
Abstract
Ball bearings are an integral part of many machines and mechanisms and often determine their performance limits. Vibration, friction and power loss are some of the key measures of bearing performance. Therefore, there have been many predictive analyses of bearing performance with emphasis on various aspects. The current study presents a mathematical model, incorporating bearing dynamics, mechanics of rolling element-to-races contacts as well as the elastodynamics of the bearing outer ring as a focus of the study. It is shown that the bearing power loss in cage cycles increases by as much as 4% when the flexibility of the outer ring is taken into account as a thick elastic ring, based on Timoshenko beam theory as opposed to the usual assumption of a rigid ring in other studies. Geometric optimisation has shown that the lifetime power consumption can be reduced by 1.25%, which is a significant source of energy saving when considering the abundance of machines using rolling element bearings. The elastodynamics of bearing rings significantly affects the radial bearing clearance through increased roller loads and generated contact pressures. The flexible ring dynamics is shown to generate surface waviness through global elastic wave propagation, not hitherto taken into account in contact dynamics of rollers-to-raceways which are generally considered to be subjected to only localised Hertzian deflection. The elastodynamic behaviour reduces the elastohydrodynamic film thickness, affecting contact friction, wear, fatigue, vibration, noise and inefficiency.
Keywords
Introduction
Key issues affecting the performance of rolling element bearings are wear and fatigue of rolling mating surfaces,1–3 as well as vibration and noise.4–7 Thermal stability also plays an important role in terms of bearing’s limiting performance.8,9 All these parameters act in an integrated manner, determining the eventual bearing performance. Furthermore, during operation, the rolling elements within a bearing undergo complex motions such as rolling and sliding relative to the raceway grooves, as well as convergence and separation of the bearing rings. 10 Therefore, use of a bearing dynamic model is a prerequisite to any investigation of its performance, such as reliability, structural integrity, fatigue, wear and operational efficiency.
Sunnersjö 11 was one of the first to investigate the effect of applied inertial forces using a two degree of freedom lateral transverse analytical bearing dynamics model. Meyer et al. 12 studied the effect of distributed defects such as waviness of the rolling mating surfaces upon the bearing vibration response using an analytical two degrees of freedom bearing model. Rahnejat and Gohar 5 presented a 2-degree of freedom radial deep groove ball bearing model with lubricated ball-to-races contacts under various regimes of lubrication. They also studied the effect of inner race waviness. Their work was extended by Aini et al. 13 to a 5-degree of freedom bearing dynamics model, including the effect of bearing moment loading, as well as applied axial thrust. With rolling element bearings, the effect of roller tilting, yawing and squeeze film motions, as well as lubricated contacts were taken into account by various researchers.10,14,15 Misaligned rollers cause high edge contact pressures14–17 which can lead to fatigue spalling and pitting. The presence of faults such as cracks and pits on rolling surfaces cause secondary bearing vibrations which have been extensively studied through numerical analysis as well as signal processing of vibration response of bearings.18–20 Other faults include the presence of off-sized bearing elements 21 as well as unstable cage dynamics. 22
In most of the analyses described thus far the bearing housing has been considered as rigid. However, in many applications housing compliance can lead to rotor/spindle misalignment. Therefore, its effect should normally be considered.23,24 Most analyses also consider the rolling elements to be massless (negligible mass and inertia, when compared with the mass of the supported rotor). When, this assumption cannot be upheld, inertial dynamics of individual rolling elements should be taken into account leading to much more complex n-degrees of freedom bearing dynamics.25–27 The effects of generated contact friction and heat generation are also taken into account in some studies.8,9,28 Therefore, there are many interacting multi-physics issues which affect bearing dynamics, hence the plethora of research work in this area.
Non-concentricity of bearing rings or bearing housing plays an important role in its dynamics as it affects the bearing radial clearance. Such issues can also be caused by assembly faults in the case of bearing housing and through thermo-elastic deformation of bearing rings under generated distributed contact loads and temperature. These often limit the operational performance of bearings. Cavallaro et al. 29 presented a thin ring elastic model to account for the centrifugal expansion of the bearing raceways using the 2-dimensional equation for a disk detailed by Aramaki et al. 30 for high speed machine tool spindles. Cavallaro’s model was further developed by Leblanc et al. 31 for thin elastic rings. They noted that the elastic model was a reasonable approximation for thin rings subjected to a static load. The FEA approach has been employed by Daidié et al. 32 as well as by Olave et al., 33 requiring high mesh density around the rollers, which leads to long computation times and limits the use of this approach under transient conditions. Other FEA-based models include the work of Lacroix et al., 34 linking FEA of the rings to an analytical contact model and Wagner et al. 35 who used an FEA model of the flexible outer ring to demonstrate its influence upon the performance of a high speed ball bearing.
The current paper presents bearing dynamics, including the transient flexible response of the bearing’s outer ring. In this approach both the localised Hertzian deflection and global deformation of the bearing’s outer ring are taken into account. For this purpose, the bearing’s outer ring is considered as an elastic thick complete circular ring. It is important to note that in real applications, the bearing rings should be considered as thick rings, when the radius-to-width ratio is less than 10 according to Chidamparam and Leissa. 36 The numerical solution of a full bearing dynamics with a flexible ring is quite time consuming. Therefore, the investigation into the effect of ring elastodynamics on the vibrations of radial ball bearings requires the development of an initial thick ring dynamic model for amalgamation into an appropriate analysis. Thus, the outer ring elastodynamic model is based on the thick ring theory established originally by Timoshenko. 37
Problem formulation
Model description
The lateral excursions of the bearing centre determine the share of dynamic load carried by the ball complement in their orbital motion (Figure 1).
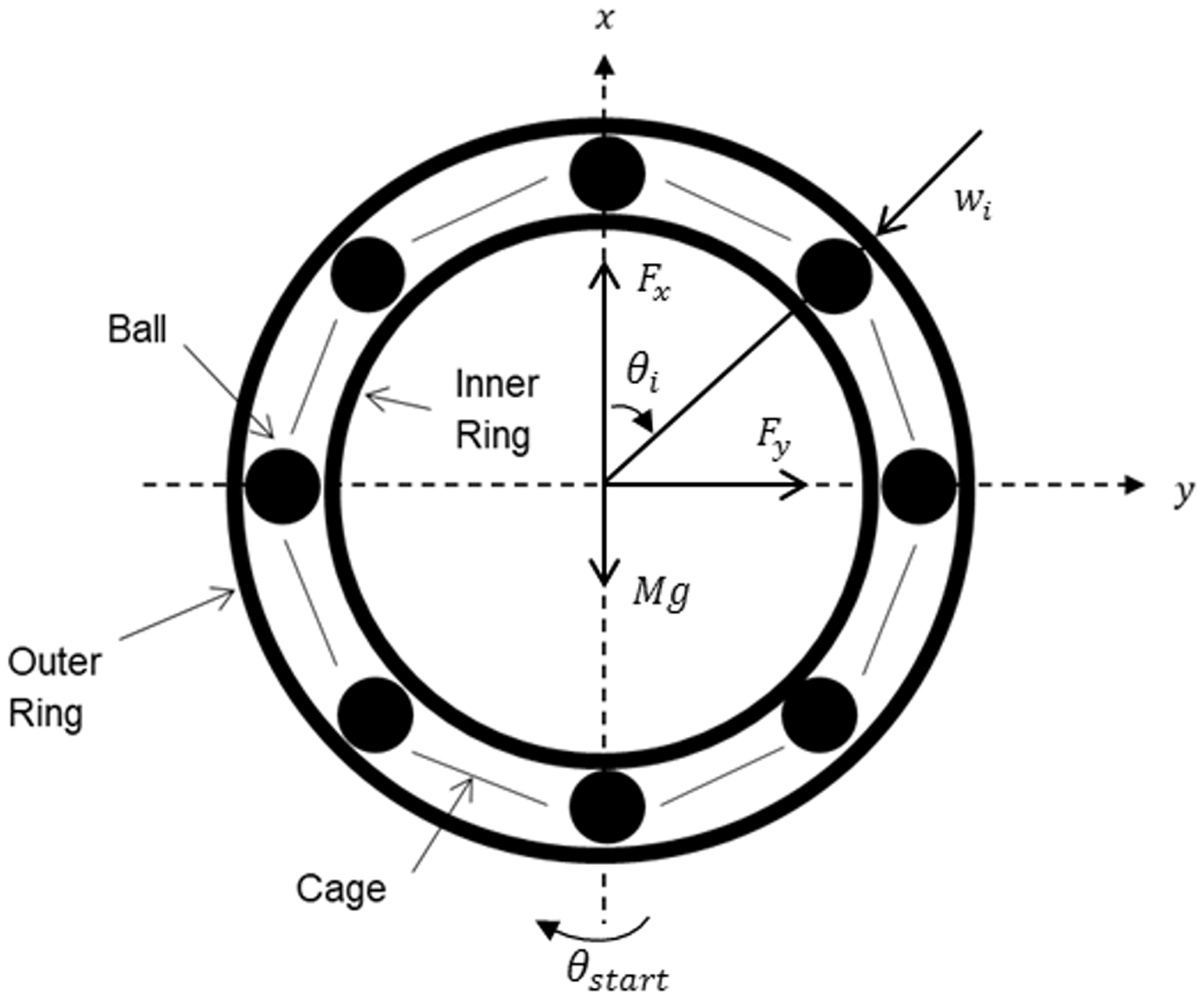
Two degree of freedom deep groove ball bearing model.
The following assumptions are made in arriving at a 2-DOF bearing dynamics model:
The outer and inner bearing races are perfectly circular The balls are perfectly spherical with identical diameters The balls are considered as massless and equi-pitched around the bearing rings The bearing is loaded only in the radial transverse directions. The thermal effects are neglected. The inner bearing ring and the supported rotor are rigid. The effect of structural and contact damping is neglected.
The above assumptions lead to a 2-DOF bearing model for a radial deep groove ball bearing, accounting for the oscillations of the rigid supported shaft in the x and y radial transverse directions (Figure 1). This is the basic 2-DOF bearing dynamics model described in Refs.5,38
The equations of motion become:



The localised contact deflection,

The deflection in equation (4) is altered to include the effect of an outer flexible ring’s local radial deflection,

The combined contact stiffness non-linearity, K of any ball to the inner and outer races’ contacts is determined as40,41:



Contact mechanics parameters. 41

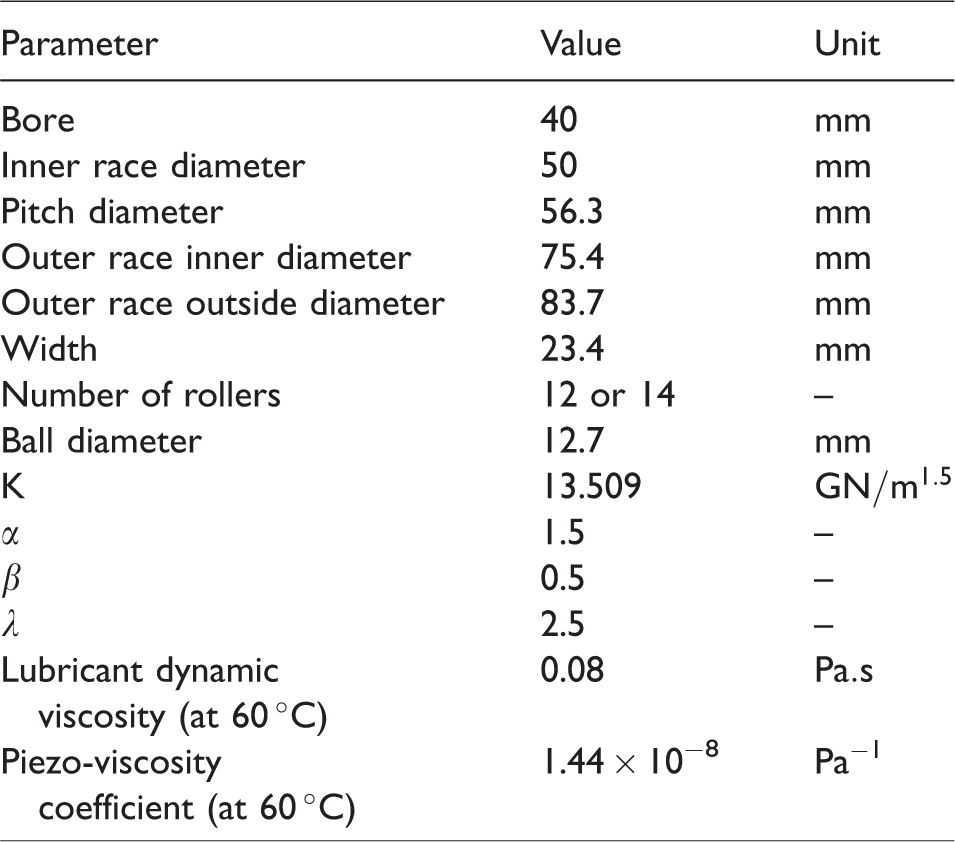
Bearing specifications.
The semi-major and semi-minor half-widths for the elliptical contact footprint for the ith ball-raceway contact becomes40,41:


The effective contact stiffness for ball-to-the inner and outer raceways becomes:

The maximum Hertzian contact pressure is
39
:

And the Hertzian pressure distribution for each ball to races contact is obtained as:

The Hertzian theory adequately describes the mechanics of contact of ball-to-raceways’ grooves when the contact conditions in practice follow elastohydrodynamic regime of lubrication, which is the case for bearings with no emerging clearances, and with adequate preloading and interference fitting. However, the Hertzian theory assumes frictionless contact; an assumption which may be relaxed by stating a coefficient of friction. However, the correct approach is to calculate the viscous shear of the lubricant. Non-Newtonian shear of the lubricant leads to thin films and flattening of asperities on the mating opposing surfaces. Thus, friction can be obtained through determination of contact film thickness and shear stress.
The instantaneous central contact lubricant film thickness, assuming isothermal conditions, is obtained for any ball-to-race contact using the extrapolated lubricant film thickness equation of Hamrock and Dowson
42
as:




In addition, 
The non-Newtonian shear stress is determined as
43
:


The instantaneous generated viscous friction for the ith contact becomes:

And the instantaneous power loss is determined as:

The specifications of the bearing considered in this study are listed in Table 2. To guard against a number of undesired phenomena such as ball skidding, skewing, rattling and cage collisions, a 5 µm radial interference fit is applied. Therefore, all the ball-to-races contacts remain in compression throughout their orbital motions (and the classical Hertzian contact theory can be upheld). The radii of curvature of the raceways’ grooves ensure a contact conformity of merely 7% and a contact angle of
Elastic outer ring vibrations: An overview
In order to include the global modal deflection of an outer flexible ring into the 2-DOF bearing dynamics (
Research in the dynamic behaviour of thin rings has received more attention, mainly because of the importance of incomplete circular compression rings as seals in internal combustion engines.53–55 In-depth study of bearing races as thick rings and its integration with bearing dynamics is long overdue. This is the approach undertaken in this paper. For a 2-DOF bearing dynamic model the in-plane flexural dynamics of the thick outer bearing ring is developed. The out-of-plane outer race dynamics occurs in the axial direction of the rotor, which is not taken into account in the current 2-DOF bearing dynamics. The out-of-plane motion is resisted by the dry friction between the outer race and bearing housing. The in-plane vibrations are included in the 2-DOF bearing dynamics model.
In-plane elastodynamics of thick rings
Figure 2 shows a segment of a thick circular ring, representing the outer race of a ball bearing. Definitions of all terms used in the methodology are shown in the figure, as well as the employed coordinate system and the in-plane forces and moments acting on an element of the ring.
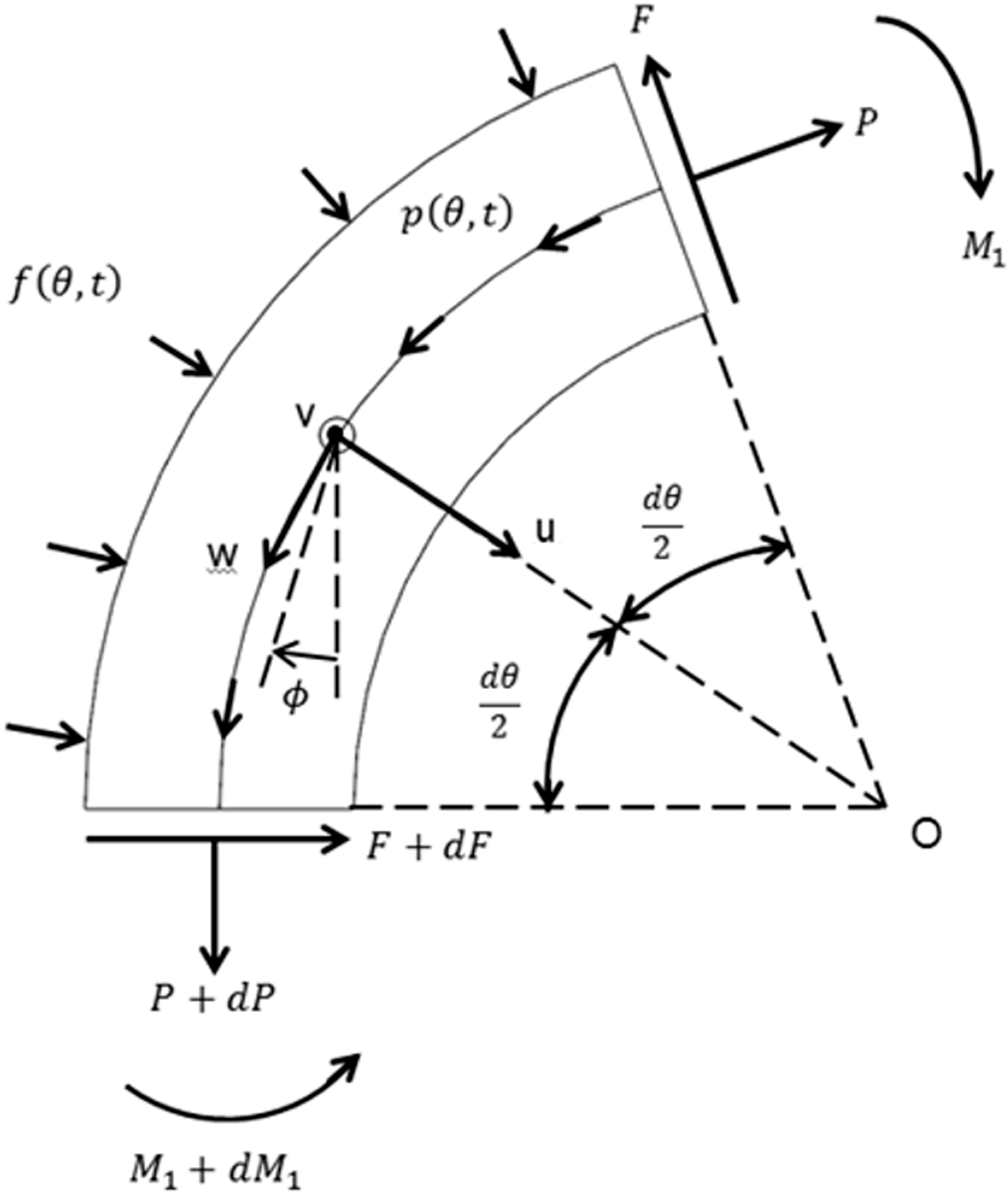
A ring segment subjected to in-plane vibrations.
The in-plane equations of motion for a thick ring segment, including shearing deformation and rotary inertia are obtained as47,56:

The following assumptions are made in the derivation of the in-plane motion of a thick ring segment:
The ring cross-section remains unaltered. The undeformed ring segment centreline follows a circular arc. There are no boundary conditions applied to the ring segment. Structural damping effect is neglected.
Method of solution
The coupled equations of motion (1) and (2) are solved together with equations (24) to (26) for the radial in-plane motion of the flexible outer ring using a combination of central finite difference method (FDM) and step-by-step Newmark linear acceleration technique. A mesh dependency study is carried out to ensure independence of the results from chosen mesh density.
The in-plane equations of motion are rearranged in order to obtain the equivalent mass (
The formulation can then be used to obtain the natural frequencies of the flexible thick outer bearing ring system, where 

The resultant mode shapes of the structure can then be found using:

In this manner the frequency response of the bearing includes the response of its outer flexible ring as well as the speed-dependent bearing frequencies due to cage rotation and its multiples.
Results and discussion
Validation of the thick ring methodology
It is essential to validate the expounded method with available experimental measurements.
Like other similar studies, the validation is carried out against the reported measurements of Kuhl. 45 Table 3 lists the specification of the thick circular ring in Kuhl 45 for which in-plane ring response was reported.
Material and dimensional properties of thick circular ring. 45
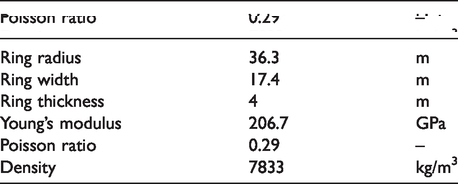
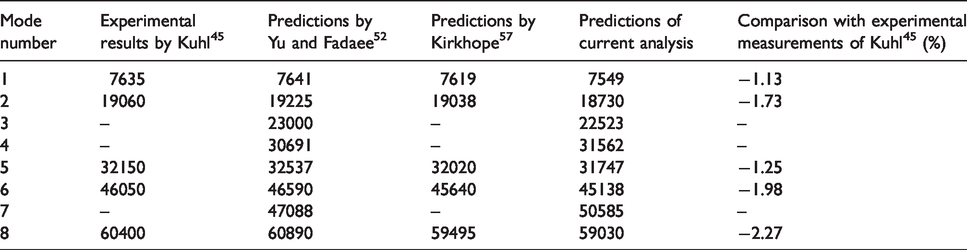
Table 4 lists the predicted results alongside the reported measurements of Kuhl. 45 A good agreement is observed between the predictions and measurements of Kuhl 45 (a maximum difference of 1.34%), as well as the analytical solutions of Kirkhope 57 and those of Yu and Fadaee, 52 all using the same validation example. The complete ring analysed in Table 4 has a thickness-to-radius ratio of approximately 0.479, demonstrating the applicability of the theory to very thick rings for in-plane motions. Figure 3 shows the first three in-plane flexible mode shapes.
In-plane frequency response.
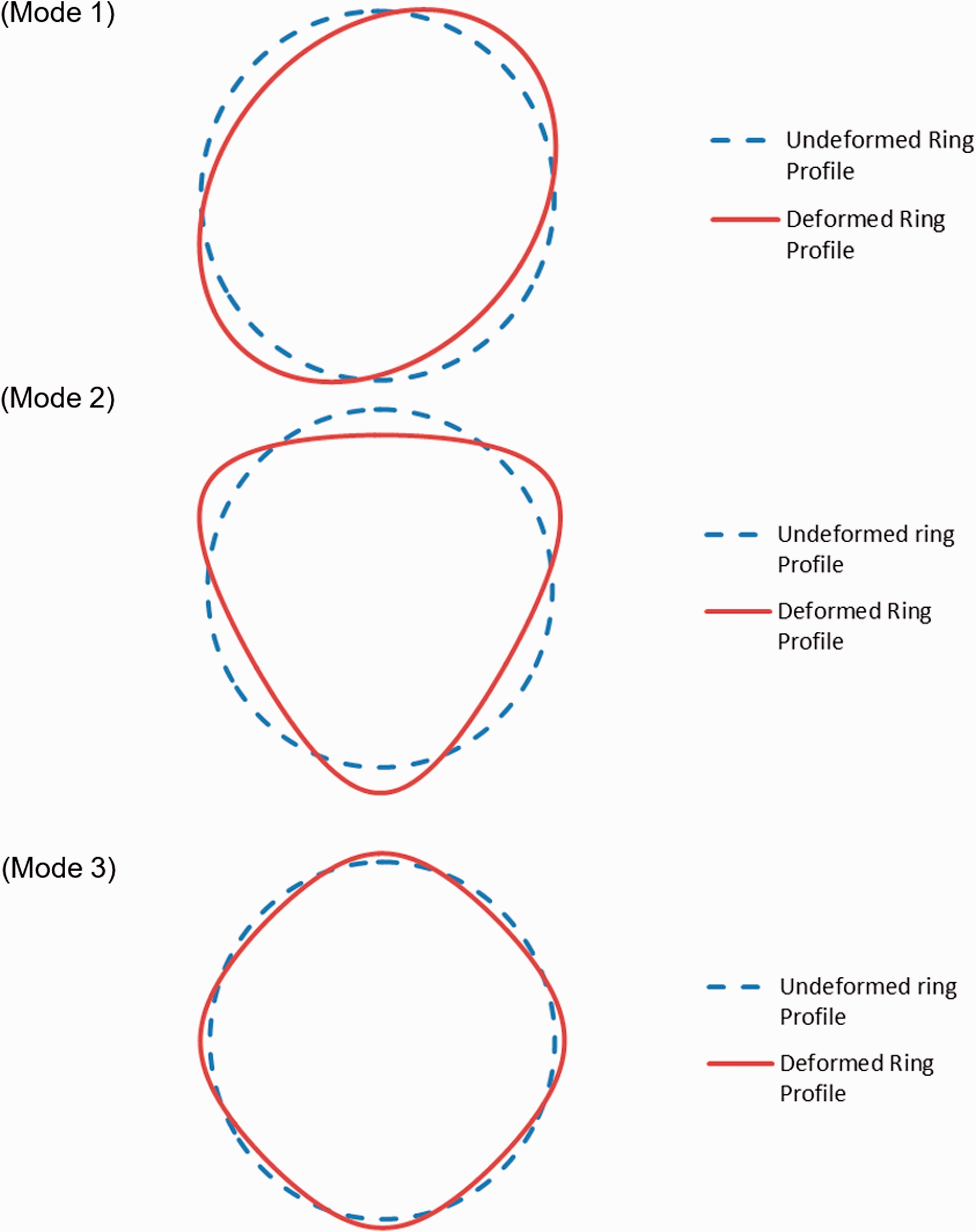
First three predicted in-plane modes of the ring.
A closer look at the results in Table 4 indicates that the reported frequencies in this study slightly underpredict those reported by Kuhl. 45 The same trend can also be observed for the results reported by Kirkhope. 57 The results reported by Yu and Fadaee, however, seem to slightly overestimate the experimental results. Such variations between numerical and experimental results can also be observed elsewhere. For example, the results obtained by Gardner and Bert 58 also underpredict the same experimentally obtained frequencies, while the results reported by Lin and Soedel 59 underestimates some of experimental frequencies, and overpredicts some other such as those associated with mode numbers 2 and 3 by a very small amount of 0.09%. In the case of the current study, it is expected that the predicted results to improve further by, for instance, increasing the mesh density in the employed finite difference method. The experimental results would also vary with sampling time. Given these issues one can conclude that good agreement has been found.
Effect of flexible ring elastodynamics on radial ball bearing performance
Figure 4 shows a typical cyclic ball-to-races contact load in the radial transverse direction
5
during a cage cycle with the assumption of rigid bearing rings. This is for the case of a radial interference fit of
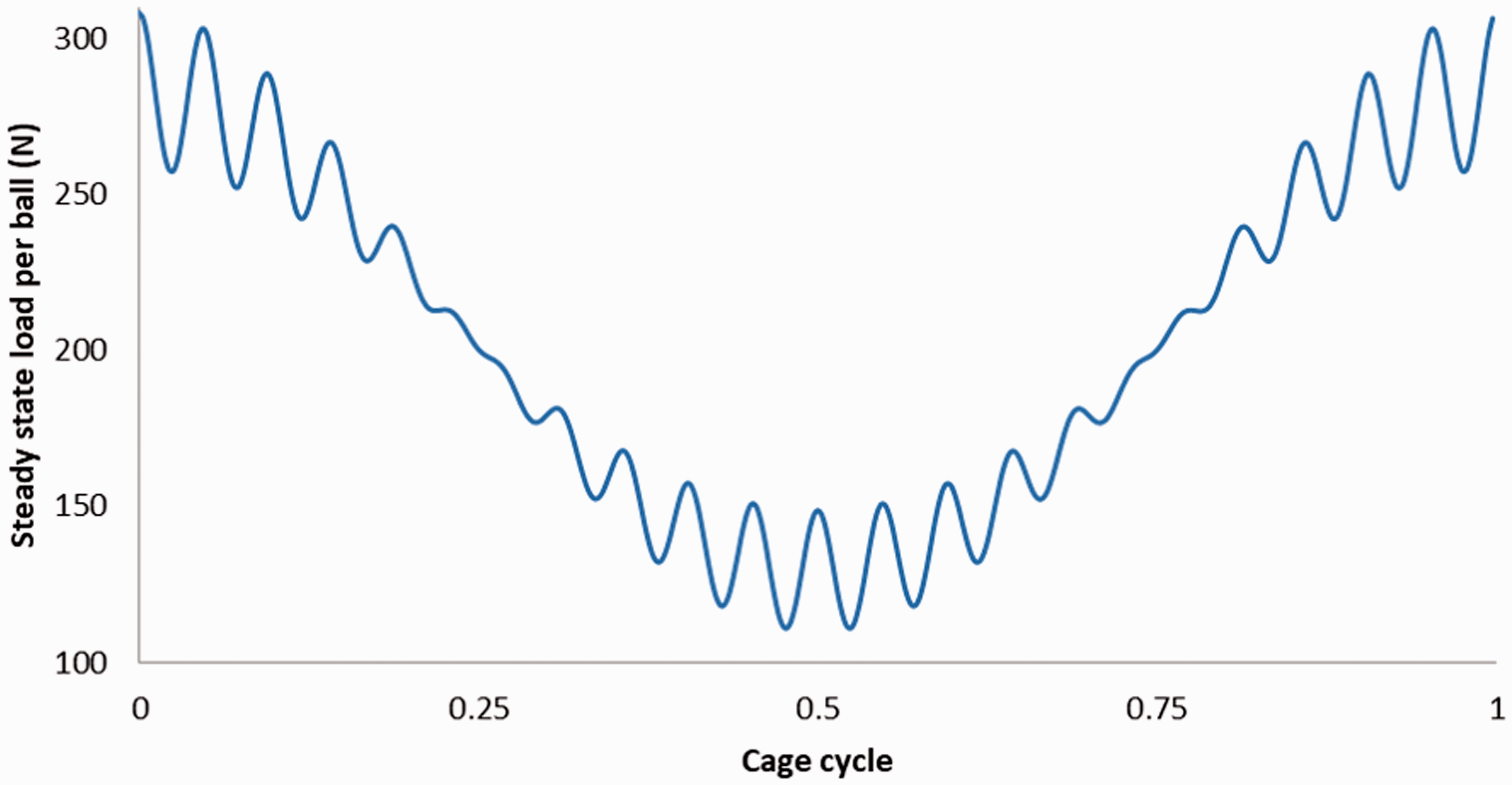
Load per ball-to-races contact in a cage cycle.
The variation of contact load in a typical ball orbital motion results in bearing vibrations as a function of cage rotational speed as shown both analytically and experimentally by Wardle
6
and Lynagh et al.,
7
where:
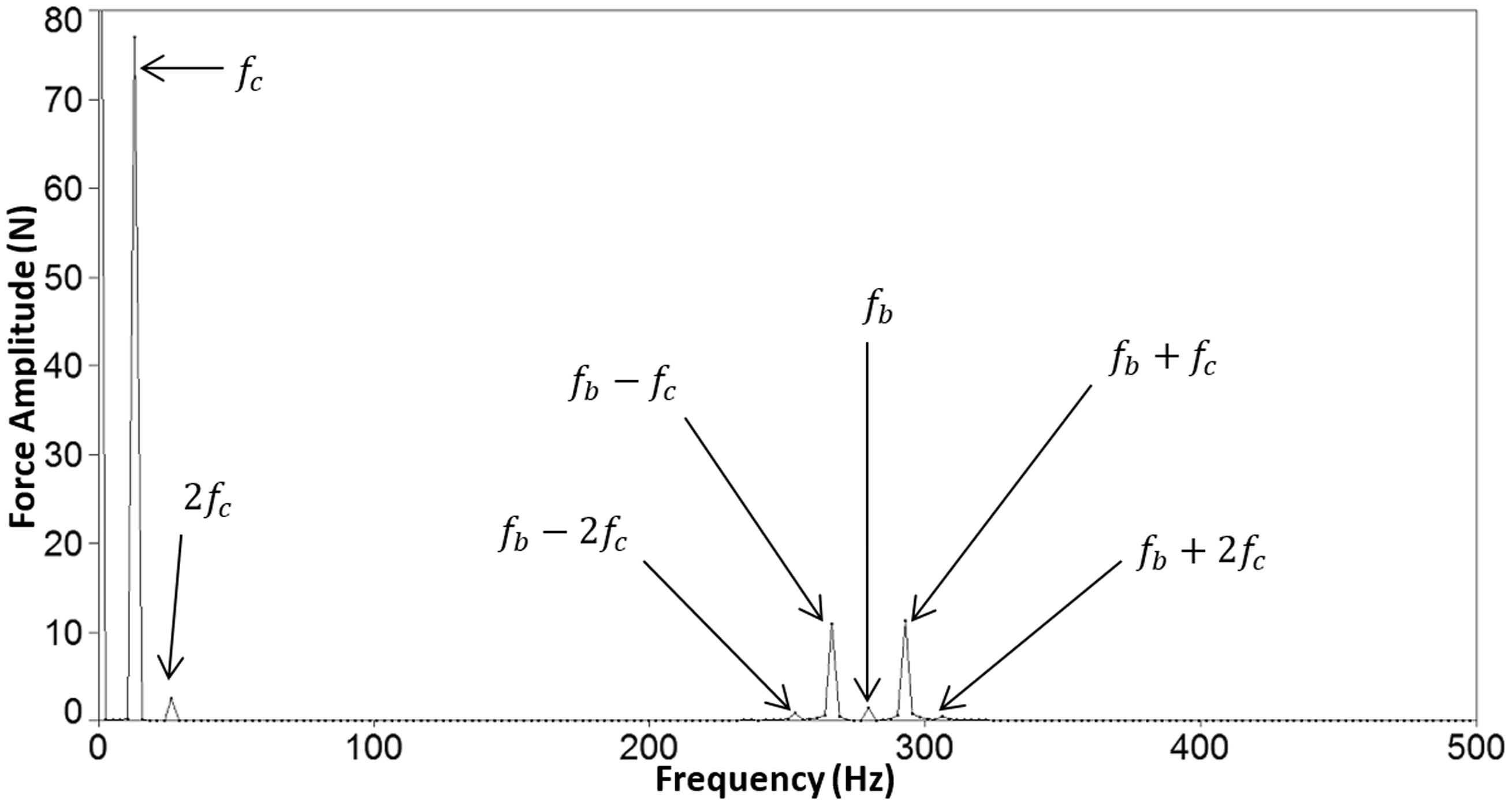
Frequency spectrum of load per ball.
The spectrum of vibration can be obtained through fast Fourier transformation of several cage cycles as shown in Figure 5. The fundamental frequencies of the system occur, including
Applying the balls-to-races contact forces to the elastic outer ring model causes it to deflect around its circumference as demonstrated in Figure 6(a). The localised ring deflection contributes further to the localised contact deflection as indicated in equation (5), which in turn increases the load per ball in each cage cycle in equation (3). In effect, the global modal shape of a flexible outer ring increases the extent of interference fitting and contact loads. Figure 6(b) shows the resulting percentage increase in a typical ball-to-races contact deflection. In effect, the ring elastodynamics represents a form of elastic wave propagation represented as an elastic wavy surface of the outer race.
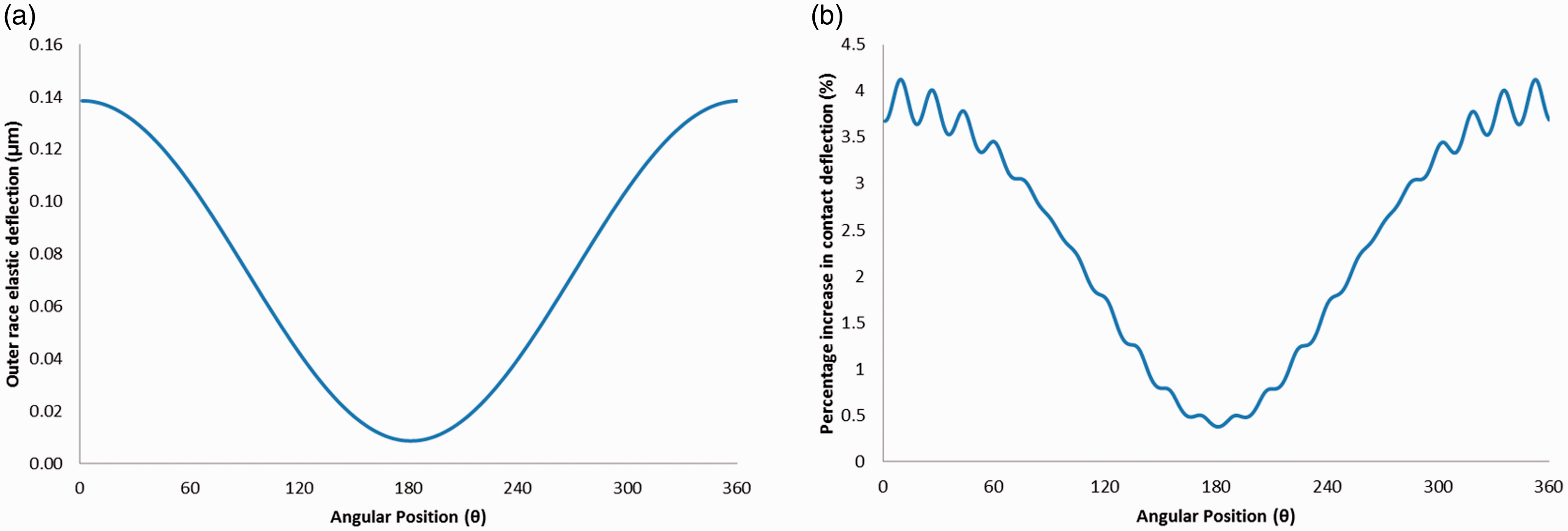
(a) Modal outer elastic ring shape and (b) percentage rise in predicted contact deflection with a flexible outer race.
Figure 7(a) shows an increase in a ball contact load throughout a typical cage cycle. This is due to the in-plane radial deflection of the elastic outer ring. Owing to the contact stiffness non-linearity, the percentage increase in load per ball contact, as the result of ring deformation, can be as much as 6.25% (Figure 7(b)). This increase in contact load can compromise bearing performance through increased contact pressure, friction as well as wear and a rise in sub-surface stresses with the implication of reaching the onset of fatigue.
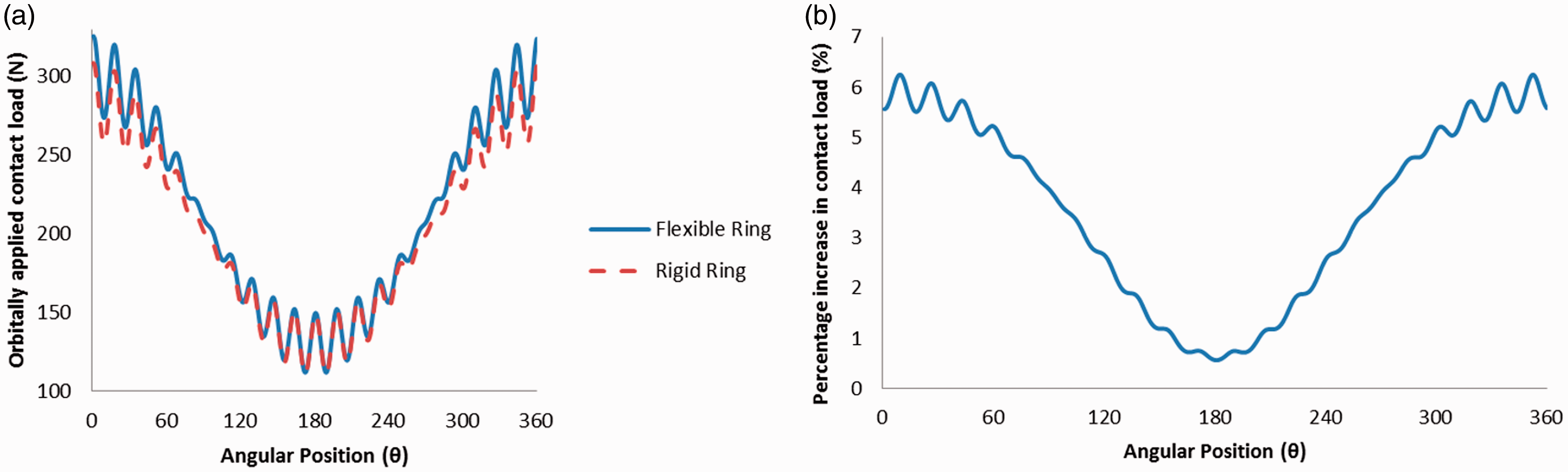
(a) Contact load variation in a cage cycle for rigid and elastic outer races and (b) percentage increase in the predicted ball load in a cage cycle due to an elastic outer race.
Figure 8(a) shows the displacement time history at the beginning of a bearing cycle (where the angular position
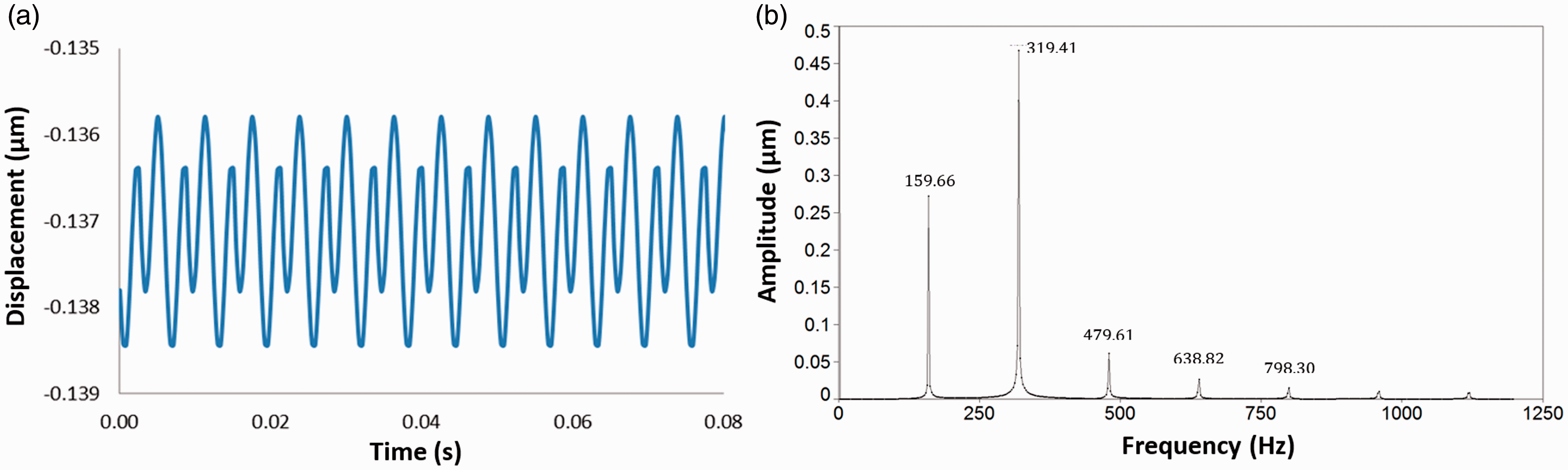
Response at the beginning of the bearing cycle (point
Premature resonance can occur well before any of the system component frequencies reach the rotor speed, as one would usually surmise. This occurs as any structural component would resonate with the ball pass frequency, which is at least an order of magnitude higher than the cage frequency, particularly with any emerging narrow loaded zone created by the deflection of an outer elastic ring, which is often ignored in any analysis. Therefore, an elastic ring behaviour demonstrated in Figure 8 can cause resonance orders of magnitude higher than that at the cage frequency or a given rotor speed (shaft out-of-balance frequency). For the case shown here the ball pass frequency is at 159.66 Hz and its harmonics occur at 319.41 Hz, 479.61 Hz, 638.82 Hz and 798.30 Hz respectively. These are clearly visible in the frequency analysis of the bearing centre displacement time history in Figure 8(b). The dominant frequency in Figure 8(b) is the second order of the ball pass frequency acting at
Figure 9(a) shows the time history of the predicted elastohydrodynamic lubricant film thickness for a ball-race contact in a steady state cage cycle. Any reduction in the film thickness results in an increase in friction, shown in Figure 9(b) with the associated power loss per cage cycle per ball contact shown in Figure 9(c). The total bearing power loss, comprising all the ball-to-races contacts is shown in Figure 9(d). This shows that an elastic outer ring increases the bearing power loss by approximately 4% (in the studied case). The fluctuations in bearing power loss, observed in Figure 9(d), is an additional source of vibration in any rotor-bearing system. Additionally, bearing reliability is of paramount importance. Any increased contact pressures and shear can lead to increased sub-surface stresses with increased chance of inelastic deformation.
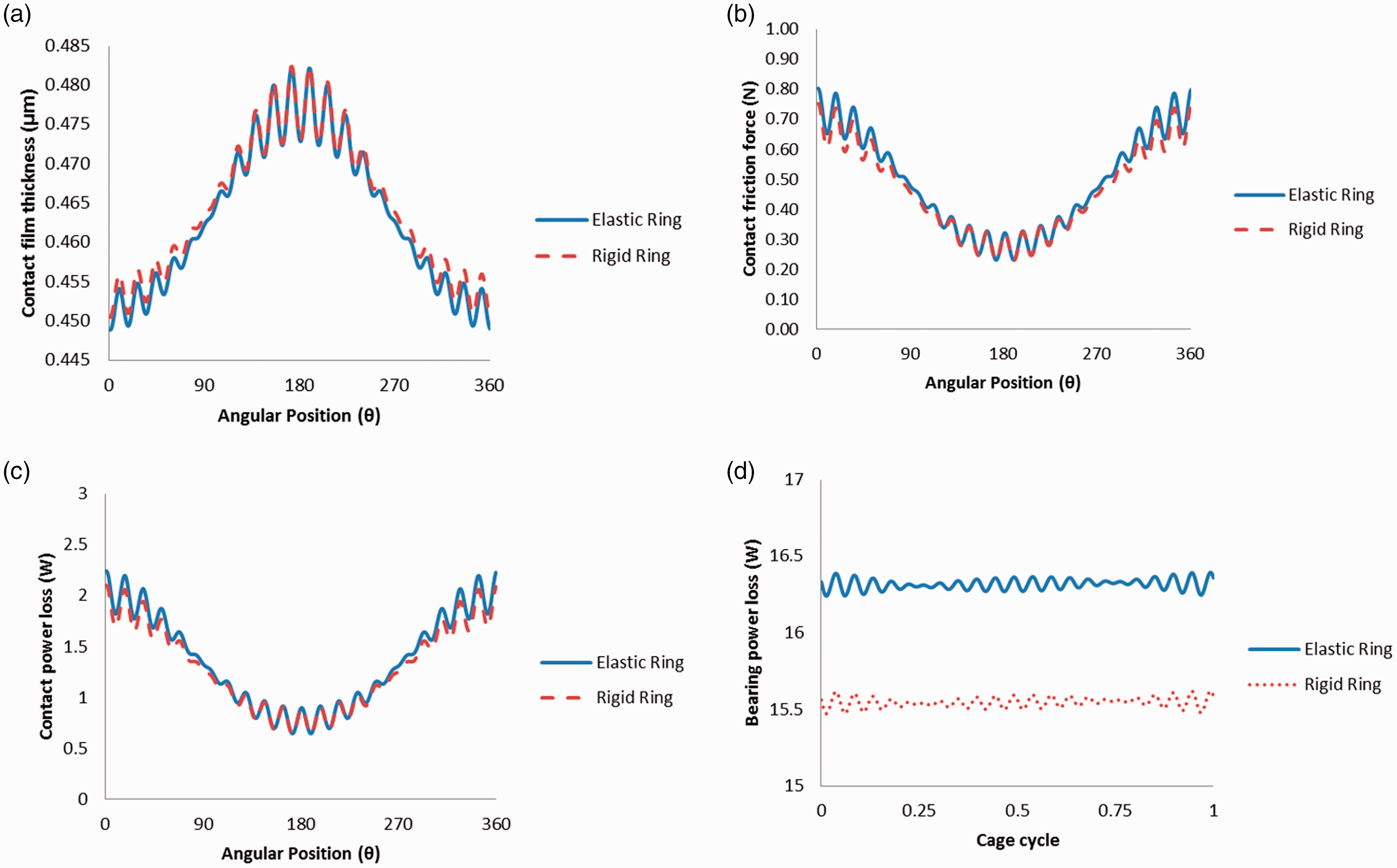
Rolling element variation in (a) lubricant film thickness, (b) friction loss, (c) power loss and (d) total bearing power loss.
There have been numerous studies into the fundamental mechanisms, affecting life of bearings. These include the distortion energy hypothesis known as the von Mises criterion, as well as he maximum shear stress hypothesis, known as the Tresca criterion. Broszeit and Zwirlein
60
and others2,39,61 have shown that the alternating shear stress hypothesis should be used to predict the ultimate useful life of a bearing. The equivalent stress 
Figure 10 shows the sub-surface orthogonal reversing shear stresses
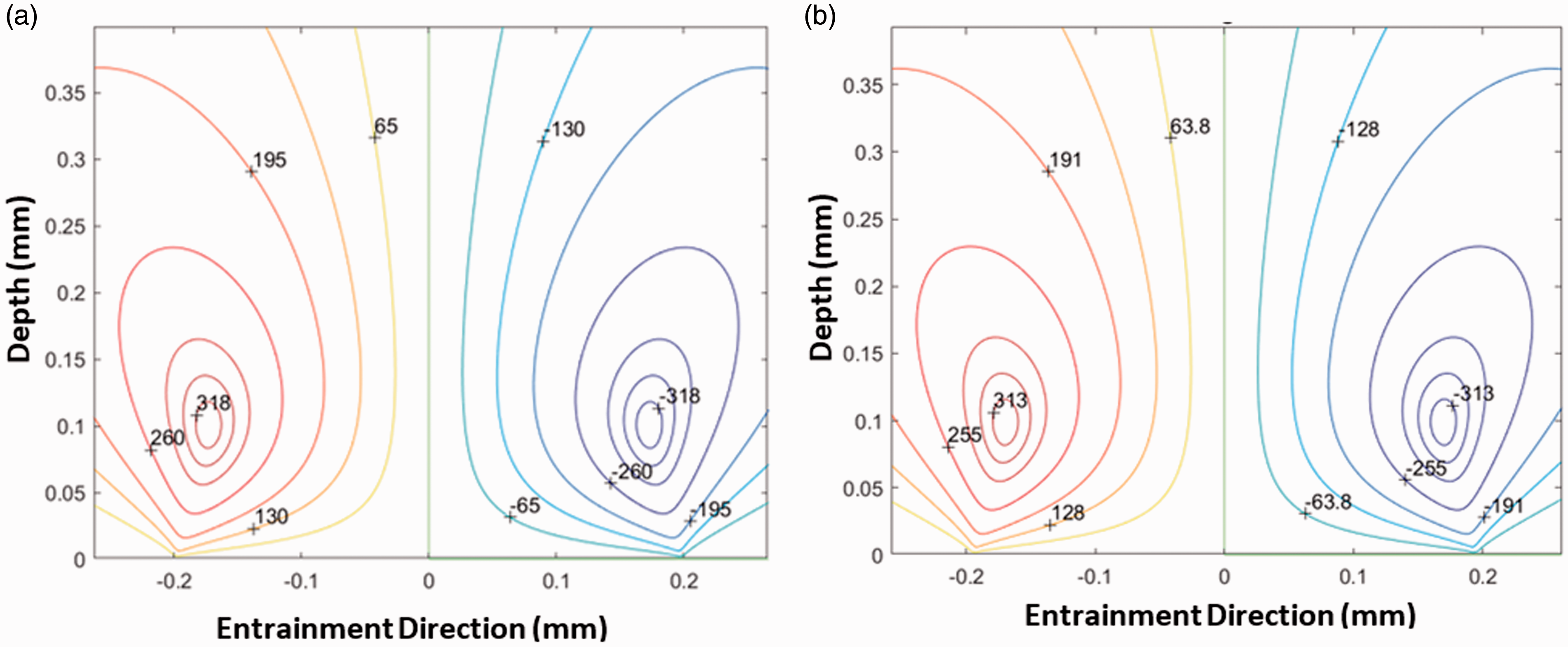
Orthogonal reversing shear stress (MPa) distribution for an (a) elastic ring and (b) rigid ring.
The lifetime power loss for the bearing can be predicted based on the usual assumption of 10% bearing failures due to fatigue after 2 million cycles and approximately 50% failure after 10 million cycles. 39 These are shown for the cases of an assumed rigid as well as the more realistic flexible outer race in Figure 11. The results are obtained by evaluating the lubricant viscosity at an assumed operational temperature of 60 °C. The results indicate that the cumulative effect of ring elasticity over a large number of cycles is marginal, but not insignificant (4% increase in power loss per bearing cycle), considering the ubiquitous nature of bearings in all forms of rotating machinery. However, such a relatively small difference in the predictions for one cycle can result in considerable differences in the prediction of the consumed lifetime power by the bearing. For instance, based on the results in Figure 11, the difference for a bearing during a nominal lifespan of 10 million cycles, which is expected for 50% of all bearings, can accumulate to approximately 0.16 kWh rotating at a cage speed of 13.3 Hz. The associated power loss would significantly increase in high speed applications.
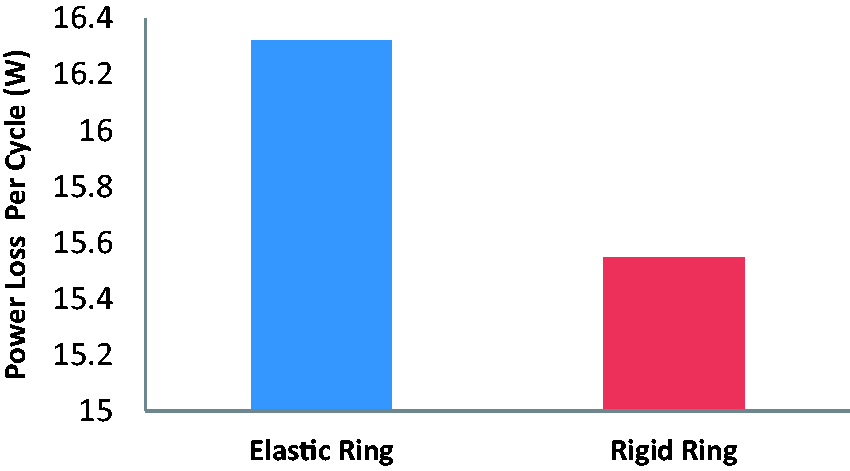
Bearing power loss for a single cycle.
Optimisation of the elastic ring can improve the system efficiency in applications where the bearing weight is negligible such as in fixed rotating machinery. The outer race or housing can be optimised to reduce the losses associated with their flexibility. In applications where the machine is not fixed, such as the automotive industry, both the bearing weight and the power loss due to the flexible ring should be optimised in concert.
Important geometrical design parameters for the bearing outer race are its outer diameter
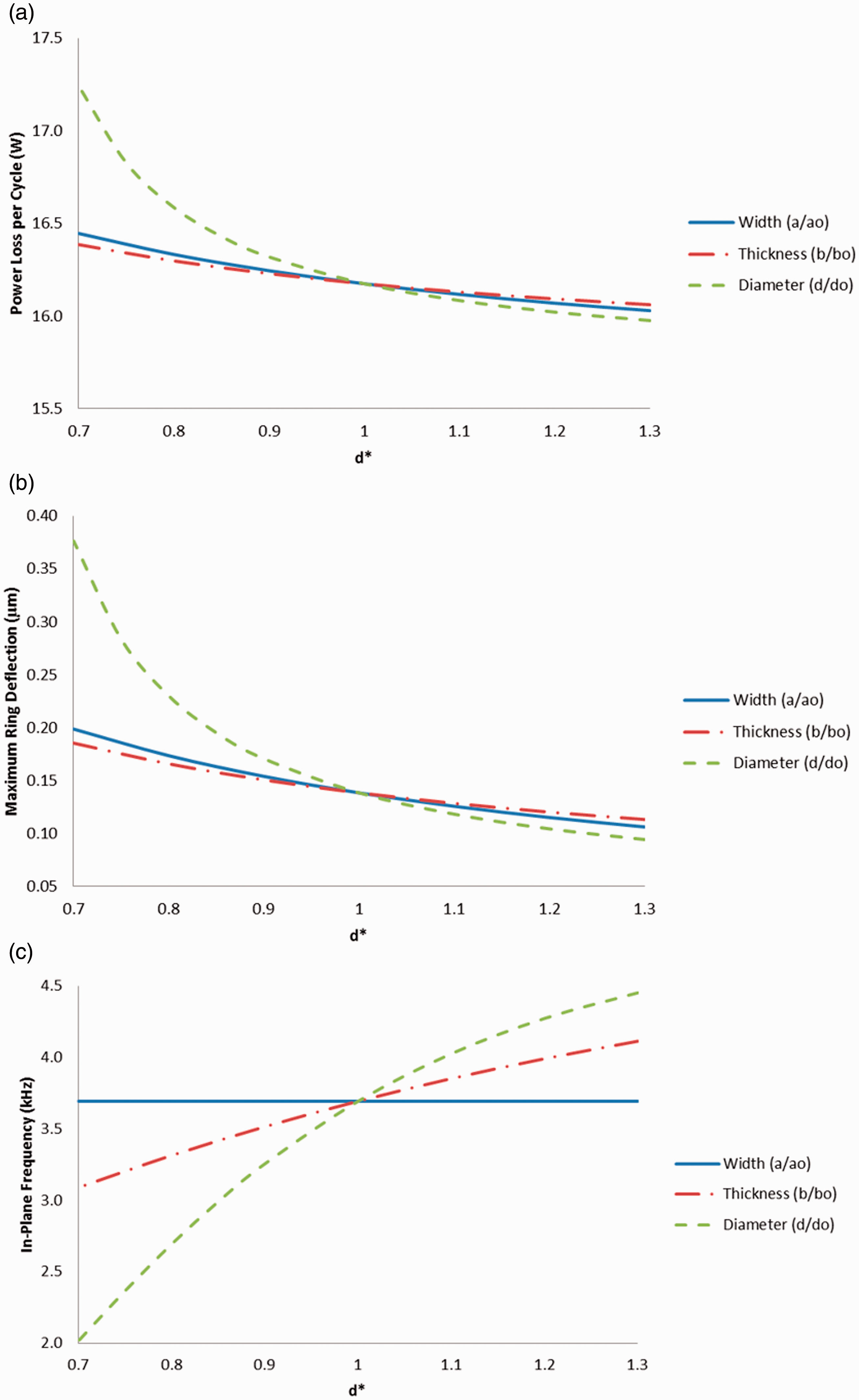
Dimensionless design parameter analysis: The effect of geometric properties on tric properties on (a) power loss per cycle (b) maximum deformation and (c) in-plane frequency of the ring.
Figure 12 shows the effect of geometric parameters of the outer race power loss per cycle (a), deformation (b) and its in-plane frequency response (c) of the radial deep groove ball bearing. Optimisation of the outer ring allows the total power loss per cycle to be reduced by 1.25%, which subsequently reduces the running energy costs and the corresponding carbon emissions. It is important to note that in certain applications, the additional weight may compromise the predicted energy savings. The results also show that the maximum deflection, hence the generated wavy surface of the elastic ring can be altered to change the bearing response and increase the useful working life of the bearing. It is important to note that although the rings deflection can be minimised through an increase in its diameter, width and thickness, both its deflection and the wavy structural response is still evident. It is also important to note that for high performance applications reductions in the diameter, width and thickness may cause significant increases in the ring deflection.
To avoid a compromise in performance it is important to ensure that the bearing outer ring resonant frequencies do not coincide with the bearing operational frequencies. For the case of the bearing in Table 2, a moderately packed ball complement arrangement comprises 12 balls and for a tightly packed arrangement there are 14 balls. Therefore, the tightly packed arrangement can excite the resonance frequency of the bearing at lower operational frequencies than the moderately packed one. The bearing outer race needs to be designed so that its operational structural modal frequencies are outside any system excitation frequency. The excitation frequency is primarily provided by the shaft rotation frequency, but other source of vibration can excite the structure as well, such as multiples of cage frequency and surface waviness of the bearing outer race. Figure 12(c) demonstrates the effect of different geometric properties on the outer ring resonant frequencies. It can be seen that the radius has the most effect compared with its thickness. The ring width does not affect the in-plane frequency response of the structure. Unfortunately, the shift in frequency response is associated with a shift in bearing outer race ring deflection as demonstrated in Figure 12(b). Therefore, it is important that these two design factors are considered together in an integrated approach. Ring width is an important geometric parameter in that it has no effect on the structural resonance frequency, but it can be used to reduce the maximum deflection and power loss due to the outer flexibility.
It is noteworthy that in certain applications the radial bearing can also accommodate an axial load. Furthermore, thrust bearings mainly support axial loads but can also accommodate for radial loads. In applications where the radial load is accompanied by axial loading it is important that the out-of-plane ring frequency is also considered.
Concluding remarks
The total power consumption per revolution is shown to increase when the flexibility of bearing rings or housing is taken into account (approximately 4% for the case studied under isothermal conditions). Therefore, the predicted power loss in motors, rotors and gearboxes where bearings are used in abundance increase with realistic bearing models such as the one presented in this study. The study also shows that flexibility of the ring enables optimisation of bearing performance through selection of appropriate geometrical parameters. A geometric investigation has shown that the losses induced by an elastic outer ring can be reduced by up to 1.25%. This can provide significant power savings through the lifetime of systems, especially with the abundance of bearings in almost 95% of all machines and mechanisms.
Flexible ring dynamics causes surface waviness of the bearing raceway through global elastic wave propagation. This has not hitherto taken into account in the rollers-to-raceway contact dynamics, all of which have generally considered that the contacts are only localised, subject to Hertzian deflection. Furthermore, the elastodynamic behaviour of the ring reduces the elastohydrodynamic film thickness which in turn affects a number of fundamental ball bearing performance attributes such as, contact friction, wear, fatigue behaviour, vibration, noise and inefficiency. The ball bearing model could be expanded to include thermal effects of the lubricant using for example an analytical thermal network model. Inclusion of contact damping as well as structural damping of the flexible bearing rings would also improve the practicality of the methodology. However, it should be noted that under elastohydrodynamic regime of lubrication with an adequately interference fitted/preloaded bearing, damping due to lubricant action has been shown to be insignificant.64,65 The main source of contact damping would be due to material hysteresis in localised deformation. 66
Supplemental Material
sj-pdf-1-pik-10.1177_1464419320951398 - Supplemental material for The effect of outer ring elastodynamics on vibration and power loss of radial ball bearings
Supplemental material, sj-pdf-1-pik-10.1177_1464419320951398 for The effect of outer ring elastodynamics on vibration and power loss of radial ball bearings by R Turnbull, R Rahmani and H Rahnejat in Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors gratefully acknowledge the financial support of the Engineering and Physical Sciences Research Council (EPSRC) under the Centre for Doctoral Training in Embedded Intelligence; grant reference EP/L014998/1 as well as AVL List GmbH.
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.