
Abstract
This study demonstrates an acceleration-based virtual sensing (VS) approach for estimating low-frequency vibrations in a commercial air-conditioning compressor unit. Frequencies corresponding to the fundamental rotational frequency (1f) of the compressor and its higher harmonics up to the sixth harmonic (6f) dominate the spectrum and are tied to reliability issues in piping, yet are difficult to monitor due to the system’s geometric complexity. A linear Kalman filter (KF) was implemented under a zero-input assumption (u = 0) during quasi-steady intervals, explicitly avoiding reliance on high-fidelity finite-element (FE) models or known excitations. A speed-sweep test on a full-scale outdoor unit was conducted; estimated accelerations were benchmarked against independent measurements using a cross signature scale factor (CSF). With the observation noise parameter α fixed at 100 and the process noise parameter β tuned, the method achieved an average CSF of 0.79 (0–200 Hz), while capturing the dominant resonance near 122 Hz and overall trends despite model discrepancies. These results indicate that accurate low-frequency vibration estimation is feasible with limited sensors and imperfect FE models, supporting scalable diagnostics and predictive maintenance in HVAC equipment and other vibration-sensitive products.
Introduction
Low-frequency noise and vibration in commercial air-conditioning compressor units have become a significant concern in both residential and industrial environments, as they are inherently difficult to mitigate using conventional sound-absorbing treatments. Unlike higher-frequency components, low-frequency structural responses propagate efficiently through mechanical paths and radiate with limited attenuation, often bypassing typical enclosure or insulation measures. International noise regulations for HVAC equipment vary across jurisdictions. Nevertheless, there is broad demand to reduce low-frequency emissions to improve acoustic comfort and meet tightening environmental standards. In particular, frequency components corresponding to one to six times the compressor’s rotational frequency (1f–6f) are of interest, as they often dominate the low-frequency spectrum and are closely associated with vibration-induced reliability issues such as fatigue cracking and contact wear. Similar issues have been reported in HVAC compressors, where low-frequency noise due to internal impacts was mitigated using semi-active control strategies. 1
During product development, accurate evaluation of vibration and stress in refrigerant and water piping systems is essential to ensuring both structural integrity and acoustic performance. However, the complex geometry, numerous connection interfaces, and distributed nature of the piping network make full-field vibration measurements impractical. Incident reports from regulatory and safety agencies in Japan over the past two decades2–5 have documented multiple cases of vibration-induced pipe failures, highlighting the urgent need for diagnostic and monitoring techniques capable of operating with limited sensor coverage.
Virtual sensing (VS) based on Kalman filtering has been widely applied to estimate unmeasured states from sparse measurements combined with models.6–8 Its effectiveness has been validated on simple structural elements such as beams, frames, and acoustic enclosures,9–16 and in rotating machinery and vibroacoustic applications.17,18 However, most existing VS approaches assume either known excitations or high-fidelity FE models—assumptions rarely satisfied in full-scale industrial products. Recent contributions in JLFNVAC1,19–21 have addressed low-frequency vibration and compressor diagnostics, yet the challenges of unknown inputs and imperfect FE models remain largely unresolved. In practice, full-system FE models of HVAC equipment inevitably require simplifications—such as idealized joint stiffness, local flexibility approximations, or lumped-mass elements—resulting in frequency-dependent discrepancies. 22 To address these uncertainties, this study applies acceleration-based VS using a linear KF, under a zero-input (u = 0) assumption during quasi-steady intervals. This assumption, previously validated in simplified structures, is here extended to a full-scale outdoor unit as a product-level validation under realistic industrial conditions.
From an industrial perspective, failures such as pipe fatigue or joint loosening lead to costly downtime and warranty claims.2–5 To address this challenge, the present study applies an acceleration-based linear KF to a fully assembled outdoor air-conditioning compressor unit—a structurally complex product with bolted joints, rubber isolators, and multiple coupled substructures—operating under partially unknown excitations.
The robustness of the proposed method is evaluated by combining experimental sweep tests with a full-system FE model containing realistic structural simplifications. Performance is benchmarked against independent acceleration measurements using the Cross Signature Scale Factor (CSF) metric, 23 with systematic tuning of noise parameters to optimize accuracy. The findings show that reliable low-frequency vibration estimation is achievable for structurally complex systems under realistic industrial conditions, underscoring the potential of acceleration-based VS as a diagnostic tool for condition monitoring and predictive maintenance in HVAC and other vibration-sensitive equipment.
Theory of virtual sensing
Overview of the state-space model
The mechanical behavior of the system is described using a state-space representation derived from the governing finite-element equation of motion. Assuming a single-input, multiple-output (SIMO) system, the dynamics can be written as




To reduce computational cost, modal reduction is applied. The displacement vector
Kalman filtering for virtual sensing
To estimate unmeasured states such as accelerations or stresses at inaccessible locations, this study employs a discrete-time KF. The continuous-time model introduced in Section “Overview of the state-space model” is discretized using a zero-order hold on the inputs, and the corresponding matrices (
The KF operates recursively through two steps: prediction and correction. In the prediction step, the state vector and its error covariance are propagated using the discrete system matrices27,28:


The Kalman gain is then computed as




This recursive scheme provides an efficient framework for fusing limited acceleration measurements with reduced-order FE models. Importantly, the process noise parameter
Zero-input assumption for industrial application
In this study, the input
Here, we extend this assumption to industrial equipment where coupled substructures, bolted joints, and isolators introduce model uncertainties. The aim is to demonstrate that accurate low-frequency vibration estimation remains feasible for complex, large-scale systems under realistic operational conditions without explicit input force information. A successful validation on the outdoor unit would further suggest applicability of the method to a broad range of vibration-sensitive industrial products.
Experimental equipment and analytical model
Test configuration
The test object was the outdoor unit of a commercial air-conditioning compressor, chosen as a representative example of a structurally complex and vibration-sensitive product. Figure 1(a) shows the external view, while Figure 1(b) indicates the location of the internal accelerometer used for validation. The sensor measured vibration at the marked position as the compressor speed was swept from 20–110 rps over a 45 s interval. Experimental setup for vibration measurement of the compressor unit.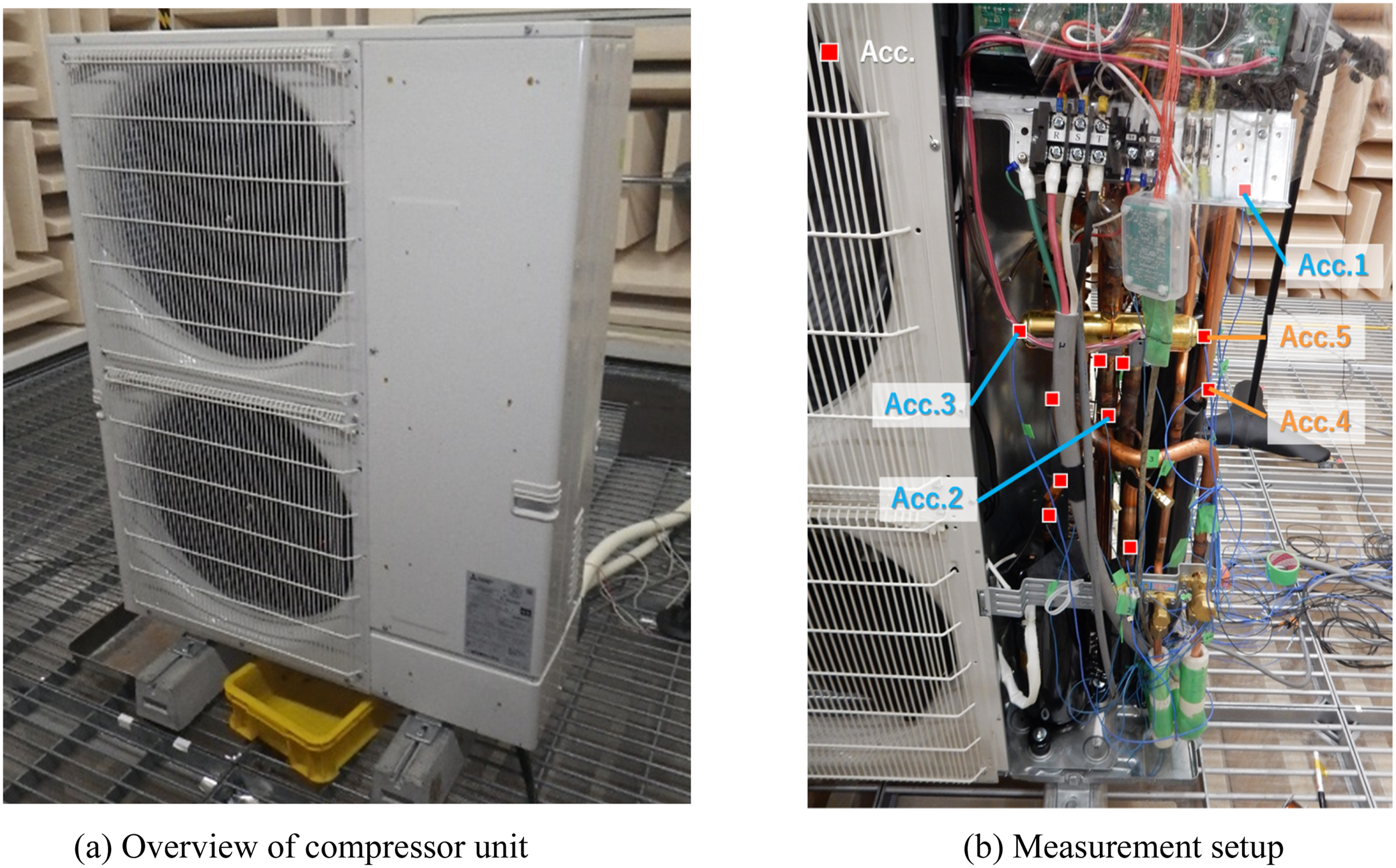
No external shaker was employed; instead, the experiment relied on self-excitation generated by the compressor operation. This sweep test procedure is widely used in the HVAC industry and in other rotating machinery such as electric motors, as it excites a broad range of structural modes under conditions representative of real-world operation.
In service, compressors usually operate at discrete fixed speeds (e.g., high-cooling or energy-saving modes), producing weaker dynamic excitation than the sweep scenario. The chosen test therefore represents a stringent validation case for the proposed vibration estimation method, while also illustrating its applicability to a broader class of industrial machinery.
Analytical model
Finite-element model
A full-system FE model was developed under the same physical configuration as the tested unit (Figure 2). The compressor and fan motor were represented as lumped masses, the rubber isolators as bushing elements, the heat exchanger as solid elements, and the remaining structural parts as shell elements. The assembled model comprised 267,740 nodes and 332,812 elements. FE model of the compressor unit showing different isometric views for clarity.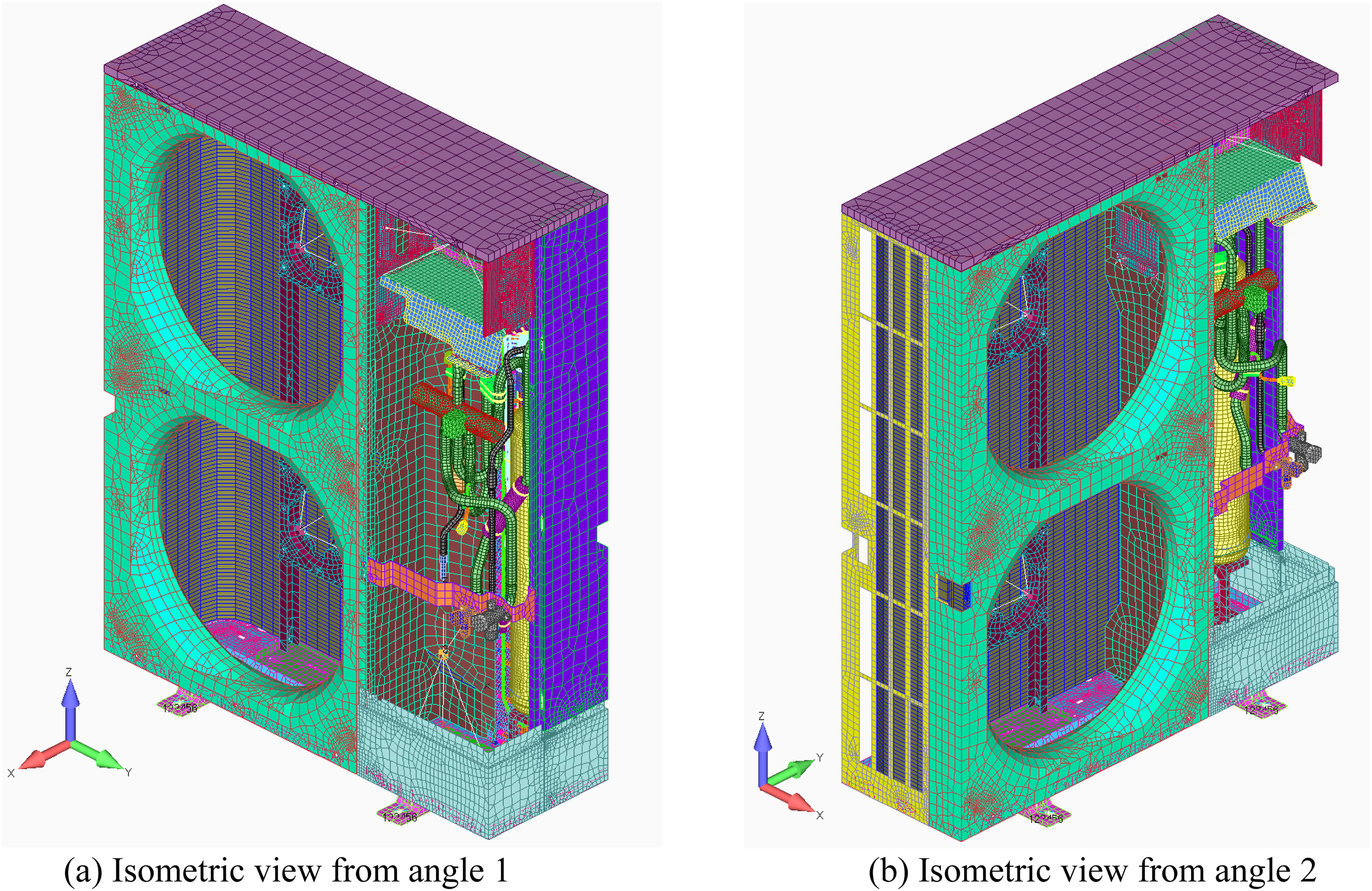
To capture the dynamic behavior up to 200 Hz, a modal reduction was applied. The first 315 modes were retained, ensuring coverage of the frequency range of interest, and used to construct the reduced-order modal truncation matrix for the state-space formulation.
Assessment of model accuracy
The accuracy of the FE model strongly affects the performance of KF-based virtual sensing. To evaluate this accuracy, frequency response functions (FRFs) obtained from the FE model were compared with experimental measurements at two representative locations: one near the excitation source (Figure 3(a)) and another at the furthest point (Figure 3(b)). Measurement and analysis points selected for FRF comparison in the compressor unit.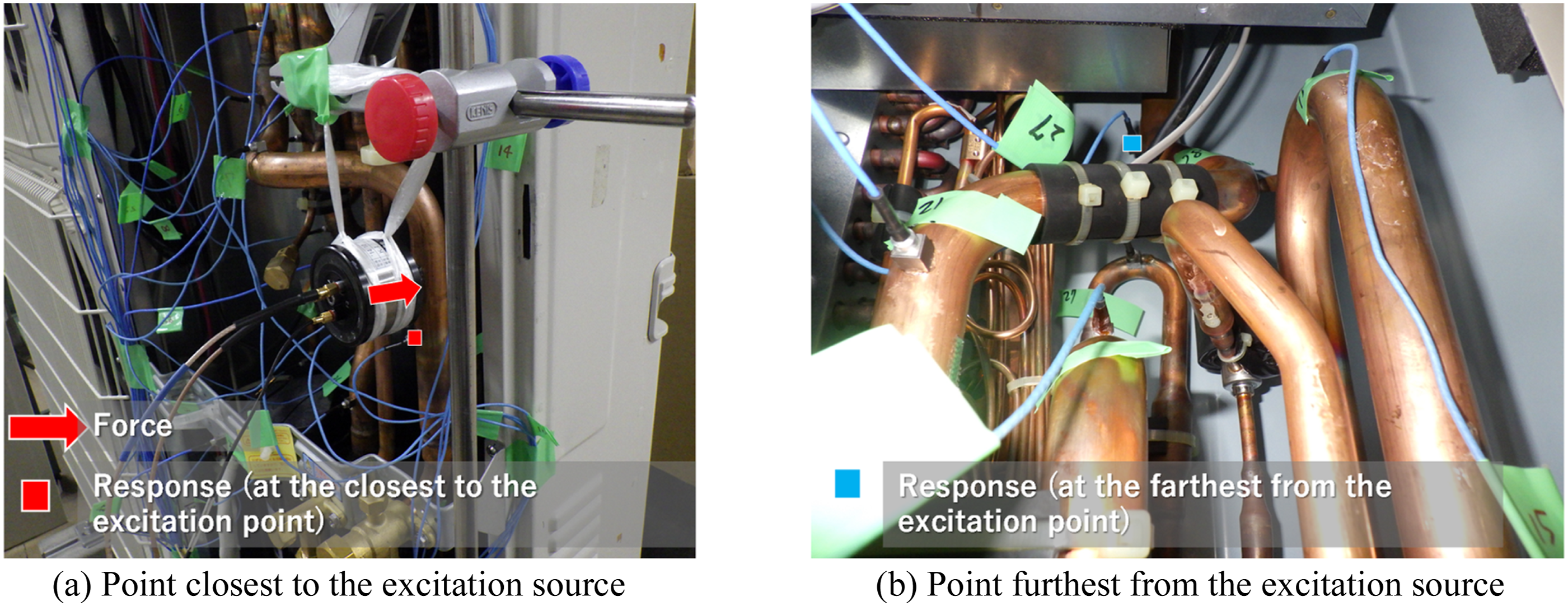
For the near location, Figure 4(a) shows that the FRF in the X-direction agrees closely with the measurements except for a deviation near 10 Hz. Larger discrepancies appear in the Y- and Z-directions, particularly around 10 Hz and within the 60–100 Hz range, reflecting the effects of structural complexity, unmodeled joint compliance, and model simplifications. At the far location (Figure 4(b)), the overall FRF trend is captured, but notable frequency-dependent errors remain. These discrepancies highlight the inherent limitations of full-system FE models while raising the central question of this study: whether KF-based VS can still provide reliable vibration estimates under such model uncertainties. Comparison of FRFs between measurements (black solid line) and FE model calculations (red solid line) at the points indicated in Fig. 3.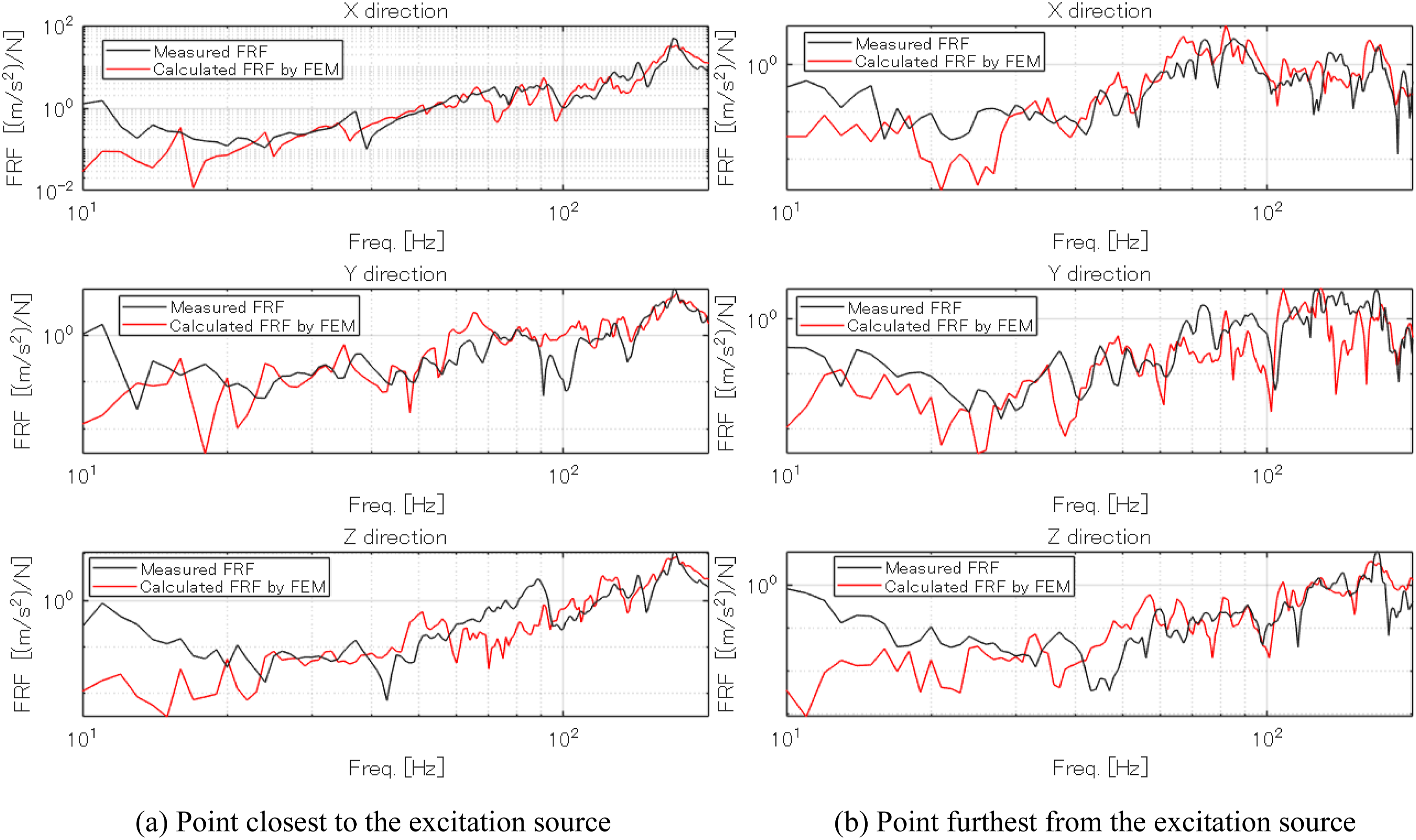
Validation of virtual sensing for vibration estimation accuracy
The performance of the proposed VS approach was validated by comparing estimated accelerations with independent measurements at selected verification points. The accelerometer configurations are shown in Figure 5. Eight accelerometers were used as observation sensors (KF inputs), while five additional accelerometers were reserved exclusively for validation. Sensor configurations for VS implementation and accuracy assessment.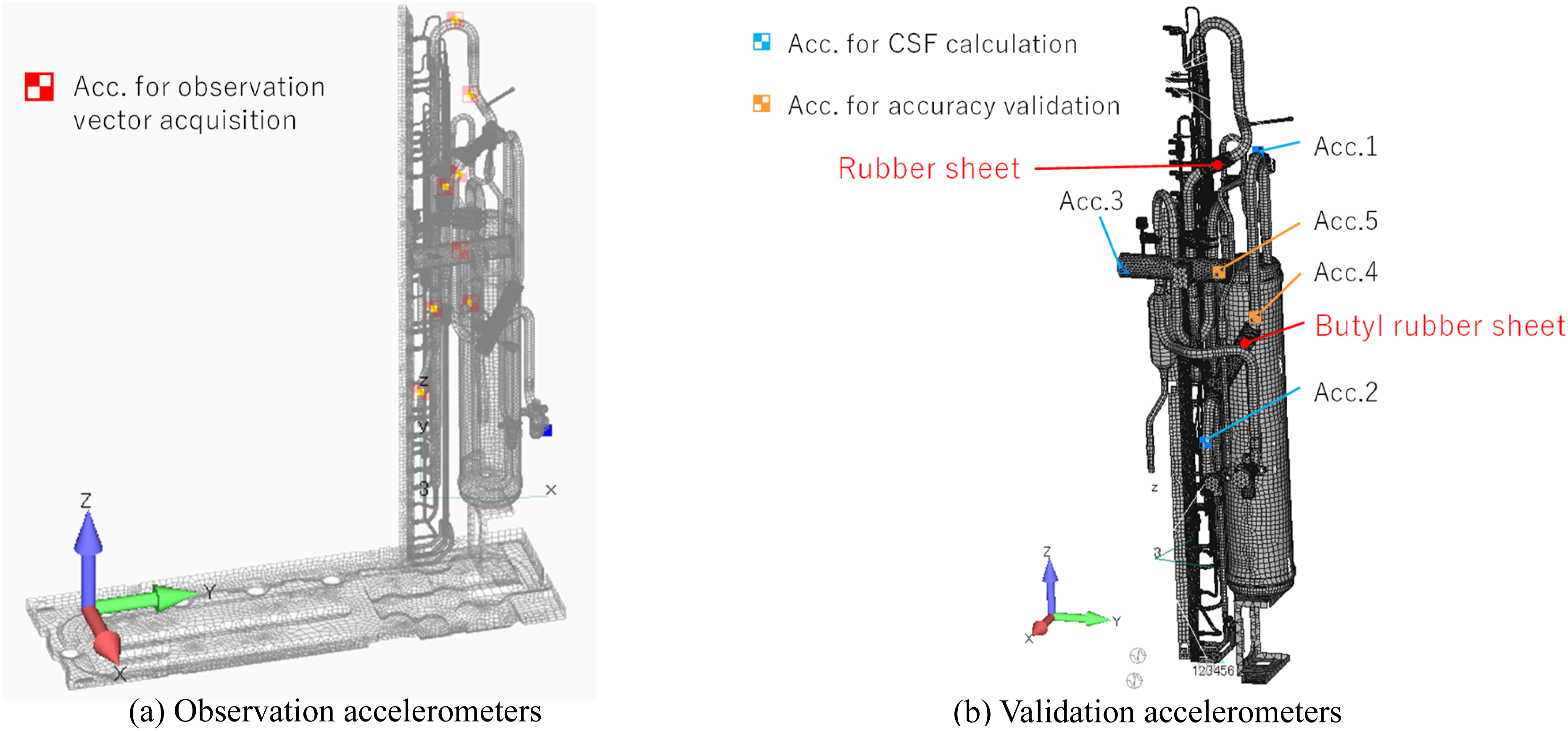
Parameter tuning
The influence of the KF noise parameters
Accuracy evaluation metric
To quantify estimation accuracy, vibration data spanning 86 s—including transitional phases before and after speed changes—were processed. The peak acceleration spectrum was obtained from 1,000 FFTs using peak-hold averaging.
As the objective is amplitude accuracy rather than phase reconstruction, the CSF 23 was adopted. While CSF is traditionally applied to FRFs, in this study it is extended to response spectra, enabling a direct comparison between measurements and VS predictions without relying on input-output relationships.
The average CSF was computed across three validation points, corresponding to Acc.1–Acc.3 in Figure 5. The relationship between CSF and Relationship between CSF and noise parameters (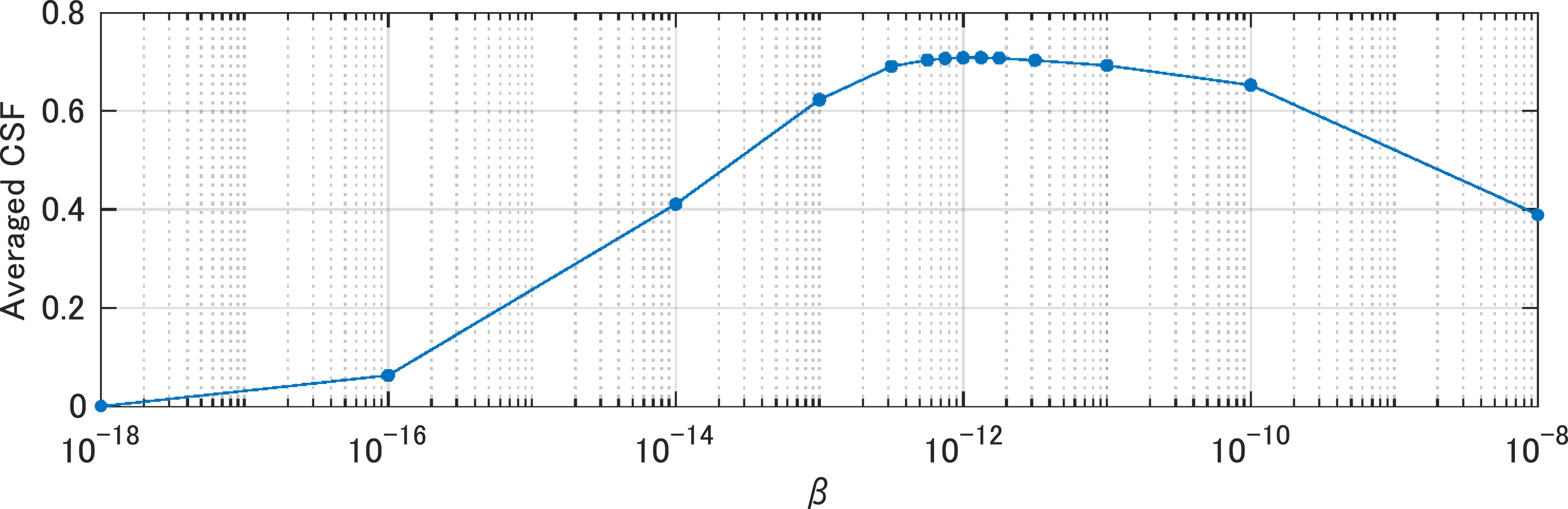
Estimation results under quasi-steady conditions
During the 45 s sweep, the change in compressor rotational speed was sufficiently gradual to approximate the response as steady state over short intervals. Accordingly, the KF was applied under the zero-input assumption (u = 0).
Figures 7 and 8 show the measured and estimated responses at Acc. 4 and Acc. 5 (see Figure 5) using the optimal parameter Comparison of acceleration spectra (black: measured; red: VS-estimated). Comparison of acceleration time histories (black: measured; red dotted: VS-estimated).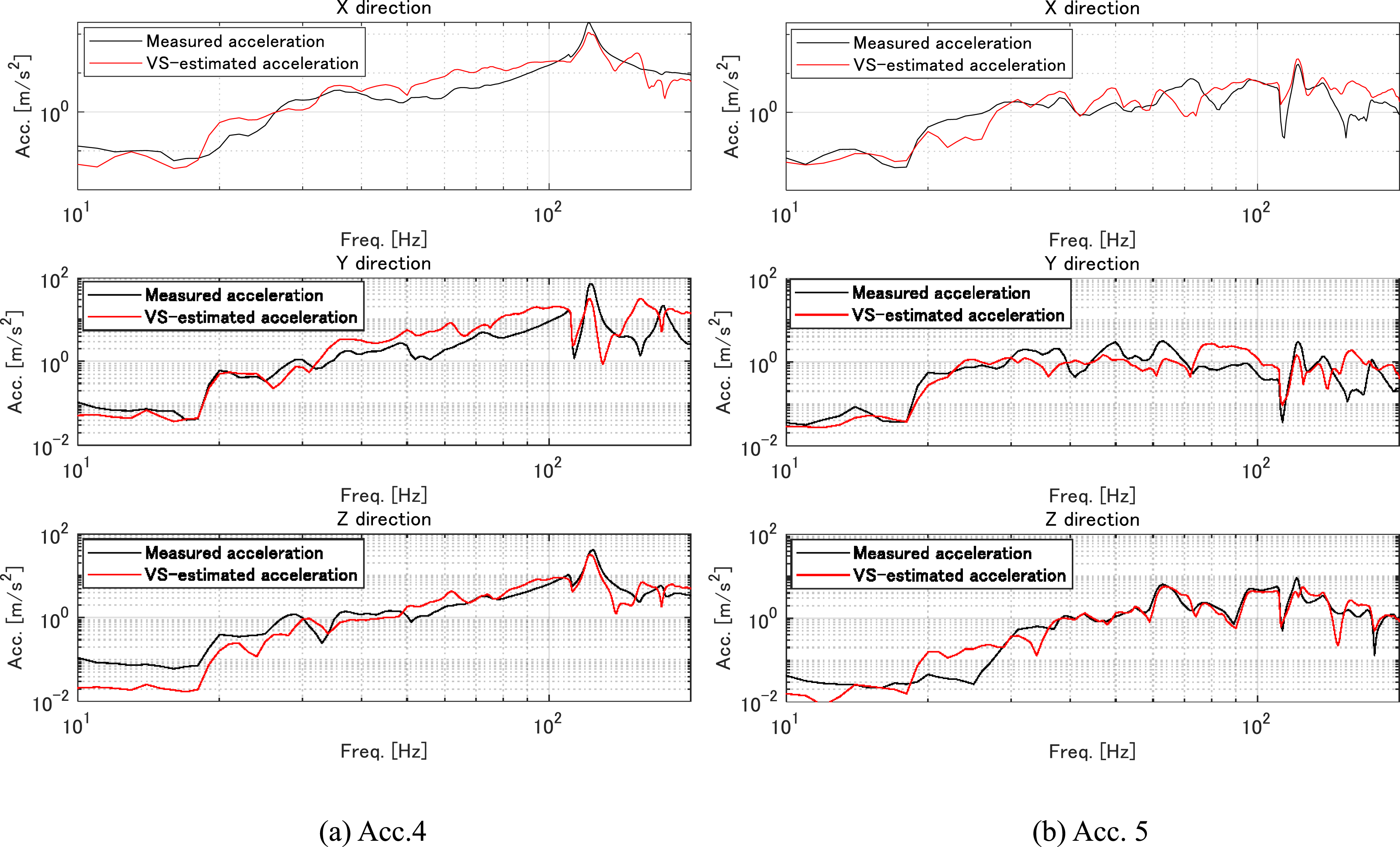
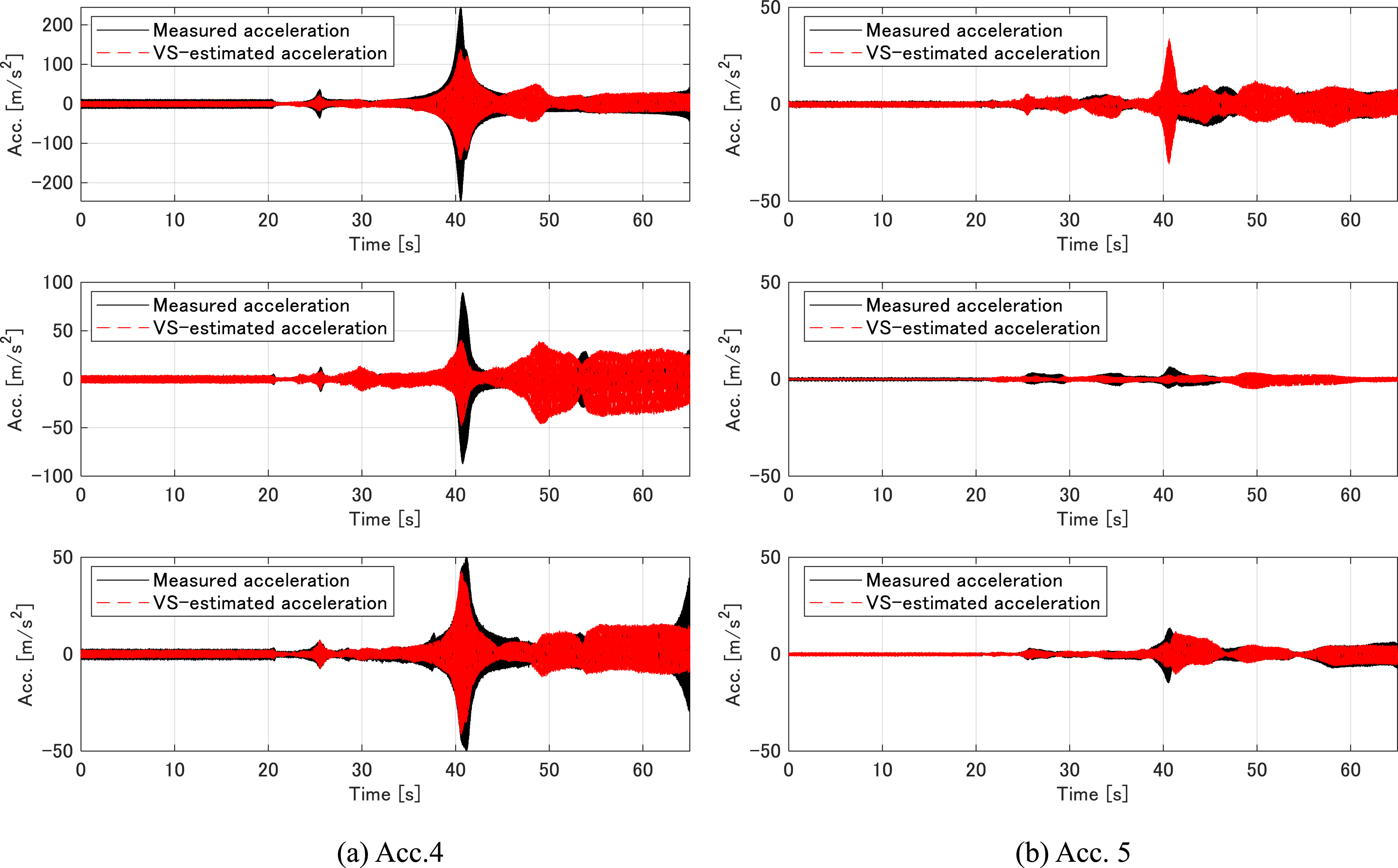
The agreement between measured and estimated responses indicates consistent robustness. Across the 0–200 Hz range, the average CSF was 0.79, with values at individual validation signals ranging from 0.68 to 0.87. This indicates consistently meaningful correlation despite model uncertainties. At the dominant resonance near 122 Hz, the estimated amplitude deviated from the measured value by 43%, yet the resonance peak location and overall trend were accurately captured. Time-domain traces overlapped closely, confirming that the KF-based VS not only reproduces global resonance characteristics but also fine-scale temporal dynamics. Such robustness, demonstrated despite significant FE model discrepancies, highlights the practical reliability of the proposed method. These results confirm that acceleration-based VS can provide sufficiently accurate low-frequency vibration estimates for industrial applications, even under substantial model uncertainty.
The KF used in this study operates as shown in Eq. (10), where the state vector is sequentially corrected using acceleration measurements at the observation points to estimate the modal coordinates
Spatial vibration distribution
To further illustrate the system behavior, Figure 9 shows the spatial distribution of VS-estimated vibration amplitudes at t = 40.9 s, corresponding to the dominant resonance near 122 Hz. Localized resonances are visible in the side panel and along sections of the piping network, consistent with expected structural mode shapes. These distributions provide additional evidence that the VS method can capture not only global vibration levels but also spatial features relevant to fatigue-sensitive regions. Spatial distribution of VS-estimated vibration amplitudes at t = 40.9 s (dominant resonance at 122 Hz).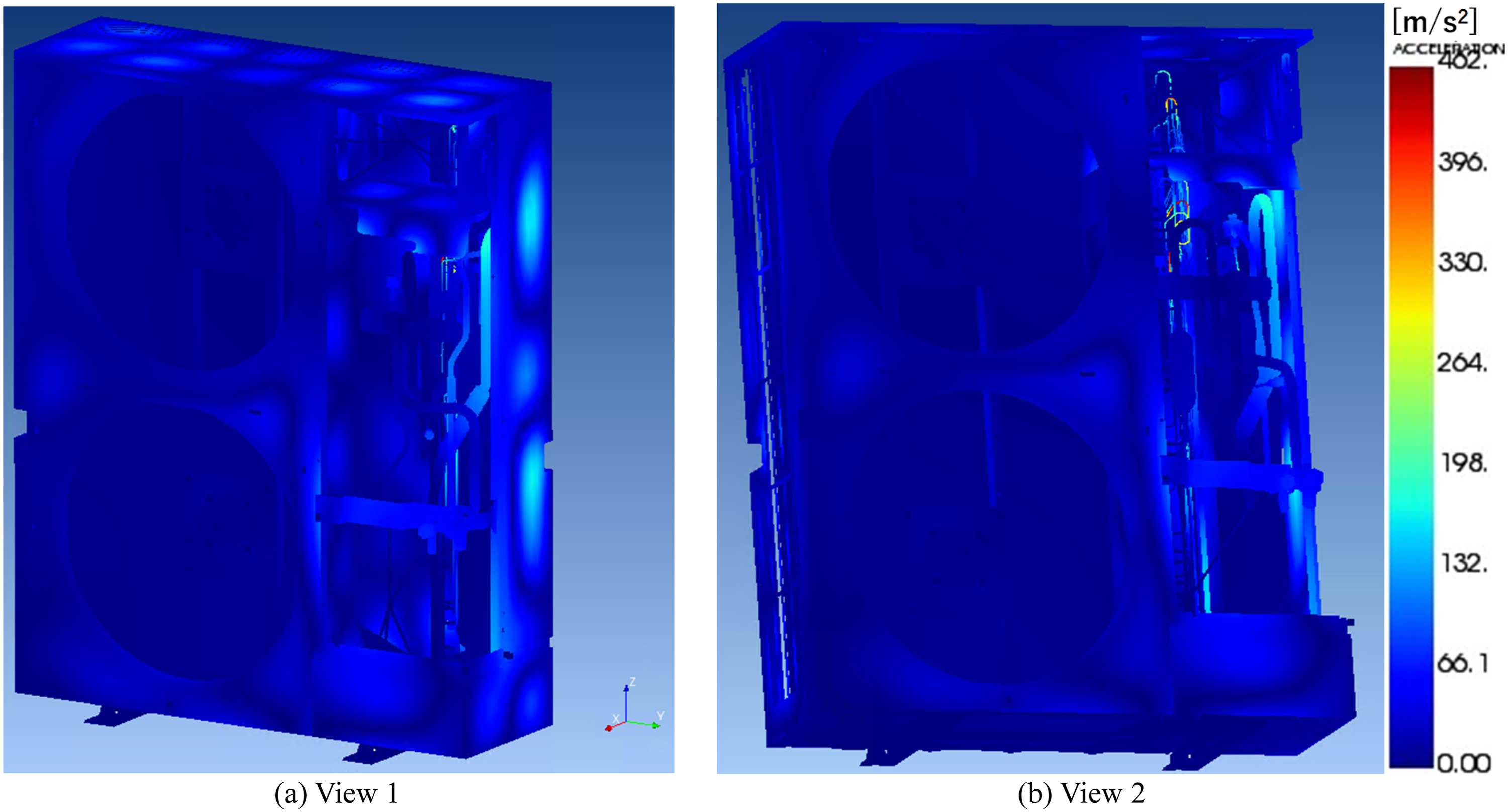
Summary of findings
The validation results confirm that the proposed VS method can reliably estimate dominant resonances and overall vibration trends in a structurally complex industrial product, even under quasi-steady operating conditions and with significant FE model uncertainties. Importantly, the ability to achieve accurate estimates without relying on high-fidelity models highlights the robustness of the approach for practical low-frequency vibration monitoring in HVAC systems and other industrial equipment.
Conclusion
This work demonstrates that acceleration-based virtual sensing using a linear Kalman filter (KF) enables reliable low-frequency vibration estimation in full-scale HVAC compressor units without requiring high-fidelity FE models or known inputs, addressing persistent industrial problems such as pipe failures, joint loosening, and costly downtime. By achieving robust estimates under realistic industrial conditions, the approach directly addresses a key barrier to practical deployment and underscores its relevance for predictive maintenance.
The main findings are as follows: • Accuracy under model uncertainty: Average CSF 0.79 over 0–200 Hz across three validation points (range 0.68–0.87), with the dominant resonance near 122 Hz and overall trends captured despite FE discrepancies. • Validated operating regime: The u = 0 assumption holds for quasi-steady intervals of speed sweeps dominated by periodic compressor forces; it is not intended for transients or broadband random excitations. • Practical calibration: With
Overall, the findings confirm that acceleration-based VS using a linear KF is a practical and scalable solution for low-frequency vibration monitoring and fatigue diagnostics in structurally complex industrial systems.
In addition to HVAC applications, the demonstrated robustness under model uncertainty suggests broader relevance. Potential extensions include fatigue diagnostics in piping systems, predictive maintenance frameworks for rotating machinery, and low-frequency noise reduction in industrial products. By enabling accurate estimation without high-fidelity models, the approach offers a scalable tool for industrial monitoring and design optimization.
Future work will extend the framework to partially known or stochastic input models, adaptive noise tuning, and long-term integration with predictive maintenance pipelines.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.