
Abstract
To address the difficulty of suppressing low-frequency line spectra in underwater vehicle radiated noise and the narrow operating bandwidth of conventional linear vibration absorbers with fixed tuning frequencies, this paper proposes a flexible hinge-type nonlinear energy sink (NES). First, a double-slotted flexible hinge-type NES structure is presented. Static mechanical analysis shows that the structure exhibits cubic stiffness characteristics near the static equilibrium position. Second, the IHB method is employed to characterize the periodic responses of the NES system. The effects of NES mass, stiffness, and damping on the amplitude-frequency response and vibration suppression performance are then investigated in detail. Subsequently, local optimization is performed to determine the optimal damping and stiffness parameters of the NES. The optimized NES shows strong robustness against variations in excitation frequency and amplitude. Finally, a prototype of the flexible hinge-type NES is fabricated, and a vibration test platform is established for experimental validation. Both simulation and experimental results show that the NES reduces the first-order resonance peak near 5.00 Hz by approximately 8.17 dB, decreases the average line-spectrum level over 4.43–5.82 Hz by about 3.74 dB, and broadens the vibration absorption bandwidth by approximately 27.8%. Compared with an equivalent linear dynamic vibration absorber, the NES provides better broadband vibration absorption performance. In addition, the NES can shift the resonance frequency of the coupled system and induce a strong modulation response.
Keywords
1. Introduction
The low-frequency line spectra in the underwater radiated noise of ships are highly concentrated and can serve as acoustic fingerprints unique to individual vessels. These line spectra are key signatures used by modern passive sonar systems for target detection, tracking, and identification. Dynamic vibration absorbers are commonly used to suppress low-frequency line spectra. Dynamic vibration absorbers are widely used in ship hydraulic pumps, auxiliary cooling pumps, and floating isolation mats. These devices are typically designed based on linear theory and are effective mainly for suppressing a single stable line spectrum. However, they suffer from fixed tuning frequencies and narrow operating bandwidths. When the excitation frequency deviates from the absorber’s natural frequency, the suppression performance deteriorates significantly and may even amplify the vibration. Moreover, once the component parameters of a linear vibration absorber, such as mass, damping, and spring stiffness, are fixed, they are difficult to adjust, resulting in poor robustness under varying external excitations and limited adaptability to changing operating conditions of marine machinery.
By introducing nonlinear elements into dynamic vibration absorbers, nonlinear absorbers can be constructed that adaptively adjust the resonance frequency and broaden the absorption bandwidth without introducing new resonance peaks. Although the mechanisms used to realize nonlinear restoring forces vary, these nonlinear absorbers can generally be categorized as nonlinear energy sink (NES).1,2 NES can transfer energy from the primary structure in a predominantly irreversible manner and dissipate it through damping in the attachment. 3 This phenomenon, known as targeted energy transfer, is the core mechanism underlying vibration suppression by an NES and constitutes its essential distinction from linear vibration absorbers. In addition, because an NES does not possess a linearized natural frequency, it can shift the resonance characteristics of the coupled system over a broad frequency range. As a result, high energy absorption and dissipation efficiency can be achieved over a wide frequency range. 4 This feature makes NESs promising for suppressing low-frequency line spectra under varying excitation conditions in marine machinery.
Extensive studies have been conducted on the vibration-reduction mechanisms, structural design, and engineering applications of NES. 5 Regarding vibration-reduction mechanisms, Lee et al. investigated the dynamics of a two-degree-of-freedom vibration-absorption system coupled with an ideal cubic-stiffness NES. They used the non-stationary transformation method to analyze the nonlinear modes of the undamped Hamiltonian system and presented a frequency-energy diagram, which represents the backbone curves and bifurcation phenomena of different periodic solutions. They pointed out that internal resonances, such as 1:1, 1:3, or even any frequency ratio, can occur between the two oscillators, and they also discovered that transient resonance capture can lead to localized vibration energy in the system. 6 Starosvetsky et al. employed the complex-variable averaging method and phase trajectory method to perform rigorous mathematical analysis on the equilibrium point types and bifurcation phenomena of the NES system. They indicated that, depending on the excitation amplitude, the system could exhibit three distinct responses: steady-state response, weak modulation, and strong modulation. 7 When energy transfer phenomena occur in the system, it corresponds to a strong modulation response mechanism, which was further used to suppress the limit cycle motion of the Van der Pol oscillator.8,9 Alexander et al. used numerical continuation to identify a ring-shaped isolated branch in the amplitude-frequency response of the NES system. When the system response lies within the main resonance branch at high frequencies, the NES attenuates the vibration amplitude of the primary structure. However, when the system is on the solitary branch response at low frequencies, it does not exhibit vibration absorption performance. They also noted that when the isolated branch coexists with the main resonance response over a broad parameter range, the NES cannot outperform a linear vibration absorber. 10 In terms of structural design, Shudeifat et al. designed a NES structure using two slanted linear springs that simultaneously provide cubic stiffness and linear negative stiffness. The shock isolation efficiency of this structure can reach up to 99%. 11 In another study, Al-Shudeifat and co-workers designed an NES based on two pairs of asymmetrically arranged ring-shaped permanent magnets, which also showed excellent vibration suppression performance. 12 Lamarque et al. designed a bilateral collision oscillator with a non-smooth potential to suppress the vibration of a variable-mass single-degree-of-freedom primary structure. They used the multi-scale method to analyze the steady-state equilibrium points and bifurcation properties of the system. 13 Yao et al. designed a cubic stiffness NES structure by paralleling permanent magnets with coil springs, which was used to suppress the eccentric motion of a rotor. 14 In terms of engineering applications, Viguie et al. demonstrated the effectiveness of the NES in damping torsional vibrations of oil drilling columns, thereby enhancing the stability of the system. 15 Ahmadabadi and colleagues further validated through numerical calculations that this structure could suppress most of the limit cycle oscillations. 16 Yang et al. considered the vibration response of a cantilevered fluid-carrying pipeline with an added NES structure at both ends and provided the critical flow velocity at which the NES exhibits wide-frequency performance. 17 Mamaghani et al. further studied the vibration reduction effect of the NES on the above structure under harmonic excitation conditions. 18 The U.S. Air Force Research Laboratory, in collaboration with scholars from the University of Illinois at Urbana-Champaign, conducted research on the vibration control of large aircraft wing flutter using NES technology. 19 This technology was successfully applied in engineering practice, solving the issue of aerodynamic instability and limit cycle oscillations in two-dimensional rigid wings under subsonic conditions. 20 Recent advances in the dynamic characterization and control of nonlinear systems have provided an important theoretical foundation for vibration suppression technologies. For instance, Wang et al.21,22 conducted extensive studies on the dynamic characteristics of Duffing-Holmes systems with nonlinear damping under harmonic excitation, revealing complex bifurcation behaviors and stability boundaries that are critical to understanding nonlinear energy dissipation mechanisms. Furthermore, in the field of active and semi-active control, Wang et al.23,24 investigated the dynamic characteristics and stability of electromagnetic SD-oscillator isolation systems under state-feedback control while explicitly accounting for the nonlinear characteristics of electromagnetic forces. These studies highlight the importance of accurately modeling nonlinear stiffness and damping and of employing robust analytical methods to predict system responses under various excitation conditions.
NES, a class of energy-dissipating vibration mitigation devices characterized by inherent stiffness nonlinearity, have attracted considerable attention in civil, aerospace, and mechanical engineering because of their light weight, simple structure, robustness, and broad absorption bandwidth. 25 However, most existing NES configurations are laterally arranged with respect to the primary system, which may introduce large frictional damping and pronounced gravitational effects of the attached mass. Furthermore, the application of NES technology to ship vibration and noise reduction remains limited.26–29 Meanwhile, existing cubic-stiffness NES configurations, such as magnetic, inclined-spring, and buckled-beam types, still exhibit significant limitations under the complex operating conditions associated with controlling low-frequency line spectra in marine machinery and equipment: magnetic NESs are susceptible to environmental magnetic-field interference, permanent magnets are prone to demagnetization, and activation typically requires a high excitation threshold; inclined-spring NESs rely on installation geometry to realize nonlinear stiffness, resulting in dispersed layouts and pronounced gravitational effects, which make them difficult to accommodate within the compact installation space of marine equipment; and traditional buckled-beam NESs lack a design that prevents permanent buckling, which can lead to plastic deformation under large-amplitude vibrations. In addition, their stiffness is not readily adjustable and they lack a gravity-compensation mechanism, causing the operating point to deviate easily from the static equilibrium position. In addition, most of the aforementioned configurations adopt laterally coupled designs, lack vertical load-bearing capacity, and exhibit relatively high friction damping, making them difficult to match the vibration characteristics and operating requirements of marine equipment. To address these issues, this paper proposes a novel dual-slotted flexible hinge-type nonlinear energy sink. The dual-slotted structural design effectively prevents permanent buckling deformation caused by large-amplitude vibrations, thereby significantly enhancing the operational stability and service life of the device. In addition, it integrates a preload-adjustment mechanism and a helical-spring height-adjustment mechanism, enabling precise control of nonlinear stiffness and efficient gravity compensation for different added masses and thereby overcoming the traditional difficulties of cumbersome parameter tuning and operating-point drift. The design combines structural compactness with adjustability, thereby preserving the cubic-stiffness characteristics and the efficiency of targeted energy transfer. In engineering applications, it is compatible with the vertical vibration characteristics and compact installation requirements of marine equipment, offering improved robustness and practicality. This design provides a more practical engineering solution for the broadband and efficient control of low-frequency line spectra in marine machinery and equipment.
Therefore, there is a need for an NES with adjustable stiffness, a compact structure, and adequate vertical load-bearing capacity. In this context, this paper proposes a dual-grooved flexible hinge-type cubic-stiffness NES based on the parallel combination of positive and negative stiffness. This paper investigates the vibration suppression performance of the NES under harmonic excitation and optimizes its parameters using a local optimization algorithm. Frequency-sweep and fixed-frequency experiments are conducted to verify the vibration suppression performance of the NES over a broad frequency range. The goal is to achieve broadband suppression of low-frequency line spectra and to overcome the performance limitations of linear vibration absorbers used in ship applications.
2. Static mechanical analysis of the flexible hinge and design of the corresponding nonlinear energy sink structure
2.1. Static mechanical characteristics analysis of a single flexible hinge
The loading and deformation of a single flexible hinge are illustrated in Figure 1. The middle section can be considered as a rigid beam, while the grooved sections at both ends can be viewed as elastic beams. The elastic beams undergo buckling deformation under the axial preload F
X
and longitudinal load F
Y
, with its static characteristics are governed by the bending deformation of the elastic beam, the load-transfer behavior of the rigid beam, and the regulating effect of the preload. Force and deformation diagram of a single flexible hinge.
This subsection derives an analytical expression for the longitudinal stiffness by mechanically modeling the buckling deformation process of the flexible hinges (see the Appendix for the detailed derivation) and simplifies the stiffness characteristics by means of a Taylor-series expansion. The results show that the longitudinal restoring force of a single flexible hinge is strongly linearly correlated with the preload. When the stiffness expression is expanded in a Taylor series about the static equilibrium position (y = 0), retaining only the first two terms is sufficient to satisfy engineering accuracy requirements.
Further analysis of the axial deformation of the elastic beam reveals that it consists of both motion-induced deformation and compressive deformation. After the axial-deformation expression is expanded in a Taylor series about the static equilibrium position and the first three terms are retained, the higher-order coefficients (A 4 , A 5 , and A 6 ) can be neglected in comparison with the third-order coefficient A 3 . Therefore, the axial deformation of the flexible hinge can be regarded as being dominated by the third-order term, which constitutes the fundamental physical basis for realizing cubic nonlinear stiffness in the subsequent flexible hinge-type NES.
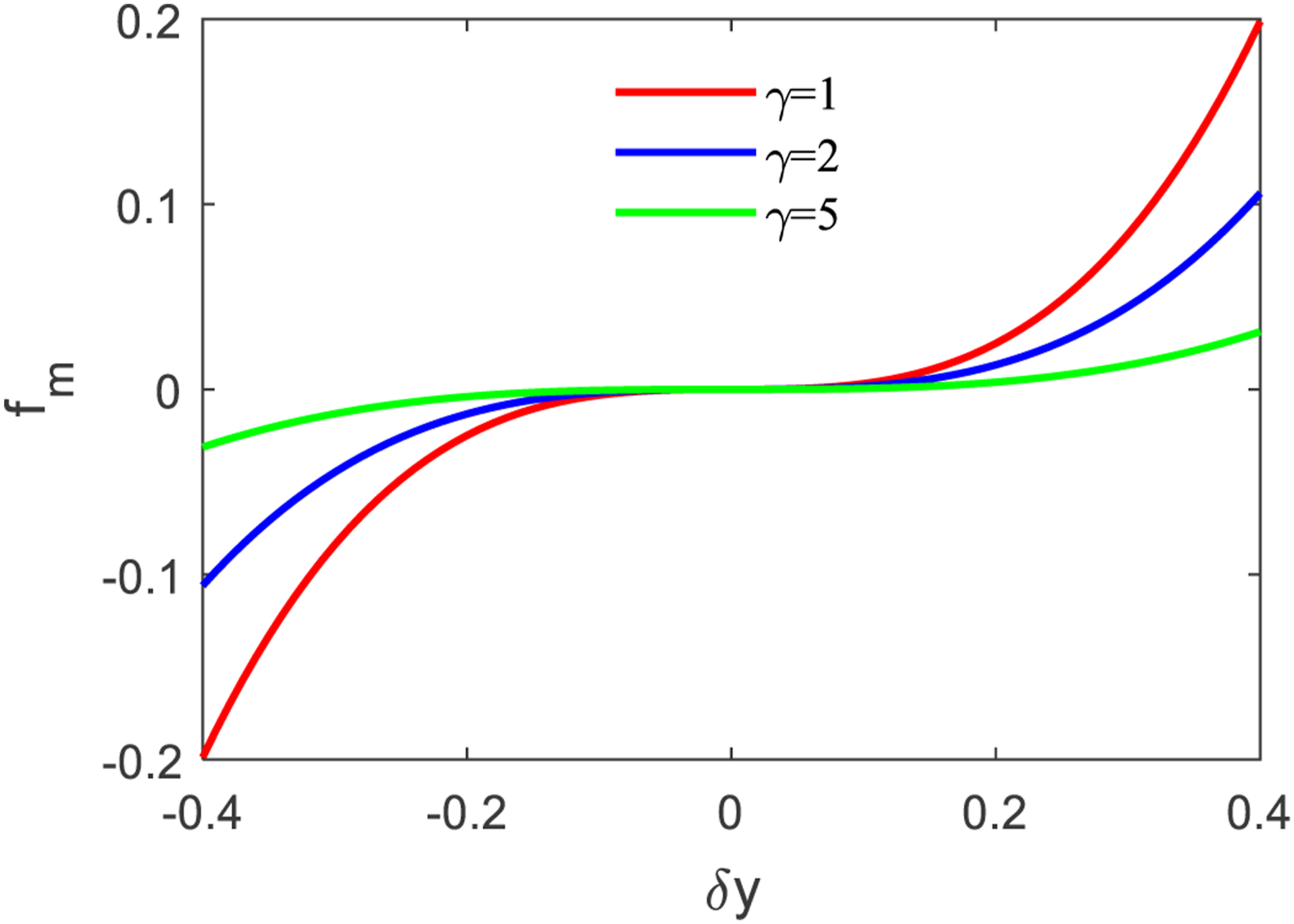
The shape coefficient γ (the length ratio of the rigid beam to the elastic beam) is a key structural parameter affecting the stiffness characteristics of the flexible hinge. Analysis of the relationship between the coefficients of each order and the shape coefficient shows that γ directly determines the magnitude of the third-order coefficient A 3 , thereby governing the strength of the nonlinear stiffness of the flexible hinge and providing an important parametric basis for the future design and optimization of the cubic stiffness of the nonlinear energy sink.
2.2. Overall static mechanical characteristics analysis of the structure
Flexible hinges are generally used in pairs in the present design. Under the action of the preload adjustment mechanism, the preload applied to the right end of the flexible hinge can be expressed as:



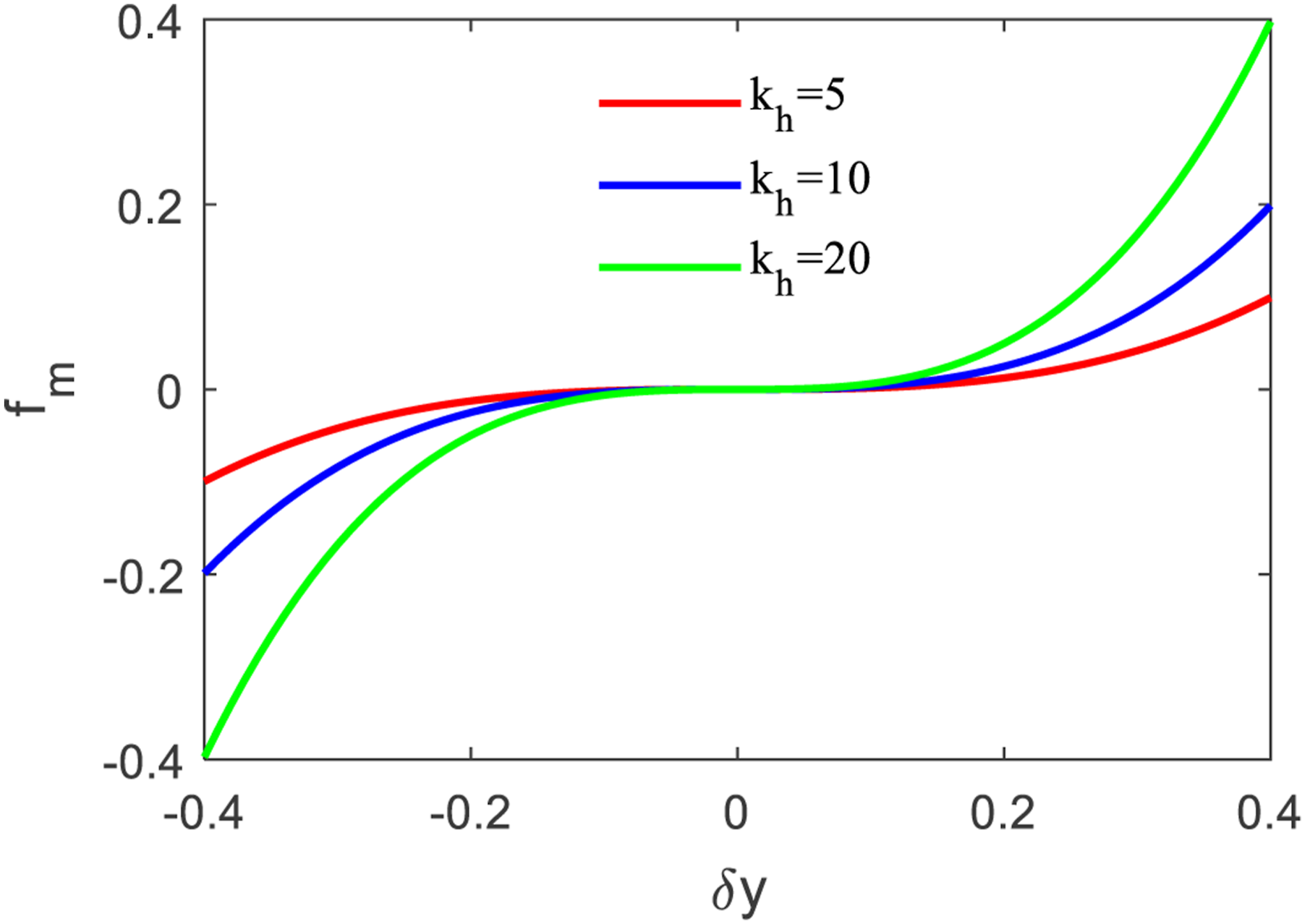
For the parameters Relationship curve between longitudinal restoring force and displacement. Influence of preload adjustment spring stiffness on the cubic stiffness characteristics of the nonlinear energy sink. Influence of flexible hinge shape factor on the cubic stiffness characteristics of the nonlinear energy sink.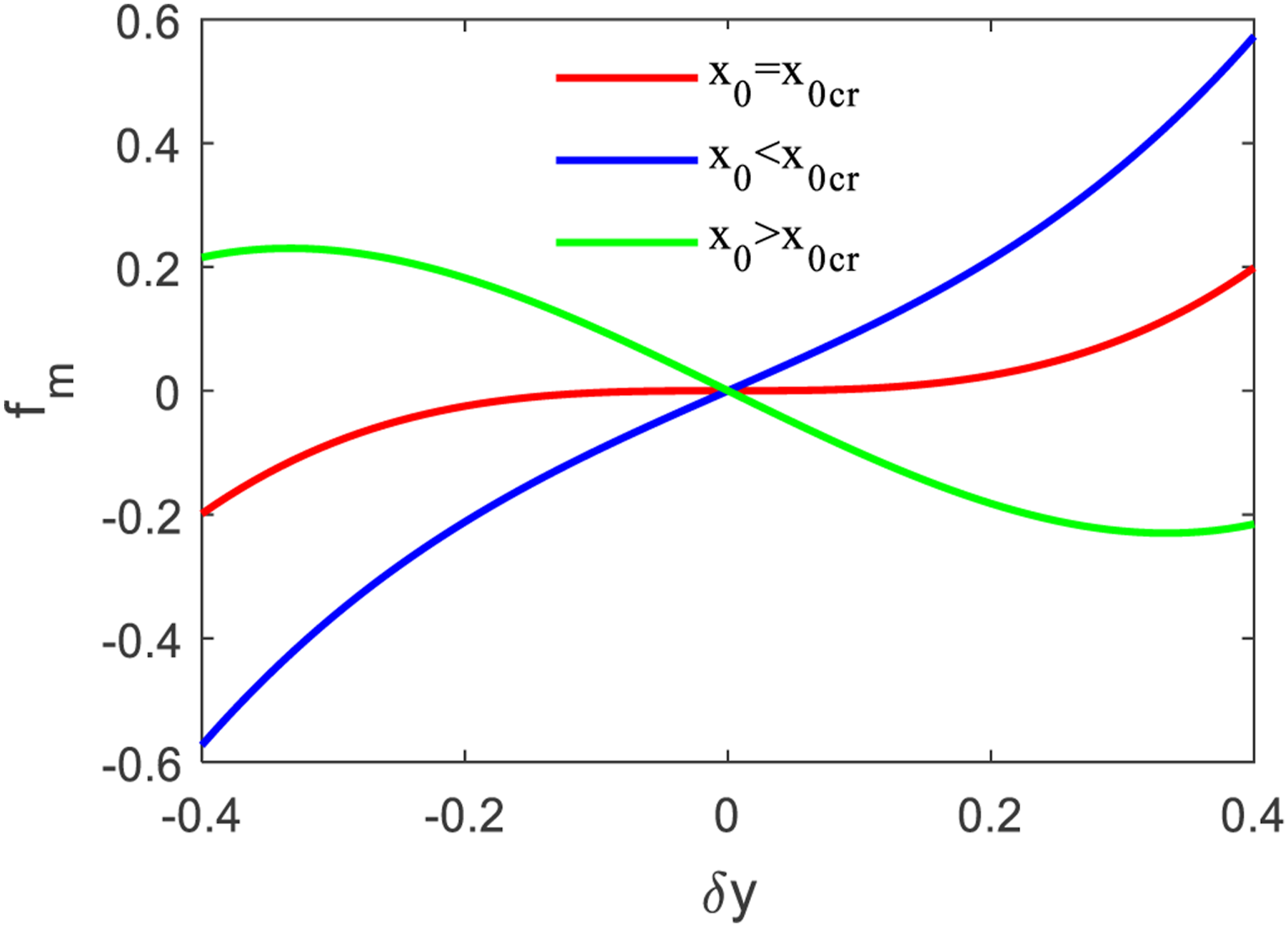
2.3. Structural design of the flexible hinge-type nonlinear energy sink
He structural design of the flexible hinge-type NES is shown in Figure 5. In this configuration, the symmetrically distributed flexible hinges are arranged in parallel with vertical helical springs. A preload is applied at both ends of the flexible hinge, while the additional NES mass is attached at its center. The structure includes two adjustment mechanisms: a preload adjustment mechanism and a helical-spring height adjustment mechanism. The former is used to tune the stiffness characteristics of the flexible hinge under buckling, whereas the latter compensates for the weight of different attached masses so that the NES structure remains close to its static equilibrium position. In addition, the flexible hinge adopts a double-groove design and can be divided into rigid-beam and flexible-beam segments. The main purpose of this design is to prevent permanent buckling deformation caused by impacts or large-amplitude vibrations, thereby improving the operational stability and service life of the NES. Schematic of flexible hinge-type nonlinear energy sink structure.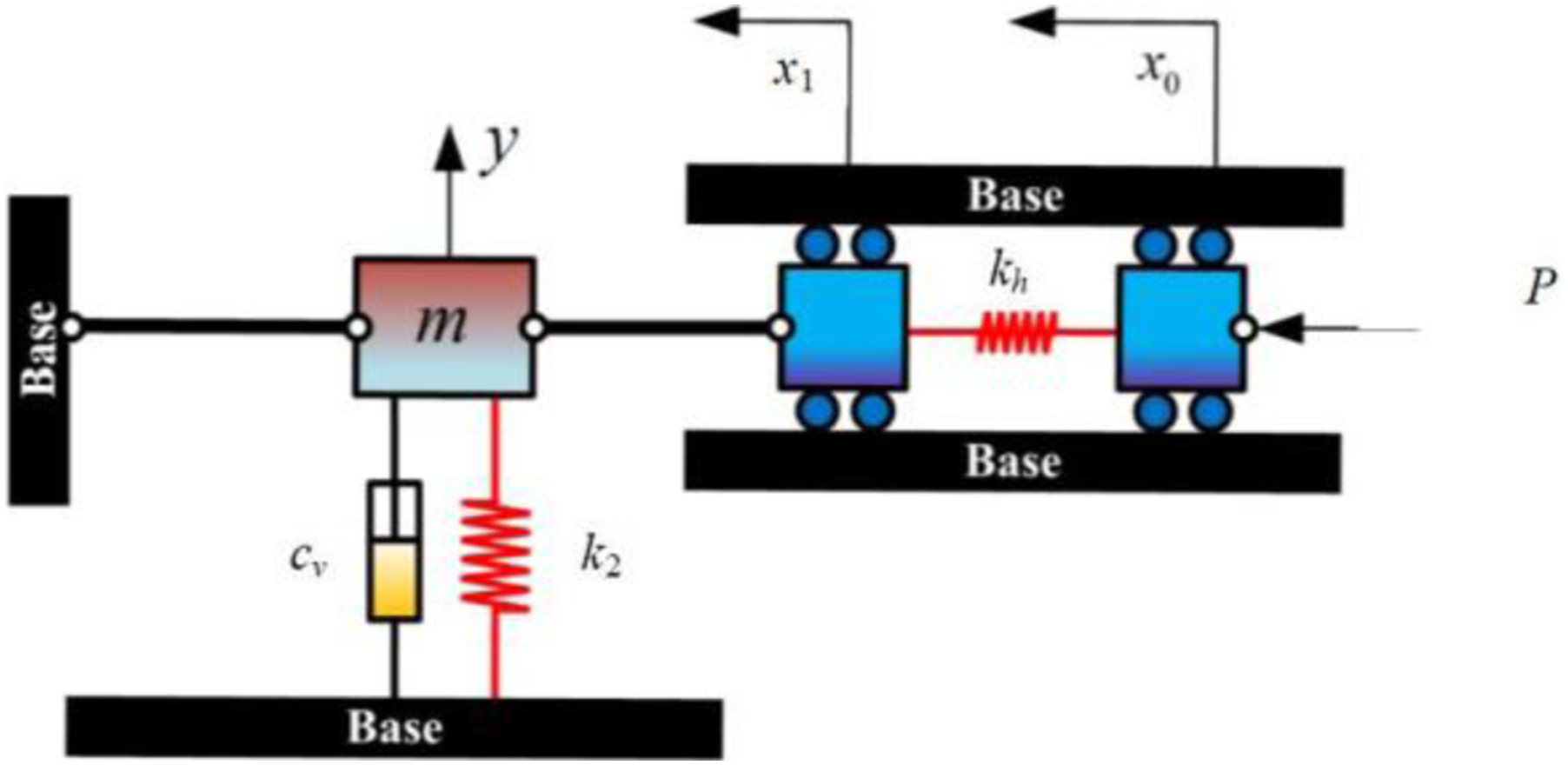
Figure 6 shows the configuration of the primary system coupled with the NES. The NES consists of a pair of rigid-link hinges and an internal mass Schematic diagram of the vibration absorption system with coupled nonlinear energy sink.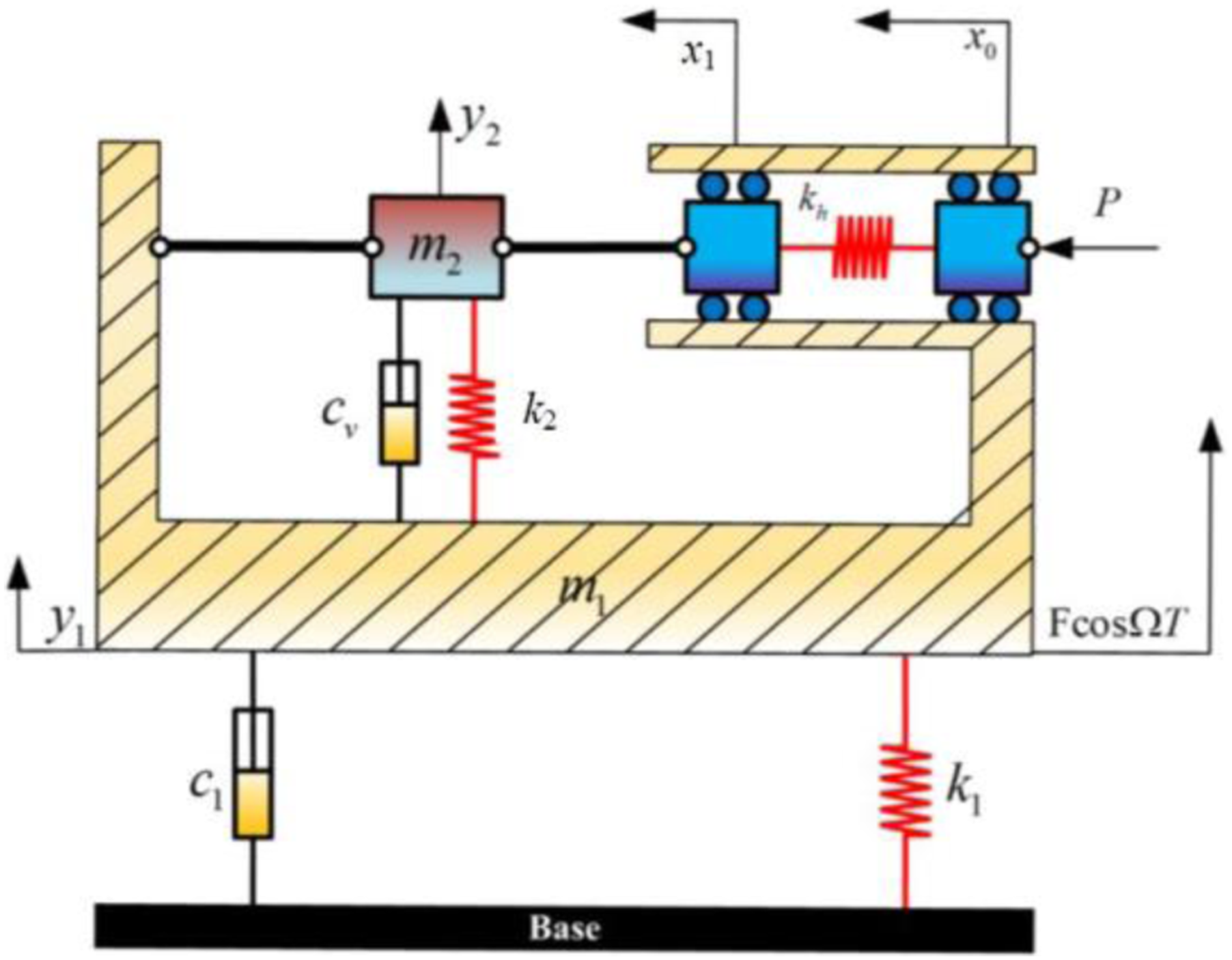
The equations of motion of the coupled NES system are written as follows:

The NES is attached to the primary system, which consists of mass

Substituting Eq. (5) into the governing equations yields:

3. Dynamic characteristics analysis of the flexible hinge-type nonlinear energy sink system
3.1. Calculation method for the periodic solution of the system
The Incremental Harmonic Balance (IHB) method is an efficient semi-analytical approach for solving periodic motions in strongly nonlinear systems. It is particularly advantageous for analyzing bifurcation points and boundaries, periodic and subharmonic orbits, chaotic parameter domains, and routes to chaos.
30
Accordingly, the IHB method is employed here to analyze the periodic solutions of the NES system. Considering the dynamic system in Eq. (6), where



The first step of the IHB method is the Newton–Raphson incremental procedure. Let

Substituting Eq. (8) into Eq. (7), performing a Taylor expansion, and neglecting higher-order terms in the increment yields the incremental equation:


The second step of the IHB method is the Ritz–Galerkin harmonic-balance procedure. Because Eq. (7) contains only cubic nonlinear stiffness terms, the steady-state periodic solution can be approximated by a finite superposition of odd-order harmonics in the following Fourier-series form:





Let

Substituting equation (11) into the first equation of the incremental equation (9), and applying the Galerkin process over one time period, we obtain a system of linear algebraic equations for the increments



The computational accuracy of the IHB method depends on the prescribed number of harmonic terms used in the periodic solution. When the truncation orders for the harmonics are set to


The stability of the periodic solutions obtained by the IHB method is determined on the basis of Floquet theory. Stability is assessed by calculating the Floquet multipliers (i.e., the eigenvalues of the monodromy matrix) associated with the linearized perturbation equation about the periodic solution. 31
By selecting the parameters Amplitude-frequency characteristics curve of the nonlinear energy sink response.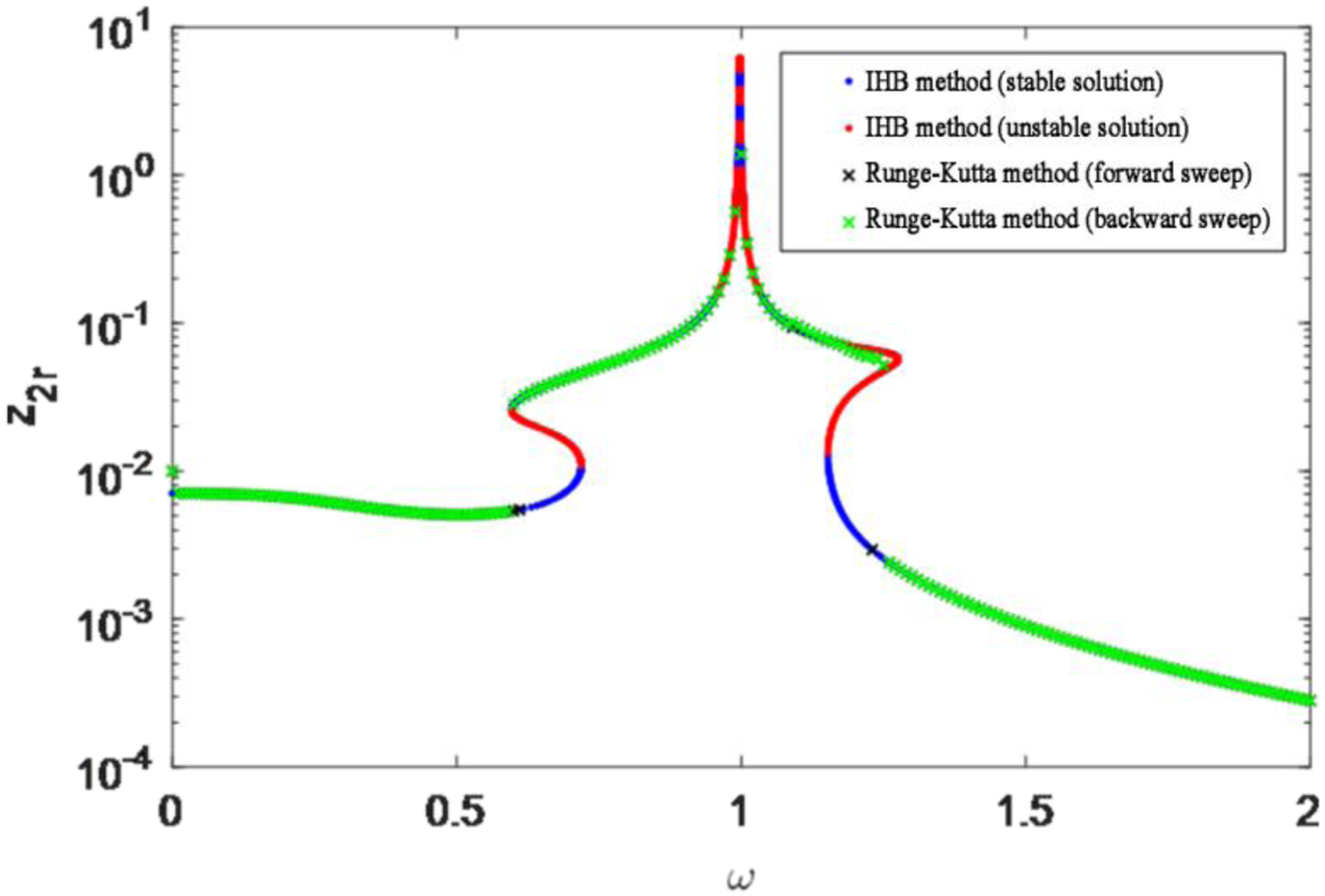
3.2. Vibration suppression effect analysis of nonlinear energy sink
To evaluate line-spectrum suppression under varying excitation conditions, two indicators are considered: resonance-peak attenuation and the vibration absorption bandwidth of the NES for the mechanical equipment.
32
Common evaluation methods mainly include the generalized transfer-rate method based on the nonlinear frequency-response function and the classical energy-analysis method. The generalized transfer-rate method is mainly suitable for NES systems under base excitation, whereas the energy-based method is more general. For the system described by equation (6), the total energy
It should be noted that since the Incremental Harmonic Balance (IHB) method can only obtain the system’s steady-state periodic solution, when the periodic solution becomes unstable, the system may exhibit quasi-periodic or chaotic responses. In such cases, the unstable response obtained by the IHB method will differ from the true response of the system. For unstable periodic solutions, the integration duration
For the case without a coupled NES, the equation of motion of the primary system is given by:

The steady-state periodic solution can be assumed in the pre-set form

Further, the steady-state vibration energy of the system can be accurately expressed by the maximum potential energy equation:

First, the influence of NES damping is discussed. Keeping the parameters fixed as Influence of nonlinear energy sink damping on vibration suppression effects. (a) Frequency range 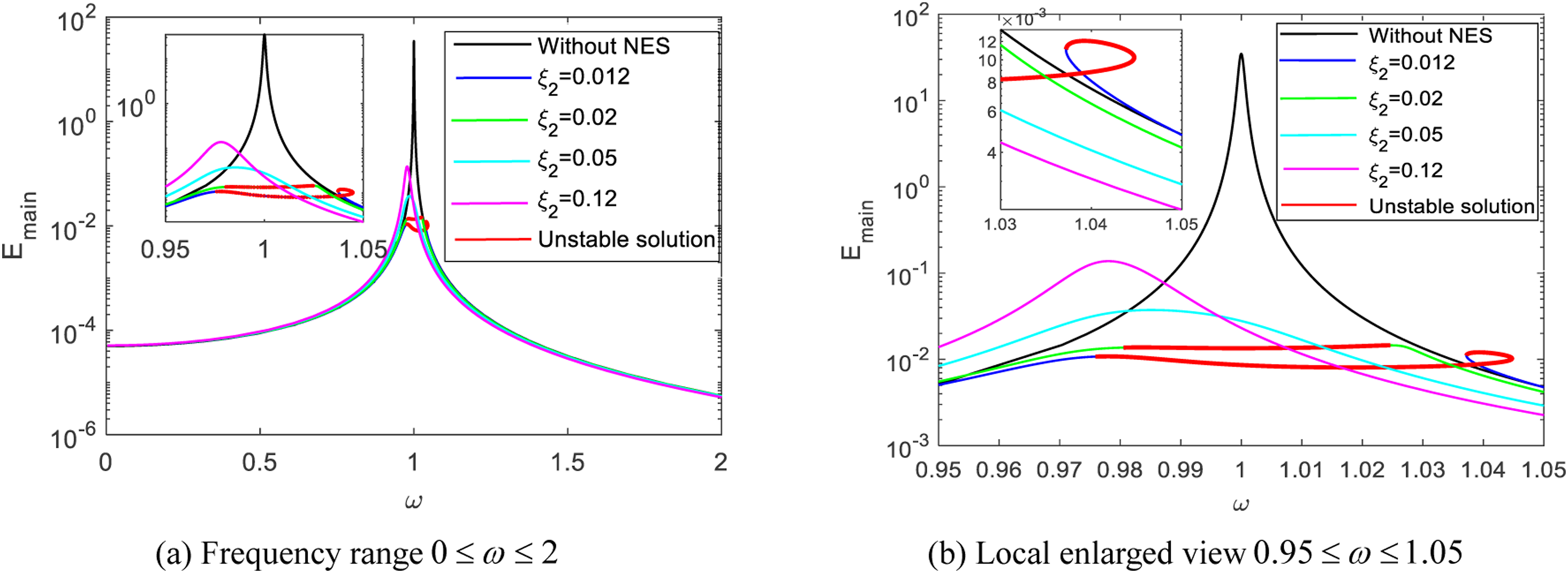
Next, the influence of the NES mass is discussed. Keeping the parameters fixed as Influence of nonlinear energy sink mass on vibration suppression effects. (a) 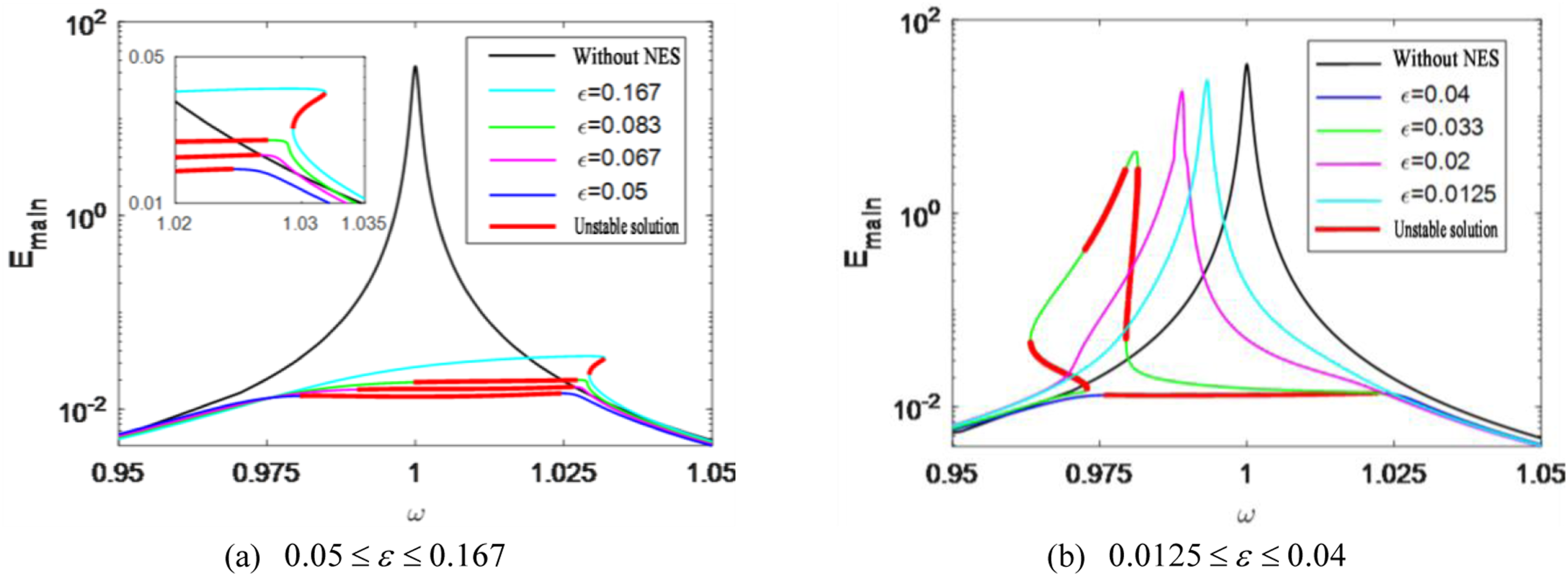
Finally, the influence of the NES stiffness is discussed. Keeping the parameters fixed as Influence of nonlinear energy sink stiffness on vibration absorption effect. (a) 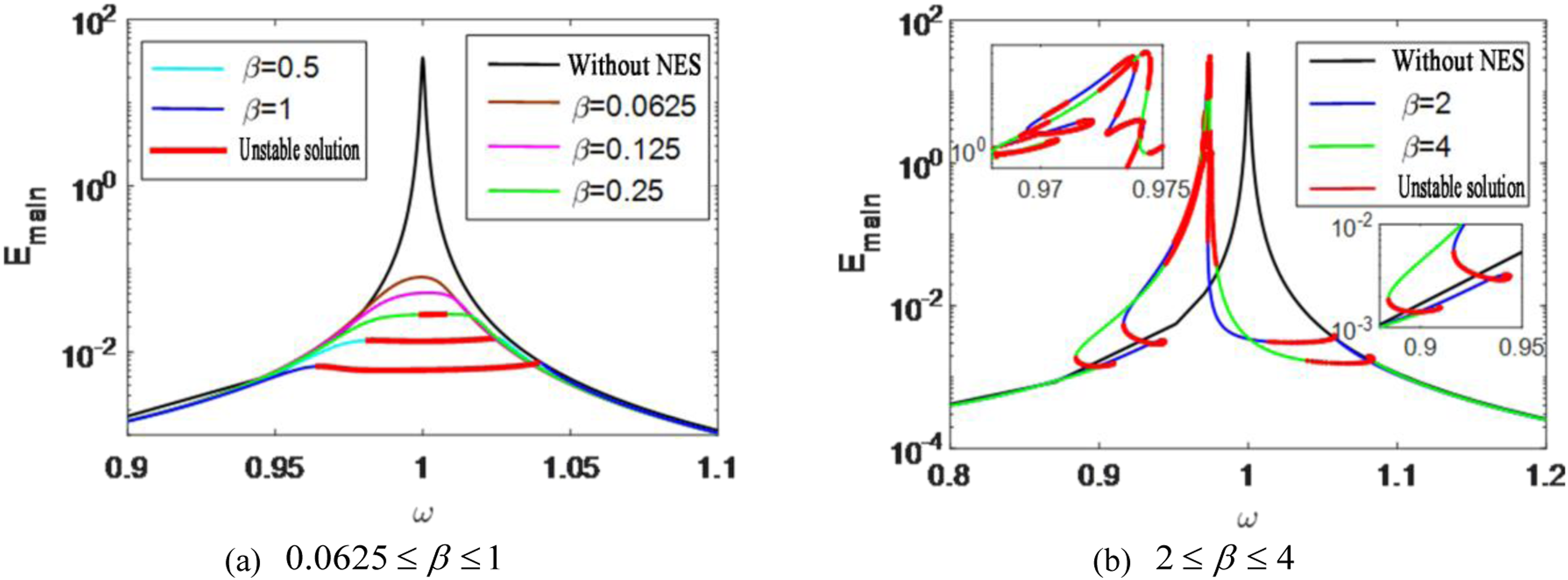
4. Local parameter optimization of the flexible hinge-type nonlinear energy sink system
4.1. Nonlinear energy sink parameter optimization
To determine the optimal damping and stiffness of the NES, the optimization variables and their ranges are defined as follows:

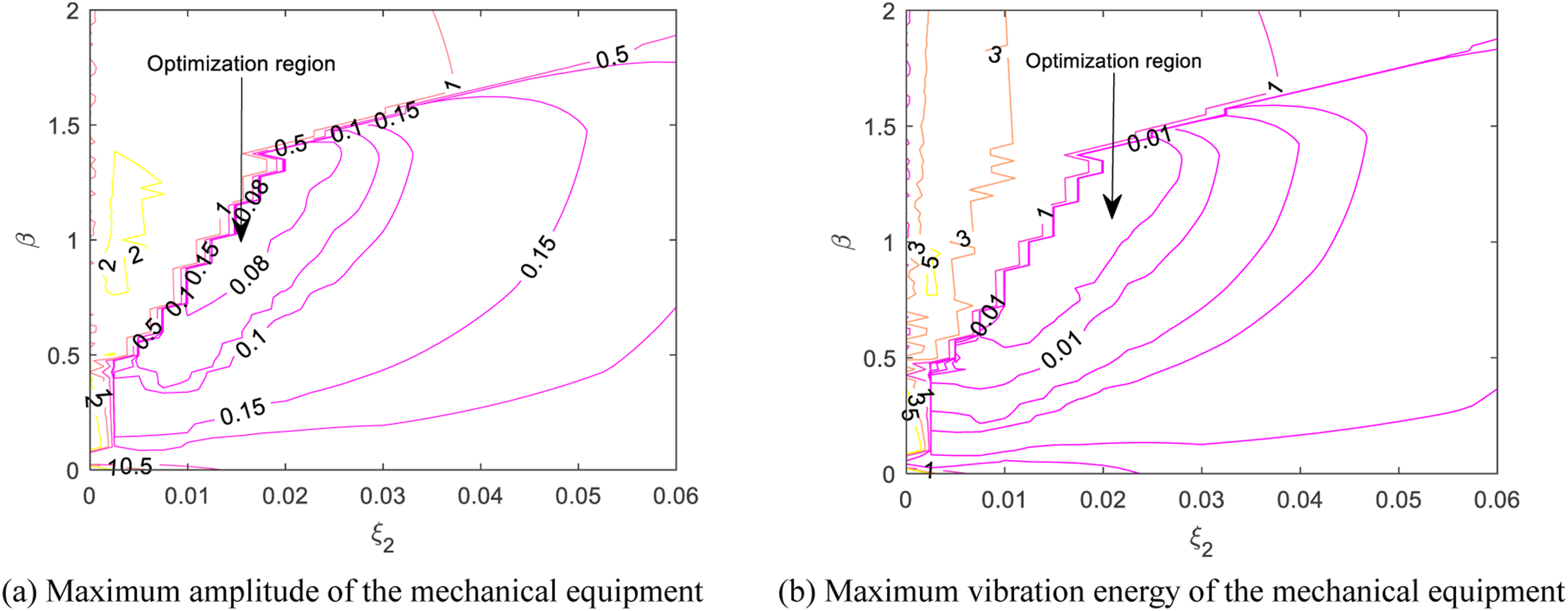
The optimization objective is to minimize the maximum response amplitude and vibration energy of the mechanical equipment near resonance for each parameter set


Because the above objective functions do not admit explicit analytical expressions, direct local optimization is carried out using the Runge-Kutta method combined with an enumeration procedure. The initial conditions are set to 0, the excitation frequency range is
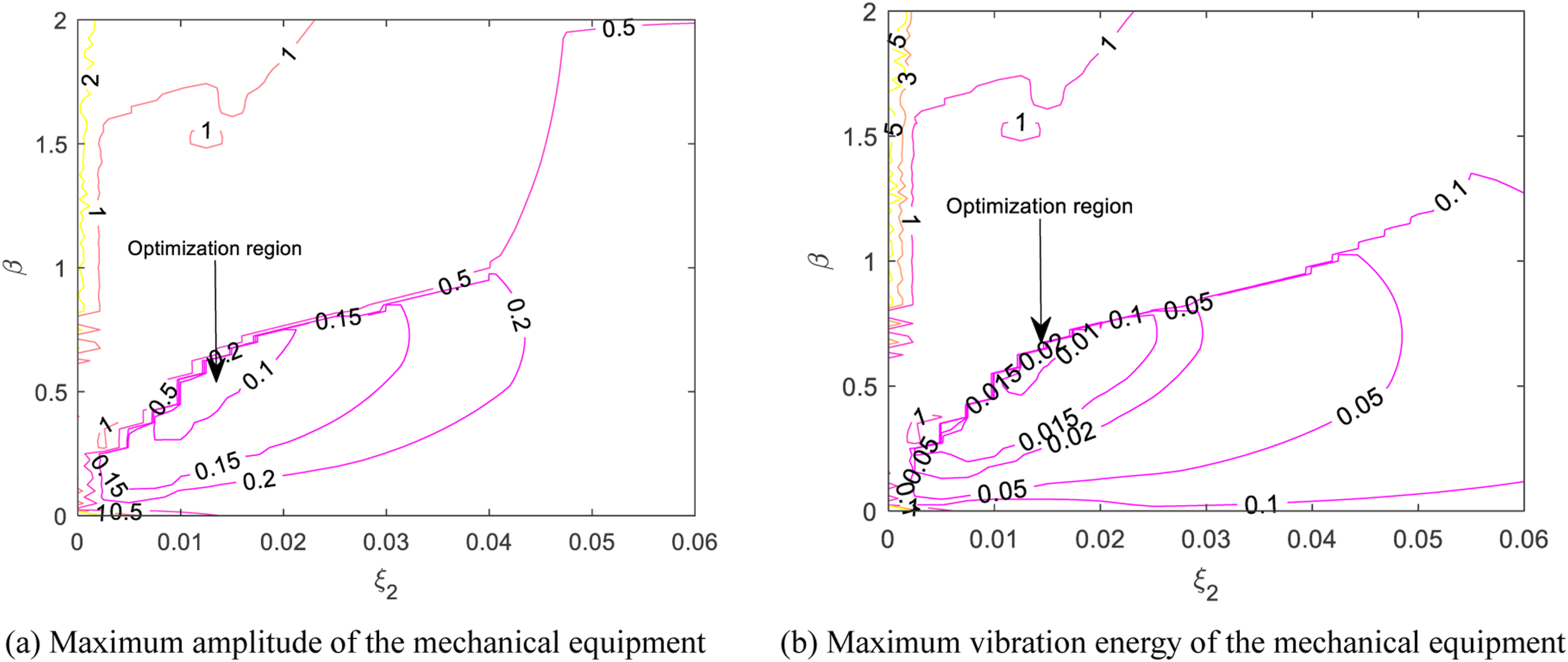
When the mass ratio is taken as 3D plot of the maximum amplitude or maximum vibration energy of the mechanical equipment versus damping and stiffness when the mass ratio is ε = 0.04. Contour plot in the 2D plane of the two optimization results when the mass ratio is ε = 0.04.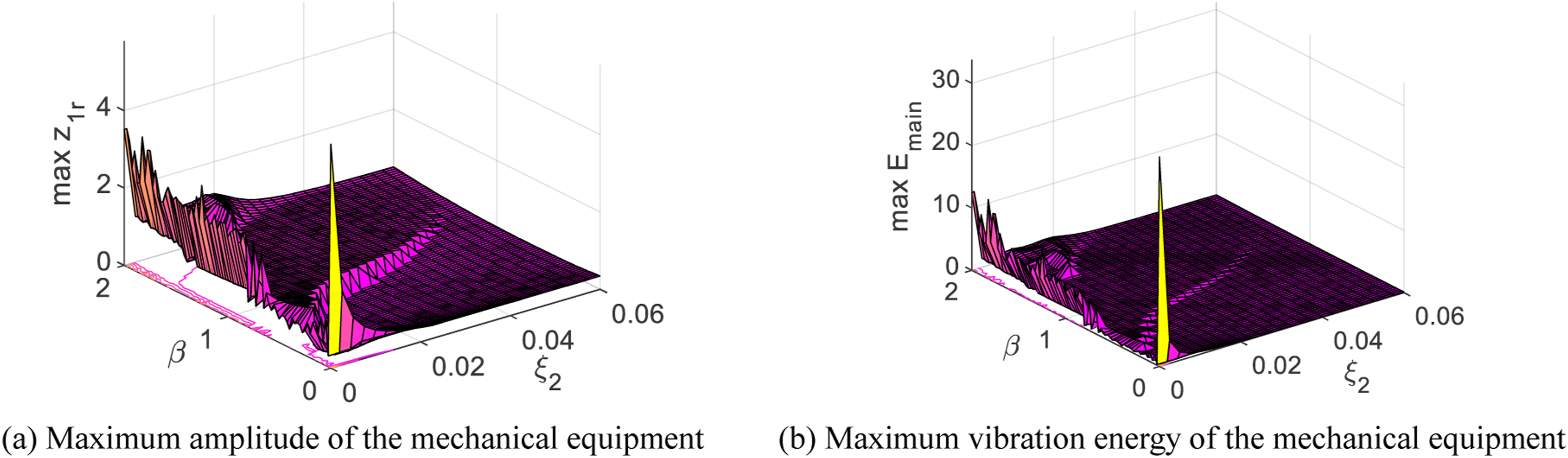
If the mass ratio is taken as 3D plot of the maximum amplitude or maximum vibration energy of the mechanical equipment versus damping and stiffness when the mass ratio is 0.05. (a) Maximum amplitude of the mechanical equipment, (b) maximum vibration energy of the mechanical equipment. Contour plot in the 2D plane of the two optimization results when the mass ratio is 0.05.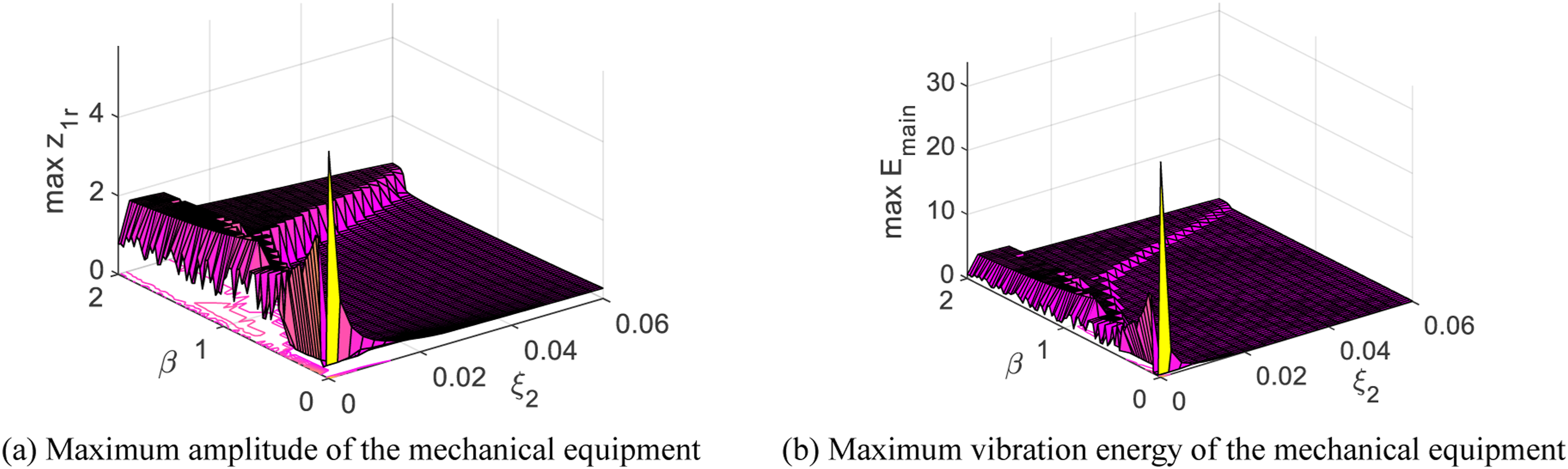
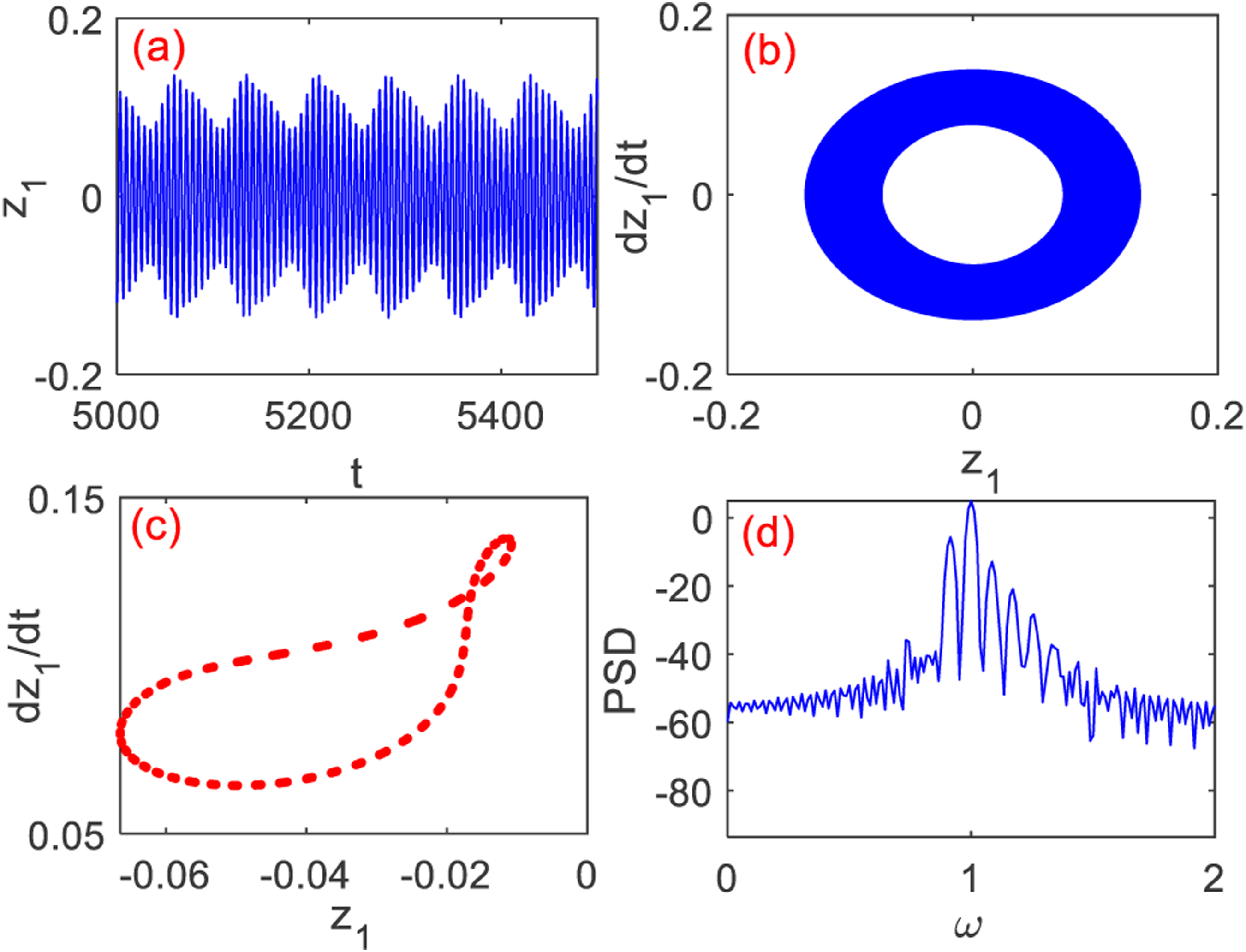
If the parameters Vibration response of the mechanical equipment with Vibration response of the mechanical equipment with 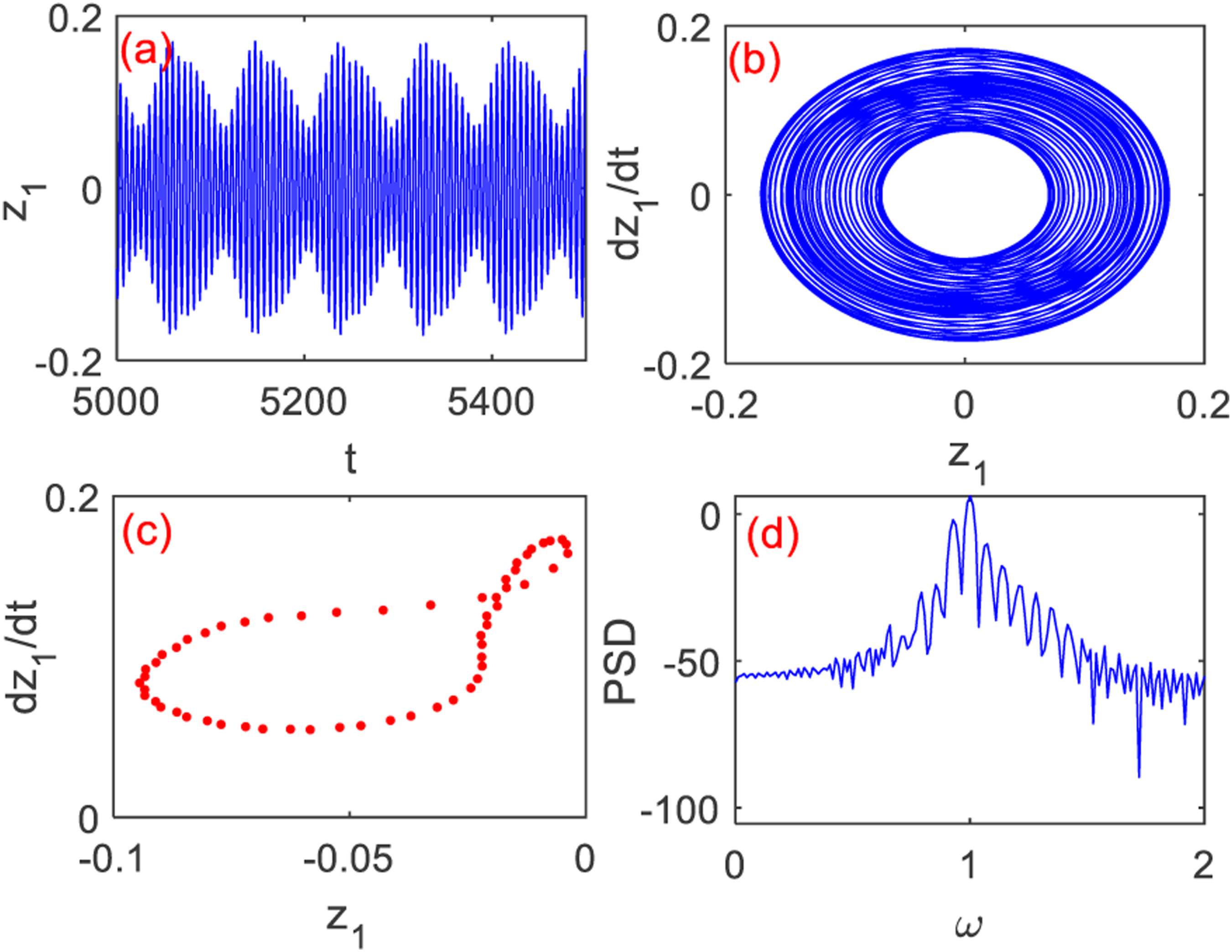
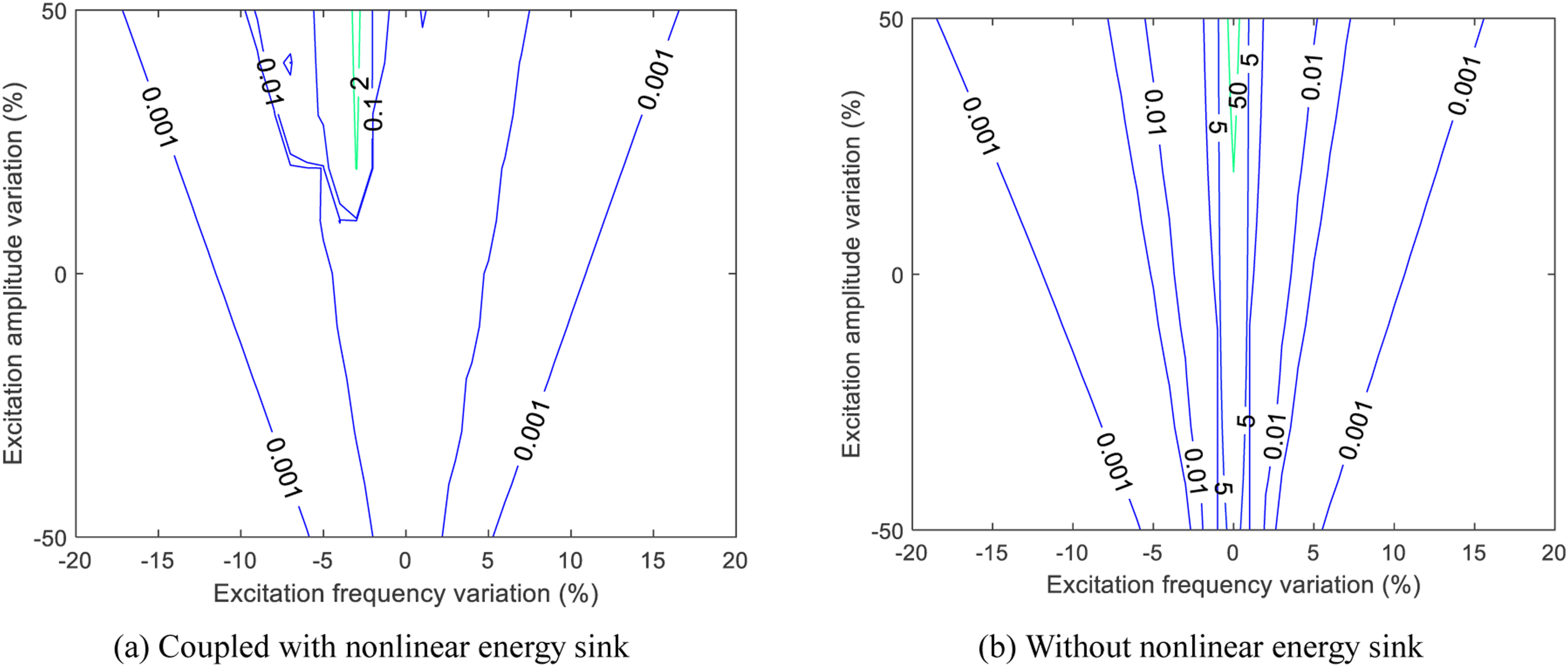
4.2. Sensitivity analysis of nonlinear energy sink parameters
Using the optimized parameters 2D contour plots of the mechanical equipment’s response amplitude versus excitation frequency and amplitude. (a) Coupled with nonlinear energy sink, (b) without nonlinear energy sink. 2D contour plots of the mechanical equipment’s vibration energy versus excitation frequency and amplitude. (a) Coupled with nonlinear energy sink, (b) without nonlinear energy sink.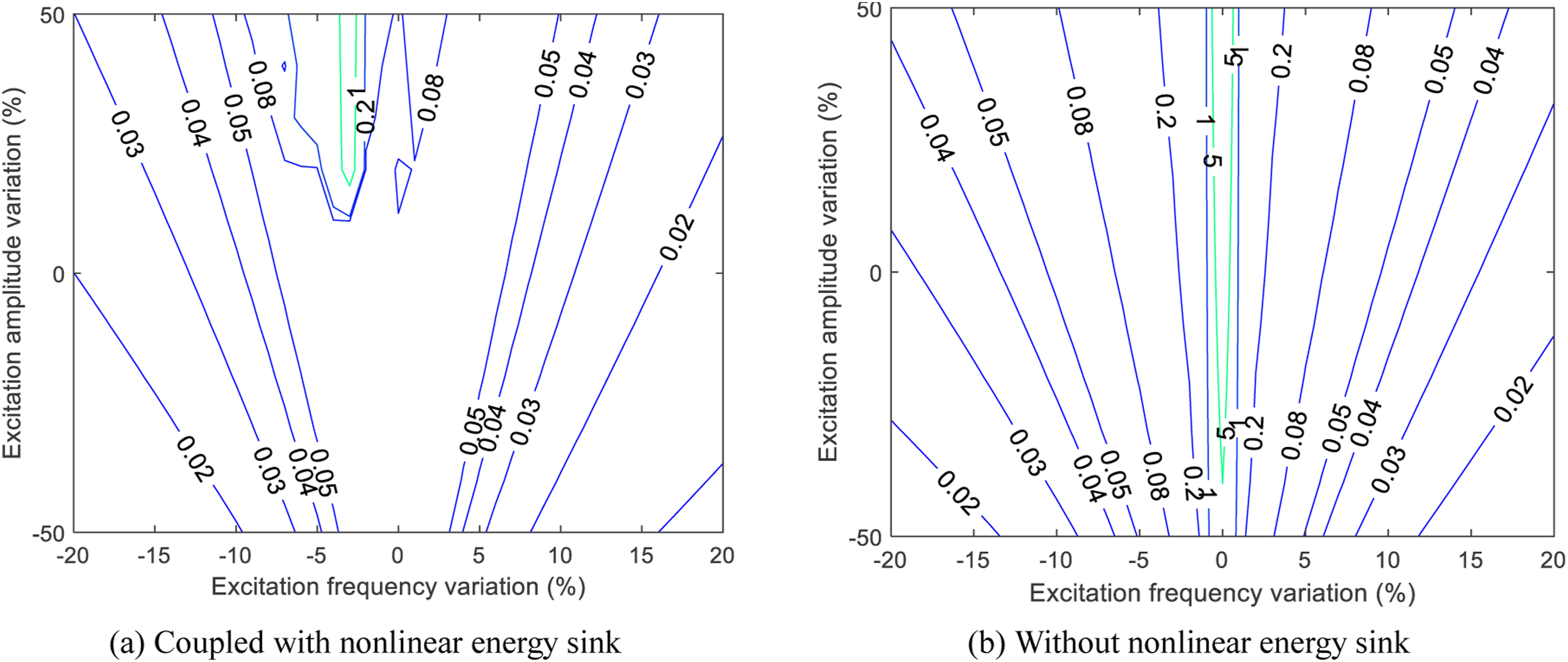
4.3. Comparison of vibration suppression effects between nonlinear energy sink and equivalent linear vibration absorber
For Eq. (6), the equation of motion of the equivalent linear vibration absorber system can be written as follows:





With the primary system parameters Comparison of amplitude-frequency characteristics between nonlinear energy sink and equivalent linear vibration absorber.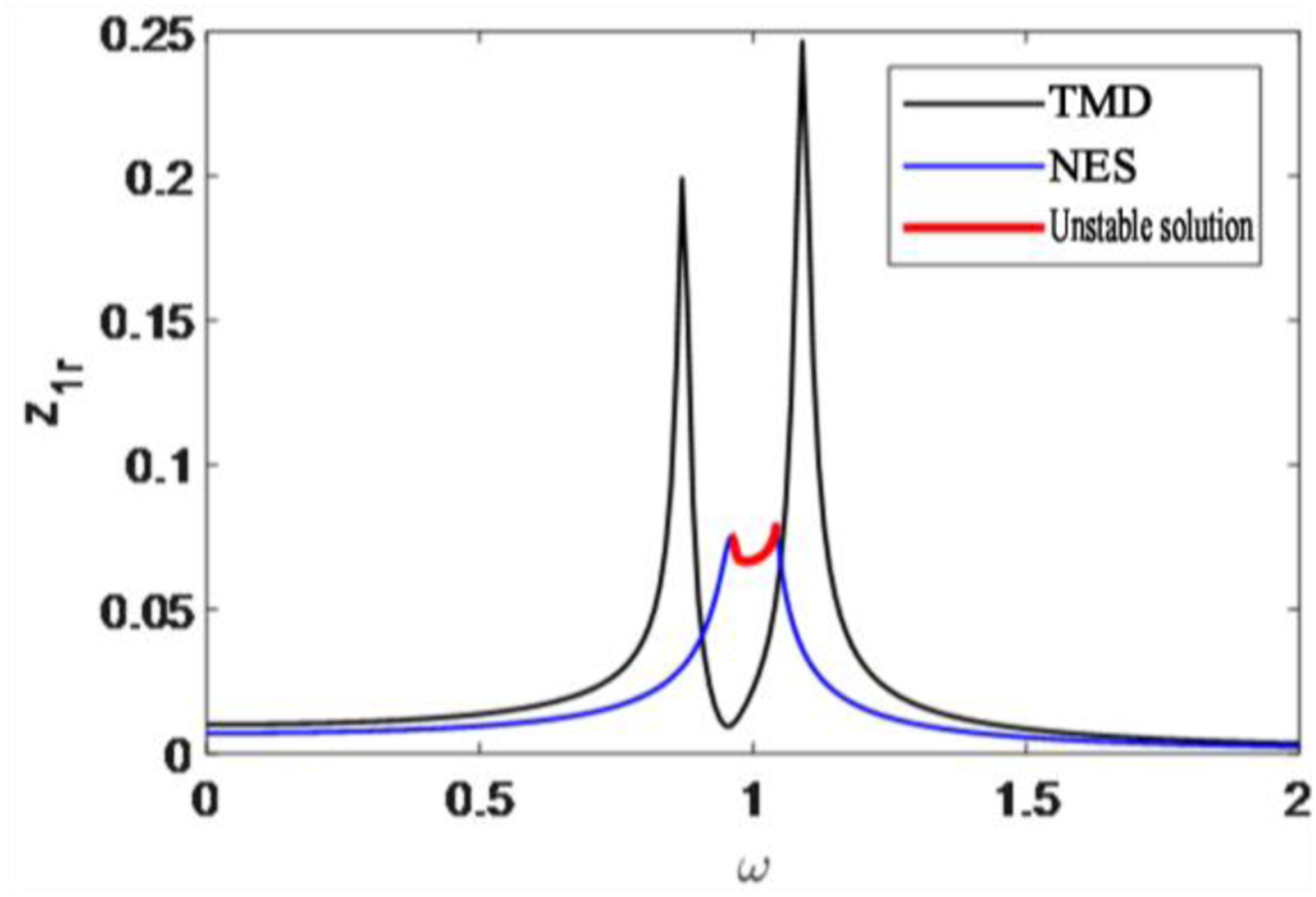
5. Experimental investigation of the flexible hinge-type nonlinear energy sink system
5.1. Prototype of the flexible hinge-type nonlinear energy sink
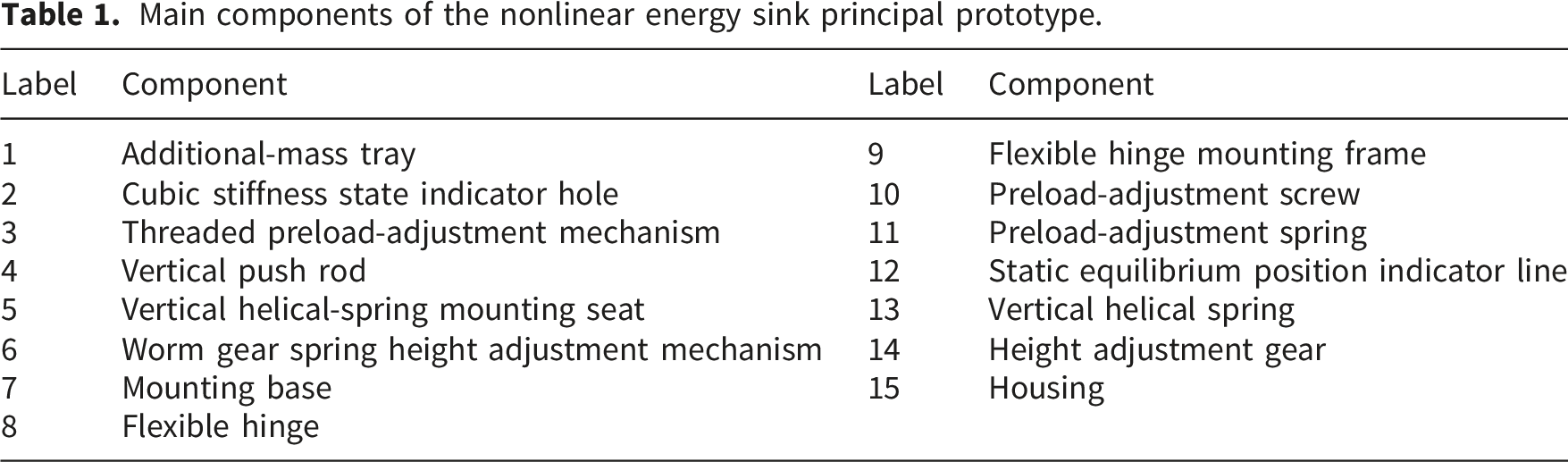
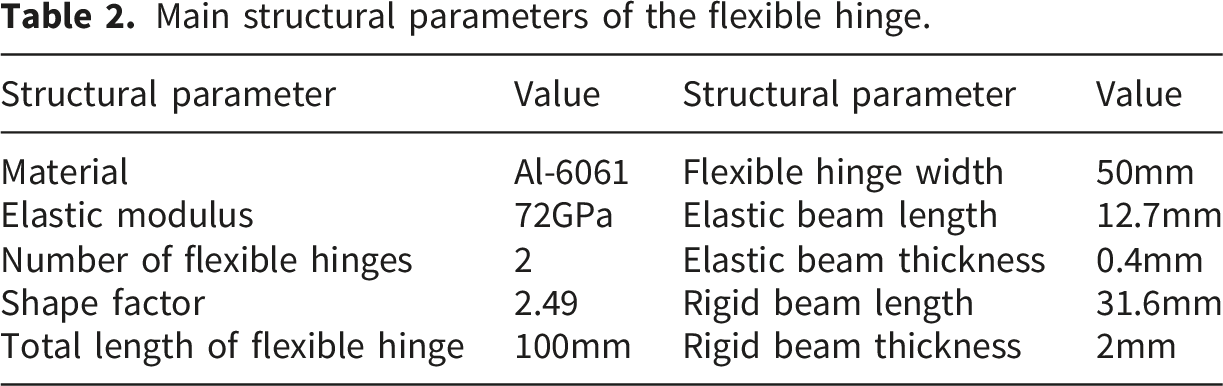
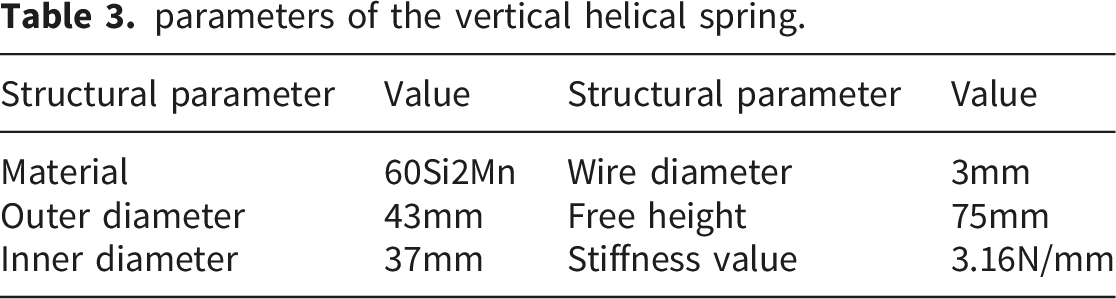
Figure 20 shows the three-dimensional structure and sectional view of the prototype flexible hinge-type NES. The main components in the figure are shown in Table 1. As shown in the figure, the device consists of four flexible hinges (two pairs). To reduce the overall design size, the flexible hinges are symmetrically folded and mounted through the frame. The The preload is adjusted uniformly by the threaded screw mechanism (3). The vertical helical spring is arranged on the mounting seat, and the height of the mounting seat is adjusted by the worm gear mechanism to meet the different mass-carrying requirements of the NES. The design range of the additional mass is 8-12 kg. When the static equilibrium position and the cubic stiffness state indicator pin are located at the center of their respective indicator holes, this indicates that the NES is in its normal initial operating state. In addition, the main structural parameters of the flexible hinge and the vertical helical spring are listed in Tables 2 and 3, respectively. When the preload adjustment spring is removed, the flexible hinge is no longer preloaded, and the prototype can be regarded as an equivalent linear vibration absorber. Three-dimensional structure and sectional view of the prototype nonlinear energy sink. Main components of the nonlinear energy sink principal prototype. Main structural parameters of the flexible hinge. parameters of the vertical helical spring.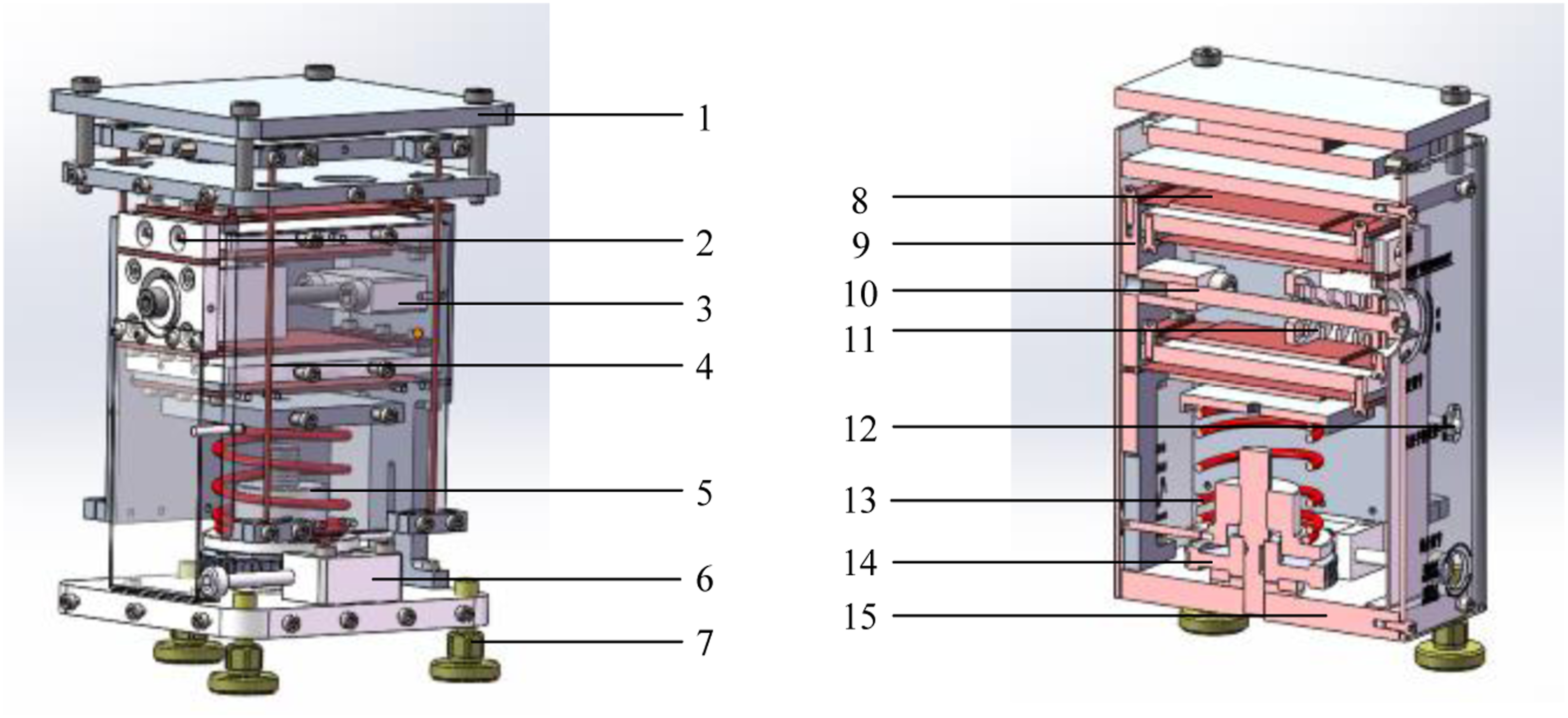
5.2. Static mechanical characteristics test of the flexible hinge-type nonlinear energy sink
The static stiffness of the prototype was measured using an electronic universal testing machine is shown in Figure 21. Figure 22 presents the static stiffness test results of the NES prototype. In the figure, the green curve represents the measured data, whereas the red curve represents the cubic polynomial fit. The figure, shows that the prototype exhibits clear nonlinear characteristics near the static equilibrium position (x=3 mm). Additionally, the static stiffness curve exhibits hysteresis during both loading and unloading. This hysteresis may be attributed partly to the measurement precision of the testing machine and partly to the elastic potential energy stored in the preloaded flexible hinge, which makes its stiffness characteristics sensitive to external loading. Although some deviation exists between the fitted and theoretical values at large displacements away from the static equilibrium position, the overall trends of the curves agree well. Static mechanical characteristics test of the nonlinear energy sink prototype. Static stiffness test results of the nonlinear energy sink prototype. (a) Measured values, (b) theoretical values.

5.3. Dynamic characteristics test of the flexible hinge-type nonlinear energy sink
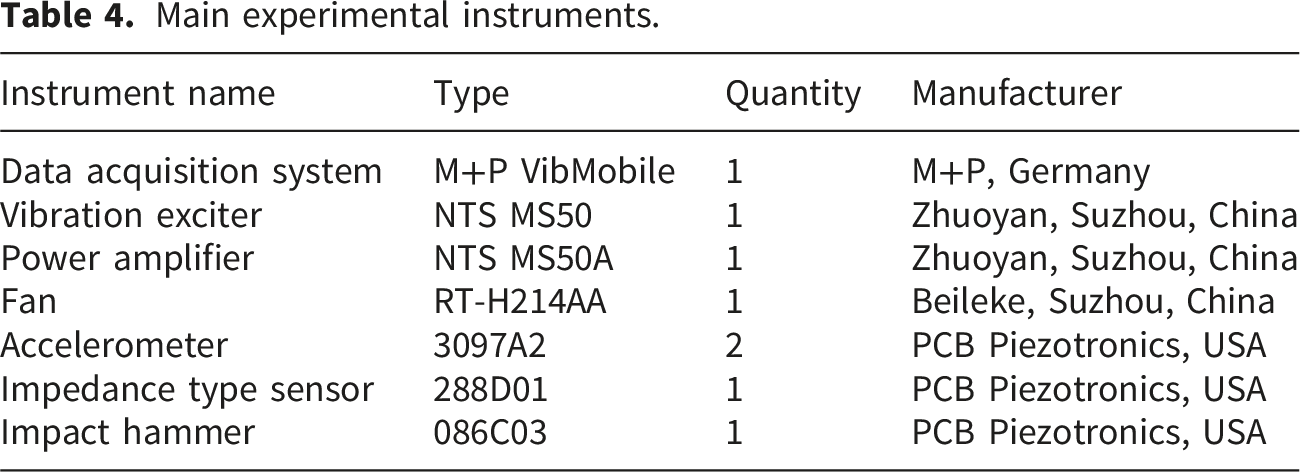
Photographs of the dynamic test setup are shown in Figure 23. In this setup, the primary system is represented by a single-layer vibration-isolation platform, with a uniformly distributed mass of mass of Photos of the test site.
Main experimental instruments.
First, the gain of the power amplifier was set to 5%, and the corresponding frequency-sweep results are shown in Figure 24. Figure 24(a) shows the output force measured by the impedance sensor under different operating conditions, whereas Figure 24(b) shows the normalized average acceleration-response amplitude of the primary system under the same conditions. As shown in the figure, the first- and second-order natural frequencies of the primary system are approximately 5.05 Hz and 10.85 Hz, with average response amplitudes of 71.85 dB and 59.60 dB, respectively. When an equivalent linear absorber is added, the first-order resonance peak decreases by approximately 12.04 dB, and increasing the damping slightly improves the average vibration-absorption performance over the 4-6 Hz range. However, two new resonance peaks appear at 4.81 Hz and 5.50 Hz, especially near 5.50 Hz, and the vibration response of the primary system deteriorates accordingly. When the nonlinear energy sink is added, the overall response curve of the system shifts to the right, and the device does not exhibit a pronounced vibration-absorption effect under either damping condition. This behavior is mainly attributed to the potential energy stored in the flexible hinge under preload, which makes the nonlinear energy sink difficult to activate under small-amplitude conditions. As a result, the cubic-stiffness characteristics are not fully manifested, and the device cannot effectively absorb the vibration energy of the primary system. Frequency sweep test results of the nonlinear energy sink system under relatively lower excitation amplitude. (a) Input force, (b) main system vibration response.
Further increase the power amplifier gain to 10%, the specific frequency sweep test results are shown in Figure 25. From the figure, it can be seen that the first and second natural frequencies of the main system are located at approximately 5.00 Hz and 10.44 Hz, respectively, with average response amplitudes of 73.60 dB and 58.48 dB. When the equivalent linear vibration absorber is attached, the vibration attenuation effect is more pronounced over 4.75-6.82 Hz. Under low- and high-damping conditions, the first-order resonance peak is reduced by approximately 2.93 dB and 3.74 dB, respectively. However, at the same time, the system response exhibits two significant new resonance peaks near 7.63 Hz and 7.19 Hz. When the NES is added, under low damping conditions, the system response curve slightly shifts to the right, and the system remains difficult to activate, and effective vibration attenuation is not yet observed. However, as the damping increases, the vibration absorption performance of the NES changes significantly. On the one hand, the first-order resonance peak near 5.0 Hz decreases by 8.17 dB. On the other hand, over 4.43–5.82 Hz, the system response curve becomes smoother, in the frequency range of 4.43 Hz to 5.82 Hz, the system response curve becomes smoother, with the average line spectrum intensity decreasing by approximately 3.74 dB. The original first-order resonance peak disappears, and no new resonance peaks are generated. Therefore, compared to the equivalent linear vibration absorber, the NES exhibits good broadband vibration absorption performance under high-damping conditions. Taking 5.00 Hz as the reference frequency point, the vibration absorption bandwidth near the first-order resonance peak widens by approximately 27.8%. Frequency sweep test results of the nonlinear energy sink system under relatively higher excitation amplitude. (a) Input force, (b) main system vibration response.
Furthermore, after adding the NES, the second-order resonance peak frequency of the system slightly shifts to the right. The system response amplitude near 10.44 Hz is somewhat reduced, but the response amplitude near 9.75 Hz increases. Thus, the broadband vibration absorption advantage of the NES is mainly manifested around the first-order resonance peak, with the vibration absorption effect on the second-order resonance peak being less significant.
With the magnetorheological damper installed, the time-domain acceleration response signal of the primary system at an excitation frequency of 5.00 Hz is shown in Figure 26. The figure shows that when the NES is not added, the average acceleration response amplitude of the primary system is 0.488 m/s2, and it exhibits clear periodic motion. After the NES is added, the acceleration response amplitude of the NES becomes larger than that of the primary system. The average acceleration response amplitude of the primary system is approximately 0.195 m/s2, which corresponds to a 60.04% reduction in the average response amplitude relative to the system without the NES. Additionally, after adding the NES, the system no longer exhibits simple periodic motion; both oscillators exhibit clear periodic modulation in their response amplitudes. Time-domain vibration response of the main system. (a) Without nonlinear energy sink, (b) with nonlinear energy sink.
Figure 27 compares the simulated and experimental frequency-domain acceleration responses of the primary system under different excitation levels. In the figure, the blue curve represents the harmonic-balance simulation results, whereas the green symbols represent the experimental data obtained under the corresponding operating conditions. As shown in the figure, the simulated and experimental curves agree well in terms of resonance-peak position, bandwidth, and response amplitude, thereby verifying the reliability of the theoretical model. The overall response amplitude measured in the experiments is slightly lower than that predicted by the simulations, which may be mainly attributed to additional damping, nonlinear connection stiffness, and parameter-identification errors in the actual system. Simulated and experimental results for the frequency-domain acceleration response of the primary system under different excitation levels. (a) Power-amplifier gain = 5%, (b) power-amplifier gain = 10%.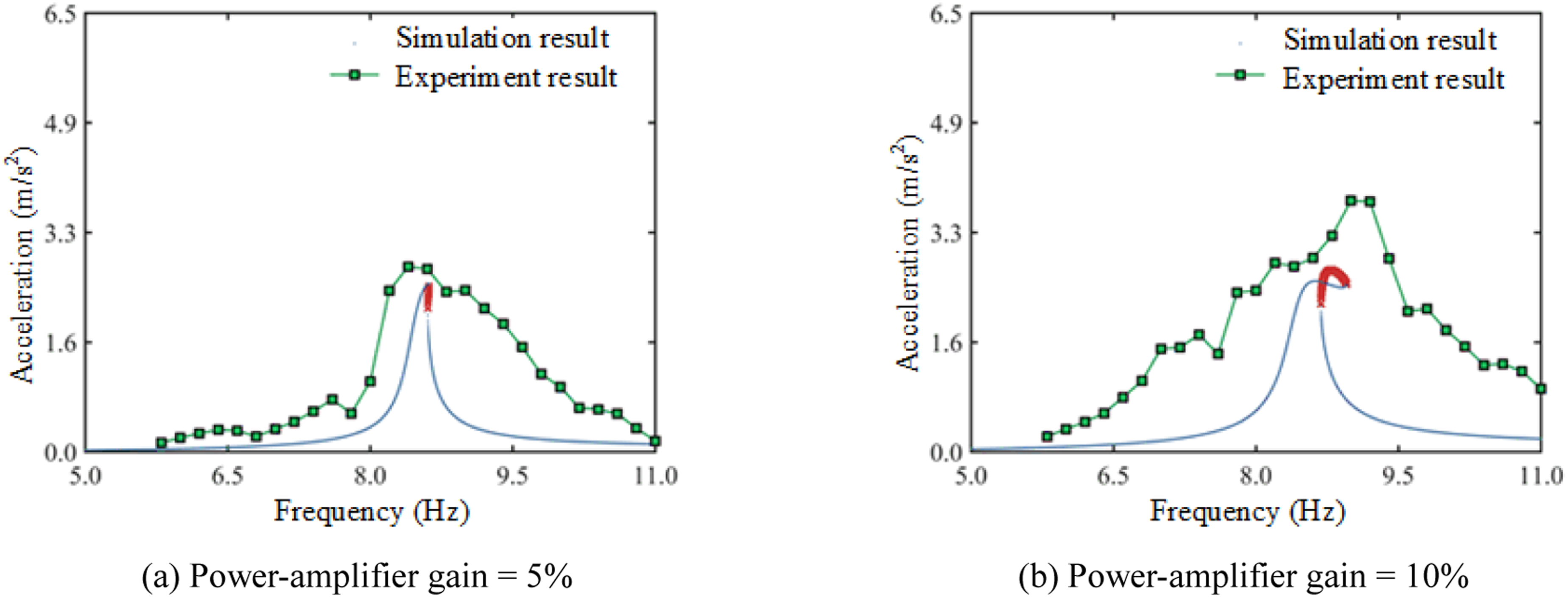
The time-frequency characteristics of the acceleration time series were analyzed using a wavelet transform, as shown in Figure 28. From the figure, it can be seen that when the excitation frequency is 5.00 Hz, the dominant response frequencies of both the primary system and the NES are centered around 5.00 Hz. This indicates that the NES can spontaneously shift the resonance frequency of the coupled system, causing it to enter a 1:1:1 internal resonance with the external excitation frequency. Through this strong modulation response, it periodically absorbs vibrational energy from the primary system over a broad frequency range. Therefore, the 1:1:1 internal resonance is the primary mechanism by which the NES reduces the characteristic line-spectrum level over a broad frequency range. Wavelet transform time-frequency plot of the system’s acceleration response at 5.00 Hz. (a) Primary system, (b) nonlinear energy sink.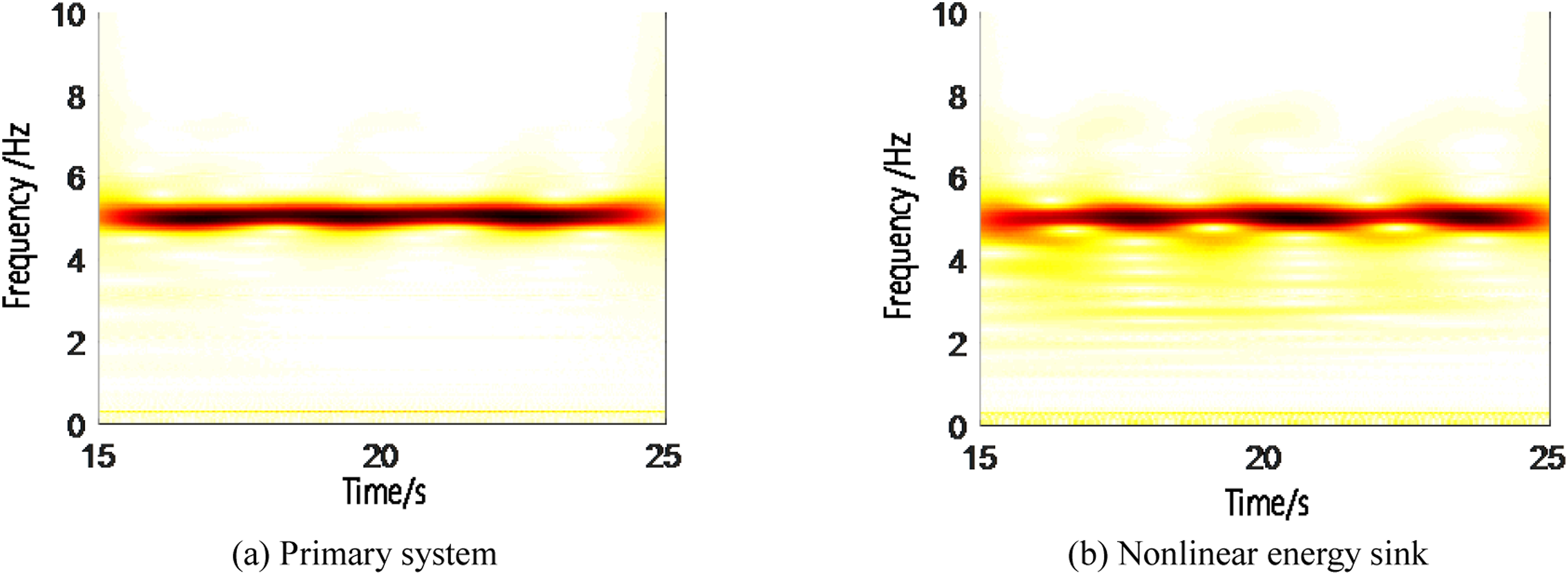
6. Conclusion
This paper addresses the suppression of low-frequency characteristic line spectra in ship machinery. Through theoretical analysis, numerical simulation, and experimental validation, the vibration suppression performance, parameter optimization, structural design, and testing of the NES system are investigated systematically. This study is of practical significance for improving the acoustic stealth performance of ships. The main findings are summarized as follows. (1) Based on the principle of positive and negative stiffness in parallel, a preloaded dual-slot flexible hinge-type NES is designed. An analytical expression for the static stiffness is derived, and the critical preload of the adjustment spring is determined. The influence of structural parameters on cubic stiffness characteristics is analyzed, and the static mechanical test results agree well with the theoretical analysis. (2) The incremental harmonic balance method is used to establish a procedure for computing steady-state periodic solutions of the NES system. The effects of three key design parameters—mass ratio, stiffness, and damping—on vibration suppression under harmonic excitation are analyzed. Using the maximum response amplitude of the mechanical equipment and the minimum peak vibration energy as objective functions, a local optimization algorithm is employed to identify the optimal parameter region of the NES. (3) The frequency-sweep test results indicate that the NES not only reduces the first-order resonance peak near 5.00 Hz by approximately 8.17 dB, but also provides effective broadband vibration absorption over 4.43–5.82 Hz. The average line-spectrum level is reduced by about 3.74 dB, with no new resonance peaks generated in other frequency bands. The vibration absorption bandwidth is widened by approximately 27.8%. In contrast, the equivalent linear dynamic vibration absorber still generates two significant resonance peaks around 7.63 Hz and 7.19 Hz under harmonic excitation. (4) The fixed-frequency test results show that the NES can shift the resonance frequency of the coupled system and can cause the system to undergo 1:1:1 internal resonance at the excitation frequency. At this point, both the primary system and the NES exhibit strong modulation responses, which underlie the broadband vibration absorption performance of the NES.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work is supported by funding from National Natural Science Foundation of China (Grant No. 52471354); Natural Science Foundation of Fujian Province Project (Grant No. 2025J011605).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.