
Abstract
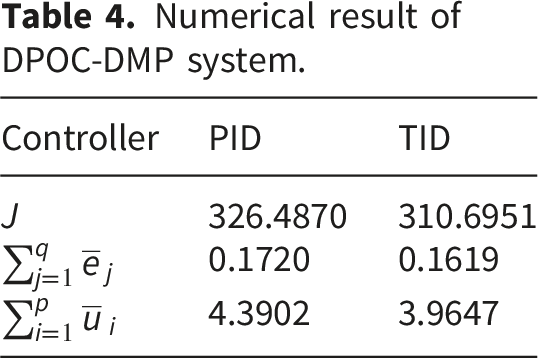
This study proposes a data-driven tilt–integral–derivative (TID) controller for a nonlinear multi-input, multi-output (MIMO) double-pendulum overhead crane system with a distributed-mass payload (DPOC-DMP), in which the controller parameters are tuned using the Safe Experimentation Dynamics Algorithm (SEDA). The main advantage of the proposed data-driven TID controller is its ability to enhance control accuracy and robustness without reliance on an explicit mathematical model. By incorporating a tilt action into the integral–derivative structure, the proposed TID controller significantly improves transient behaviour and suppresses load sway in nonlinear crane dynamics. The tuning of the TID controller parameters is performed using SEDA, which facilitates stable convergence via random but safeguarded perturbations. The effectiveness of the proposed TID controller was evaluated through simulations by analysing tracking errors, sway suppression, control effort, and robustness under external disturbances. Furthermore, the performance of the proposed controller was compared with that of a conventional PID controller. The results demonstrated that the proposed data-driven TID controller achieved superior performance in terms of objective function value, total tracking error, total control input energy, sway suppression capability, and faster recovery under external disturbance conditions. The simulation results show improved transient performance with reduced overshoot and enhanced sway suppression, together with lower control input energy compared with the PID controller. Quantitatively, the proposed method achieved a lower objective function value (310.6951 vs. 326.4870), reduced total tracking error (0.1619 vs. 0.1720), and lower control input energy (3.9647 vs. 4.3902), while maintaining faster recovery under disturbance conditions. In particular, the proposed TID framework improves control accuracy by 2.82% compared with the traditional PID controller, demonstrating its effectiveness in managing complex, nonlinear MIMO crane systems.
Keywords
Introduction
In recent years, the efficient management of crane systems has attracted considerable interest due to their pivotal role in container shipping and logistics, particularly in the loading and unloading cycle between ocean freighters and port terminals. The primary objectives include reducing freight costs, simplifying loading procedures, decreasing energy consumption, minimizing mechanical complexity, and expanding handling capacity through technological progress. 1 Compared with bridge structures, controlling cranes is significantly more challenging due to their underactuated nature, strongly coupled dynamics, and nonholonomic constraints. These traits render precise positioning difficult, even with the installation of supplementary devices, such as column-mounted dampers.2,3 A particular challenge is payload swing and bounce during load transfer, which has prompted both industry practitioners and control engineers to develop accurate controllers capable of moving loads faster while suppressing oscillations and residual motion. Beyond crane systems, differential equations are extensively analysed in applied mathematics to model diverse phenomena, such as fractional-order dynamics in population systems, 4 the stability of nonlinear biochemical reactions, 5 and the evolution of complex networks under stochastic perturbations. 6 While these studies offer rigorous theoretical frameworks for various domains, the complex mechanical coupling and underactuated nature of cranes necessitate specialized data-driven control to bridge the gap between abstract mathematical modelling and practical performance.
In line with recent trends, control strategies have been developed to improve positioning accuracy and suppress swing in crane systems. A comparative study of a backstepping controller was conducted by Y. Li et al., 7 which ensured fast trolley positioning and effective swing suppression in underactuated bridge crane systems by decomposing the nonlinear dynamics into manageable subsystems. A variable-parameter, time-varying sliding mode controller was introduced by Wang et al. 8 for distributed-mass double-pendulum bridge cranes. The controller dynamically adjusted its sliding surface to improve robustness, suppressed load swing to within 5°, and eliminated chattering under uncertain operating conditions. In the same year, an H∞ output-feedback controller was introduced by C. Li et al. 9 to position and suppress payload swing precisely in a nonlinear overhead crane system. This was accomplished by modelling nonlinearities with a Takagi–Sugeno fuzzy approach, estimating unmeasured states through a fuzzy observer, and applying a “virtual desired-variable synthesis” method to transform the tracking problem into a stabilization task while attenuating external disturbances.
Subsequently, a finite-time sliding mode controller was designed and introduced by Nguyen et al. 10 to stabilize a fuzzy overhead crane carrying copper electrode plates. The controller achieved finite-time convergence and maintained minimal swing under disturbances such as friction and air resistance by linearizing the coupled nonlinear dynamics. In the same year, L. Yang & Ouyang 11 introduced a precision-positioning adaptive controller to achieve accurate trolley and beam positioning. The controller employed adaptive update laws to handle uncertainties such as varying payload mass, rope length, and friction errors without requiring model linearization or swing angle feedback. While the aforementioned control methods have shown promising results in managing single-input multi-output (SIMO) crane systems, their effectiveness remains limited in more complex multi-input, multi-output (MIMO) crane systems. A SIMO crane system refers to a control setup where a single input signal, such as voltage or force, is used to influence multiple output variables of a crane, such as the horizontal position of the trolley and the swing angle of the payload. 12 This configuration is typically suitable for simplified crane models with minimal actuator interactions. Therefore, existing SIMO control schemes may no longer be effective in addressing the challenges posed by MIMO crane systems.
Acknowledging the limitations of conventional SIMO-based control strategies, researchers have increasingly shifted towards multi-input, multi-output (MIMO) frameworks that account for additional control channels and provide a more realistic representation of actual operations. In response to the increased complexity of MIMO crane systems, advanced methods like Linear Quadratic Regulator (LQR) 13 and energy-based nonlinear controllers 14 have been explored to enhance coupling and reduce oscillations. Further developments include adaptive fractional-order sliding mode control for fault tolerance 15 and adaptive fuzzy control to manage dead zones and strong nonlinearities. 16 Expanding on these advancements, recent literature has introduced robust mechanisms to address environmental disturbances and mechanical constraints. Al Saaideh et al. 17 proposed a backstepping controller integrated with an extended high-gain observer for offshore cranes, demonstrating superior robustness against unknown wave-induced roll/heave motions while maintaining precise trajectory tracking. For 7-DOF overhead cranes, G. Li et al. 18 developed an adaptive nonlinear controller that utilizes an energy-like function to handle friction uncertainties and actuator overshoots, achieving better effectiveness and robustness compared to existing state-of-the-art methods. Addressing generalizability, Zhai et al. 19 designed an adaptive neural network unified control framework based on modified normal forms, which improves transient performance and mitigates the chattering problem inherent in traditional sliding mode controllers while guaranteeing stability under persistent disturbances. Additionally, Y. Yang et al. 20 introduced a barrier function-based adaptive composite sliding mode control that integrates actuated and underactuated state errors on a single surface, enhancing coupling and reducing energy consumption through simplified structural complexity. To further optimise operational safety under input constraints, Y. Yang et al. 21 developed a model-free PID-SMC method using a time-varying scale function, which allows for predetermined steady-state and transient performance without requiring prior knowledge of uncertainty upper bounds. In summary, while traditional linear and energy-based mechanisms focus on basic stability, these recent adaptive and composite strategies prioritize superior robustness against unmodelled disturbances and environmental uncertainties while significantly reducing the energy required for oscillation suppression through more efficient coupling mechanisms.
Although these MIMO methods have improved realism and robustness, they still present two major gaps. First, most designed MIMO controllers are model-based, requiring accurate mathematical models to achieve good performance. As a result, any modelling errors or oversimplifications can significantly degrade controller effectiveness, making these approaches highly sensitive to model accuracy. Second, most existing crane control strategies have been developed for point-mass payloads (PMPs), which are simpler to model and control. In contrast, relatively few studies have addressed distributed mass payloads (DMP), which introduce additional nonlinearities and coupling effects. This gap highlights the need to investigate the efficacy of advanced model-free MIMO controllers for crane systems operating with DMPs, which require more adaptive and robust control strategies.
In addition to the aforementioned control schemes, PID controllers have been widely applied in control systems because of their simplicity, practicality, ease of implementation, and effectiveness, and several variants have been adopted for crane operations.
22
For example, Choi et al.
23
introduced a neural network-based two-degree-of-freedom PID (2-DOF PID) controller for gantry cranes, aiming to achieve precise trolley placement and minimize container swing. By employing a neural network self-tuner that adaptively adjusts its parameters
More recently, Elhabib et al. 25 designed a fractional-order PID (FOPID) controller with parameters optimised using a genetic algorithm in MATLAB. The controller demonstrated high precision in trolley positioning, a significant reduction in sway oscillations in double-pendulum cranes, and superior performance compared with classical PID controllers, while maintaining robustness across varying payload masses. Although these PID variants have demonstrated considerable success in improving performance and robustness, their effectiveness remains limited when applied to highly nonlinear, strongly coupled MIMO crane systems. In particular, very few studies have investigated controllers capable of simultaneously addressing trolley motion, hoist variations, and swing suppression under complex crane dynamics with DMP.
To address this research gap, the Tilt–Integral–Derivative (TID) controller is considered in this work, as it provides finer frequency-response shaping and additional tuning flexibility, offering strong potential to overcome the limitations of existing PID approaches in crane applications. The TID controller is a class of fractional-order controller that uniquely features a “tilted” proportional component, distinguishing it from a standard PID controller. Its advantages include enhanced capability to modify closed-loop system parameters and enhance overall robustness. In addition, it provides superior disturbance rejection compared with FOPID controllers, with the tilt component offering greater resilience while simplifying the tuning process.26,27 These features have enabled improved transient and steady-state performance as demonstrated in many applications such as load frequency control (LFC) of multi-area interconnected power systems, 26 magnetic levitation (Maglev) control, 27 combined frequency and voltage regulation in interconnected microgrids 28 and speed control and operation of brushless direct current (BLDC) motor drives for electric vehicles (EVs), 29 suggesting strong potential for MIMO crane system control.
In addition to active control strategies, passive anti-vibration structures have also been widely investigated for shock and vibration suppression in engineering systems. Among these approaches, X-structure-based mechanisms have attracted considerable attention due to their beneficial nonlinear stiffness characteristics and inherent vibration isolation capability without requiring external energy input. 30 Recent studies have demonstrated the effectiveness of X-structured mechanisms in various engineering applications, including bistable electromagnetic wave energy converters, 31 nonlinear inerter-based wave energy harvesters, 32 and multi-degree-of-freedom vibration isolation platforms. 33 Although these passive approaches provide reliable vibration attenuation with simple implementation, their performance is generally limited by fixed mechanical characteristics and lack of adaptability to varying operating conditions. In contrast, the active data-driven control approach proposed in this study offers greater flexibility and performance optimisation for nonlinear MIMO overhead crane systems with distributed mass payload.
Based on the identified gaps, this paper introduces a data-driven control framework based on interconnected TID controllers, designed for a MIMO double-pendulum overhead crane with distributed mass payload (DPOC-DMP). The motivation for this approach is to overcome the limitations of model-based controllers,34,35 which heavily depend on model accuracy, and to address the lack of studies involving distributed mass payloads (DMPs). 36 Unlike most existing crane control approaches that rely on accurate mathematical models or simplified payload representations, the proposed method employs a fully data-driven tuning mechanism that directly utilizes system response information for controller optimisation. This enables improved robustness against modelling uncertainties and nonlinear coupling effects compared with model-based controllers reported in the literature. Furthermore, while previous studies have primarily focused on SIMO crane configurations or point-mass payload models, the present work demonstrates improved tracking accuracy, sway suppression, and control efficiency in a nonlinear MIMO crane system with distributed mass payload. The obtained results show that the proposed data-driven TID controller achieves a lower objective function value and reduced control input energy compared with the conventional PID controller, highlighting its superior performance for complex crane dynamics. To achieve this, the Safe Experimentation Dynamics Algorithm (SEDA) is employed within the MATLAB/Simulink environment to fine-tune the five parameters of each TID controller. SEDA was selected because of its stochastic search capability to navigate complex, multimodal solution spaces and thereby avoid premature convergence when tuning TID gains. As described by Shukor et al., 37 its safe-experimentation update rule, simple tuning coefficients, and ability to retain the best parameters ensure a good exploration and exploitation balance, making it well-suited for data-driven control of the nonlinear MIMO DPOC-DMP system.
The evaluation compares the proposed TID controller with a conventional PID controller under the same benchmark setup, ensuring fairness in simulation parameters. Assessment criteria include convergence behaviour, integral of square error, integral of square input, overall performance index derived from the objective function, and time-domain response specifications, with additional evaluations under external disturbance scenarios. The simulation results demonstrated that the optimised data-driven TID controller achieves superior positioning accuracy for both trolley and hoist in the MIMO DPOC-DMP system. The controller also significantly suppresses hook and payload sway compared to the conventional PID controller, thereby enhancing robustness and ensuring operational safety under complex DMP dynamics. Based on these findings, the main contribution of this work is summarized as follows: (i) A novel data-driven TID control framework has been developed for the double-pendulum overhead crane with distributed mass payload (DPOC-DMP), representing one of the first reported attempts to address such a complex crane configuration. (ii) This work presents one of the first applications of the SEDA to tune a data-driven TID controller, providing reliable optimisation and ensuring effective convergence of controller parameters. (iii) The proposed data-driven TID controller significantly outperforms conventional PID controllers in stabilizing DMP crane dynamics, reducing error, suppressing oscillations, and enhancing robustness, thereby demonstrating the practical advantage of data-driven control over traditional model-based approaches.
The remaining sections of this paper are organized as follows: the next section presents the mathematical modelling of the DPOC-DMP, outlining the nonlinear dynamic equations that form the basis for controller development. The subsequent section introduces the proposed data-driven TID control framework, beginning with the formulation of the TID controller structure for the nonlinear MIMO crane system, followed by an overview of SEDA, and concluding with a detailed procedure for implementing SEDA to tune the TID controller parameters. This is followed by a section that evaluates the performance of the proposed data-driven TID controller through a series of simulation studies, including benchmarking against a conventional PID controller, assessing tracking accuracy, sway suppression capability, control effort efficiency, transient response characteristics, and robustness under external disturbances. Finally, the last section summarizes the findings of this work and provides concluding remarks.
Modelling of DPOC-DMP system
In this section, the mathematical modelling of the DPOC-DMP system is presented based on the formulation of Bello et al.,
36
providing dynamic equations that serve as the foundation for the proposed controller design. The dynamic equations for the DPOC-DMP are developed using the Euler-Lagrange method to account for its highly nonlinear, underactuated, and strongly coupled nature. While many studies simplify payloads as point masses, research by Bello et al.
36
emphasizes that incorporating distributed mass is crucial for accurately capturing the complex interactions and multiple oscillation modes seen in real-world crane operations. This validated dynamic model serves as the foundation for control strategies aimed at simultaneous trolley positioning and payload sway suppression. Figure 1 illustrates the schematic of the DPOC-DMP. The system consists of a trolley of mass Double-pendulum overhead crane with DMP.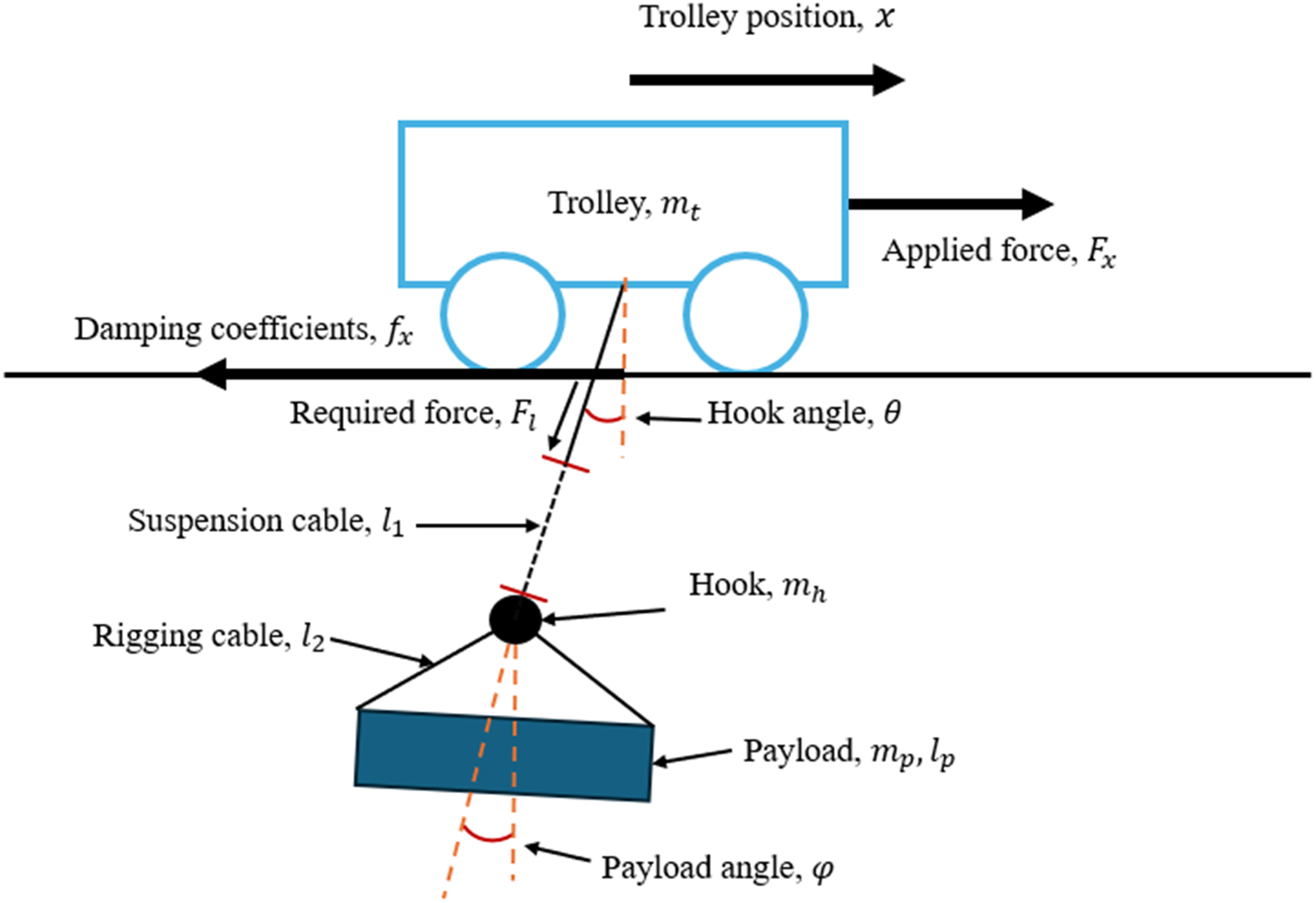
The nonlinear dynamics of the DPOC-DMP system are derived using the Lagrangian formulation and have been adopted directly from Bello et al.
36
To capture the practical operating conditions of crane systems, the modelling explicitly incorporates the hoisting mechanism, where the suspension cable length




DPOC-DMP parameters.

Data-driven TID control design based on SEDA
Building upon the nonlinear dynamics of the DPOC-DMP system derived in the previous section, this part introduces the proposed data-driven TID control framework. Firstly, the design of the TID controller for the MIMO DPOC-DMP is presented. Secondly, an overview of the SEDA algorithm is provided. Finally, the implementation of SEDA for data-driven tuning of the TID controller parameters is explained.
TID controller design
This section presents the design of the TID controller applied to the DPOC-DMP system. The Tilt-Integral-Derivative (TID) controller is a fractional-order control method that introduces a “tilted” proportional component to provide finer frequency-response shaping and increased tuning flexibility compared to conventional PID controllers. It has been shown to offer superior disturbance rejection and improved transient performance in various complex systems, such as magnetic levitation and interconnected power grids.26,27 In the context of crane systems, the TID structure is employed to enhance control accuracy and resilience against nonlinear coupling effects without requiring an explicit mathematical model. The main control objective is to ensure accurate trolley and hoist positioning while effectively suppressing hook and payload sway, even in the presence of disturbances and uncertainties in the crane’s nonlinear MIMO dynamics. The general closed-loop configuration is illustrated in Figure 2, where The TID control system.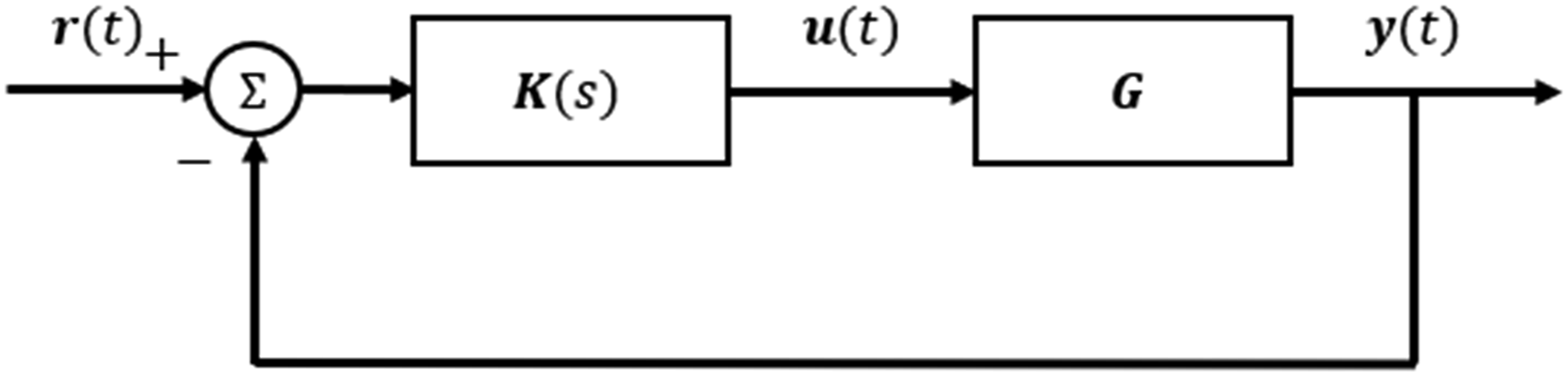
Next, the proposed TID controller is expressed in the form of a control gain matrix 

Overview of SEDA
In this section, the SEDA is introduced as the optimisation method employed for tuning the parameters of the proposed TID controller. Originally developed by Marden et al., 38 the SEDA optimisation technique is a game-theoretic approach used to explore optimal design parameters by introducing random perturbations to selected elements of the design parameter vector. Specifically, only a subset of elements of the design parameter vector is perturbed during the searching process, while the remaining elements are maintained to the current best solutions obtained so far. Since only a limited subset of elements is perturbed based on a predefined probability, the SEDA’s search mechanism exhibits a more controlled exploitation behaviour compared to conventional local neighbourhood search methods, while maintaining superior optimisation accuracy. This controlled perturbation strategy prevents excessive parameter variations between iterations, thereby improving convergence stability and reducing the likelihood of performance degradation during the controller tuning process. Furthermore, the algorithm is favoured for its simplicity, low computational cost, and strong balance between exploration and exploitation. 37 To date, the SEDA has been demonstrated to be effective for various controller tuning problems. For example, it has been successfully efficient in tuning several advanced PID controllers such as Sigmoid-based Secretion Rate Neuroendocrine–Proportional–Integral–Derivative (SbSR-NEPID), 39 NEPID, 40 Multiple-node Hormone Regulation-NEPID (MnHR-NEPID), 12 and Brain Emotional Learning-based Intelligent Controller with PID (BELBIC-PID). 41 These successful applications support the adoption of SEDA for optimising the TID controller parameters in the DPOC-DMP system in this research.
Formally, the optimisation problem is expressed as



Otherwise, increase
Implementation of SEDA for TID controller
This section outlines how SEDA is employed to adjust the TID controller parameters for the DPOC-DMP system. The primary objective of this tuning is to obtain optimal controller parameters that minimize the overall system error while ensuring smooth control effort and stable payload transfer of nonlinear DPOC-DMP systems. The algorithm structure and operation are adopted from Marden et al., 38 who originally developed the SEDA for data-driven control optimisation.
Specifically, the SEDA is employed to fine-tune all elements of TID control parameters 



Figure 3 illustrates a detailed flow diagram that integrates the tuning strategy employed for the TID controller using the SEDA optimisation method. As shown, the diagram is composed of two primary blocks. The first block represents the implementation of the TID controller for the MIMO DPOC–DMP system, while the second block highlights the operation of the SEDA-based optimisation process. The initial block focuses on reducing the fitness function Block diagram of implementation for TID controller of MIMO DPOC-DMP system.
Numerical example
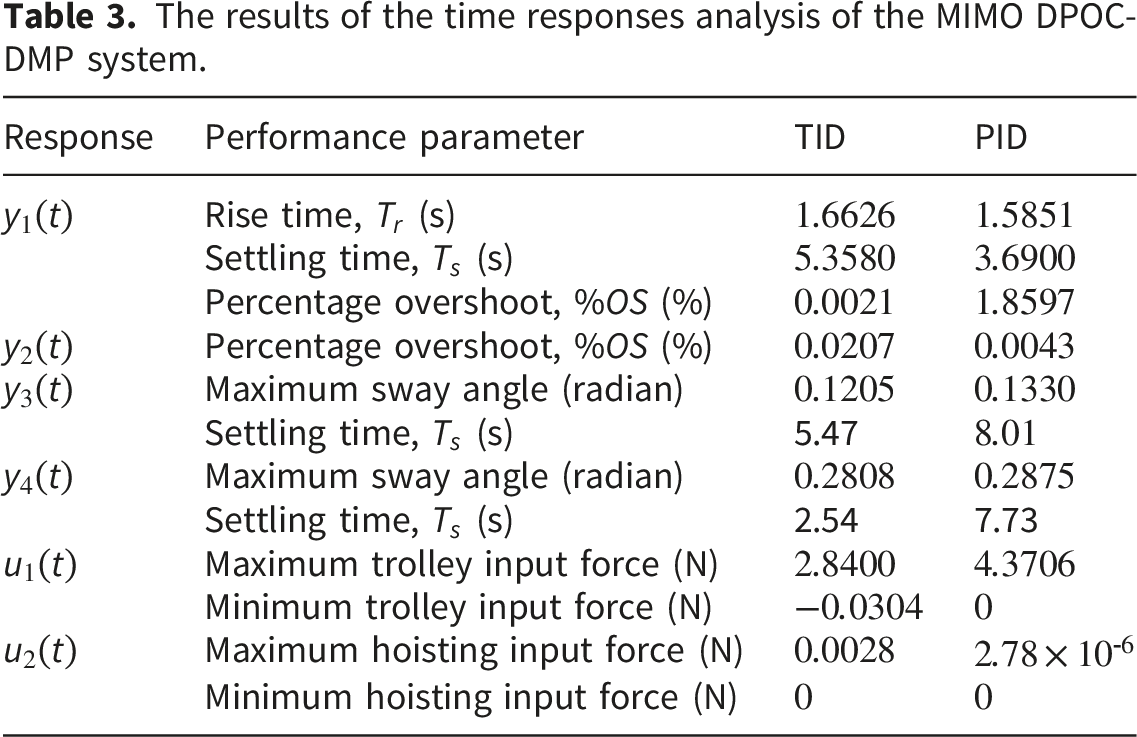
In this study, the proposed data-driven TID controller, tuned using the SEDA, was evaluated to verify its capability to improve control performance of the MIMO DPOC-DMP system. The evaluation was conducted on a nonlinear MIMO crane benchmark within the MATLAB/Simulink environment under a data-driven control framework. The proposed TID controller is implemented for the DPOC-DMP system, and its parameters were optimised using the SEDA-based tuning technique presented in the previous section. The control performance of the proposed SEDA-tuned TID controller was compared with that of a conventional PID controller, which is widely adopted as a benchmark controller for crane control applications. To provide a more comprehensive evaluation of robustness, supplementary tests were conducted in the presence of external disturbances, in which both controllers were assessed within the same simulation framework using the previously determined optimal parameters. Specifically, the following criteria were used to evaluate the effectiveness of the proposed TID controller: (i) The objective fitness function (ii) The percentage improvement in control performance (iii) The time-domain responses of the MIMO DPOC-DMP crane system obtained using the proposed SEDA-tuned TID controller were analysed and compared with those produced by the conventional PID controller. Key transient response metrics, namely rise time, (iv) The robustness of the proposed SEDA-tuned TID controller was further assessed by introducing external disturbances into the MIMO DPOC-DMP crane system. The controller’s ability to maintain stable tracking performance and suppress oscillations under disturbance conditions was compared with that of the conventional PID controller.

Next, the MIMO DPOC-DMP system illustrated in Figure 1 was examined. It consists of two control inputs 

Design parameters.
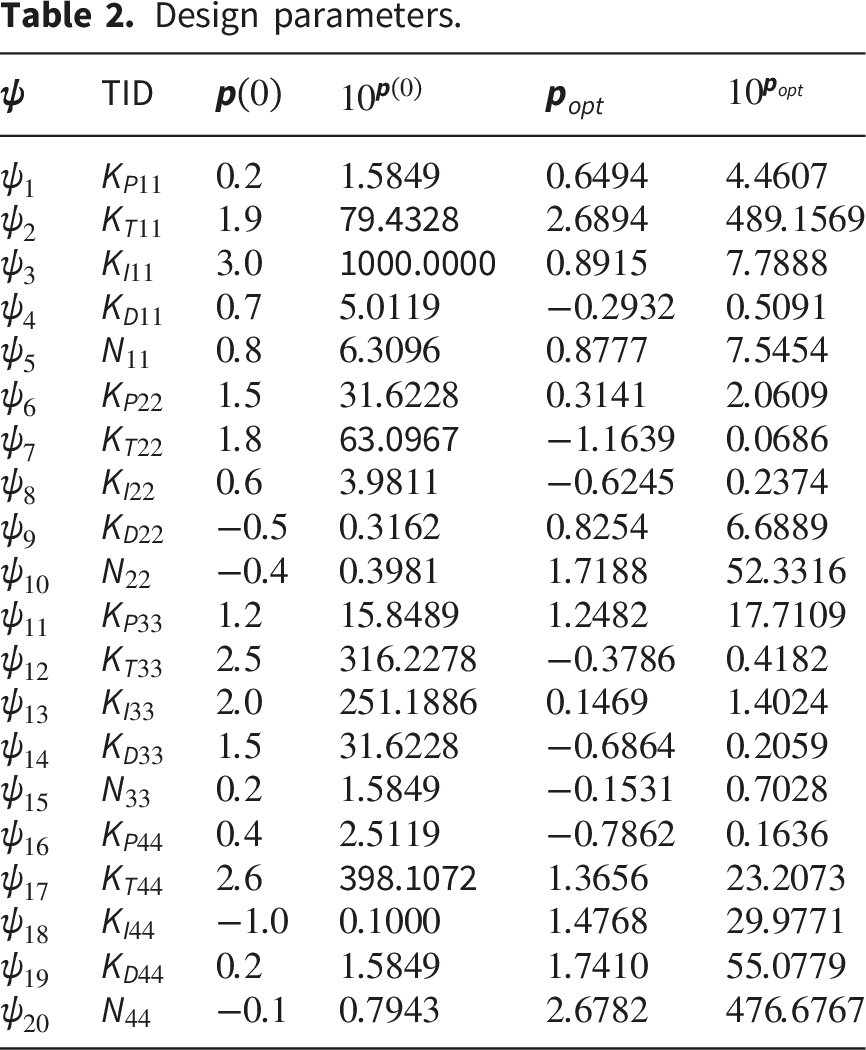
Figure 4 illustrates the convergence of the objective function The convergence curve of the objective function Trolley displacement Cable length between trolley and hook Hook sway angle Payload sway angle The trolley force, The hoist force, 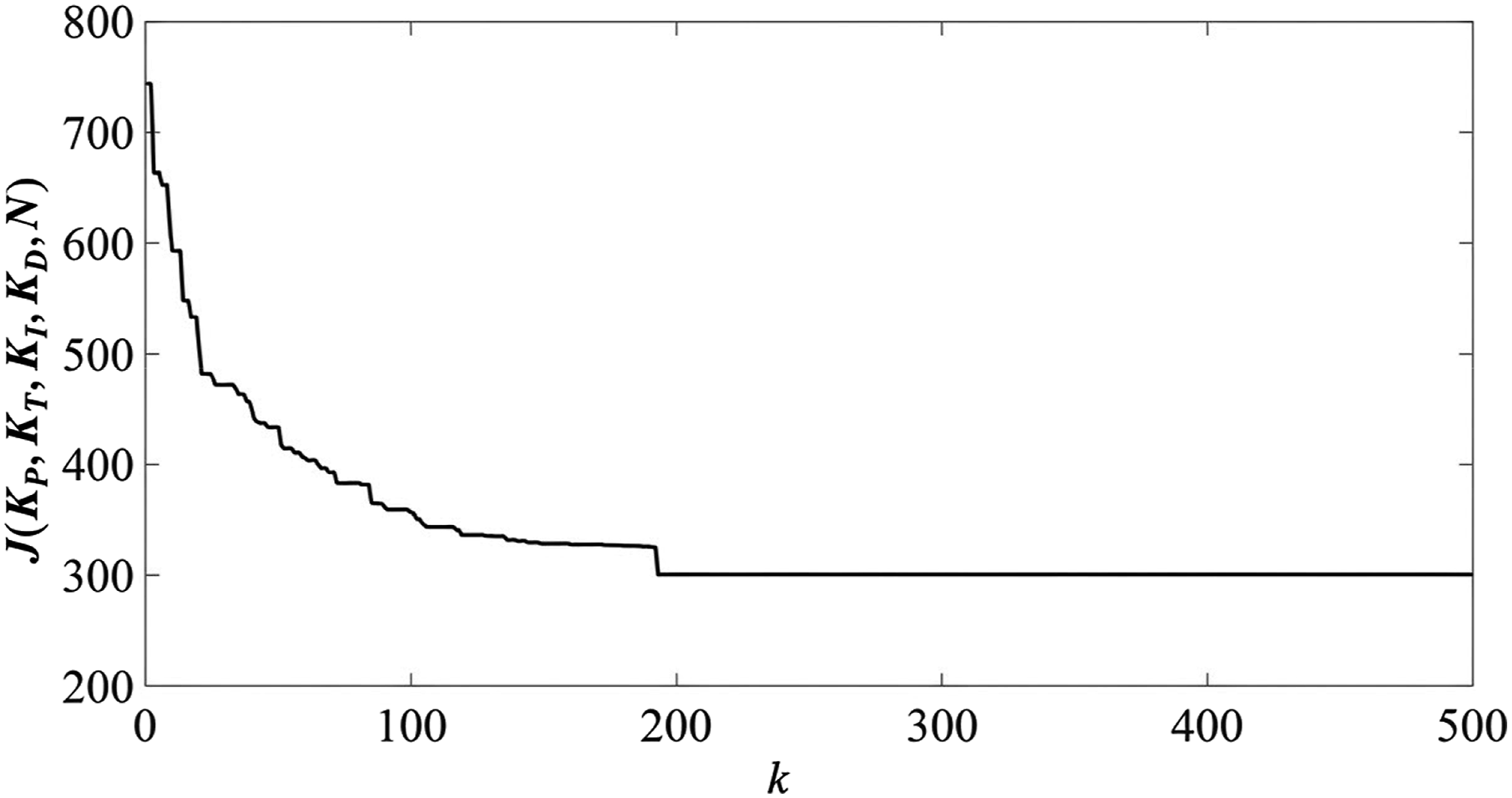

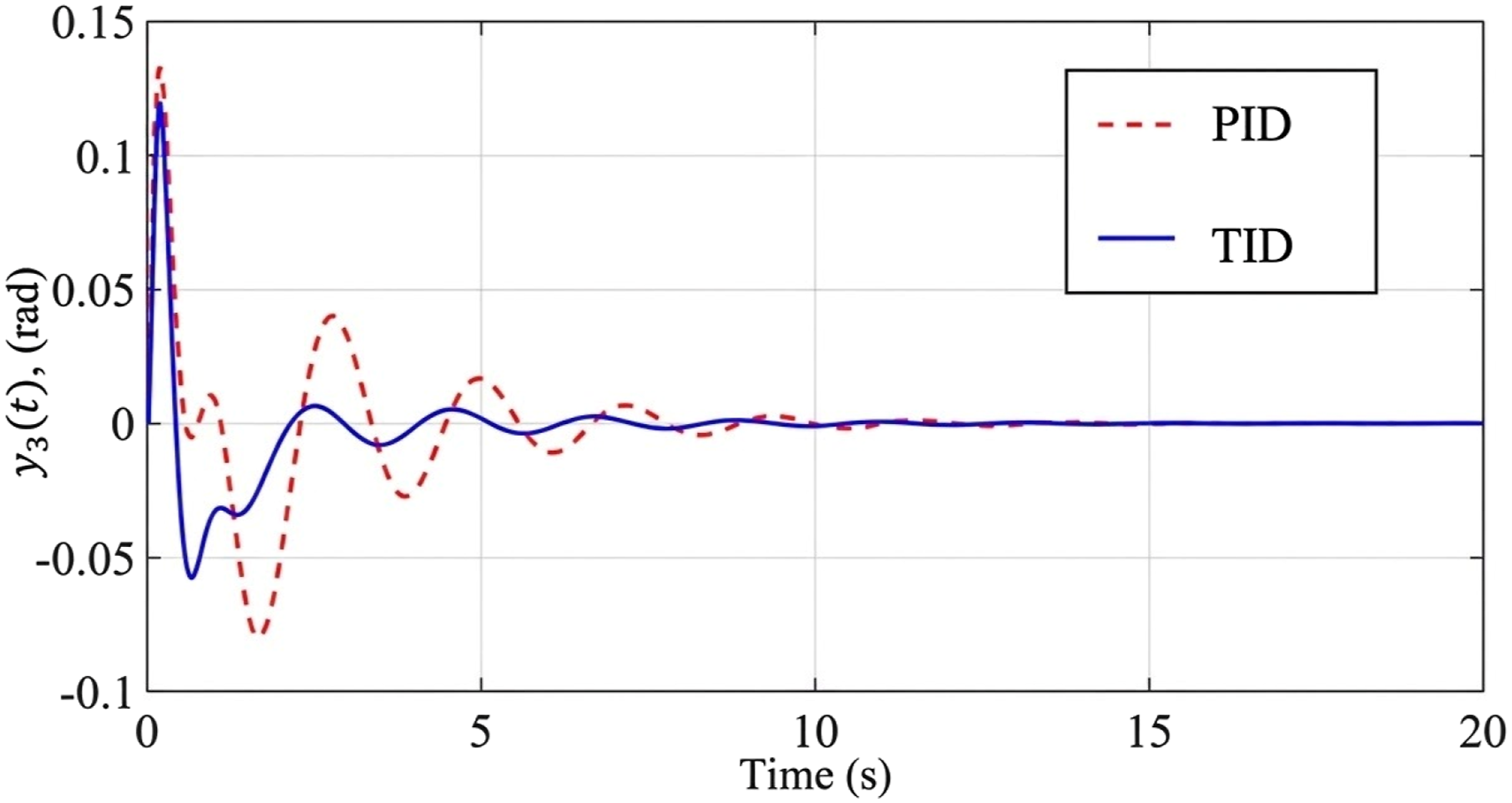
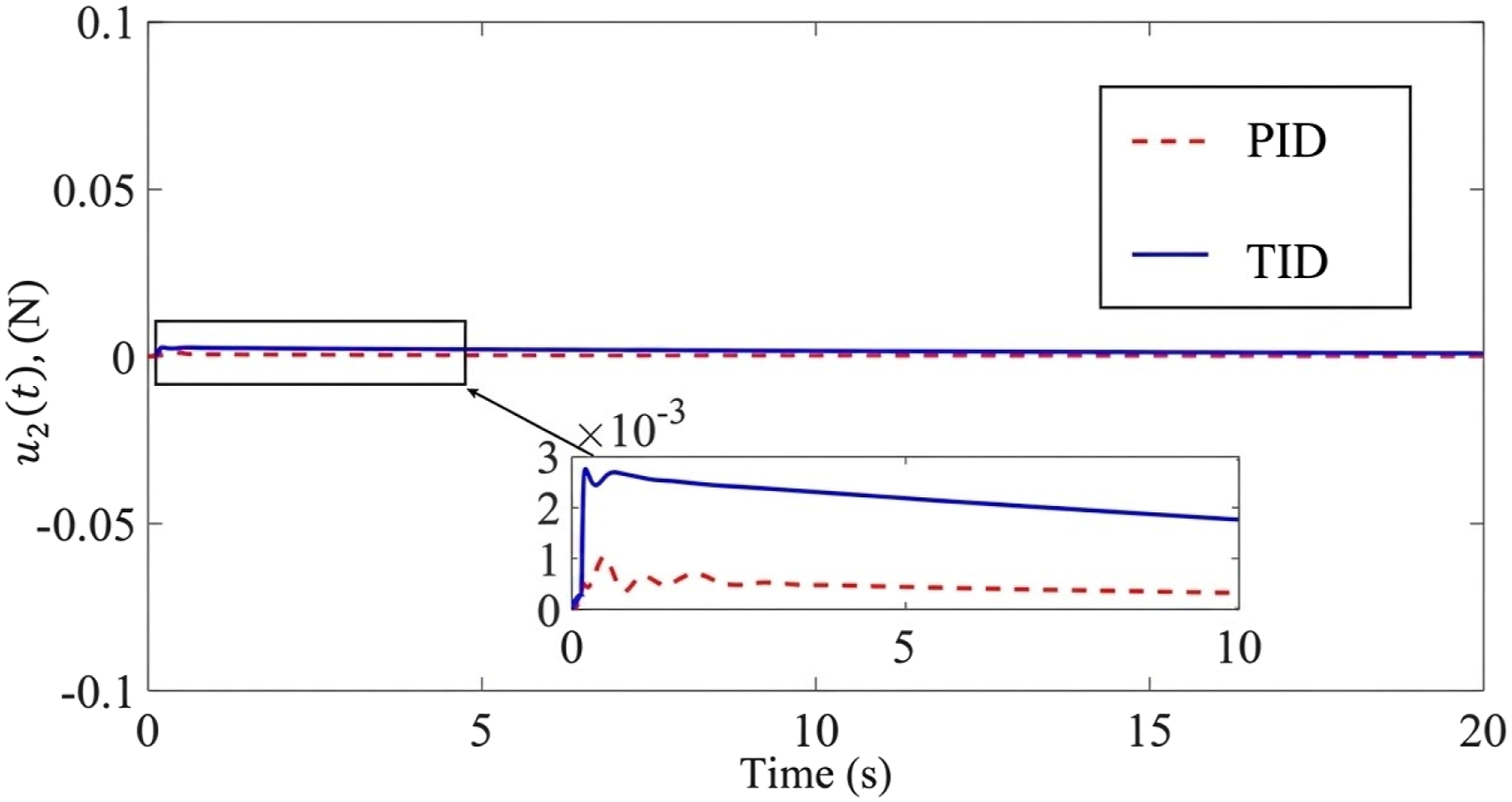
The hook sway angle
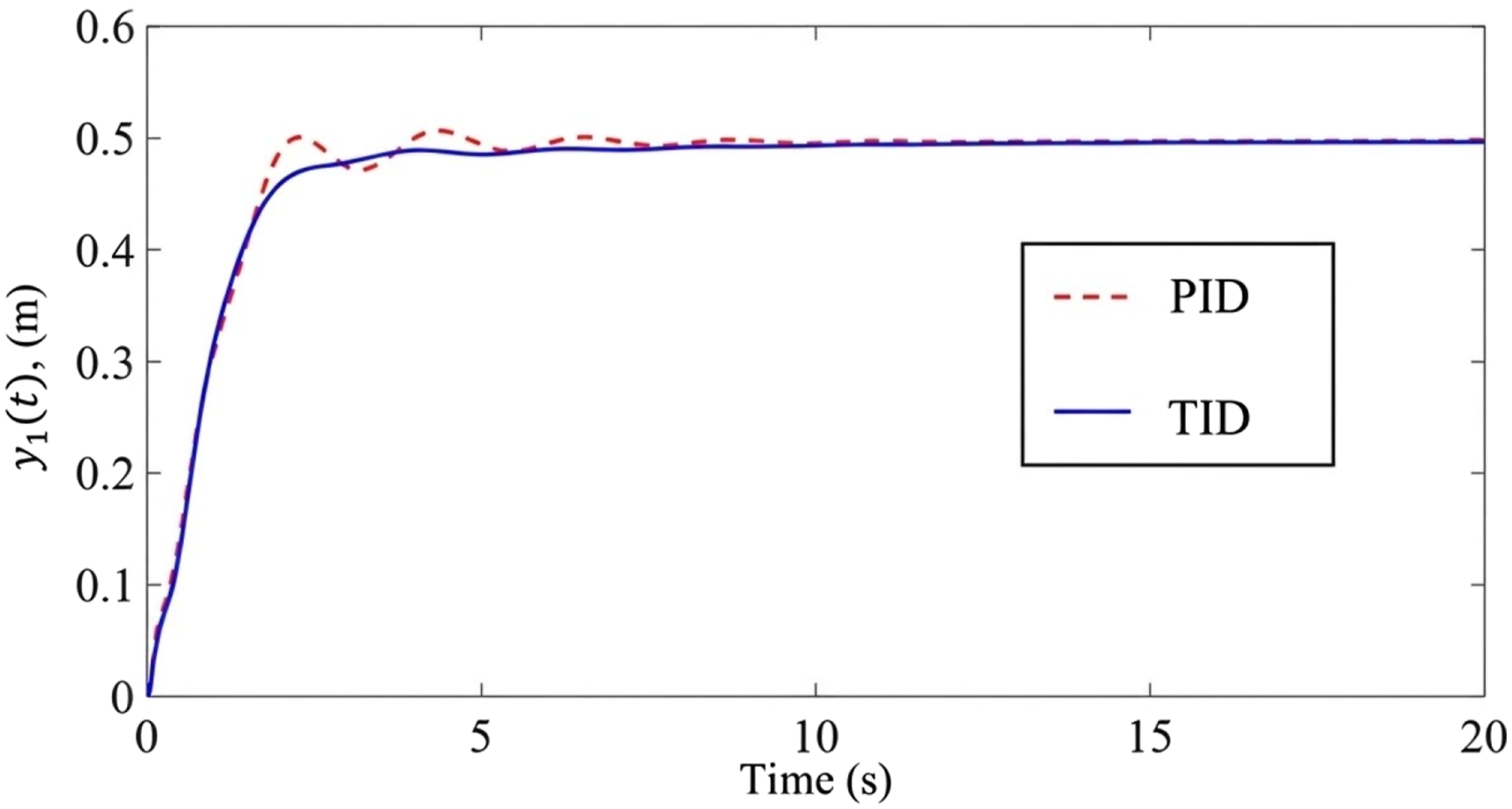
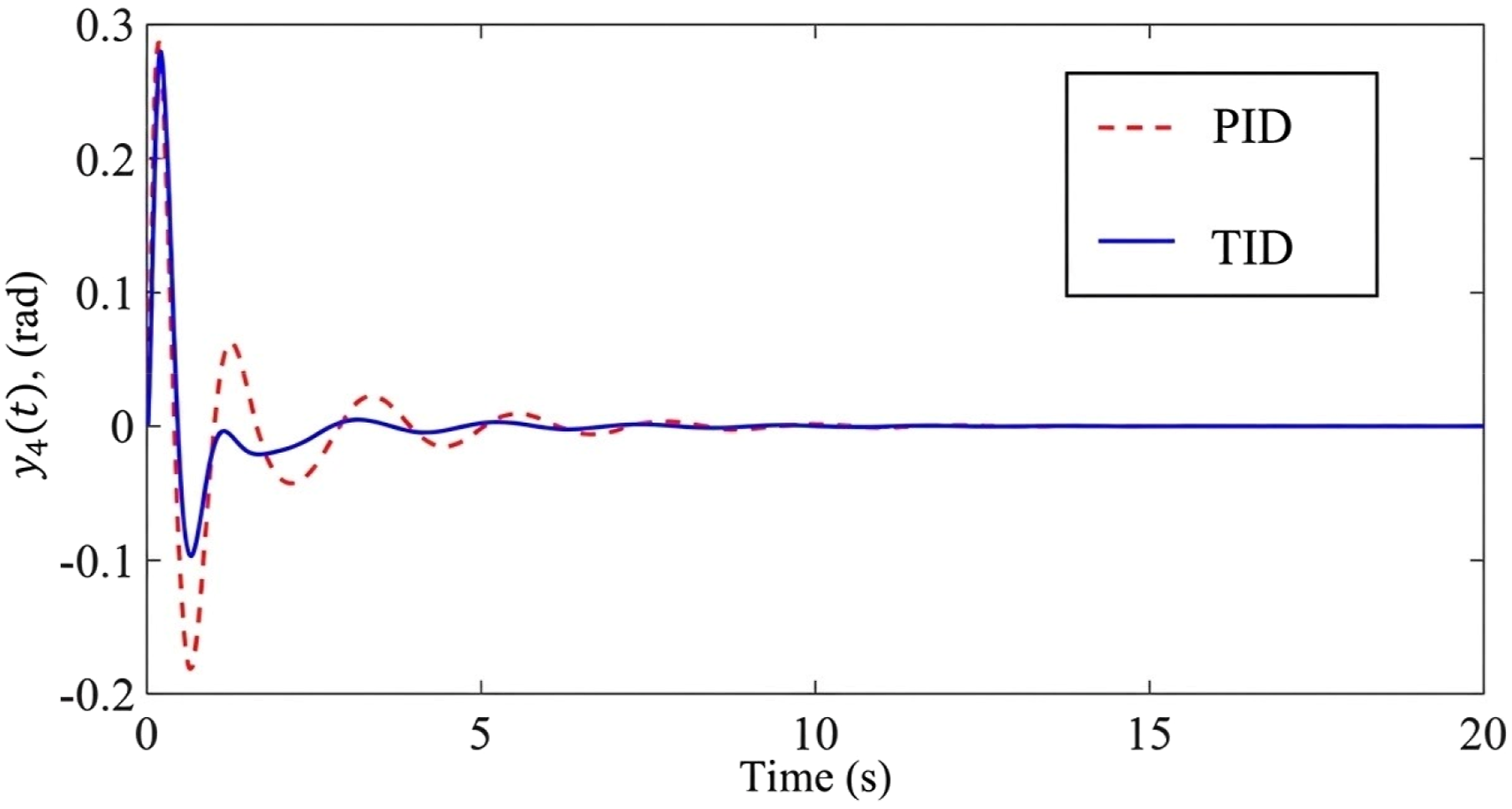
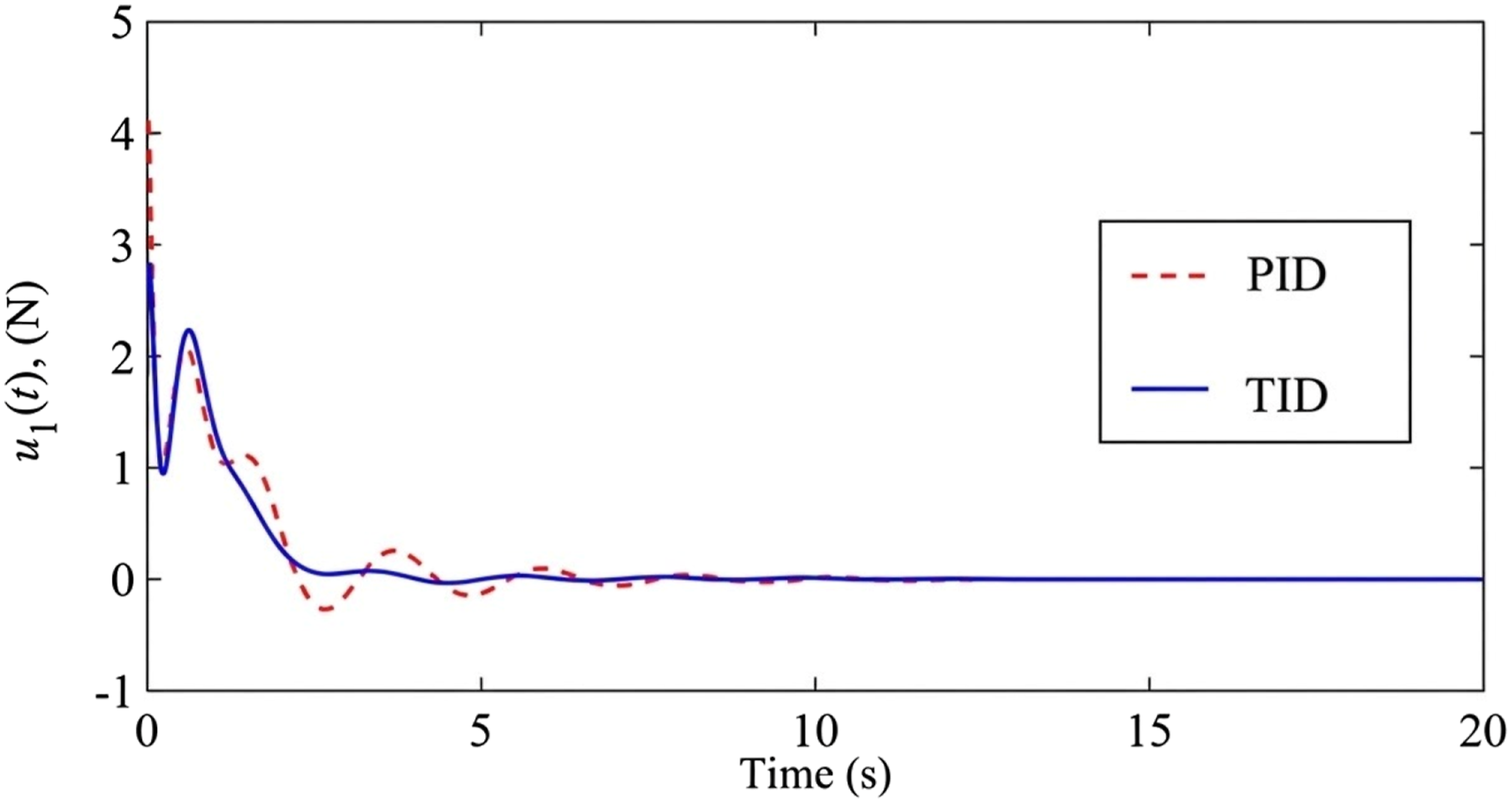
The results of the time responses analysis of the MIMO DPOC-DMP system.
Numerical result of DPOC-DMP system.
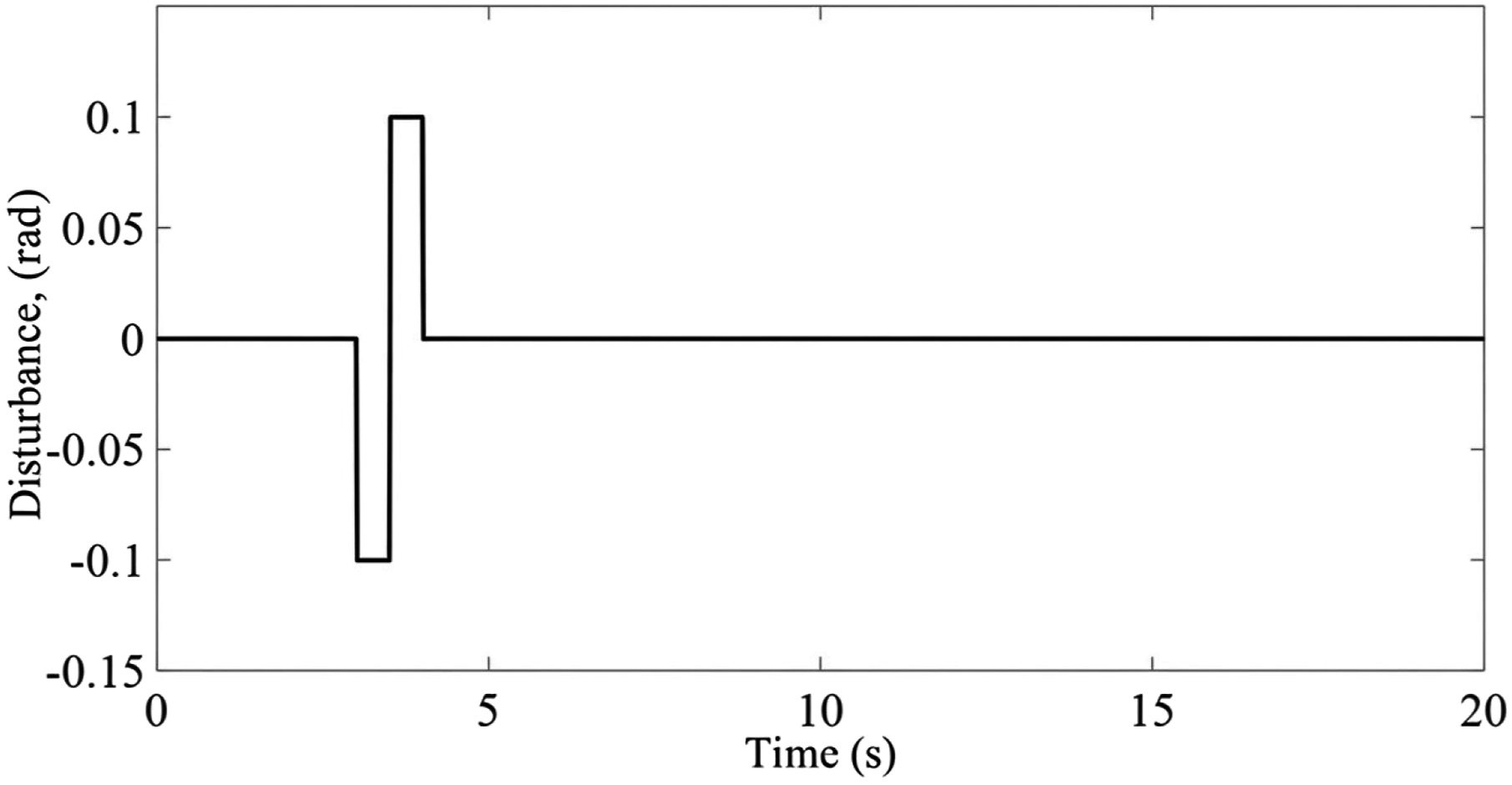
On the other hand, the robustness of the proposed data-driven TID controller, tuned via the SEDA, is further investigated under the presence of an unpredictable external disturbance in comparison with the standard PID controller. The robustness of the TID was evaluated when a disturbance Disturbance signal 
Figures 12–15 illustrate the responses of the trolley displacement Trolley displacement with disturbance Cable length between trolley and hook with disturbance Hook sway angle with disturbance Payload sway angle with disturbance 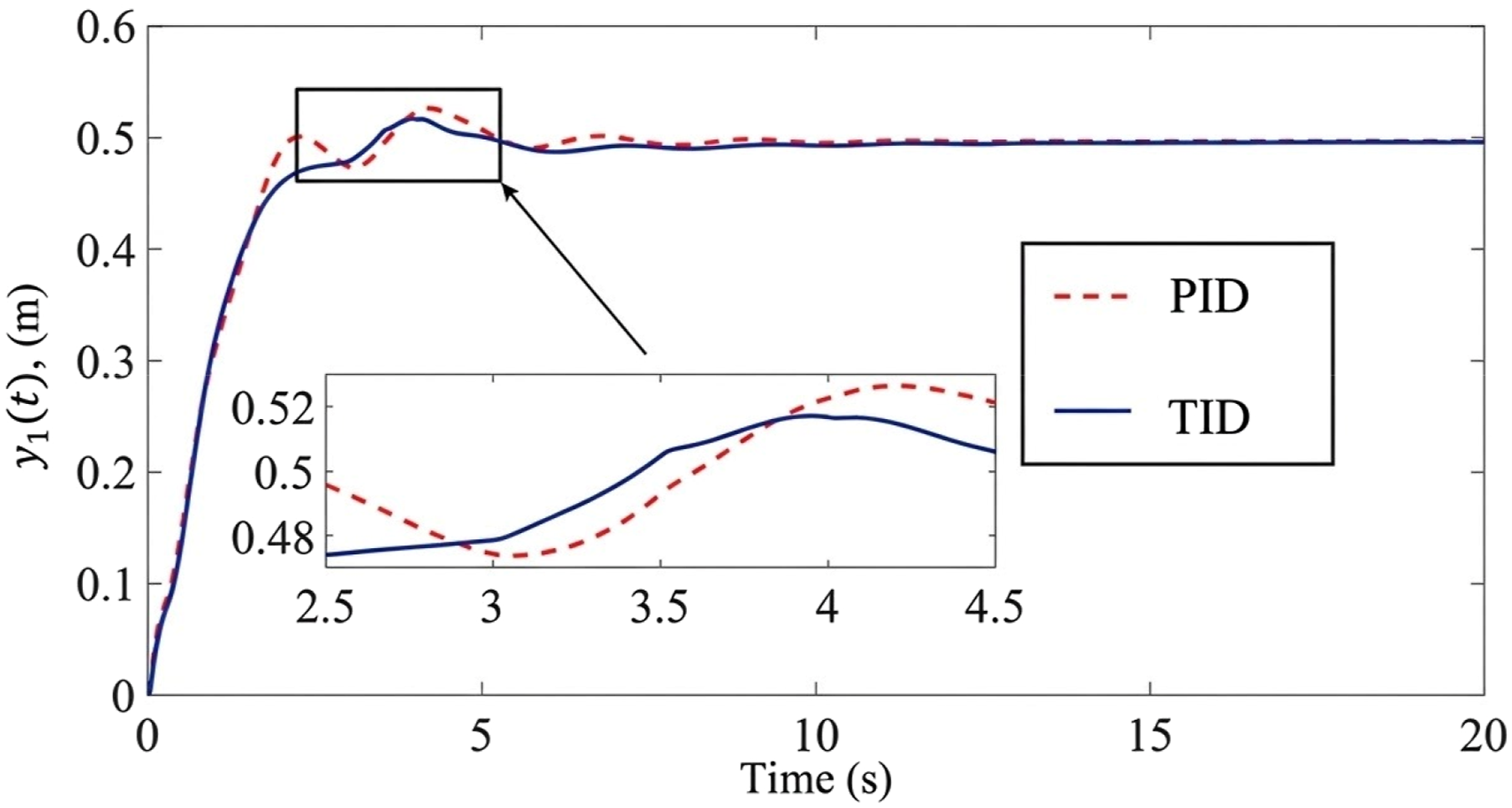
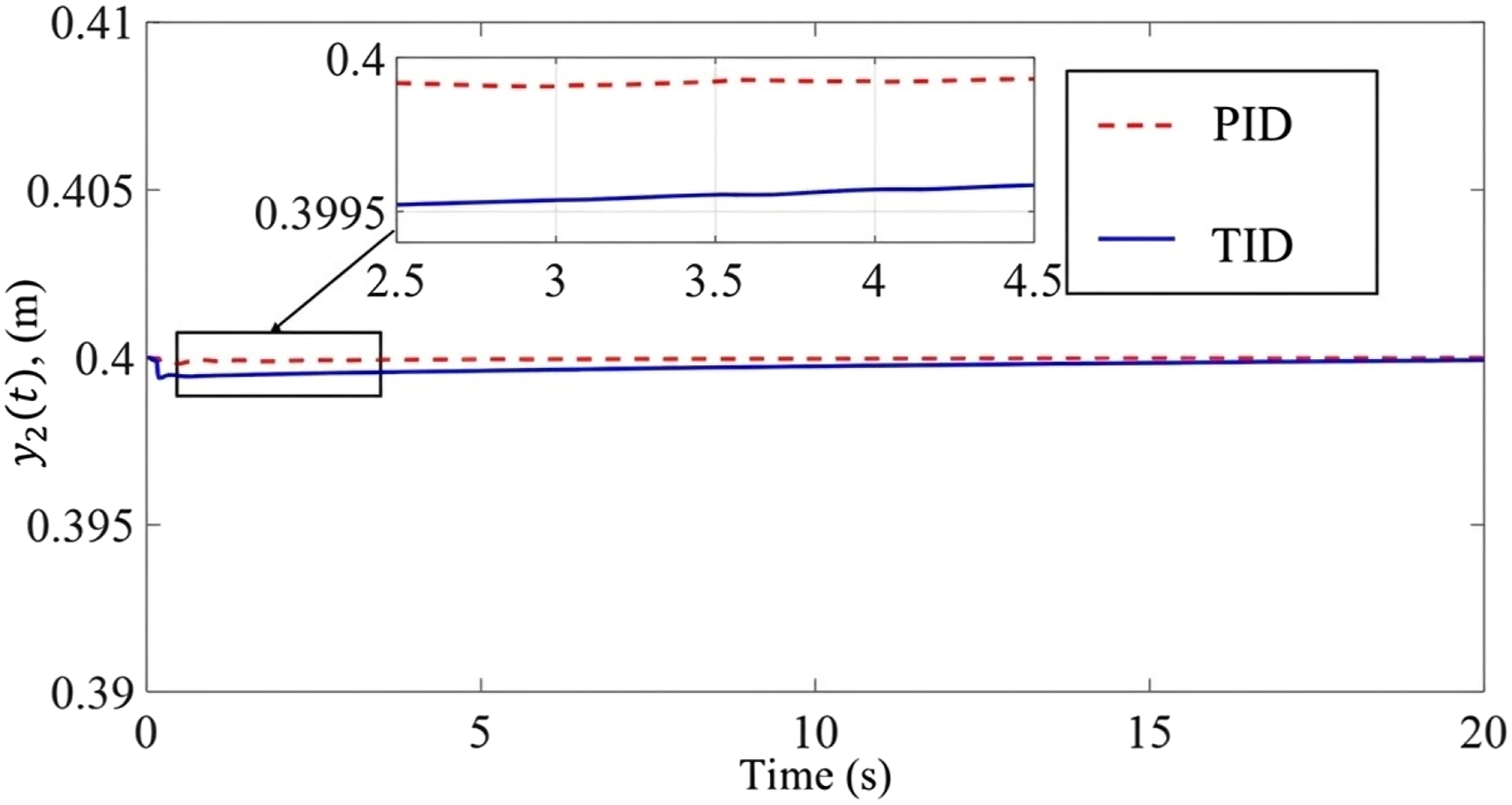
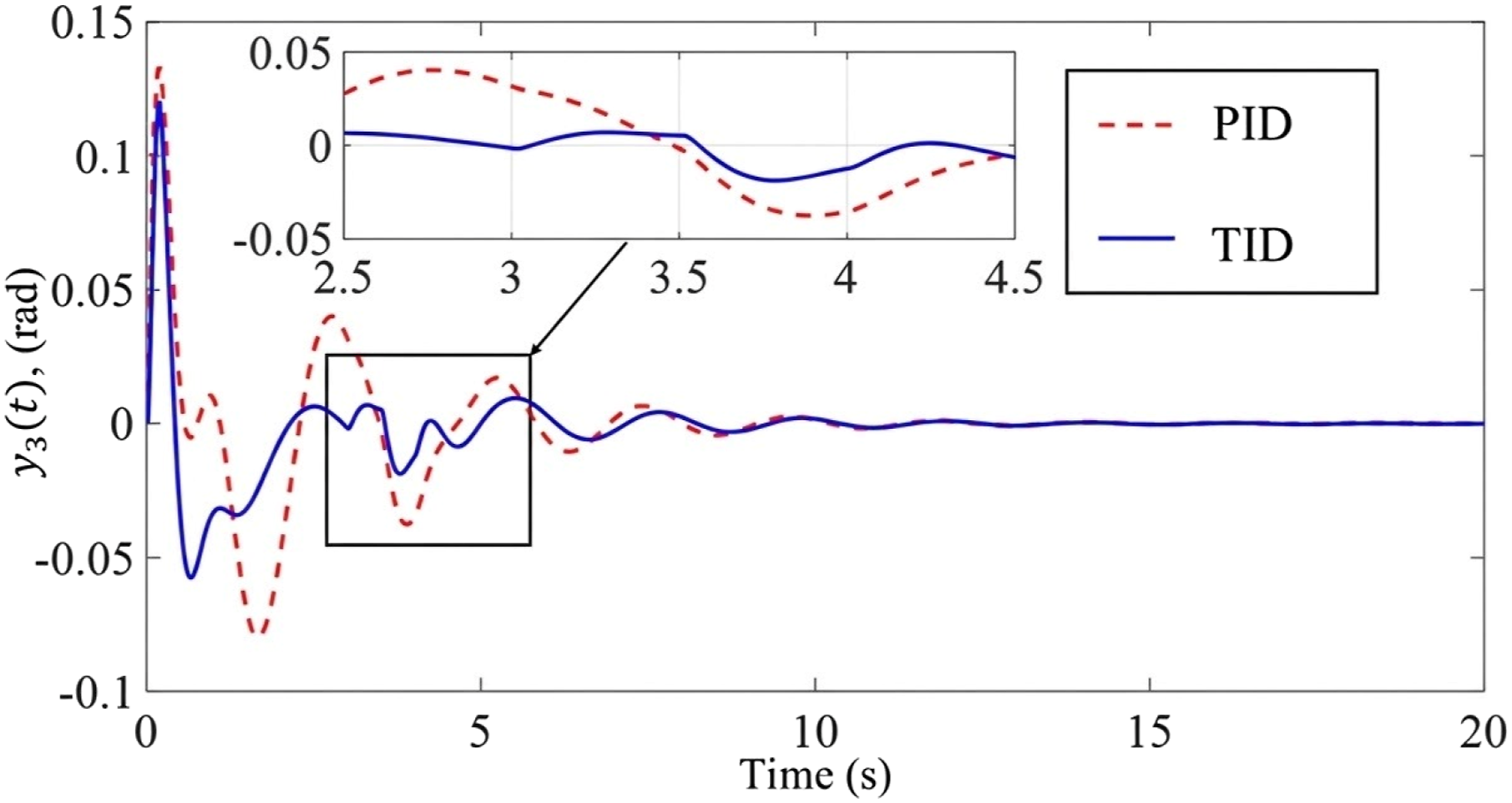
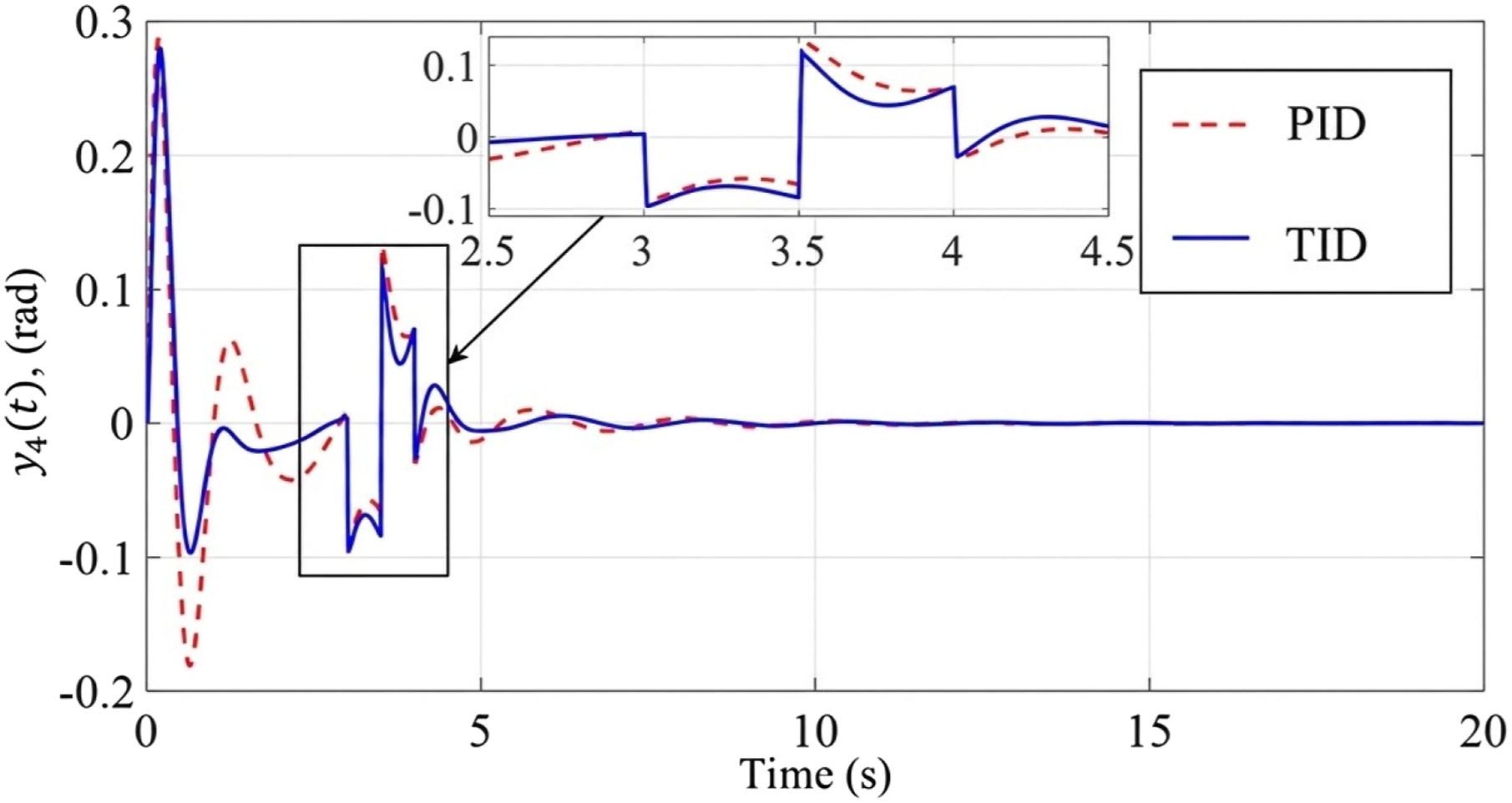
The obtained results highlight the capability of the proposed data-driven interconnected TID controller in handling the nonlinear MIMO overhead crane system with distributed mass payload. Compared with the conventional PID controller under identical conditions, the proposed approach achieves improved tracking accuracy, reduced sway angles, and lower control input energy, as reflected by the smaller objective function value. These improvements demonstrate the effectiveness of the data-driven tuning approach in capturing the system dynamics without requiring an accurate mathematical model. The proposed control strategy shows strong potential for practical implementation in industrial overhead crane operations such as manufacturing lines, automated warehouses, construction material handling, and port container transportation, where accurate positioning and effective sway suppression are essential for operational safety and efficiency. In addition, the data-driven tuning framework is particularly suitable for real-world crane systems where model uncertainties, parameter variations, and nonlinear coupling effects make conventional model-based controller design difficult. Overall, the results confirm that the proposed data-driven interconnected TID controller provides a practical and superior alternative to conventional model-based and PID control approaches for nonlinear MIMO overhead crane systems with distributed mass payload.
Conclusion
This paper presented a data-driven TID controller for the nonlinear MIMO DPOC–DMP crane system, tuned using the SEDA algorithm. Simulation results demonstrated that the optimised TID controller achieved a lower objective function value (310.6951) compared to the PID controller (326.4870), corresponding to an improvement of 2.82% in overall control accuracy. The proposed controller also reduced the total tracking error from 0.1720 to 0.1619 and decreased the total control input energy from 4.3902 to 3.9647, indicating improved control efficiency. In addition, the TID controller provided better suppression of hook and payload sway angles with smoother transient responses and faster settling under both nominal and disturbance conditions. These results confirm that the proposed data-driven TID–SEDA framework is effective in enhancing tracking performance, reducing oscillations, and improving robustness for nonlinear MIMO crane systems with distributed-mass payloads. Future work will focus on extending the proposed framework to a multi-objective optimisation setting to simultaneously balance multiple performance criteria such as tracking accuracy, control effort, and robustness. In addition, experimental validation on a real crane testbed will be pursued to further assess the practical feasibility of the proposed approach. The versatility of the proposed TID–SEDA framework allows for potential extension to a broad range of nonlinear and coupled MIMO systems where high-precision oscillation damping and robust positioning are critical. In electric drive systems, the framework could optimise speed and torque control in electric vehicles to handle varying load conditions and improve energy efficiency. For robotic manipulators, specifically those used in medical surgeries or high-speed manufacturing, the SEDA-tuned TID controller can enhance path-tracking accuracy while suppressing mechanical vibrations. Furthermore, in aerial vehicles, such as quadrotors or delivery drones, the strategy can be applied to maintain stable flight attitudes and payload stability under unpredictable wind gusts and aerodynamic disturbances. Future investigations will focus on adapting the safe-experimentation mechanism of SEDA to these real-time operational constraints to ensure both performance and safety across these diverse platforms.
Footnotes
Acknowledgement
The highest gratitude is especially extended to the Universiti Malaysia Pahang Al-Sultan Abdullah for the financial assistance provided under the MTUN Strategic Collaboration Research Grant, RDU243501. Also special thanks to the Ministry of Higher Education for the financial assistance provided under Fundamental Research Grant Scheme (FRGS) No. FRGS/1/2024/TK07/UMP/03/1 (University reference RDU240101).
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Universiti Malaysia Pahang Al-Sultan Abdullah (RDU243501) and Malaysia Ministry of Higher Education (FRGS/1/2024/TK07/UMP/03/1).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.