into Motion-Induced Interruptions (MII), Motion-Induced Fatigue (MIF), and Motion Sickness Incidence (MSI) by Wertheim. 61 MII, MIF, and MSI are the terms related to the negative influence of motions on crews’ biomechanics, energy expenditure, and motivation, respectively. MIIs refer to any motion-related disruptions in an individual’s physical balance during a task’s performance. 62 MSI results when motions cause nausea, vomiting, headaches, dizziness, etc.61,63 Similarly, MIF refers to when motions cause physical or mental fatigue after exposure to motions.12,61 MII, MSI, MIF or all of these effects may co-occur, depending on the nature of the task performed. This further steers the need to decompose the identified motion-critical tasks to know which motion-induced effect(s) to investigate and evaluate.
Identifying when the crew may become fatigued directly (MIF) or less motivated (MSI) from vessel motions can be challenging. However, studies have suggested that making continuous efforts to maintain postural balance and accuracy in manual control and efforts to overcome force resistance in manual materials handling from motion-induced interruptions increases energy expenditure compared to when the task is performed in stationary conditions.10,11,60,64 There is also an established link between the performance of cognitive tasks and postural control65,66 and a link between the location of a task and the rate of MIIs. 67 Hence, the suggested features for decomposing motion-critical tasks are posture, manual materials handling, and manual control to identify possible MIIs that may be detrimental to the performance of a task. Also, the location and time required to complete the task and how these could lead to the onset of MIF and MSI, should be noted. This is because a lack of motivation and fatigue can lead to mistakes that compromise safety.
Data collection methods for TD could include interviews, walkthroughs, observations, questionnaires, video recordings, or a combination of these. The resulting documentation, for example, notations of prolonged time to complete a task, difficulty achieving accuracy, and precision mainly when operating equipment and other machinery, the likelihood of slips and falls, continuous postural control or support from an object to maintain balance, will provide the required input information for Frame B in the framework for seakeeping evaluations presented in Figure 1. Figure 2 presents a flowchart for the suggested data collection process for the HTA and TD.
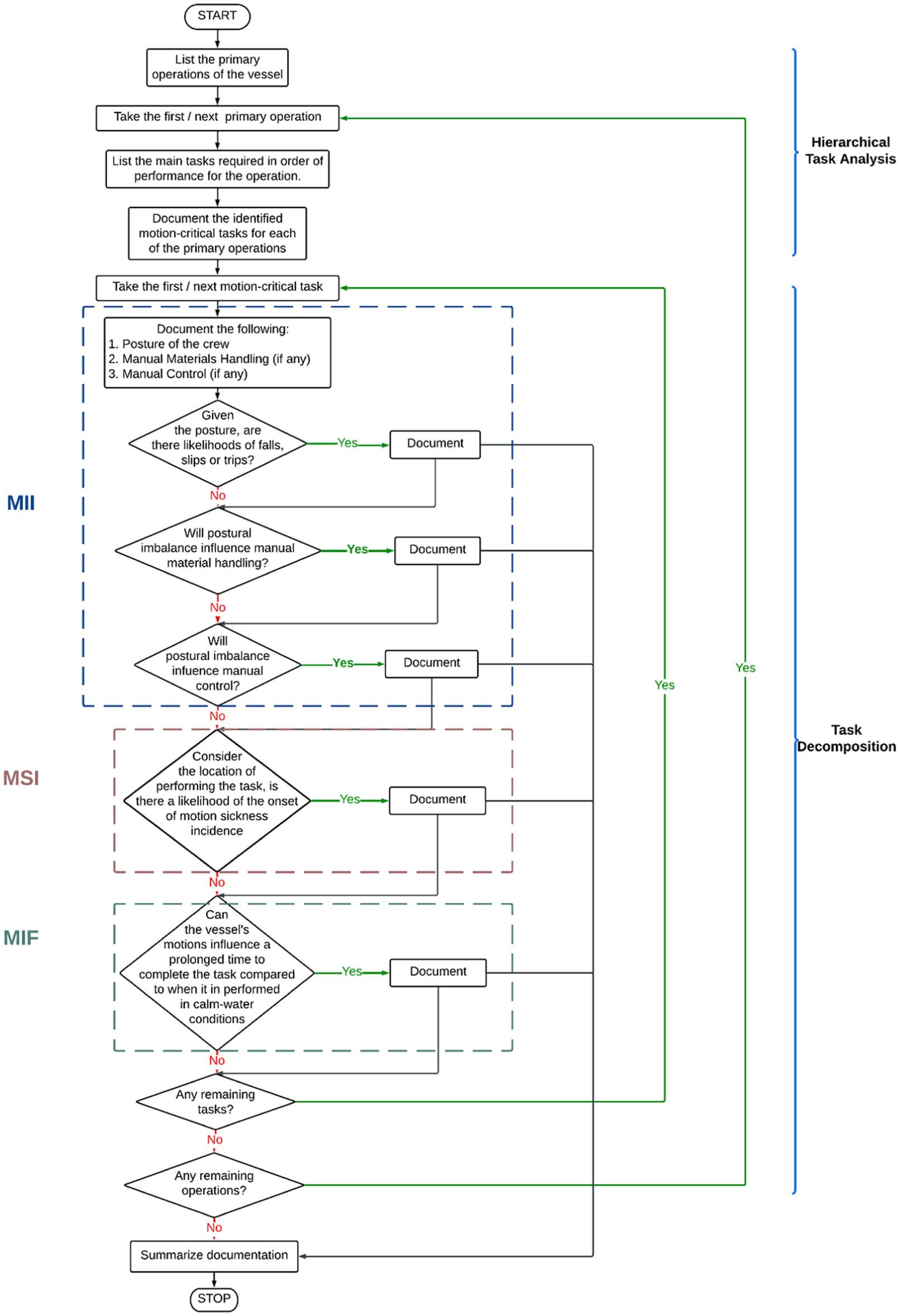
Flow chart for the data collection process for the HTA and TD.
Frame B: Selecting criteria and standards for motion-critical tasks (Translation step)
Criteria, as used here, are motion parameters or models describing events that degrade seakeeping performance, and standards are acceptable thresholds of each parameter or event by which the seakeeping performance of a vessel is evaluated. 9 There exist standards in the scientific literature for the frequency or rate of MIIs. This criterion, specified as MII per minute with corresponding standards mapping different risk levels, was initially proposed by Graham 68 and Graham et al. 69 This criterion and the corresponding standards at different risk levels were later refined by Crossland and Rich 26 (see Table 1). The risk levels represent the likelihood of MIIs occurring within 1 min of performing a task. Crossland and Rich 26 introduced a relationship between the number of MIIs and task effectiveness, given the time to recover from the MII event. Task effectiveness is the ratio of the time it takes to complete a task in calm conditions to the time it takes to complete the same task in rough weather conditions.
Standards for MIIs/min at different risk levels with corresponding task effectiveness. Adapted from Crossland and Rich. 26
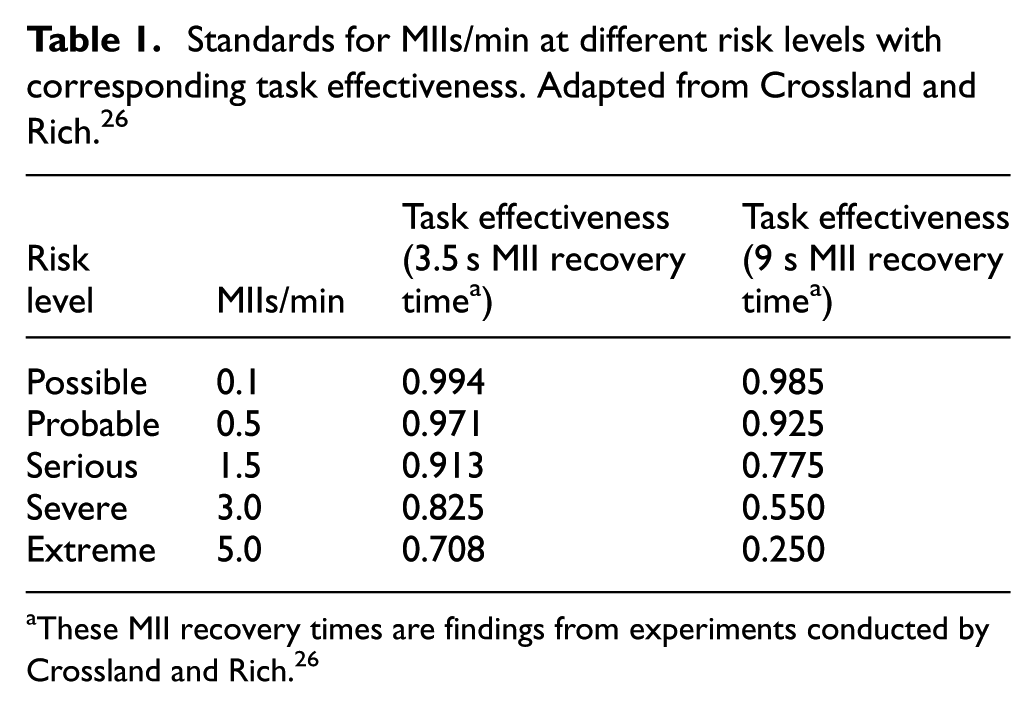
These MII recovery times are findings from experiments conducted by Crossland and Rich. 26
Though this MII/minute criterion does not explicitly differentiate between MII events, Crossland and Rich 26 define MIIs of the crew concerning tasks requiring standing, walking, lifting, and moving objects. The NATO STANAG 4154 22 prescribes a one-tip-per-minute default standard for work on deck. One requirement, however, for implementing this MII criterion is a model that predicts the tipping/slipping event. Langlois et al. 70 summarise these models for predicting tips and slips. The Nordforsk also specifies vertical acceleration (rms) criterion with a 0.275g standard for crew to keep their balance 23 (p. 23); however, it is not explicitly stated in which contexts it is applicable.
Similarly, there are standards for MSI in the scientific literature.21,71,72 In addition, Nordforsk suggests a 0.05g vertical acceleration (rms) standard for motion sickness symptoms 23 (p. 23), following ISO 2631-1 21 for 2 h of exposure to motions for people unacclimatised to vessel motions, for example, passengers. Additionally, findings in Lawther and Griffin 72 suggest that with vertical accelerations up to 1 m/s2 (0.1g) in a 2-h exposure period at an average frequency of 0.2 Hz, vomiting incidence was recorded amongst 40% of their sample population in a localised area. There also exist models for predicting the onset of motion sickness, which give an output on the percentage of crew that becomes seasick.73,74 Such models can predict the percentage of the crew that becomes seasick, which can be compared to a desired evaluation standard.
For MIF, Nordforsk suggests standards of 0.2g vertical acceleration (rms), 0.1g lateral acceleration (rms) and 6° roll (rms) for tasks which cause fatigue quickly and are carried out by people not adapted to motions 23 (p. 23). However, there are no models for predicting the onset of MIF or its effects.22,32
In cases where no applicable criteria or standards exist for a given motion-induced effect, the authors recommend using validated motion prediction models in combination with task-specific defined thresholds based on task criticality and acceptable risk levels defined in collaboration with potential crew, other naval architects or design engineers.
Applying task analysis to evaluate compliance with functional requirements
This section presents the application of the proposed seakeeping evaluation framework and demonstrates its implementation through two case studies. Motion-critical tasks were identified and decomposed using the HTA and TD methods (Frame A). Seakeeping evaluation criteria and standards were then derived based on the decomposed motion-critical tasks (Frame B) and checked for compliance (Frame C).
Methodology
Two Swedish workboats, the Swedish Coast Guard Vessel KBV 202 and the Swedish Maritime Administration’s Fairway Maintenance Vessel, Fyrbjörn, were used as application cases. The vessels were chosen by availability. The HTA and TD followed the flowchart in Figure 2 through semi-structured interviews and observations. The interview questions (in the Appendix) focussed on ascertaining what tasks the crew performed in their daily roles, exploring the effects of motions on their task performance, determining the sequence of tasks in operations, and determining which tasks were motion-critical. Participation was voluntary, and all data were anonymised in reporting.
Identifying and decomposing motion–critical tasks (Frame A)
Two focus group interviews were conducted aboard the case study vessels to identify and decompose motion-critical tasks. Before the interviews, the crew were introduced to the concept and definition of motion-critical tasks to help them identify which tasks in their routines were motion-critical. The crew members who participated in these interviews have worked on the individual vessels for several years and have had sufficient operational experience to provide meaningful insights. The focus group interview aboard the KBV 202 lasted approximately 2 h and included six participants: two engine officers and four deck officers, including the captain. Aboard the Fyrbjörn, this lasted about an hour and involved the captain, first officer, and operations manager. Both these focus group interviews were audio-recorded with the participants’ consent.
Informal observations were made onboard both vessels to complement the interview data and for the decomposition of the identified motion-critical tasks. Two researchers observed onboard KBV 202 during an oil recovery exercise, whilst one researcher observed onboard Fyrbjörn during a lighthouse replacement operation. With consent, video recordings were made during the observations to support the analysis of the interview data and task decomposition. While sea conditions were calm and did not permit direct observation of motion effects, the observations focussed on how the crew executed, coordinated, and interacted with equipment during tasks identified as motion-critical.
The data from the interviews and observations were reviewed to extract a hierarchy of tasks (HTA), identify motion-critical tasks, and decompose them using the chosen features, that is, posture, manual materials handling, and manual control. These features were analysed in light of scientific literature to infer the likely effects of motion (e.g. MIIs, MIF, MSI). Data triangulation, drawing from multiple crew roles, the onboard observations, video recordings, and manual documentation, enhanced credibility. While the first author performed the initial analysis, subsequent refinements were made in collaboration with the co-authors, who critically appraised the analyses.
In summary, each motion-critical task was decomposed and assessed for its vulnerability to:
Motion-Induced Interruptions (MII): falls, slips, trips, or disruptions to task execution due to postural instability or loss of balance;
Motion Sickness Incidence (MSI): physiological discomfort due to motion, influenced by location and task duration;
Motion-Induced Fatigue (MIF): extended task completion time or increased effort under motion conditions.
Figure 2 elaborates on the decision-making process for identifying these effects and guiding the selection of seakeeping evaluation criteria.
Translation into seakeeping evaluation metrics (Frame B)
The output from the task decomposition process, summarised in Figure 2, provided the basis for determining which motion-induced effects, that is, MII, MSI, and MIF, were relevant to specific tasks. These insights enabled the specification of evaluation metrics by selecting existing criteria and standards. However, where criteria were unavailable or inapplicable, predictive models for the relevant motion-induced effects were applied, and their outputs were matched to desired standards or appropriate thresholds.
Case Fyrbjörn
Fyrbjörn is a 35 m catamaran fairway maintenance vessel. Fyrbjörn's primary service is maintaining lighthouses in Swedish waters, including painting, cleaning, and replacements. However, the case study on the Fyrbjörn focussed mainly on lighthouse replacement.
Hierarchical task analysis of the lighthouse replacement operation (Frame A)
Fyrbjörn has a stern ramp that allows the crew to move to and from the lighthouse during maintenance operations. Two large cranes are installed onboard to lift and lower heavy loads to and from the lighthouse. The lighthouse replacement operation observed was performed by a group of four crew members with the following hierarchy:
The shore power supply to the lighthouse was disconnected.
Battery equipment and other electronics were removed.
The crane arm was remotely controlled by the crane operator to move coupling chains and hooks to the top part of the lighthouse.
The load-lifting chains with the hooks were then hooked to the top part of the lighthouse, and the crane hook was decoupled.
The lighthouse was cut from the foundation alongside the balcony with a concrete cutting power tool.
The crane hook was recoupled to the load-lifting chains.
The concrete lighthouse was lifted from the foundation using the crane and lowered onto the vessel’s deck. The load-lifting chains were decoupled from the crane hook.
The remaining concrete slabs were removed with a demolition jackhammer, collected by hand into a container and moved manually onto the vessel’s deck.
The load-lifting chains were coupled to the pre-assembled plastic lighthouse and coupled to the crane hook.
The plastic lighthouse was lifted onto the foundation of the lighthouse with the crane.
The balcony was attached to the lighthouse.
The batteries and other electronic equipment were reinstalled
The lighthouse was reconnected to the shore power supply.
The identified motion-critical tasks for the lighthouse replacement operation (Frame A)
The crew communicated in the interviews that the crane operations for lifting and positioning the lighthouse structures and other loads were particularly motion-critical. They also identified that the swing of the crane jib could affect the vessel’s stability and, consequently, compromise the crew’s safety on deck in more severe weather conditions. These vessel stability issues connected to crane operations become more profound in steps 7 and 10 in the HTA. It was also noted from the observations that the manual handling of loads, particularly when moving materials between the vessel and the lighthouse foundation via the vessel ramps, was also motion-critical, that is, in steps 2, 5, 8, 11, and 12 in the HTA for the lighthouse replacement operation.
Task decomposition of identified motion-critical tasks (Frame A)
Table 2 summarises the postures, manual materials handling and manual control observed whilst the crew performed the identified motion-critical tasks in the lighthouse replacement operation.
Decomposition of the identified motion-critical tasks in the lighthouse replacement operation into posture, manual materials handling, and manual control.
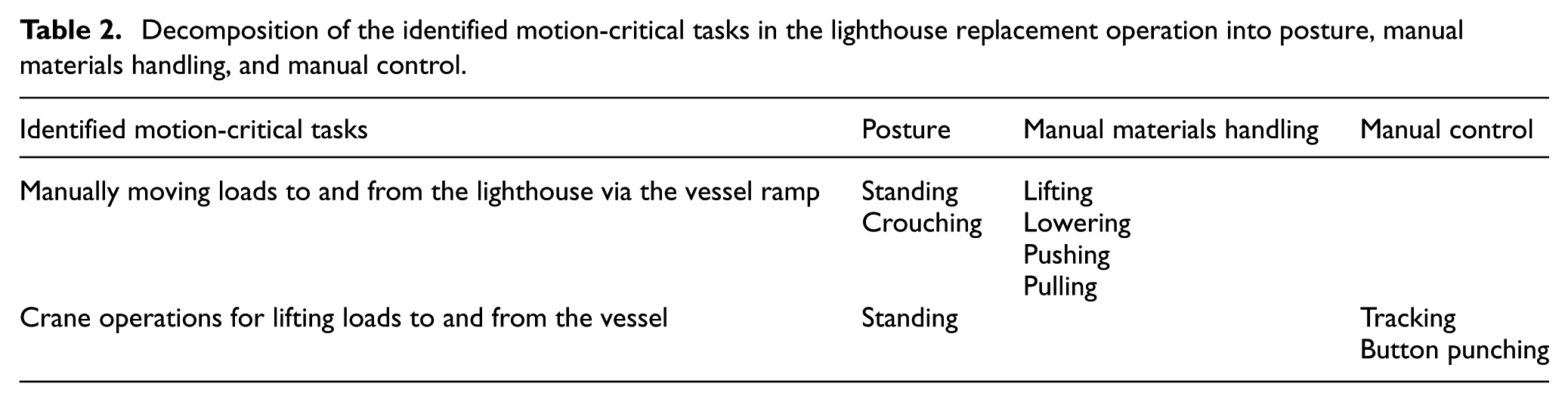
Though no large motions were observed at the ramp because of the relatively calm conditions, as seen in Figures 3 and 4, it is inferred that in rough weather, the crew will likely slip and fall when getting onto the lighthouse foundations via the ladder. Also, the crane operator requires a stable posture to control the crane for moving loads adequately.

The lighthouse before it was detached from the lighthouse foundation (image taken during the vessel’s approach).
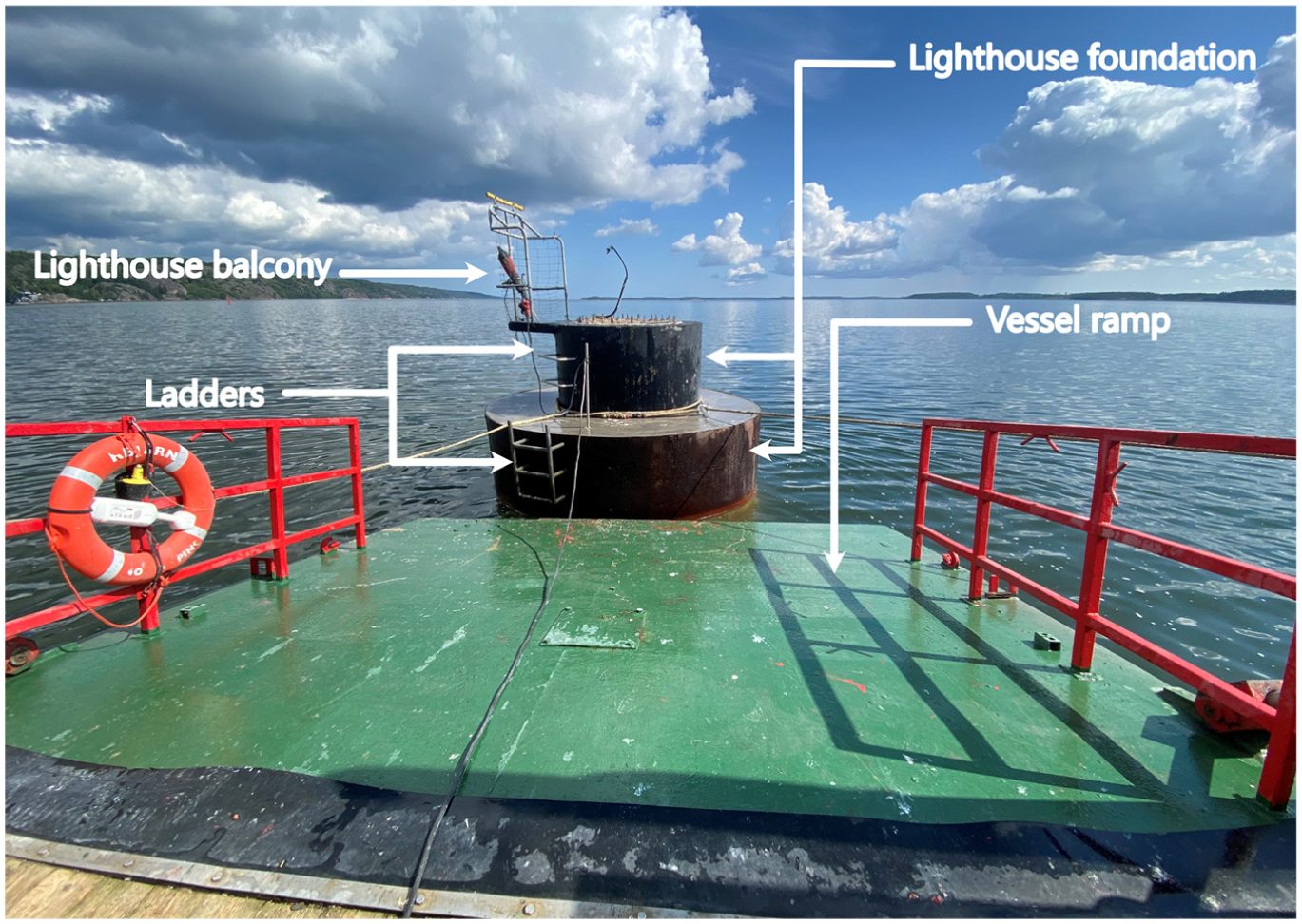
Position of the vessel ramp relative to the lighthouse foundation (image taken after the lighthouse was detached).
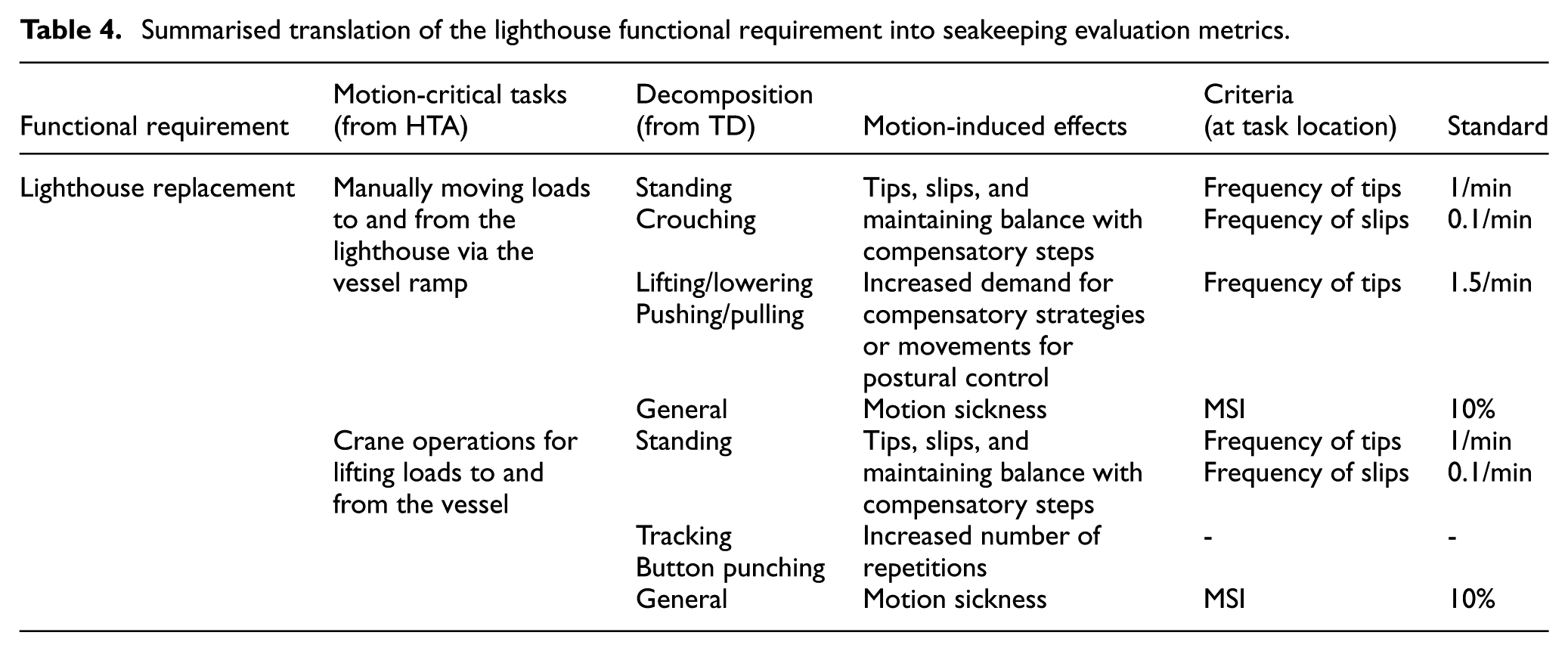
Findings in scientific literature suggest which motion-induced interruptions to expect with the identified postures, manual materials handling, and manual control, for example, in Duncan et al.,10,28,29 Holmes et al., 75 Kingma et al., 76 Matthews et al., 77 McLeod et al., 60 and Silvetti et al. 78 For instance, Duncan et al. 29 studied the effects of motions on resultant MIIs on thoracolumbar kinematics and foot centre of pressure while performing standing and holding (MMH) tasks. They concluded that the body is less stable while performing standing and holding tasks in motions, especially when a corrective strategy must be adopted regularly to maintain postural balance. Similarly, findings in Duncan et al. 28 suggest that when performing lifting or lowering MMH tasks, the participants adopted a compensatory strategy to counteract MIIs, which resulted in increased foot centre of pressure velocities as well as thoracolumbar velocities, which could be injurious to the lower back.
Other studies that support the summary of the expected MIIs include Duncan et al.,10,27 Holmes et al., 75 Kingma et al., 76 Matthews et al., 77 who also investigated the effects of vessel motions on the performance of MMH tasks and McLeod et al. 60 who investigated the effects of motions on the performance of manual control tasks. Table 3 summarises the expected MIIs associated with the postures, MMH, and MC identified, as presented in Table 2.
Summary of the expected motion-induced interruptions – Fyrbjörn.
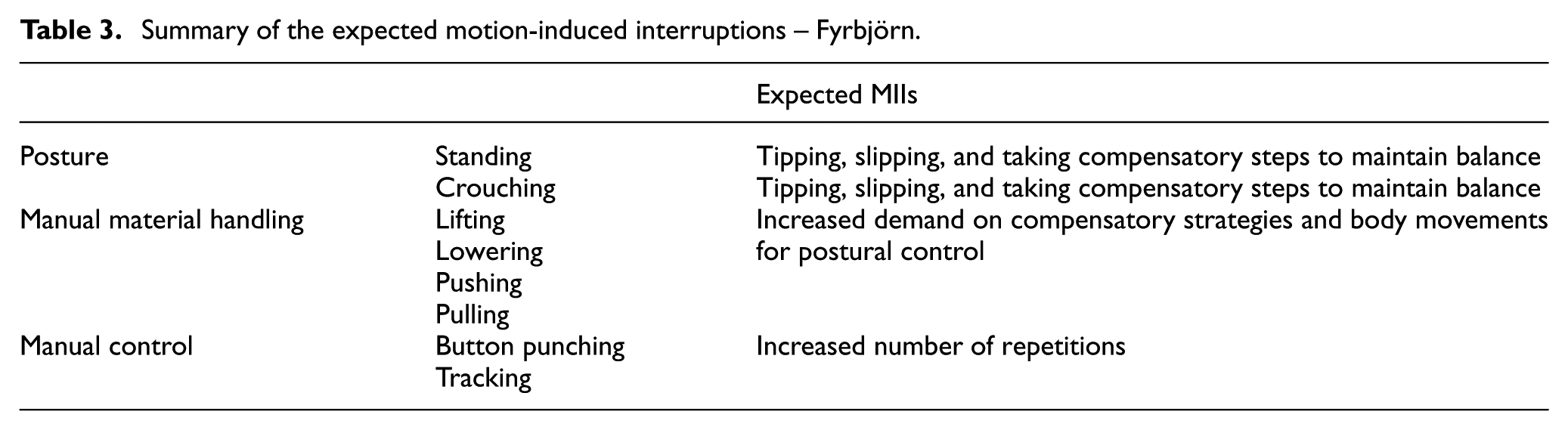
Translation step: Seakeeping evaluation metrics for the lighthouse recovery operation (Frame B)
The tasks for the lighthouse replacement are primarily performed on the lighthouse platform/structure. As such, the evaluation metrics must reflect the short periods where the crew access the lighthouse platform via the vessel ramp. The default NATO STANAG 4154 22 MII standard for work on deck is suggested for the frequency of tips when standing or crouching. Also, since slipping at the vessel ramp is possible and comes with severe consequences, for example, falling into the water or being slammed against the lighthouse by the vessel ramp, a standard of 0.1 slips per minute was chosen (see Table 1). Since the frequency of compensatory steps taken when performing MMH tasks is expected to increase, the standard 1.5 steps per minute was selected (see Table 1). Intuitively, depending on the wave conditions in the local area where a lighthouse is to be maintained or replaced, some crew members may become susceptible to motion sickness.
Though the lighthouse replacement is not time-bound, it is suggested that the percentage of crew becoming motion-sick does not exceed 10% within 2 h of motion exposure. The motivation for this standard is the limited number of crew onboard, the physical intensity of their tasks and the assumption that the crew are well-adapted to vessel motions. This 10% is a suggested standard and was not inferred from existing standards for crew performance, but rather a desired standard for evaluation. Table 4 summarises the translated lighthouse replacement functional requirement into seakeeping evaluation metrics using the framework.
Summarised translation of the lighthouse functional requirement into seakeeping evaluation metrics.
To the authors’ best knowledge, there are no known models or standards for evaluating restrictions during the performance of manual control tasks. This highlights the need for research on model development and defining standards for crew performance in marine environments.
Case KBV 202
KBV 202 is a 52 m (LOA) multipurpose vessel that carries out patrol activities all year round and engages in environmental protection and life-saving missions. The primary operations of the KBV 202 are search and rescue, oil recovery, fire-fighting, and towing, where oil recovery is the case studied here.
Hierarchical task analysis of the oil recovery operation (Frame A)
The KBV 202 has an oil recovery system comprising external cassettes and an oil boom on both the deckhouse’s port and starboard sides. Each oil recovery system has a permanently installed davit system controlled by an electro-hydraulic panel to lift and set up the oil recovery system. The davit system can be controlled from the vessel’s bridge or a control unit on deck. The hierarchy of tasks observed during the oil recovery operation performed by a group of six crew members was as follows:
The oil recovery unit’s electrical and hydraulic system was connected by starting the hydraulic pumps in the engine room and the main power switches on the bridge.
The protective tarpaulin and the protective plate on the cassette were removed.
The cassette’s two-point lifting beam, which is attached to the cassette, was connected to the davit’s lifting beam with the appropriate hook.
With the electronic control panel for the davit system, the cassette was lifted up and moved out to the vessel’s side using the davit. The cassette was then adjusted vertically to keep the cassette and rails vertical and to minimise the load on the davit.
The cassette was aligned with the guide rails on the outer side of the vessel and lowered onto them until the cassette was locked in using the locking mechanism located at the ends that support it (see Figure 5).
The hydraulic hoses were connected between the cassette and the vessel’s couplings, and the oil transfer hose was connected from the pump to the vessel’s connections.
The oil boom was released with the electrical control panel until it could be connected to the float and secured. The air hose from the spreader boom was connected to the oil boom. Also, the filling apparatus and hoses from the vessel’s compressed air outlet to the jib were connected.
The sheet line was connected from the float to the vessel’s bow and onto a capstan winch.
The cassette was lifted, and the locking mechanism was released. The lifting cable of the spreader boom was connected to the crane, lifted out of the storage position, and extended out to the side of the vessel; at the same time, the oil boom was driven out of the reel.
The cassette was driven down to the collection position while ensuring the spreader boom and float were included.
The oil boom was slowly filled with air while the spreader boom was moved forward with the help of the crane (see Figure 6).
The spreader boom lifting wire was disconnected from the crane, and the belt was lashed with a sheet line to the vessel’s rails.
The sheet line was tightened to prevent the sagging of the oil boom. The spreader boom was locked, and the capstan winch was released.

Positions of crew and equipment prior to lowering the oil recovery unit through the guard rails after lifting the cassettes into position with the davits.
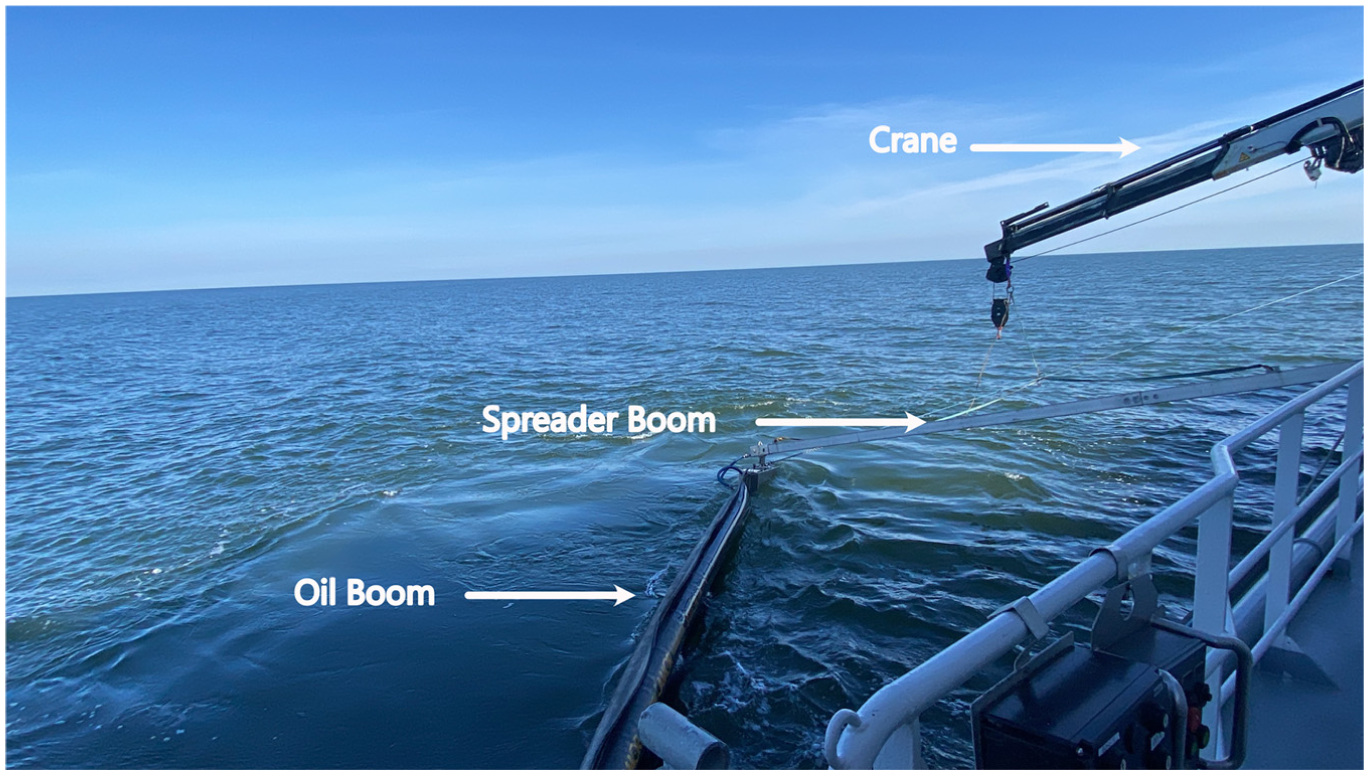
Arrangement of the crane, oil boom, and spreader boom after full deployment for oil recovery operations to start.
The identification of motion-critical tasks in the oil recovery operation (Frame A)
The crew (participants in the focus group interview) identified that the motion-critical tasks for the oil recovery operation were the moments where (a) the cassettes had to be aligned with and lowered down through the guide rails, and (b) where the crane had to be operated to extend the spreader booms. These identified motion-critical tasks correspond to steps 5 and 11 in the HTA for the oil recovery operation.
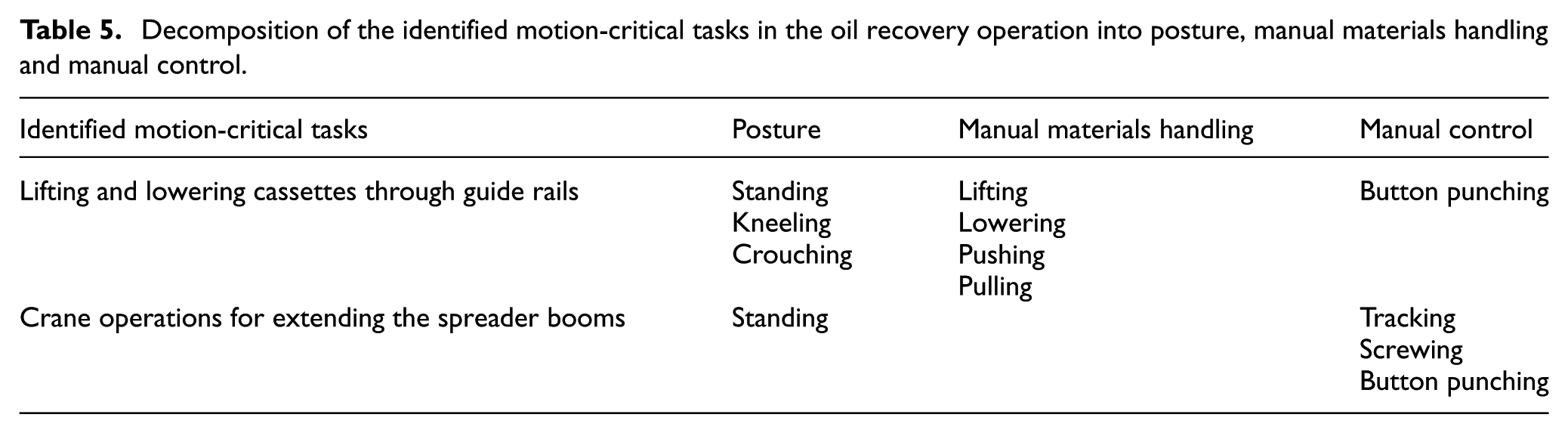
Task decomposition of identified motion-critical tasks (Frame A)
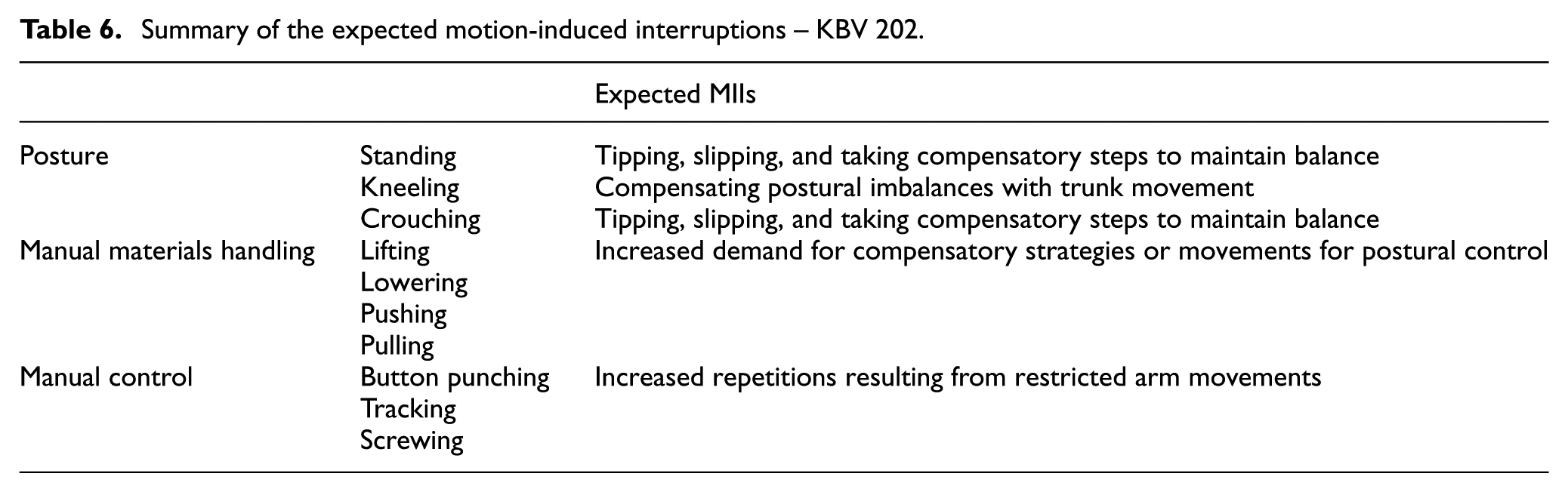
Table 5 presents the observed postures, manual materials handling and manual control of the crew in the identified motion-critical tasks. There were no observed impairments in the manual materials handling and manual control tasks because of the calm sea conditions. However, in relatively rough conditions, postural imbalances arising from vessel motions can impair the performance of these tasks, as identified by the crew. The locations of both tasks are at the vessel’s side by design, and there is the likelihood of slips, trips, and falls, especially when the crew is in a standing or crouched posture. Table 6 shows the expected MIIs with the identified postures, MMH and MC tasks required to complete the motion-critical tasks successfully. Here, the expected MIIs are also deduced from studies in the scientific literature on the effects of motions on crew task performance.
Decomposition of the identified motion-critical tasks in the oil recovery operation into posture, manual materials handling and manual control.
Summary of the expected motion-induced interruptions – KBV 202.
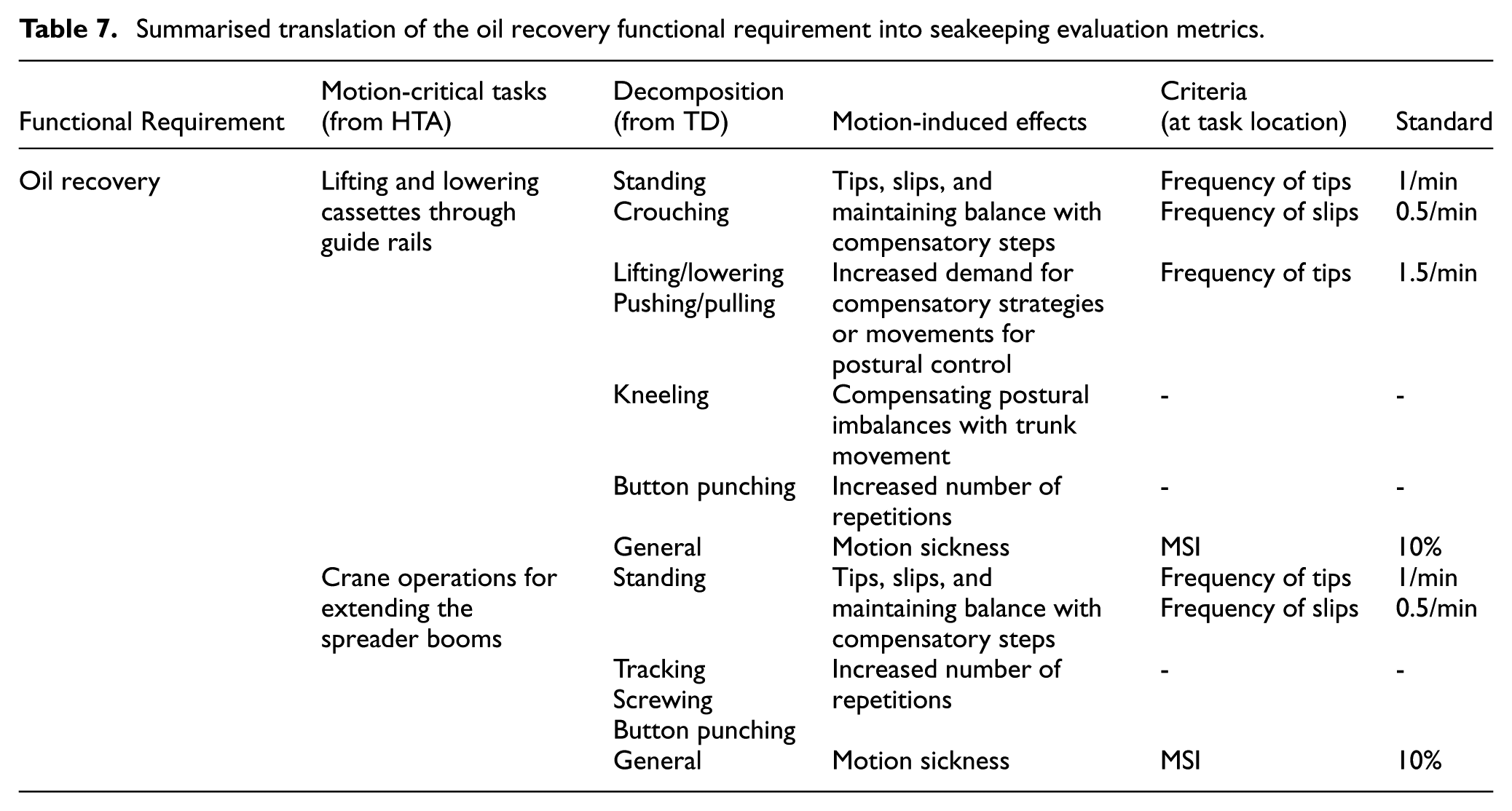
Translation step: Seakeeping evaluation criteria and standards for the oil recovery operation (Frame B)
The expected MIIs, summarised in Table 6, guide what to evaluate to ensure the crew can perform their duties safely. Thus, the criterion for the frequency of tips when standing or crouching and the one tip per minute standard was chosen following the NATO STANAG 4154 default standard for work on deck. The standards for the frequency of slips when standing or crouching and the frequency of taking compensatory steps during MMH tasks stem from Table 1. The reasoning behind selecting a desired standard of 0.5 slips per minute is that it is less likely for a slip to occur, except if the deck is wet from green water or ice. As compensatory-step frequency is expected to be higher in MMH tasks, compared with standing/crouching, a desired standard of 1.5 compensatory steps per minute was selected, given the associated risks with fatigue and lower back injury.
Although there were no specific time frames, the sooner the oil recovery is made, the better it is for the protection of the environment. As such, it was deemed fit that not more than 10% of the crew should become motion sick within 2 h of exposure to motions during the operation. This is a desired standard, and the crew was assumed to be well-adapted to vessel motions. Table 7 summarises the translation of the oil recovery operation into seakeeping evaluation criteria and standards using the proposed framework.
Summarised translation of the oil recovery functional requirement into seakeeping evaluation metrics.
Operability analysis with criteria derived from identifying and decomposing motion-critical tasks (Frame C)
To further elaborate on its potential, this section presents the operability results of the KBV 202 obtained working through the framework and discusses them in light of its original seakeeping evaluation report. The goal is to demonstrate how the proposed method introduces a refined level of operational detail, enabling more tailored seakeeping criteria that align with actual functional requirements and crew tasks.
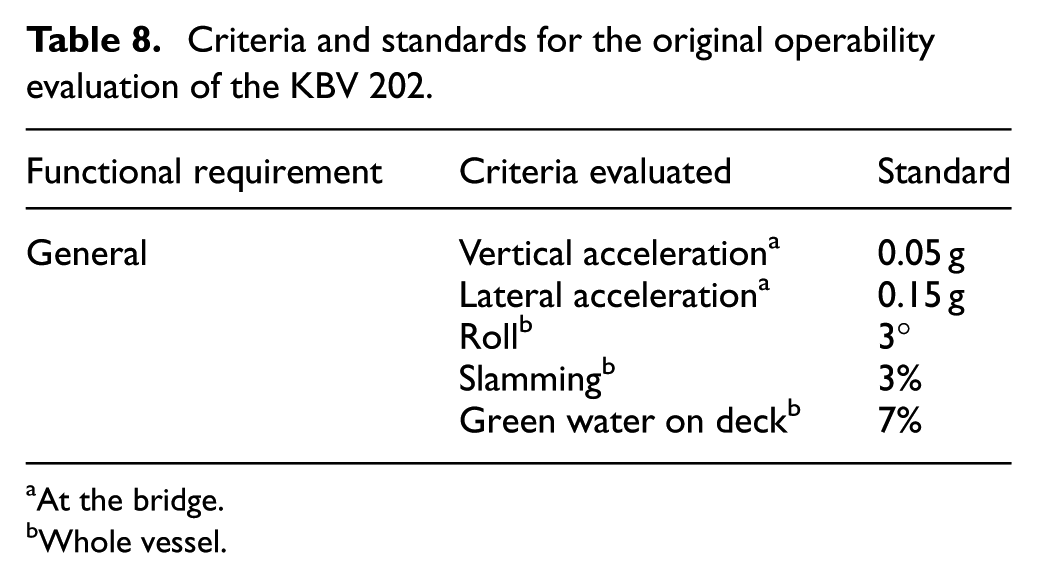
In the original design documentation and seakeeping evaluation report for KBV 202, operability was assessed using standard motion criteria such as roll angle, vertical and lateral acceleration and applying threshold values based on general crew comfort from for example, ISO 2631-1 and the Nordforsk, see Table 8. The evaluation did not explicitly account for how motions may affect specific crew tasks, nor were the evaluation criteria based on specific vessel operations.
Criteria and standards for the original operability evaluation of the KBV 202.
At the bridge.
Whole vessel.
The suggested criteria and standards derived based on the motion-critical tasks identified on the KBV 202 (see Table 7) were used to compute new operability values using models for predicting tips, slips and motion-sickness. The models used in the evaluation for predicting the frequency of tips and slips were Graham’s models for tipping and sliding.68,69,79 In both models, the crew member is represented as a rigid block. Based on the analogies of these models, the rigid block will tip when the balance moment is lost and will slide when the lateral forces exceed the frictional resistance at the base of the block. Similarly, the MSI model proposed by Lloyd 73 was used to predict the onset of motion sickness. This model predicts the probability of vomiting amongst a population exposed to vertical accelerations within 2 h. However, there are no well-known predictive models for when a crew member will take compensatory steps to maintain balance or when arm movements become restricted due to motions. Though this would be appreciated in such an analysis, it cannot be included in the operability analysis presented here. This setback highlights the need to bridge the gap in the development of motion-induced interruption models.
Motion responses were predicted using an in-house linear strip theory code with a digitised model of the KBV 202. The wave headings considered for the motion prediction were 0°, 45°, 90°, 135°, 180°, 225°, 270°, and 315°. These motion responses were used as input into the models to investigate the tipping, sliding, and motion sickness events at the vessel’s starboard side, where the oil recovery equipment is deployed. Operability was calculated as the cumulative probability of not exceeding the desired standards evaluated across all relevant sea states and wave headings, weighted by their likelihood of occurrence. Wave statistics for Almagrundet, a local sea area in the Baltic, as used in the original seakeeping evaluation of the KBV 202, were used. A speed of 0.5 knots (≈0.26 m/s) was considered in the operability calculation, reflecting the vessel’s operating condition during oil recovery.
From the original report, the operability of the KBV 202 using the criteria and standards in Table 8 was calculated as 93% at 5 knots (≈2.57 m/s). Conversely, following the framework presented and the resulting criteria and standards from Table 7, the operability for the oil recovery operation was calculated as ≈14%. This implies that, based on the calculations with the chosen models, the oil recovery operation can be performed safely during only 14% of the year in the Almagrundet sea area, given its hull design. The calculated operability value (14%) for the oil recovery operation highlights how the framework could enhance the seakeeping evaluation detail by directly connecting motion criteria to functional performance. While the original assessment provided a useful overview, the task-informed approach provides a more detailed appraisal of when and where operability is compromised. It supports more precise design decisions and stakeholder communication, especially for vessels with specialised purposes.
Figure 7 gives a visualisation of the operability of the KBV 202 when considering the sliding, tipping and MSI criteria individually (as seen in Table 8). The scatter table plots show in which sea states in Almagrundet the KBV 202 will be operable or not, considering wave headings. The polar plots show how performance depends on heading, which can inform operational design and efficiency particularly when the vessel is already built and its hull design cannot be modified. For instance, based on the models used, the tipping and sliding polar plots indicate that head seas and following seas are favourable for oil recovery operations. However, this observation stems from the formulation of these models, where tipping and sliding are defined to occur only in the lateral plane.
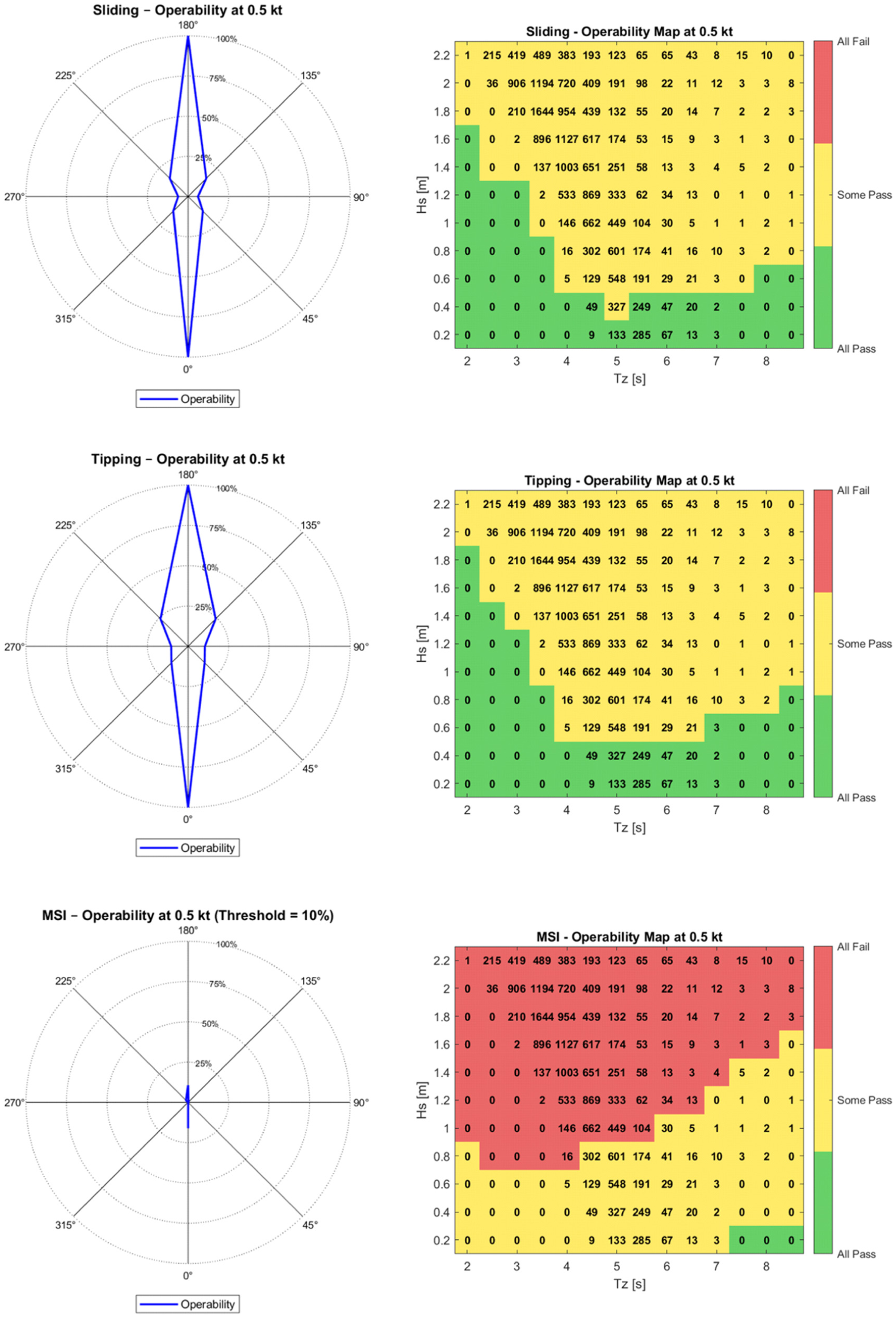
Operability plots for the KBV 202 for the sliding, tipping and MSI criteria. Right: Wave scatter of Almagrundet, showing the operability across all headings for each sea state. All Fail = the criteria fail at all headings; All Pass = the criteria pass in all headings; Some Pass = the criteria pass in some headings. Left: Operability polar plots showing the operability at each heading, highlighting the headings where the criteria mostly fail.
Discussion
The operability results for KBV 202, using criteria derived from identifying and decomposing motion-critical tasks (Frame C), indicate variations depending on the criteria and standards applied. Figure 7 shows reduced operability with respect to sliding and tipping in beam and quartering seas. Moreover, with the 10% MSI standard applied, operations would be prohibited. The sensitivity of the standards set was investigated further using the MSI criteria with two alternative standards: 20% and 30% as a yet higher standard. The results from this sensitivity study, as shown in Figure 8, align with the expected trend that adopting less strict criteria increases operability. However, being permissive with the standards to have better operability values comes with a cost, that is, several crew members may become seasick, consequently abandoning their tasks and leaving the few unaffected with more task burdens. This is why incorporating Task Analysis in the seakeeping evaluation process is invaluable. While permissive thresholds may improve operability values, there is an increased potential of compromising crew safety and performance. Through task analyses, naval architects or design engineers can understand what the crew must do, thereby aligning the selection of criteria and standards to crew safety and performance.
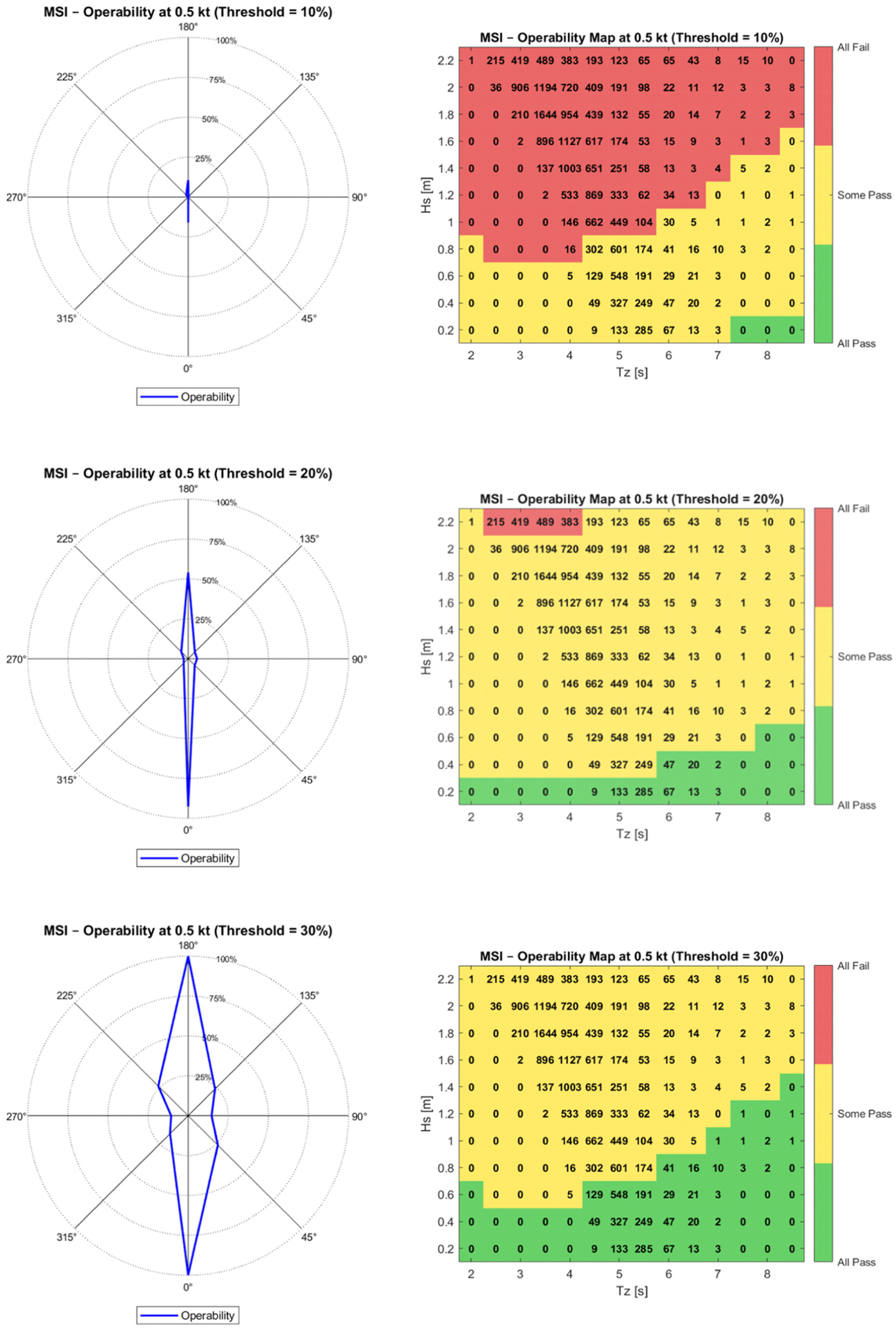
Variation of operability outcomes with varying MSI thresholds. Right: Wave scatter of Almagrundet, showing the operability across all headings for each sea state. All Fail = the criteria fail at all headings; All Pass = the criteria pass in all headings; Some Pass = the criteria pass in some headings. Left: Operability polar plots showing the operability at each heading, highlighting the headings where the criteria mostly fail.
The application of Task Analysis for identifying and decomposing motion-critical tasks has been demonstrated aboard existing vessels; however, its intended application is during early-stage seakeeping evaluations. In such cases, crew (or experts) who have experience working with similar tasks or on comparable vessels or who have observed the performance of similar tasks can inform the Task Analysis.
Likewise, Task Analysis can be incorporated in seakeeping evaluations of vessels being recommissioned to serve other purposes and with different functional requirements.
The proposed framework, however, is sensitive to the formulation and accuracy or robustness of the models used to predict motion-induced effects. Since these models provide generic approximations, the operability values may not truly capture reality. Only a few models are available in the literature for MII and MSI, and none for MIF. Though this poses a significant setback in the proposed seakeeping evaluation framework, it also highlights a research area that can be explored further. Moreover, while there exist models for predicting motion sickness,71,73,74 these primarily estimate vomiting incidence based on vertical motion exposure. They do not account for the broader range of motion sickness symptoms such as dizziness, headaches, cold sweating, and blurred vision, mostly preceding vomiting. 63 Developing models that predict overall susceptibility to motion sickness, including the wider spectrum of symptoms, would significantly enhance the accuracy and applicability of MSI evaluations within the proposed framework.
Notably, there exist studies on how motions affect the performance of Manual Materials Handling and manual control tasks,10,28,29,60,75–78 whose findings can contribute to developing models for the range of such tasks for seakeeping evaluations. Such models must be simple to implement and take predicted motion responses as input. Also, further research aiming to set working standards for motion-induced interruptions that can be tolerated in the crews’ differing daily tasks will enhance the applicability of the framework. These can be realised through the collaborative efforts of naval architects, biomechanists and experienced crew. The authors anticipate setting the stage for further research in this area.
The accuracy of the motion prediction tool used is also significant. Since the tipping, sliding, and MSI models are all sensitive to roll and lateral accelerations, any inaccuracies in the predicted motion responses may propagate into the operability results. Although linear strip theory offers computational efficiency, it uses approximations for computing roll damping and does not capture complex phenomena such as non-linear roll-damping principles. 80 Improving the fidelity of motion prediction tools could significantly improve the robustness of task-based seakeeping evaluations.
A key limitation of the study presented in this paper lies in the translation step, that is, the selection or matching of criteria and standards for the identified and decomposed motion-critical tasks. In this study, the translation step relied heavily on expert judgement and ad hoc criteria and standards due to a lack of well-established criteria for crew performance and safety in marine work environments, only to demonstrate the feasible use of the framework. Also, due to the lack of established standards in the literature on crew performance at sea, selecting the standards for increased repetitions during manual control tasks and compensatory strategies for postural balance while kneeling was challenging. To bridge this gap, risk assessment methods offer a promising approach for specifying standards in motion-rich environments and warrant further research. Such risk-based approaches are currently employed in setting operational guidelines onboard most vessels, 81 though primarily on the analogy of weighing the costs versus benefits. Though risk-based methods for setting standards have yet to be adopted in seakeeping evaluations, the approach can ensure accurate reflections of crew vulnerability limits and performance.
Motions influence all tasks at sea, and addressing the minute details of how a vessel’s seakeeping affects the performance and safety of the crew may be challenging, daunting, and even ambiguous. However, identifying motion-critical tasks, as emphasised in this article, introduces simplicity in efficiently evaluating a vessel’s seakeeping since such tasks are characterised by execution time frame, precision, and coordination. The study presented in this paper only focussed on the crew as part of the vessel system; however, following similar principles and approaches, such a study could be extended to include onboard equipment, machinery, and the hull, as depicted in the framework.
Although marine vessel design is trending towards higher degrees of autonomy, the seakeeping evaluation framework presented here will still be relevant. While autonomous shipping aims to rule out the “human element,” considerations may be made for the crew to be onboard intermittently, for example, for commissioning, maintenance, transits, or even in emergencies. However, if the fully autonomous concept is adopted even in contingency, the framework would still be useful for a seakeeping evaluation, though only focussing on the hull and onboard equipment without changes to the rest of the framework (see Figure 1).
The findings from the KBV 202 operability study underscore the limitations of traditional seakeeping evaluations. Traditional seakeeping evaluations mainly prioritise hull performance and present an aggregated operability value, without considering specific operational demands. 32 The proposed framework addresses this gap. Grounded in Task Analysis, the framework facilitates the identification of motion-critical tasks. It informs where motions begin to interfere with safe task executions, through task decomposition. By linking these motion-critical tasks to functional requirements, the framework ensures more operationally relevant seakeeping evaluations and supports the Safety-II perspective, focussed on ensuring that operations succeed.
Conclusions
This study has presented a framework for seakeeping evaluation that integrates Task Analysis to link motion-critical tasks to functional requirements and facilitate the selection of appropriate criteria and standards. It is concluded that:
i. The proposed framework promotes crew-centred and task-oriented seakeeping evaluations, moving beyond traditional hull performance-based evaluations.
ii. The selection of criteria and standards that reflect tasks and operational demands is critical.
iii. Integrating Task Analysis in the seakeeping evaluation process enables the identification of motion-critical tasks and assessment of whether functional requirements can be met in specified sea environments.
iv. The framework supports the Safety-II perspective by focusing on ensuring the successful performance of tasks and operations.
However, some limitations of the framework were identified:
i. The lack of well-defined, validated, and context-based MSI, MII, and MIF standards.
ii. The absence of validated models for predicting the effects of motions on crew, such as indicators and rate of MIIs, susceptibility to MSI and the onset of MIF.
Future work should therefore aim to develop risk-based methods to inform the specification of standards for seakeeping evaluations and prioritise the development and validation of models for investigating the effects of motions on the crew.
Footnotes
Appendix
The questions that guided the interviews in the case studies are presented below:
What is/are your role(s) onboard?
What tasks do you perform in your role that contribute to the primary operation(s)?
Acknowledgements
The authors would like to express their gratitude to the Swedish Coast Guard and the Swedish Maritime Administration for their valued collaboration and support in this study.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is the result of work in the RISE/SSPA-led project “ASK - Arbetsbåtars sjöegenskapskriterier” (TRV2019/12462) and KTH’s Ship Dynamics Program (TRV 2021/99989), both funded by the Swedish Transport Administration.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.