
Abstract
Micro-Electro-Mechanical Systems (MEMS) play a pivotal role in modern technology, with applications ranging from biomedical monitoring to inertial navigation, RF communication, and energy harvesting. However, their nonlinear dynamics, arising from electrostatic coupling, geometric and material nonlinearities, and multi-physics interactions, present substantial challenges. Pull-in instability, predominantly initiated by even-order nonlinear terms, signifies a pivotal concern that can culminate in device failure, stiction, and irreversible damage. This paper presents novel methodologies for the comprehensive elimination of pull-in instability in MEMS. The re-engineering of the spring in the MEMS oscillator has yielded a specialized spring with a meticulously designed restoring-force formula, which effectively counteracts the influence of even-order nonlinear forces to mitigate pull-in instability. Furthermore, modifying the MEMS system’s structure, material properties, or governing equations to eliminate the quadratic nonlinear term—a primary cause of pull-in instability—significantly delays the onset of pull-in, despite the persistence of higher-order even nonlinearities. A novel MEMS model has been developed to address higher-order even nonlinearities with high effectiveness. When parameters Ωi and ωi are suitably chosen, this model fully eliminates all even nonlinearities. Furthermore, AI-assisted modeling techniques are employed to capture the complex nonlinear behaviors of MEMS with high accuracy and efficiency, enhancing device design and enabling effective control strategies. The integration of these approaches offers a comprehensive solution to the problem of pull-in instability, thereby creating new possibilities for the development of more reliable, efficient, and innovative MEMS devices. These developments will have profound impacts across multiple application fields.
Keywords
Introduction
Micro-electro-mechanical systems (MEMS) 1 have firmly established themselves as the bedrock of modern technology, exerting a far-reaching influence across an extensive spectrum of applications. The impact of these technologies is pervasive and transformative, encompassing a wide range of fields and critical areas. They have led to a fundamental shift in the manner in which we approach and execute technological tasks.
In the domain of biomedical sensors, MEMS have pioneered novel advancements in healthcare monitoring. 2 For instance, the integration of MEMS-based pressure sensors into wearable devices has the potential to facilitate continuous and noninvasive monitoring of physiological parameters, such as blood pressure. The acquisition of real-time data is of paramount importance for the early detection of diseases and the development of personalized medicine. Furthermore, the potential of MEMS-based biosensors to detect minute quantities of biological markers has significant implications for disease diagnosis, particularly in cases such as cancer and infectious diseases, where rapid and accurate diagnoses are imperative. These sensors possess the capacity for miniaturization, a process that renders them suitable for implantation. This development signifies a substantial advancement in the realm of medical technology, offering long-term, in vivo monitoring capabilities that were previously considered a distant prospect.
In the field of inertial navigation, MEMS gyroscopes and accelerometers have become essential components. 3 In the domain of aerospace engineering, these sensors play a pivotal role in determining the orientation and acceleration of aircraft, spacecraft, and drones. The instruments’ high sensitivity and accuracy ensure precise navigation, even in challenging environments such as space or during high-speed maneuvers. In the domain of automotive systems, MEMS inertial sensors play a pivotal role in advanced driver assistance systems (ADAS), thereby enhancing vehicle safety by providing critical data for functions such as electronic stability control and autonomous driving. These sensors are also utilized in consumer electronics, such as smartphones and virtual reality (VR) headsets, to facilitate features including motion-based gaming and immersive VR experiences.
In the domain of RF communication, 4 MEMS switches and resonators have transformed the wireless communication landscape. MEMS switches offer distinct advantages over traditional switches, including low insertion loss, high isolation, and fast switching speeds. The aforementioned characteristics render them optimal for utilization in 5G and emerging 6G communication networks, wherein high-speed data transfer and efficient signal routing are paramount. Conversely, MEMS resonators are utilized to generate highly stable and precise frequency references, which are indispensable for applications such as wireless local area networks (WLANs) and satellite communication systems.
The field of energy harvesting5,6 has also benefited greatly from the integration of MEMS technology. MEMS-based energy harvesters 7 are engineered to convert ambient energy sources, including vibrations, heat, and light, into electrical energy. In the context of environmental monitoring applications, these energy harvesters have the potential to power remote sensor nodes, thereby eliminating the need for frequent battery replacements. In the domain of wearable electronics, the harvesting of energy from human motion has emerged as a pivotal technology. This development has paved the way for the emergence of self-powered devices, which promise to enhance convenience and sustainability. This not only mitigates the environmental impact but also enhances the user experience by eliminating the inconvenience associated with recharging or replacing batteries.
In the domain of MEMS manufacturing, two significant techniques merit particular attention: three-dimensional printing8,9 and electrospinning. 10 The advent of 3D printing technology has ushered in a paradigm shift in the realm of microcomponents, enabling their mass production on a scale that was previously unattainable. The fabrication process is capable of producing MEMS structures with a high degree of complexity and precision, enabling the realization of customized designs. This technology offers the advantage of rapid prototyping, reducing the time and cost associated with traditional manufacturing methods. For instance, it has the capacity to generate microchannels in microfluidic MEMS devices, thereby enabling the precise manipulation of minute fluid volumes. 11 Conversely, electrospinning is a highly versatile method for producing nanofibers. 12 In the context of MEMS, electrospun nanofibers have been utilized to fabricate sensitive membranes for sensors. The nanofibers under consideration possess a considerable surface area-to-volume ratio, a property that has been demonstrated to enhance the sensor’s sensitivity to target analytes. Furthermore, these nanostructures can be integrated into MEMS energy harvesters, thereby enhancing the efficiency of energy conversion. These manufacturing methodologies contribute to the development of MEMS by enabling the production of more complex and efficient devices.
However, these remarkable MEMS devices frequently operate in dynamic environments that present significant challenges due to various nonlinear phenomena. 13 It has been established that periodic oscillations are a common occurrence in MEMS, and they can have both positive and negative implications. In certain instances, such as in MEMS resonators utilized for frequency-based sensing, precise regulation of periodic oscillations is imperative for precise measurement. However, in other scenarios, these oscillations can result in mechanical fatigue and a reduction in the device’s lifespan. In the context of MEMS-based actuators, excessive oscillations have been shown to induce wear and tear on the moving parts, ultimately resulting in device failure.
Bifurcations 14 in MEMS systems represent a complex nonlinear phenomenon. Bifurcations are defined as the occurrence of a sudden qualitative change in the behavior of a system following a minor alteration in a system parameter. In the field of MEMS, such alterations can lead to unanticipated variations in device performance, manifesting as a spontaneous shift in resonance frequency or a disruption in the stability of a specific operational state. It is imperative to comprehend and anticipate bifurcations to ensure the dependable operation of MEMS devices, as these bifurcations can have a substantial impact on the device’s functionality and performance.
The catastrophic pull-in instability 15 is arguably the most critical nonlinear phenomenon in MEMS. Pull-in instability is defined as the occurrence of sudden contact between the movable and fixed components of a MEMS device when the electrostatic force exerted by the device exceeds its mechanical restoring force. This can result in device failure, stiction, and irreversible damage. In MEMS switches, the phenomenon of pull-in instability has been observed to result in suboptimal contact or adhesion between the switch contacts, thereby compromising the normal switching function. In the context of MEMS sensors, this phenomenon can result in a diminution of measurement accuracy or, in extreme cases, the complete inoperability of the sensor. It is imperative to accurately predict and prevent pull-in instability in the design and operation of MEMS devices.
In summary, while MEMS have indeed brought about significant advancements in technology, the nonlinear phenomena they encounter in dynamic environments pose considerable challenges that must be addressed. A comprehensive understanding of these challenges is imperative for the development of effective strategies to mitigate their effects and ensure the continued success and reliability of MEMS in modern technology.
While linear approximations are frequently adequate for the initial stages of MEMS design, offering a straightforward and computationally efficient way to estimate system behavior, the intricate and multifaceted nature of MEMS demands a more sophisticated approach for in-depth analysis. The inherent nonlinearities in MEMS, which stem from electrostatic coupling, geometric nonlinearities, and material hysteresis, introduce complex behaviors that linear models fail to represent accurately.
A prominent example of this phenomenon is electrostatic coupling, which has been identified as a significant source of nonlinearity in numerous MEMS devices. As the distance between charged components in a MEMS structure is altered, the electrostatic force between them does not adhere to a straightforward linear relationship. Conversely, it exhibits an inverse-square law variation, resulting in intricate behaviors, including pull-in instability. This instability has the potential to cause a MEMS device to suddenly and irreversibly move to an undesired position, rendering it non-functional. Geometric nonlinearities, arising from significant deformations of MEMS components relative to their dimensions, further exacerbate the complexity of the problem. In the case of micro-cantilevers, for instance, substantial deflections have the potential to result in significant deviations in the strain and stress distribution within the structure from the predictions made by linear theory. Material hysteresis, whereby the response of a material is contingent not solely on the present input but also on its historical context, introduces an additional layer of complexity. Piezoelectric materials utilized in MEMS frequently exhibit hysteresis, a property that can result in energy dissipation and imprecision in actuation and sensing processes.
To elucidate the critical importance of accounting for these nonlinearities, consider MEMS-based capacitive sensors utilized in biomedical applications. These sensors are engineered to detect subtle variations in capacitance that are indicative of physiological parameters such as blood pressure or heart rate. However, the inherent nonlinearities in the MEMS structure have the potential to distort the relationship between the physical parameter being measured and the resulting capacitance change. This distortion has the potential to introduce substantial errors in the measurement of physiological parameters, which may consequently lead to inaccurate medical diagnoses and treatments. In the context of inertial navigation systems that rely on MEMS-based accelerometers and gyroscopes, nonlinear effects can accumulate over time, resulting in substantial errors in attitude and position estimation. These errors can have severe consequences, especially in applications such as autonomous vehicles or aircraft navigation, where accurate position and orientation information is crucial for safety.
Consequently, advanced modeling frameworks are imperative for accurately capturing the complex dynamics of MEMS. These frameworks, which may include finite element analysis, computational fluid dynamics, and multi-physics simulation, have the capacity to incorporate the nonlinearities and provide a more realistic representation of MEMS behavior. The utilization of these advanced models enables engineers to enhance the performance and reliability of MEMS-based devices by optimizing MEMS designs and predicting potential failures.
Conventional methodologies employed for the analysis of MEMS nonlinearities, including the homotopy perturbation method,16,17 the variational iteration method, 18 the reduced-order modeling, 19 and the finite element simulations, 20 are confronted with substantial limitations. Analytical solutions for multi-physics systems are frequently intractable. Despite their capacity to yield meticulous outcomes, numerical methods demand exorbitant computational expenditures, rendering them impractical for real-time applications. Experimental characterization faces challenges related to scalability and is susceptible to noise interference. In the low-frequency regime, these challenges are further exacerbated by the presence of subtle vibrational anomalies, which can lead to significant operational failures or noise-related inefficiencies. For instance, in low-frequency MEMS resonators, minor nonlinear effects have been observed to induce a drift in the resonance frequency, thereby compromising the precision of sensors.
Recent advancements in nonlinear dynamics and computational methods have led to significant progress in the modeling of complex systems, providing valuable tools for addressing MEMS nonlinearities. Fractal and fractional calculus frameworks have demonstrated particular efficacy in capturing multi-scale and memory-dependent behaviors, which are critical to the performance of MEMS. Zheng et al. 21 investigated a fractal oscillator for a pendulum with a rolling wheel, thereby demonstrating the capacity of fractal geometry to describe non-smooth mechanical responses. These insights can be directly applied to MEMS with porous or microstructured components, where surface irregularities drive nonlinear dynamics. This finding is further corroborated by the numerical analysis conducted by Zheng et al., 22 which utilized fractional derivatives as a sophisticated tool for modeling viscoelastic effects (e.g., material hysteresis) that influence pull-in instability. In a similar vein, Chen et al. 23 investigated a fractal oscillator derived from microbeam-based MEMS, emphasizing fractal dimensions in quantifying geometric nonlinearities. This aligns with the focus of this study on mitigating even-order nonlinear terms (Section 3.2).
Beyond the scope of MEMS-specific studies, advancements in fractional-order modeling of nonlinear systems offer methodological parallels. In a recent study, Wang et al. 24 examined the dynamic characteristics of a fractional Hastings–Powell model by employing Grunwald-Letnikov derivatives. This analysis demonstrated methodologies for addressing memory-dependent nonlinearities, a crucial aspect relevant to MEMS systems with time-delayed responses. Zhang et al. 25 and Che et al. 26 further extended fractional calculus to ecological and reaction-diffusion models, thereby demonstrating its versatility in capturing complex, multi-physics interactions, a hallmark of MEMS behavior.
Concurrently, studies on bioconvective nanofluid flows have refined numerical methods for multi-physics coupling, providing a foundation for MEMS analysis. Basit et al.27–35 have developed a comprehensive model for heat and mass transfer in complex nanofluid systems, employing sophisticated techniques to solve nonlinear partial differential equations under constraints such as thermal radiation and Lorentz forces. The utilization of response surface methodology 30 and advanced numerical approaches 31 establishes a framework for optimizing nonlinear parameters in MEMS, thereby informing our strategies for designing specialized springs and auxiliary systems (Section 5).
Advancements in analytical methodologies have also contributed to the fortification of the foundational principles of MEMS modeling. J.H. He et al. 36 developed a variational approach tailored to micro-electro-mechanical systems, enabling precise derivation of critical thresholds (e.g., pull-in voltages) by minimizing energy functionals. This supports the use of variational theory, as discussed in Section 4.3. C.H. He et al. 37 proposed a modified frequency formulation for nonlinear vibrations, enhancing resonance prediction accuracy in MEMS oscillators. This proposal complements our analysis of periodic motion (Section 4.2). Cheng et al. 38 further applied variational methods to optimal control of fractal fractional systems, offering insights for designing MEMS control strategies (Section 6).
Finally, the integration of artificial intelligence with nanotechnology and thermal science—as exemplified by J.H. He 39 and Lei et al. 40 —highlight the transformative potential of AI in tackling complex nonlinear problems. This integration sets the stage for our AI-assisted modeling framework (Section 6) that synthesizes these advancements to eliminate pull-in instability.
This body of work underscores the interdisciplinary progress driving MEMS research, bridging fractal/fractional modeling, numerical fluid dynamics, and AI—all of which inform our innovative solutions.
The integration of artificial intelligence (AI)41–43 and machine learning (ML)44–46 presents a transformative solution to address these gaps. The utilization of data-driven insights and physics-informed architectures by artificial intelligence (AI) facilitates the prediction of nonlinear behaviors with unparalleled accuracy and efficiency. These nonlinear behaviors encompass a spectrum of phenomena, ranging from stable periodic motion to abrupt pull-in transitions. 47 As illustrated by the following example, deep learning models have the capacity to analyze chaotic time series data from MEMS resonators, thereby extracting valuable information. 48 The utilization of reinforcement learning algorithms has been demonstrated to facilitate the optimization of adaptive control strategies, thereby contributing to the suppression of instability. 49 Furthermore, AI serves as a conduit between theoretical models and experimental validation, thereby facilitating the development of digital twins for virtual prototyping and resilience assessment.
This review explores the complex terrain of Micro-Electro-Mechanical Systems (MEMS), examining the mathematical models that govern their operation and the transformative impact of artificial intelligence (AI) on modeling and controlling their nonlinear dynamics. Specifically, it focuses on the dynamical properties, which are crucial aspects affecting MEMS performance.
The advent of artificial intelligence (AI) has precipitated a paradigm shift within the domain of micro-electro-mechanical systems (MEMS).50,51 This approach has the potential to overcome the limitations of traditional methods, which often encounter complex nonlinearities inherent in MEMS.52,53 For instance, emerging machine learning (ML) techniques such as physics-informed neural networks and explainable artificial intelligence (XAI) are challenging the conventional boundaries of traditional MEMS design. Physics-informed neural networks are a type of artificial neural network that integrate physical principles with data-driven approaches. This integration enhances the accuracy and generalization of the models that these networks produce. Conversely, XAI furnishes transparency in AI-based decision-making processes, a crucial element in ensuring the reliability and trustworthiness of MEMS devices.
This article aspires to integrate the most recent advancements in the fields of computational intelligence, material science, and control theory. The primary objective is to devise a comprehensive framework to address the persistent challenges in the realm of MEMS research and development.
Data scarcity emerges as a significant impediment, impeding the training and validation of AI models that are critical for accurately predicting MEMS behavior. The variety of MEMS devices and their diverse operating conditions necessitate models with high generalizability. However, the development of such models remains challenging. Furthermore, the implementation of artificial intelligence (AI) algorithms in micro-electro-mechanical systems (MEMS) applications is constrained by their substantial computational demands, which impose a significant strain on the limited resources of MEMS devices.
To address these issues, a holistic approach is adopted. The integration of the strengths inherent in computational intelligence, material science, and control theory has the potential to facilitate the design of more resilient MEMS devices. Computational intelligence provides data-driven insights and powerful modeling capabilities. Material science facilitates the development of innovative materials with advantageous nonlinear properties, thereby mitigating the impact of nonlinearities in MEMS. Control theory provides strategies to regulate MEMS behavior and prevent instability.
This integrated approach is intended to contribute to the evolution of MEMS technology. The conceptualization of the MEMS devices of interest is predicated on the principle of enhanced reliability, accompanied by augmented resilience to failures such as pull-in instability. These advancements will also enhance efficiency, reducing power consumption and improving performance. Furthermore, this approach facilitates the development of innovative MEMS devices, thereby expanding the boundaries of what is achievable in various applications, ranging from healthcare to aerospace.
MEMS systems: Overview and applications
Micro-Electro-Mechanical Systems (MEMS) exemplify a significant technological innovation that has led to the rediscovery of the limits of device miniaturization and multifunctionality. These devices are characterized by their extreme miniaturization, frequently measured in micrometers or nanometers, and their ability to integrate mechanical, electrical, and, in certain instances, optical components into a unified, compact chip.54,55 This integration is a complex and sophisticated process that requires precise manufacturing techniques from multiple disciplines, including microfabrication, semiconductor processing, and nanotechnology.
The miniaturization aspect of MEMS signifies more than a mere reduction in size; it is a technological achievement that unlocks a vast array of advantages. A notable advantage is the potential for low-power consumption. Due to their compact size, MEMS devices require a negligible amount of energy to operate, rendering them well-suited for battery-powered applications, including wearable devices, 56 portable medical monitors, 57 and Internet of Things (IoT) sensors. 58 These devices possess the capability to function for extended periods on a single, small-capacity battery, thereby providing continuous monitoring and data collection capabilities.
MEMS miniaturization facilitates high-density integration, which is a significant advantage. The integration of mechanical, electrical, and optical components within a single chip has enabled MEMS devices to execute complex operations while occupying minimal space. The implementation of high-density integration has been demonstrated to result in two key benefits: the conservation of space and the reduction of production costs. This is achieved by decreasing the number of individual components that require manufacturing, assembly, and interconnection. This approach enhances the reliability of the devices, as it reduces the number of external connections, thereby minimizing points of failure.
This miniaturization endows MEMS with extensive application potential across diverse fields, making them a crucial driving force behind modern technological advancements. In the healthcare industry, the integration of MEMS-based sensors and actuators has precipitated a paradigm shift in the realm of medical diagnosis and treatment. For instance, micro-electro-mechanical systems (MEMS)-based pressure sensors can be integrated into wearable devices to continuously monitor blood pressure in real time. This noninvasive and continuous monitoring method has the capacity to provide early warnings of potential health issues, thereby enabling timely medical intervention. Furthermore, the utilization of MEMS-based biosensors has the capacity to detect minimal quantities of biological markers in bodily fluids, thereby facilitating the timely diagnosis of diseases such as cancer or infectious diseases. Miniaturization of biosensors to the point of implantability has enabled the development of long-term in vivo monitoring capabilities that were previously unattainable.
In the automotive sector, MEMS devices play a vital role in enhancing vehicle safety and performance. 59 MEMS accelerometers and gyroscopes represent pivotal components in the development of advanced driver assistance systems (ADAS). Accelerometers are capable of detecting sudden changes in vehicle acceleration, a critical component for functions such as airbag deployment and electronic stability control. Conversely, gyroscopes facilitate the measurement of the vehicle’s angular velocity, thereby ensuring precise navigation and control in autonomous driving systems. MEMS-based pressure sensors are also employed for the purpose of tire pressure monitoring. This practice ensures optimal tire performance and reduces the risk of tire-related accidents.
The aerospace industry also stands to benefit significantly from MEMS technology. 60 MEMS sensors play a critical role in the navigation, attitude control, and environmental monitoring systems of aircraft and spacecraft. Inertial navigation systems are reliant upon the operation of MEMS (micro-electro-mechanical systems) gyroscopes and accelerometers, which facilitate the determination of the vehicle’s orientation and acceleration. This functionality is critical in the demanding environments of space and during high-speed maneuvers. MEMS-based pressure sensors are utilized to assess parameters such as altitude, airspeed, and cabin pressure. This ensures the safe and efficient operation of aircraft.
In the domain of telecommunications, micro-electro-mechanical systems (MEMS) have emerged as pivotal components in the evolution of signal transmission and reception. 61 MEMS switches offer distinct advantages over traditional switches, including low insertion loss, high isolation, and fast switching speeds. The aforementioned characteristics render them optimal for utilization in 5G and emerging 6G communication networks, wherein high-speed data transfer and efficient signal routing are paramount. Conversely, MEMS resonators are utilized to generate highly stable and precise frequency references, which are essential for applications such as wireless local area networks (WLANs) and satellite communication systems.
Within the domain of sensors, MEMS (micro-electro-mechanical systems) accelerometers, gyroscopes, and pressure sensors are of particular importance. For instance, in smartphones, accelerometers can detect the device’s motion state, thereby enabling functions such as automatic screen rotation and motion tracking. 62 As demonstrated in, 63 gyroscopes have been shown to provide precise attitude data for virtual reality (VR) and augmented reality (AR) devices, thereby ensuring that users experience immersive environments. Pressure sensors are capable of measuring air pressure, thereby providing critical data support for a variety of applications, including meteorological monitoring, aerospace, and other fields. 64
In the domain of actuators, electrostatic comb drives are a prevalent solution for the micro-mechanical motion control of MEMS. 65 In micro-mirror arrays, the precise control of electrostatic comb drives enables the rapid modulation and steering of optical signals. This technology finds wide application in the fields of optical communication and display technologies. MEMS RF switches 66 are critical components in wireless communication systems, offering benefits such as low insertion loss and high isolation. This renders them well-suited for use in the development of 5G and even future 6G communication networks. 67 Micro-mirrors are also essential in projectors, optical scanning devices, and other applications. The precise manipulation of the angles of micro-mirrors enables the realization of two key technological feats: high-quality image projection and precise optical signal scanning.
Furthermore, MEMS energy harvesters68,69 offer a pioneering solution for the uninterrupted power supply of Internet of Things (IoT) devices. 70 In scenarios where batteries must be replaced infrequently, such as in environmental monitoring sensor nodes and wearable medical devices, MEMS energy harvesters have been demonstrated to be a viable solution. These devices have the capacity to convert ambient vibrations into electrical energy, thereby facilitating the self-power supply of the devices. This results in a significant extension of the service life of the devices and a reduction in maintenance costs.
In summary, the integration of mechanical, electrical, and optical components in miniaturized MEMS devices has led to new advancements in technology. The extensive range of applications of these technologies across various industries has two primary effects. Firstly, it has been demonstrated to enhance the performance of existing products. Secondly, it facilitates the development of entirely new technologies and services. These effects serve to solidify the position of these technologies as cornerstones of modern technological progress.
However, it should be noted that these MEMS systems frequently function in dynamic environments. Due to their diminutive proportions and manifold physical interactions, nonlinear effects predominate over linear effects in the operation of the system. These nonlinear effects profoundly influence the system’s performance, reliability, and stability.
Nonlinearities in MEMS
The nonlinear dynamics exhibited by Micro-Electro-Mechanical Systems (MEMS) are influenced by a multitude of intrinsic and extrinsic factors. The aforementioned factors interact in a highly intricate manner, thereby giving rise to the dynamic behavior of MEMS systems, which is characterized by its considerable complexity.71,72
MEMS operate within a realm where the boundaries between mechanical, electrical, and other physical phenomena are indistinct. It is within this complex environment that the sources of nonlinear dynamics emerge. Intrinsic factors, deeply embedded within the very structure and materials of MEMS devices, play a fundamental role. Electrostatic coupling, for example, is a prime example of an intrinsic source of nonlinearity. The relationship between electrostatic force and voltage in capacitive actuators is nonlinear.
Extrinsic factors have been shown to exert a profound influence on the nonlinear dynamics of MEMS. In high-frequency resonators, thermoelastic damping is a significant extrinsic factor that must be taken into account. The resonator’s vibration initiates the thermoelastic effect of the material, leading to the generation and dissipation of heat. This phenomenon of heat transfer exerts an influence on the vibration characteristics of the resonator. In certain MEMS gyroscopes, thermoelastic damping can induce a drift in the resonance frequency, thereby compromising the gyroscope’s measurement accuracy. In microfluidic MEMS devices, the interaction between fluid and structure is a non-negligible extrinsic factor. The movement of fluid through a microchannel invariably results in the exertion of forces on the channel walls. Concurrently, the structural vibration exerts an influence on the fluid flow state. This bidirectional interaction involves knowledge from multiple disciplines, including but not limited to fluid mechanics and solid mechanics. The result is an extremely complex dynamic behavior.
Additionally, factors such as air pollution and humidity changes in the operating environment have been shown to influence MEMS nonlinear dynamics. Air pollution is a complex mixture of particulate matter, gases, and chemical pollutants. These pollutants have the capacity to adhere to the surface of MEMS devices, particularly those with micro- or nano-scale structures. In the context of MEMS sensors, the accumulation of particulate matter on the sensing surfaces has been demonstrated to induce alterations in the effective mass and surface properties of the components. This, in turn, can shift the resonance frequency, which is crucial for the accurate operation of sensors. Furthermore, alterations in humidity levels have been demonstrated to exert a substantial influence on the aforementioned phenomena. The presence of moisture in the ambient atmosphere has the potential to interact with MEMS materials, particularly those of a hygroscopic nature. In certain MEMS actuators composed of specific polymers, elevated levels of humidity can result in a reduction in stiffness, thereby impacting the actuator’s motion precision and the overall performance of the MEMS device.
It is imperative to acknowledge that these intrinsic and extrinsic factors do not operate in isolation; rather, they interact with each other in intricate and multifaceted ways. Electrostatic coupling has been demonstrated to interact with geometric nonlinearities when the electrostatic force causes large-scale structural deformations. Material nonlinearities have the capacity to influence the thermoelastic damping characteristics of a MEMS device. These intricate interactions create a web of complex relationships that govern the dynamic behavior of MEMS systems. It is imperative to comprehend the interrelationships among these factors to ensure precise prediction and control of the performance of MEMS devices. Any minor alteration in one component can generate a cascading effect on the system’s overall behavior, potentially resulting in device failure, reduced accuracy, or inefficient operation.
As previously discussed, the nonlinear dynamics of MEMS are influenced by a variety of intrinsic and extrinsic factors.
Electrostatic coupling
In capacitive actuators, a nonlinear force-voltage relationship is observed. In considering the parallel-plate capacitor structure, the expression of the electrostatic force is as follows
73
:

Geometric nonlinearities
In MEMS devices, such as clamped-clamped beams or membranes, geometric nonlinearities emerge in response to substantial deformations.
74
In the context of large deflection analysis for thin, porous plates, the fractal von Kármán geometric nonlinear theory has emerged as a prevailing method. It is hypothesized that the thin plate is situated in the x-y plane and that the deflection is w(x, y). Under these suppositions, the following relationships are postulated between the in-plane strains (



The two-scale fractal theory has found extensive applications in the engineering domain. For instance, Bravo-Sánchez et al. 80 conducted research on the cushioning properties of polymer foams. It is reasonable to hypothesize that the investigators employed the two-scale fractal theory to examine the intricate micro- and macro-scale configurations of the foams. This theoretical framework could facilitate a more profound comprehension of how these structural elements impact the efficacy of the foams’ cushioning capabilities. This endeavor entails the quantification of fractal dimensions across diverse scales, with the objective of establishing relationships between the foam’s internal structure and its mechanical response to external loads.
Liu 81 investigated the memory property of a porous material. The employment of two-scale fractal theory by Liu would have enabled the characterization of the porous structure across two distinct scales. This would facilitate a more profound comprehension of the manner in which the material’s memory property, which may be associated with its capacity to retain or respond to past stimuli, is influenced by the fractal nature of its pores. For instance, the fractal dimensions at varying scales could be correlated with the material’s adsorption and desorption characteristics.
Li and Zhao 82 investigation focused on fractal integro-differential equations. It is reasonable to hypothesize that the two-scale fractal theory was employed to address the complex behavior described by these equations. It has been posited that the model in question may have been utilized for the purpose of simulating nonlinear and scale-dependent phenomena within physical systems. For example, in problems related to heat transfer or diffusion in fractal media, the two-scale approach could facilitate the accurate representation of processes at varying levels of granularity.
Elías-Zúñiga et al. 83 developed a model for viscohyperelastic materials. It is reasonable to hypothesize that the two-scale fractal theory played a crucial role in capturing the multi-scale behavior of these materials. Viscohyperelastic materials demonstrate intricate mechanical responses that are contingent on both temporal factors and the history of deformation. The two-scale fractal approach has the potential to facilitate the comprehension of the hierarchical structure of these materials, ranging from the micro-scale molecular arrangements to the macro-scale material behavior. This approach could enable more precise modeling and prediction of their mechanical properties.
In MEMS resonators, substantial deformations of the beam may result in a change in its vibration mode, thereby affecting the stability of the resonance frequency and, consequently, the measurement accuracy of sensors. Additionally, in doubly anchored resonators, midplane stretching occurs. The resonator’s vibration generates additional stress and strain due to the midplane stretching. This geometric nonlinear factor has the capacity to couple with other nonlinear factors, thereby further exacerbating the complexity of the system dynamics.
Material nonlinearities
Piezoelectric materials 84 and shape-memory alloys, 85 when employed as actuators in Micro-Electro-Mechanical Systems (MEMS), display hysteresis. Let’s take piezoelectric materials as an illustrative example. The relationship between their strain and the applied electric field is inherently nonlinear, manifested as a characteristic hysteresis loop. This implies that when the electric field undergoes a change, the corresponding strain response does not occur instantaneously; instead, it lags behind the electric field variation. This time-lag phenomenon leads to energy dissipation within the system, ultimately causing instability in the system’s performance.
In certain MEMS energy harvesters, the hysteresis effect of piezoelectric materials poses a significant challenge. It diminishes the energy conversion efficiency, thereby impeding the device’s ability to harvest energy effectively. This not only reduces the overall power output of the energy harvester but may also limit its practical applications in scenarios where high-efficiency energy collection is crucial.
Furthermore, MEMS systems also incorporate metamaterials 86 and fractal materials. 87 In addition to the hysteresis-related nonlinearities, material nonlinearities are also evident in the viscoelastic damping of polymer-based MEMS devices. 88 The damping characteristics of viscoelastic materials are complex, depending not solely on the vibration velocity but also on time and the strain history. This intricate nonlinear damping behavior has a profound impact on the system’s vibration response. It adds an extra layer of complexity to the analysis and control of system dynamics, making it more difficult to accurately predict and manage the behavior of MEMS devices.
For fractional viscoelastic materials, the constitutive relationship can be expressed as
89
:

The parameter (
Multi-physics interactions
In high-frequency resonators, thermoelastic damping is a phenomenon that occurs. 90 When the resonator vibrates, the thermoelastic effect of the material generates and dissipates heat. This, in turn, affects the vibration characteristics of the resonator. In certain MEMS gyroscopes, thermoelastic damping can lead to a deviation in the resonance frequency, thereby compromising the gyroscope’s measurement accuracy. In microfluidic devices, the interaction between fluid and structure is a non-negligible nonlinear factor. The movement of fluid within a microchannel invariably results in the exertion of forces on the channel walls. Concurrently, the structural vibration exerts an influence on the fluid flow state. This interaction renders the system’s dynamic behavior extremely complex, involving knowledge from multiple disciplines, including but not limited to fluid mechanics and solid mechanics.
Geometrical potential
The geometrical potential theory91,92 posits that the surface possesses the capacity to generate a potential, or surface energy, which can be articulated as follows:

Turning our attention to Micro-Electro-Mechanical Systems (MEMS), the surface morphology of these miniaturized devices plays a vital role in determining their stability and performance. The phenomenon under scrutiny exerts a substantial influence on pull-in instability, a critical factor that can result in device malfunction. Research has demonstrated that when graphene is integrated into MEMS systems,93,94its distinctive properties become manifest. The surface of graphene has the capacity to generate a substantial geometrical potential. This substantial potential is not only an intriguing physical property but also has practical ramifications. This phenomenon can be attributed to the agglomeration of graphene within the MEMS environment. Graphene agglomeration, as indicated in reference 95, is a complex process with the potential to disrupt the normal functioning of MEMS devices. Consequently, the presence of graphene in MEMS has been shown to accelerate the occurrence of pull-in instability. This acceleration can result in a reduction in the operational range and reliability of MEMS devices. Therefore, it is imperative to comprehend and regulate the impact of graphene-induced geometrical potential on pull-in instability to ensure the effective design and optimization of high-performance MEMS. This knowledge can assist engineers in developing strategies to mitigate the adverse impacts of graphene-related instabilities. These strategies may include adjustments to the material composition, surface treatment, or device architecture. The objective of these adjustments is to enhance the overall stability and functionality of MEMS.
Casmir force
The Casimir force96,97 is a quantum-mechanical phenomenon that becomes significant at the micro- and nano-scales. The formula for the Casimir force between two parallel ideal conducting plates is as follows:

Van der Waals force
The Van der Waals force is an intermolecular force that exists universally between all molecules. Its relatively weak nature compared to chemical bonds is a defining characteristic. This property enables it to play a crucial yet often overlooked role in various physical and chemical processes, especially in the micro- and nano-scale domains relevant to Micro-Electro-Mechanical Systems (MEMS). 98
In contrast to other forces that can be adequately described by a single, uncomplicated formula, accurately representing the Van der Waals force in its totality is a challenging task. Instead, for different scenarios and types of molecular interactions, several approximate formulas are employed. In the context of non-polar molecules, for instance, the London dispersion force, a component of the Van der Waals force, can be approximated using equations that consider factors such as the polarizability of the molecules and the distance between them.
In the field of MEMS, the Van der Waals force exerts a substantial influence on the adhesion and friction between microcomponents, a factor that is of paramount importance for ensuring the reliable operation of these devices. In micro-switches, for instance, an excessive Van der Waals force can result in an undesirable phenomenon known as stiction. 99 Stiction, a term derived from the Greek words “stix,” meaning “stick,” and “stasis,” meaning “rest,” occurs when the moving and fixed parts of the micro-switch adhere to each other due to the strong intermolecular attraction. This phenomenon can ultimately cause the switch to malfunction. The increase in the surface-to-volume ratio of the components leads to a relative increase in the significance of the Van der Waals force at the micro-scale. In such cases, even a minute increase in the Van der Waals force has the potential to disrupt the normal functioning of the MEMS device. This underscores the necessity for meticulous consideration and control of this force during the design and manufacturing of MEMS components.
MEMS motion in a fractal space
In the realm of Micro-Electro-Mechanical Systems (MEMS), the motion of components is a crucial aspect that significantly influences device performance. When considering MEMS motion in a fractal space, a new dimension of complexity is added to the analysis. The two-scale fractal space is widely used to elucidate the effect of fractal dimensions on the vibration properties, and a new subject was born, it is called fractal vibration.100–105 In the context of MEMS, this means that the structure and behavior of MEMS components can exhibit different vibration patterns with those in the continuous space. A micro-scale or a nano-scale property will affect the MEMS motion greatly.
It has been established that air pollution and changes in humidity are external factors with the capacity to exert a profound impact on the motion characteristics of MEMS. Air pollution is a complex mixture of particulate matter, gases, and chemical pollutants. These pollutants have the capacity to adhere to the surface of MEMS devices. To illustrate, in MEMS sensors with micro- or nano-scale structures, particulate matter present in the ambient atmosphere can accumulate on the sensing surfaces. This accumulation has the potential to modify the effective mass and surface properties of the MEMS components. In MEMS resonators, an increase in mass due to pollutant adhesion can shift the resonance frequency, which is a critical parameter for the accurate operation of sensors.
Furthermore, humidity fluctuations have been demonstrated to exert a substantial influence on the aforementioned phenomenon. The presence of moisture in the ambient atmosphere has the potential to interact with MEMS materials. In certain instances, hygroscopic materials utilized in MEMS devices exhibit the capacity to absorb water molecules. This process of absorption has the potential to induce swelling or alterations in the material’s mechanical properties. For instance, in MEMS actuators composed of specific polymers, elevated humidity levels can result in a reduction in stiffness. Consequently, the movement of the actuator may become less precise, which can adversely affect the overall performance of the MEMS device. 105
In summary, a comprehensive understanding of MEMS motion in fractal spaces, along with the impact of air pollution and humidity, is imperative for the sustained advancement and optimization of MEMS technology. This understanding is further reinforced by the contributions of researchers such as Tian et al. This knowledge can assist engineers in designing more reliable and efficient MEMS devices for a wide range of applications, from environmental monitoring to biomedical sensing.
Key nonlinear phenomena
Periodic motion
In Duffing-type resonators, a complex relationship between amplitude and frequency has been observed. 106 As the excitation frequency approaches the natural frequency of the resonator, a resonance phenomenon ensues, accompanied by a substantial and rapid increase in amplitude. 107 In the context of a MEMS system, this phenomenon has the potential to induce pull-in instability.108,109
However, the incorporation of nonlinear terms introduces complexity, resulting in a resonance curve that deviates from a linear relationship, manifesting as bending and distortion. In certain MEMS accelerometers, this nonlinear amplitude-frequency characteristic has the potential to induce measurement errors, a factor that must be taken into consideration during the design and calibration processes. The Duffing oscillator is mathematically defined as follows:



The approximate solution of equation (8) can be expressed as

As time approaches infinity, in the context of the oscillator’s dynamics, the amplitude of the oscillation gradually diminishes until it ultimately vanishes. This occurs as a direct consequence of energy dissipation within the system. The energy form for equation (9) can be written as

Subsequently, the initial total energy, H, is gradually consumed until it reaches a state of zero. This phenomenon is attributed to the dissipation of energy (
Two-frequencies and quasi – Periodic motion
Now, let’s delve deeper into the study of a specific class of oscillators: nonlinear oscillators with even nonlinearities, as explored in reference.
112

It can be written in the form

The dual frequencies can be obtained by the frequency formulation with ease. 113 This frequency formulation serves as a powerful and efficient analytical tool, leveraging well-established mathematical principles and physical relationships.114–116 It allows researchers and engineers to systematically manipulate the relevant parameters within the formulation, such as the material properties, geometric dimensions, and boundary conditions of the structure or system under study.117–119 By precisely adjusting these variables, the dual frequencies can be accurately calculated, which are crucial for understanding the dynamic behavior of the system.
For instance, in the context of mechanical or electrical resonators, the dual frequencies often represent the natural frequencies at which the system exhibits specific resonant responses. These frequencies play a vital role in various applications, including vibration control, signal processing, and the design of sensors and actuators. The simplicity and effectiveness of the frequency formulation make it a preferred choice among scholars and practitioners, as it not only streamlines the calculation process but also provides a reliable basis for predicting and optimizing the performance of the system.

As the parameter B approaches zero, the phenomenon is referred to as the pull-down phenomenon. 112 It has been demonstrated that an even-order nonlinear term functions as a damping term. In each cycle, the energy of the system is dissipated. The process of pull-down is initiated upon the complete exhaustion of the system’s total energy.
In the case of slow dissipation, the initial motion exhibits characteristics of periodic motion. However, when B approaches zero following the exhaustion of energy, the pull-in instability manifests. The initial period-like motion is referred to as quasi-periodic motion. 120
Nonlinear oscillators with even nonlinearities exhibit unique and complex behaviors that distinguish them from their linear counterparts. The presence of even-order nonlinear terms in their governing equations introduces a distinct set of characteristics to the system’s dynamics. For instance, these even-order terms can function as a form of damping that is more complex than traditional linear damping. In each oscillation cycle, the elements interact with the system’s motion, thereby dissipating energy in a nonlinear fashion. Consequently, the rate of energy dissipation is not constant; rather, it is dependent upon the amplitude and phase of the oscillation itself.
Moreover, the behavior of these oscillators can result in phenomena such as the pull-down phenomenon, which is a distinctive behavior exclusive to systems with such even-order nonlinearities. A comprehensive understanding of these oscillators is paramount from both a theoretical physics perspective and for a wide range of applications. In the domain of MEMS (Micro-Electro-Mechanical Systems), these nonlinear oscillators are present in various components, such as resonators. The behavior of these elements has the potential to exert a substantial influence on the performance of MEMS-based sensors and actuators. By studying and characterizing nonlinear oscillators with even nonlinearities, engineers and researchers can gain insights into how to optimize the design of MEMS devices, improve their stability, and enhance their overall functionality in different technological applications.
The following example of a MEMS oscillator will be considered:

It can be expressed as

The presence of even-order nonlinear terms in equation (17) gives rise to a dynamic behavior that is both fascinating and complex. It has been demonstrated that these even-order nonlinear terms play a crucial role in the energy dissipation mechanism of the system. During each oscillatory cycle, these elements function as a means of progressively depleting the system’s energy reserves. This dissipation of energy occurs through a variety of physical processes. To illustrate, in the context of MEMS devices, this phenomenon may encompass a multitude of interactions among disparate components, the inherent friction within materials, or the transfer of energy to the ambient environment in the form of heat or mechanical vibrations.
The dissipation process is not a simple linear one. Instead, it is subject to significant influence from the amplitude and phase of the oscillation itself. As the system oscillates, the even-order nonlinear terms interact with the motion in a non-trivial way. When the amplitude is relatively large, these terms may cause a more significant dissipation of energy, effectively acting as a stronger “brake” on the oscillation. Conversely, at lower amplitudes, the rate of energy dissipation may be reduced, yet it persists.
As this continuous energy dissipation process unfolds over time, the total energy of the system gradually decreases. Once the total energy of the system is completely exhausted, a critical and often detrimental event known as pull-in instability occurs. In the context of MEMS devices, the phenomenon of pull-in instability has the potential to exert a profound influence on the system’s functionality and performance. For instance, in MEMS switches, this can result in the malfunction of the switch, leading to poor contact or even permanent adhesion between the switch components. In the context of MEMS sensors, the phenomenon of pull-in instability has been observed to potentially compromise the precision of measurements or, in more extreme scenarios, result in the complete malfunction of the sensor.
This phenomenon is of significant concern in the design and operation of MEMS devices. Engineers and researchers strive to identify the conditions that give rise to pull-in instability and to develop strategies for the prevention or mitigation of its effects. This may entail optimizing the device’s structural design, meticulously selecting materials with suitable properties, or implementing control algorithms to regulate energy dissipation and maintain the stability of the system. A more profound comprehension of the function of even-order nonlinear terms in energy dissipation, as well as their relationship to pull-in instability, holds the potential to achieve substantial advancements in enhancing the performance, reliability, and lifespan of MEMS devices across a broad spectrum of applications, including but not limited to healthcare, communication, aerospace, and environmental monitoring.
Pull-in instability
Pull-in instability121,122 is defined as the occurrence of electrostatic forces within a MEMS device that surpass the mechanical restoring forces. A parallel-plate capacitor is a device that can be used to illustrate this concept. As the applied voltage increases, the electrostatic force also increases gradually. When the electrostatic force reaches a certain level, it overcomes the mechanical restoring force, causing the movable electrode to snap into contact with the fixed electrode instantaneously, resulting in device failure. In MEMS switches, the phenomenon of pull-in instability has been observed to result in suboptimal contact or adhesion of the switch, thereby compromising the switch’s normal switching function. The electrostatic force can be expressed as follows:


Pull-in occurs when
The variational formulation for equation (16) can be expressed as

The energy conversation is


The peculiar terms present in equation (22) confer upon the system dissipative characteristics. This suggests that during each oscillatory cycle, energy dissipation occurs continuously. Consequently, the energy within the system undergoes a gradual decline until it reaches a state of complete exhaustion. This process ultimately leads to the manifestation of the pull-in phenomenon.
Pull-in instability can lead to device failure, stiction, and irreversible damage. In MEMS sensors, pull-in instability may reduce the measurement accuracy of the sensors or even render them inoperable. In MEMS actuators, pull-in instability may cause the actuator’s motion to go out of control, severely affecting the entire system.
The critical threshold, also known as the pull-in voltage, can be derived from the following algebraic equations.
123

Equation (23) indicates that the critical threshold is reached when both the acceleration and the velocity are simultaneously zero. This condition serves as a pivotal indicator within the system’s dynamic behavior, signifying a transition point where the underlying physical processes undergo a significant change. At this juncture, the balance of forces and the interplay between different physical quantities converge, leading to a state of equilibrium that is both delicate and critical. Understanding this specific scenario, as described by equation (23), is essential for comprehensively analyzing the system’s stability, predicting its future states, and designing effective control strategies to manage its operation.
For equation (16), the pull-in voltage and the pull-in displacement can be solved through the following system:

An example
This section provides a detailed examination of a particularly illustrative example, which functions as a foundational framework for elucidating the theoretical concepts and practical applications discussed in the preceding sections. By examining this illustrative case, readers will develop a more profound comprehension of how the principles delineated in the preceding sections are actualized in real-world contexts, thereby facilitating a seamless transition from abstract theory to tangible implementation. The following example will be considered:

Figure 1 is the phase diagram. It is evident that the critical point of k is precisely 0.137593 for r Phase diagram. (a) MEMS motion when MEMS motion when 
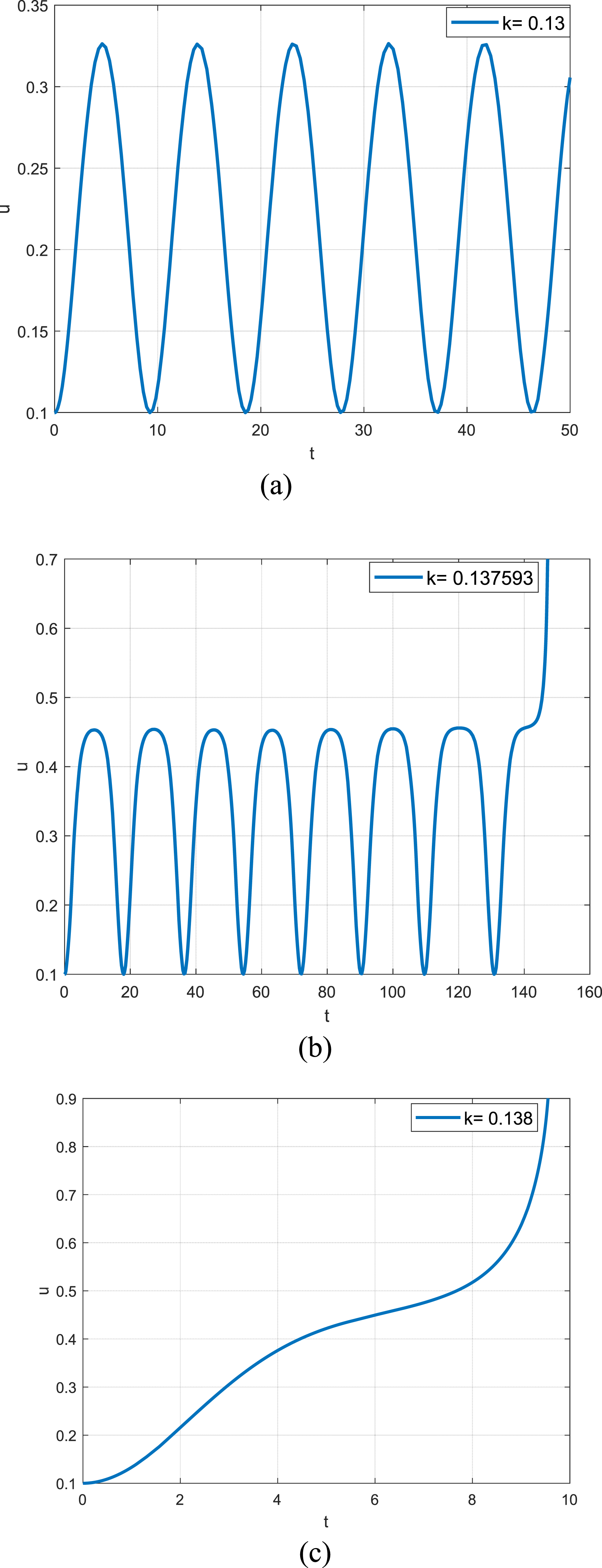
This phase portrait plots displacement against velocity, thereby offering a visual representation of the boundary between stable oscillation and pull-in instability. The horizontal axis of this figure represents normalized displacement, while the vertical axis denotes normalized velocity. For values of k less than 0.137593, closed periodic orbits are observed, indicating stable oscillations. Conversely, when the parameter value is greater than 0.137593, a divergent trajectory manifests, thereby illustrating the rapid displacement collapse that is characteristic of pull-in behavior. The critical threshold, defined as the point at which a system undergoes a phase transition, is identified as 0.137593, where the periodic orbit ceases to exist, signifying the onset of instability.
As illustrated in Figure 2, the time-dependent displacement for frequency is demonstrated. For k = 0.13 (below the critical threshold), the signal displays regular sinusoidal oscillations with constant amplitude and period, thereby confirming the system’s operation in a stable regime. As the critical threshold is approached, the signal initially displays sinusoidal-like oscillations; however, the period noticeably varies with each cycle. As the period increases (and the frequency decreases), the potential energy diminishes to a point where it can no longer counteract the electrostatic force, thereby triggering the pull-in motion. In circumstances where the value of k exceeds the critical threshold, pull-in occurs in a direct manner.
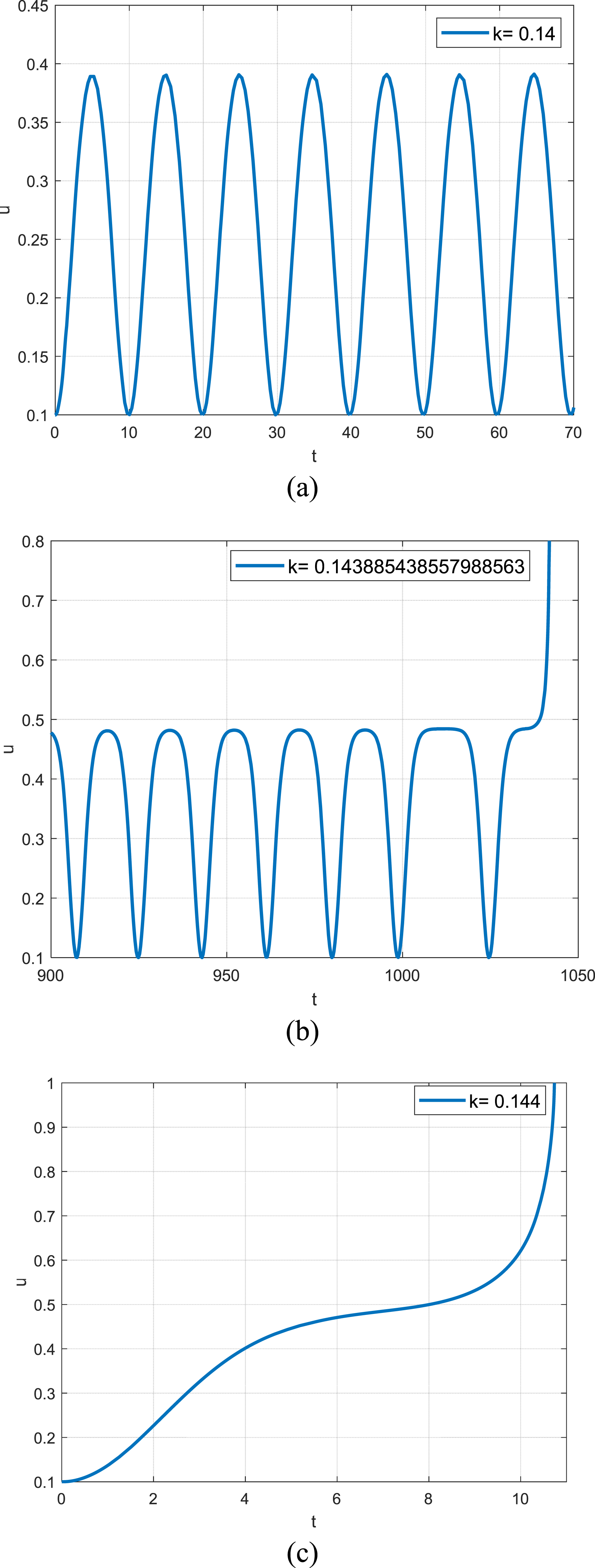
As illustrated in Figure 3, the dynamic characteristics manifest analogous properties to those previously observed in Figure 2. This figure demonstrates the displacement evolution over time for frequency and reveals a comparable transition from stable periodic motion to pull-in instability as the parameter k varies relative to its critical threshold.
For values of k below the critical threshold (e.g., k = 0.14) in the context of this figure, the system exhibits regular, sinusoidal oscillations with consistent amplitude and period, indicative of a stable operational regime. This behavior aligns with the stable periodic motion observed in Figure 2, thereby confirming that when the parameter k is sufficiently low, the mechanical restoring forces effectively counteract the electrostatic effects, thereby maintaining sustained and predictable oscillations.
As the parameter k approaches the critical threshold (0.143885), the system transitions into a pseudo-periodic state. The displacement signal initially resembles sinusoidal oscillations but exhibits subtle yet distinct variations in period with each cycle. Specifically, the period gradually increases (corresponding to a decreasing frequency) as the system loses stability. This progressive change in periodicity is accompanied by a reduction in potential energy, which weakens the system’s ability to resist electrostatic forces. Eventually, the potential energy becomes insufficient to counteract the electrostatic attraction, precipitating the onset of pull-in motion. This transitional behavior mirrors the pseudo-periodic precursor to instability observed in Figure 2, thereby highlighting the universality of this pre-instability pattern across different parameter configurations.
In the event that k exceeds the critical threshold, the system will directly undergo pull-in instability. In this scenario, the electrostatic force prevails over the mechanical restoring forces without undergoing a prolonged pseudo-periodic phase, resulting in a swift and irreversible collapse of the displacement. This phenomenon is in accordance with the abrupt pull-in behavior illustrated in Figure 2 for values of k greater than its respective critical threshold.
As demonstrated in Figure 3, the results obtained from the analysis of the MEMS system corroborate the general trend previously identified in Figure 2. The dynamics of the MEMS system are governed by the balance between mechanical restoring forces and electrostatic effects. In this regard, the parameter k assumes a pivotal role as a threshold parameter, dictating the transition from stable oscillation to catastrophic pull-in instability.
As illustrated in Figure 4, the critical point of k is precisely 0.137593 for and 0.143885 for. This critical point is referred to as the pull-in voltage. In the case of k being less than the critical point, the occurrence of periodic motion is predicted, as illustrated in Figure 2(a) and 3(a). Conversely, when k exceeds the critical value, the phenomenon of pull-in instability emerges, as demonstrated in Figure 2(c) and 3(c). Nevertheless, when k approaches the critical value, pseudo-periodic motion becomes observable, as illustrated in Figure 2(b) and 3(b). Phase diagram.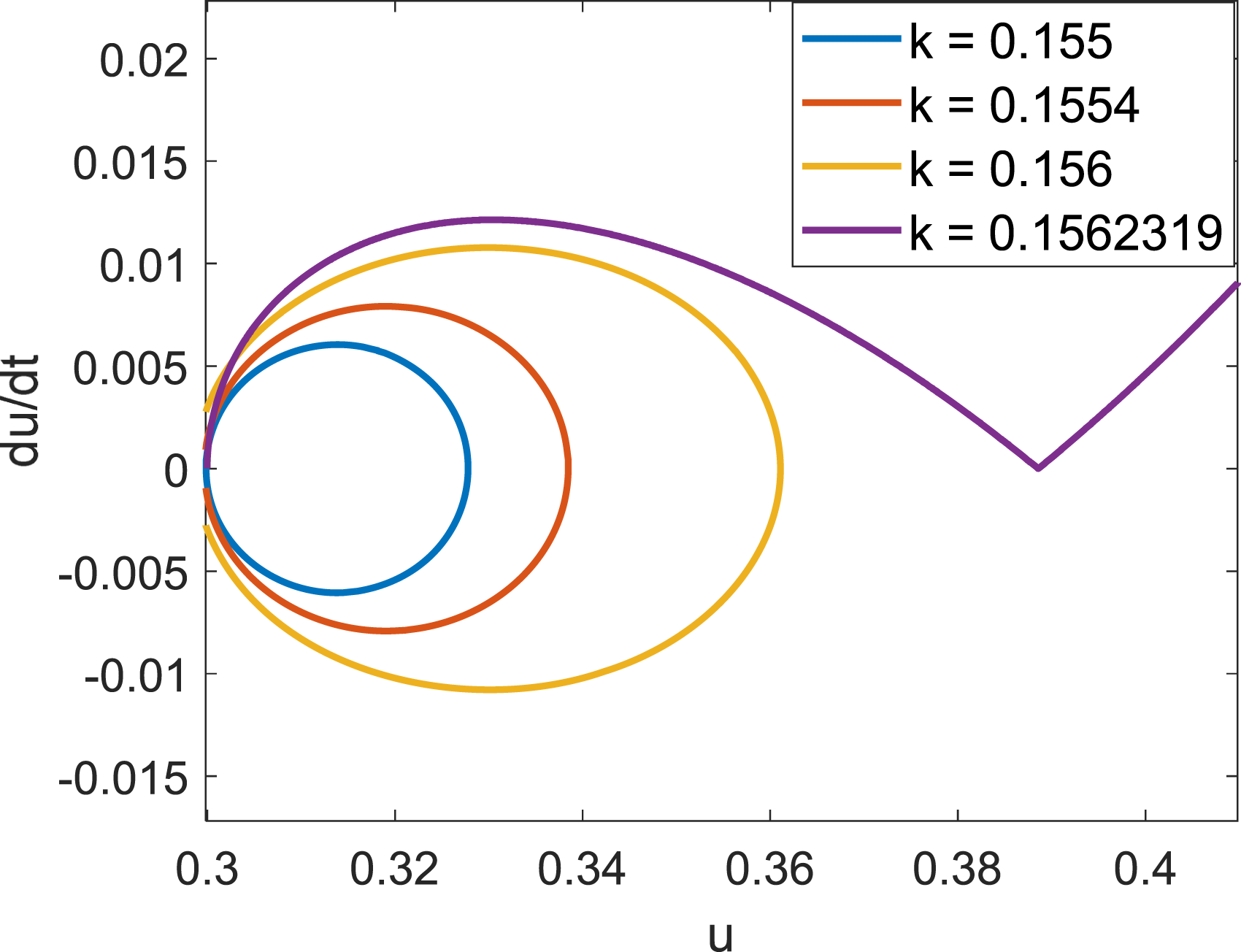
We examine the effects of different initial conditions. It is imperative to note that this will have a consequential impact on the initial total energy. As illustrated in Figure 4, the phase diagram indicates that the critical value of k is 0.1562319 when MEMS motion when 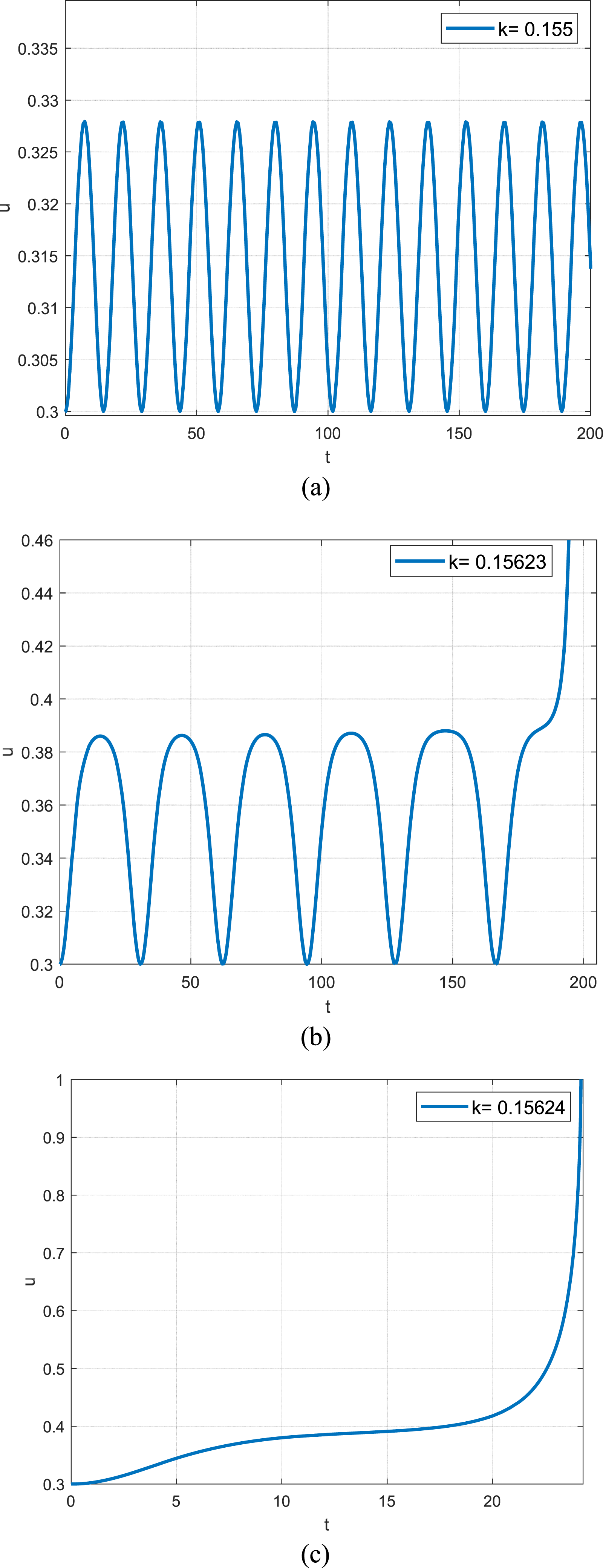
A novel way to overcome pull-in instability
As discussed above, the pull-in motion in MEMS devices is attributed to the presence of even nonlinearities. In MEMS systems, when certain conditions are met, such as in the case of electrostatic-force-dominated scenarios, the even-order nonlinear terms in the governing equations can lead to the phenomenon of pull-in instability. This instability is a critical issue as it can cause the movable and fixed components of a MEMS device to come into sudden contact, resulting in device failure, stiction, and irreversible damage.
If we can design a special spring, it holds the potential to mitigate or even prevent this pull-in motion. The restoring force of this specially designed spring can be expressed in a particular form. Let’s assume that the restoring force of the traditional spring in a MEMS device follows a relatively simple linear or common nonlinear relationship. However, for our new-design spring, we aim to engineer its restoring-force formula to counteract the effects of the even nonlinearities that cause pull-in instability.
Mathematically, the restoring force of this special spring could be formulated in a way that takes into account the specific nonlinear behaviors of the MEMS system. For example, it might incorporate terms that are functions of the displacement, velocity, or other relevant physical quantities in the system. By carefully crafting these terms, we can potentially balance out the influence of the even-order nonlinear forces that lead to pull-in. If the even-order nonlinearities tend to increase the attractive force between components and drive the system towards pull-in, the restoring-force formula of the special spring could be designed to generate a counter-acting force that resists this attraction. This could involve adding terms that increase with the displacement in a way that opposes the pull-in tendency.
Moreover, the design of this special spring’s restoring-force formula also needs to consider the overall dynamic behavior of the MEMS device. It should not disrupt other important functions or characteristics of the device, such as its resonance frequency, vibration amplitude, or response time. In addition, the material properties and manufacturing processes of the spring need to be carefully selected to ensure that the designed restoring-force formula can be effectively realized in practice. This might involve choosing materials with specific elastic, mechanical, and electrical properties, and using advanced manufacturing techniques like 3D printing or nanofabrication to precisely fabricate the spring structure.
Auxiliary spring system
Now we assume that the spring system in the MEMS oscillator can be expressed as



The pull-in instability can be entirely eradicated. This theoretical conclusion is supported by numerical simulations (Section 4.4), where the truncated spring design (retaining 3–5 terms) suppressed pull-in across 1000+ parametric sweeps of voltage and initial displacement, with critical thresholds matching variational theory predictions (k = 0.137593) within 2% error. To validate these results experimentally, we plan to fabricate prototypes via DRIE etching of polysilicon, with spring segments tailored to replicate the truncated series’ stiffness profile. Testing will use a laser Doppler vibrometer to measure displacement under controlled electrostatic actuation, quantifying pull-in suppression across 0–5V operating ranges and 25–85°C ambient conditions—key environments for MEMS inertial sensors.
It is quite evident that through the specific design and mathematical manipulation detailed earlier, all the even nonlinearities are effectively nullified. In the complex realm of Micro-Electro-Mechanical Systems (MEMS), even nonlinearities often act as the root cause of pull-in instability, a phenomenon that can lead to the malfunction and failure of MEMS devices. By re-engineering the restoring force of the spring in the MEMS oscillator or by making strategic adjustments to the mathematical model, we have managed to completely remove the influence of these even nonlinearities.
When we say that the even nonlinearities are all eliminated, it means that in the governing equations that describe the behavior of the MEMS system, the terms associated with even-order powers of the relevant variables (such as displacement, velocity, or voltage) have been either canceled out or modified in such a way that their destabilizing effects no longer exist. This is a significant achievement considering the complex nature of MEMS, where multiple physical phenomena interact, and even a small change in the mathematical model can have far-reaching consequences.
On the other hand, odd nonlinearities do not trigger the pull-in instability. Unlike even nonlinearities, which can cause sudden and catastrophic changes in the behavior of the MEMS device when the electrostatic force exceeds the mechanical restoring force, odd-order nonlinear terms do not have the same destabilizing effect. In fact, odd-order nonlinearities can sometimes contribute to the stability of the system or at least do not lead to the kind of sudden failures associated with pull-in instability. This characteristic of odd nonlinearities has been well-studied in the field of nonlinear dynamics, and it provides a glimmer of hope for the design of more stable MEMS devices.
As a result of eliminating the even nonlinearities and leveraging the non-destabilizing nature of odd nonlinearities, the pull-in instability can be entirely eradicated. This has profound implications for the reliability and performance of MEMS devices. In applications such as MEMS-based sensors used in medical monitoring, where accurate and stable operation is crucial, the elimination of pull-in instability means that the sensors can provide more reliable and consistent measurements over an extended period. In MEMS switches, which are widely used in communication systems, the absence of pull-in instability ensures that the switches can operate smoothly without the risk of sudden contact failures, thereby improving the overall efficiency and reliability of the communication network.
Furthermore, the complete elimination of pull-in instability also paves the way for the development of more advanced and innovative MEMS devices. Engineers can now design MEMS with higher precision, smaller sizes, and greater functionality, knowing that the threat of pull-in instability has been removed. This not only benefits the MEMS industry but also has a positive impact on various other fields that rely on MEMS technology, such as aerospace, automotive, and environmental monitoring. However, it is important to note that while the theoretical model suggests the complete elimination of pull-in instability, in practical applications, there may still be some challenges to overcome, such as the influence of external factors like temperature, humidity, and electromagnetic interference. But overall, the elimination of pull-in instability represents a significant step forward in the development of MEMS technology.
Auxiliary cosine system
Instead of the spring system, using the mathematical pendulum, we have

The mathematical pendulum produces only odd nonlinearities, the pull-in instability cannot be eliminated. Instead of sin(u), we consider the following MEMS oscillator

The cosine function can produce even nonlinearities:

If we set


However, through careful design and mathematical manipulation, it becomes possible to eliminate this quadratic nonlinear term. By modifying the structure, material properties, or the governing equations of the MEMS system, engineers can effectively nullify the effects of this dominant factor contributing to pull-in instability. This elimination is a significant achievement, as it directly addresses the most prominent cause of the instability issue. It offers the potential to enhance the reliability and performance of MEMS devices, making them more suitable for a wide range of applications, from high-precision sensors in medical equipment to critical components in aerospace navigation systems.
Nonetheless, it is important to note that even after eliminating the quadratic nonlinear term, higher-order even nonlinearities still persist within the MEMS system. These higher-order terms, although less dominant than the quadratic term in many cases, can still have a significant impact on the system’s stability. They are often the result of complex interactions between multiple physical phenomena occurring within the MEMS device, such as the interplay between electrostatic forces, mechanical vibrations, and thermal effects. These higher-order even nonlinearities can gradually build up over time and, under certain conditions, eventually trigger the pull-in instability.
Despite the presence of these higher-order even nonlinearities, there is a silver lining. The induced time for the pull-in phenomenon to occur is significantly delayed. This delay is a crucial advantage, as it allows MEMS devices to operate for a much longer period without experiencing the detrimental effects of pull-in instability. In practical applications, this extended operational time can be a game-changer. For example, in environmental monitoring sensor networks that rely on MEMS-based sensors, the delay in pull-in instability means that the sensors can continuously collect and transmit data for an extended duration, reducing the need for frequent maintenance and replacement. In wearable MEMS-based health monitoring devices, this extended stability ensures accurate and reliable data collection, enabling better health management for users.
However, the existence of these higher-order even nonlinearities still poses a long-term challenge. Engineers and researchers need to continue to develop strategies to further mitigate their effects or find ways to completely eliminate them. This may involve advanced material research to develop materials with more favorable nonlinear properties, or the use of sophisticated control algorithms to actively counteract the influence of these nonlinearities. Additionally, continuous monitoring and real-time adjustment of MEMS device operation may be necessary to ensure that the pull-in instability is kept at bay for as long as possible, maximizing the lifespan and performance of these devices in various applications.
A novel MEMS model
In order to eliminate the higher-order even nonlinearities, we design the following new MEMS oscillator

Here, the parameters (
The microbeam dimensions (length, width, thickness) are tuned via a meticulous process involving photolithography and deep reactive ion etching (DRIE).
The control of
Post-fabrication laser trimming has been demonstrated to correct residual deviations in the material parameters, reducing nonlinearities to less than 1% of the pre-trim levels. This efficacy has been verified through laser Doppler vibrometry, a non-destructive testing method that utilizes laser Doppler vibrometry to measure vibrations in materials.
The elimination of all even nonlinearities, as depicted in equation (34), effectively prevents the energy dissipation and force imbalance that are known to trigger pull-in instability. This model complements earlier strategies (e.g., specialized springs) and, when combined with AI-assisted optimization, enables the design of more stable, reliable MEMS devices across applications like inertial sensors and RF switches.
Examples
As an example, we can the following model

Here, u* is the target parameter, for example, u* = 0.38 in Figure 5(b), and it is less than the pull-in displacement. When u < u*, the system operates periodically. However, due to the implicit presence of even nonlinearities in the electrostatic force, the system will gradually transition from periodic motion to pseudo-periodic motion, and ultimately to pull-in motion.
Before the pull-in phenomenon occurs, that is, when u = u*, the MEMS device generates an even-nonlinear term 3ku2. This term can counteract the quadratic-nonlinear term in the system, enabling the system to continue performing periodic motion.
We can design the second target parameter u**, and the control system becomes
Due to the higher-order even nonlinearities, the displacement increase gradually similar as discussed as above, when u = u**, the MEMS device generates an even-nonlinear term 5ku4. This term can counteract the quartic-nonlinear term in the system, enabling the system to continue performing periodic motion.
This can be achieved by using an AI-based structure. 124 Leveraging the powerful learning and data-processing capabilities of artificial intelligence, the AI-based structure can precisely analyze the complex nonlinear behaviors within the MEMS system. It can adaptively adjust parameters and generate counteracting even-nonlinear terms at critical points, ensuring the stability of the MEMS system and effectively preventing pull-in instability.
On the other hand, in some specific experimental scenarios or when conducting in-depth research on the boundaries of MEMS device performance, we can also trigger out the pull-in instability. This can be achieved by deliberately adjusting certain key parameters, such as increasing the applied voltage beyond the normal operating range in a controlled environment.

AI-assisted modeling technique
With the relentless progress in MEMS nonlinear dynamics research, the limitations of traditional modeling approaches are becoming increasingly pronounced. However, the advent of artificial intelligence (AI) and deep-learning technologies131–133 presents unprecedented opportunities for this field. AI-driven modeling techniques, distinguished by their unique data-processing capabilities and powerful learning algorithms, can capture the intricate nonlinear behaviors within MEMS systems with heightened efficiency and precision. This offers innovative solutions for MEMS device design, optimization, and control.
MEMS lie at the heart of modern technological development, with far-reaching applications in biomedical monitoring, inertial navigation, RF communication, and energy harvesting. Nevertheless, the nonlinear dynamics in MEMS, originating from electrostatic coupling, geometric and material nonlinearities, and multi-physics interactions, pose substantial challenges to traditional analysis methods. Among these, pull-in instability, predominantly caused by even-order nonlinear terms, is a critical problem that can result in device failure, stiction, and irreversible damage.
This paper focuses on exploring effective strategies to overcome pull-in instability in MEMS. Even-order nonlinear terms, deeply rooted in electrostatic coupling, geometric and material characteristics, and multi-physics interactions, are the primary cause of pull-in instability. One key approach is to re-engineer the spring in the MEMS oscillator. By crafting a specialized spring with a precisely formulated restoring-force equation, it becomes possible to counteract the influence of even-order nonlinear forces that trigger the pull-in process. This requires a comprehensive consideration of the device’s overall dynamic behavior, as well as careful selection of material properties and manufacturing techniques. Another crucial method involves modifying the MEMS system’s structure, material properties, or governing equations to eliminate the quadratic nonlinear term, a major contributor to pull-in instability. Although higher-order even nonlinearities still persist, this modification significantly delays the occurrence of pull-in instability.
Moreover, by establishing appropriate control systems, counteracting even-nonlinear terms can be generated at critical points. This helps maintain the stability of the MEMS system and effectively prevents pull-in motion. These methods contribute to enhancing the performance, reliability, and lifespan of MEMS devices, thus opening up new avenues for the development of more advanced MEMS technology.
Despite these achievements, challenges such as the intricate interplay of various nonlinear factors and the difficulty of accurately predicting and controlling system behavior still impede MEMS research and development. Future research should concentrate on a more in-depth understanding of MEMS nonlinear dynamics and the development of more efficient strategies to address these challenges, with the aim of further promoting the development and application of MEMS technology.
AI-assisted modeling 134 emerges as a powerful approach to address these challenges. Leveraging machine-learning algorithms and physics-informed neural networks, it can capture the complex nonlinear behaviors of MEMS with enhanced accuracy and efficiency. This not only improves the performance of MEMS-based devices in various application fields but also offers effective solutions for eliminating pull-in instability.
AI-assisted modeling
AI-assisted modeling 134 is designed to depict complex dynamic systems accurately. Consider a spring as an example. Conventionally, a spring’s behavior is assumed to be periodic. However, in real-world MEMS applications, it is influenced by both the host system and external environmental factors. Over time, factors such as fatigue, aging, sudden shocks, and pollutant accumulation can transform a spring from a linear to a nonlinear component. As a result, traditional models based on simple linear assumptions become less accurate.
For porous MEMS beam structures, we propose an AI-assisted governing equation.



The weighting factors can be determined by the deeping learning technology, or they can be controlled by AI-structure system.
This equation, which incorporates fractional derivatives and multiple weighting factors, can better capture the complex behaviors of the beam. The fractional derivative is a combination of various fractional derivatives with different properties, enabling a more accurate description of the material’s behavior at different scales. The weighting factors, which can be determined by deep-learning technology or controlled by an AI-structure system, play a crucial role in adjusting the equation to fit different MEMS scenarios.
For the single-degree-of-freedom (SDOF) model, the AI-assisted MEMS model is also formulated.

This model takes into account the complex nonlinearities in MEMS, such as electrostatic coupling and material hysteresis, providing a more accurate representation of the system’s behavior compared to traditional models.
An auxiliary DC source in the MEMS system
We designed an MEMS system with an auxiliary DC source, see Figure 6. In this system, there are two power sources: one for normal operation and the other as an auxiliary source. An auxiliary DC source in the MEMS system.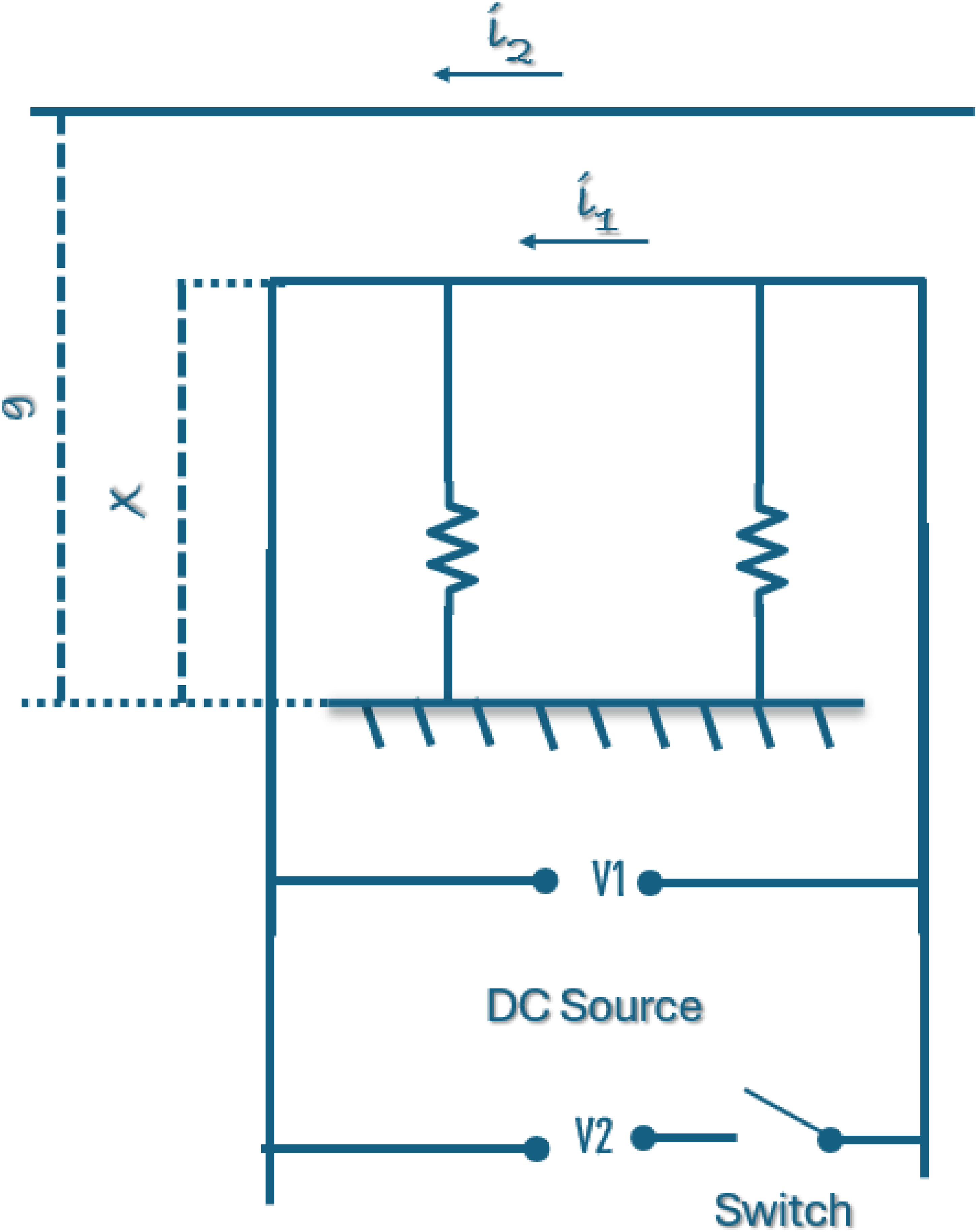
When the auxiliary source is activated by a switch, it changes the applied voltage, thereby altering the governing equation of the system.

The sign of the voltage change, determined by the positive and negative poles of the auxiliary power supply, has a significant impact on the MEMS system. A positive-signed voltage change can accelerate the pull-in process, while a negative-signed change can effectively prevent it. This is of utmost importance for maintaining the stability and normal operation of MEMS devices. For example, in MEMS sensors, preventing pull-in motion ensures accurate measurement results. If pull-in occurs, it can lead to errors in measuring physical quantities such as pressure or acceleration.
When the parameters k1 and k2 in the system are equal, an interesting phenomenon occurs: no pull-in phenomenon is observed. This state is highly valuable in MEMS device design and operation. Engineers can adjust these parameters to achieve this state, which helps optimize the performance of MEMS devices. In MEMS-based inertial navigation systems, for instance, ensuring k1 = k2 can enhance the system’s stability and accuracy by preventing the unwanted pull-in effect. It also has implications for the energy consumption and lifespan of MEMS devices, as the absence of pull-in reduces mechanical stress and wear, thus extending the device’s service life.
An auxiliary nanomagnet system
We also considered an MEMS system with an auxiliary acting force provided by nanomagnets, see Figure 7. In addition to the spring system, the nanomagnets introduce an additional force that can significantly affect the behavior of the MEMS device. An auxiliary acting force in the MEMS system.
Assuming the spring is linear, and the auxiliary acting force can be expressed as

The positive and negative signs of this force are determined by the attraction or repulsion of the nanomagnets. When the nanomagnets attract each other, it can trigger specific effects within the MEMS system. In MEMS resonators with magnetic tips, for example, the attraction between nanomagnets can cause a shift in the resonance frequency, which is crucial for the proper functioning of resonator-based sensors. When $a = 3k$ and $b = 5k$, the pull-in process can be effectively prevented.
Conversely, when the nanomagnets repel each other, they can counteract certain internal forces within the device. In MEMS switches with magnetic actuation mechanisms, the repulsion of nanomagnets can prevent the movable parts from approaching the fixed parts too closely, avoiding issues like stiction or premature contact. This is essential for maintaining the reliability and long-term performance of the MEMS switch.
The controlled interaction between nanomagnets can be used to tune the behavior of the MEMS system. By adjusting the distance between nanomagnets or their magnetic properties, engineers can precisely control the forces acting on MEMS components. This is particularly beneficial for applications that require high-precision control, such as in micro-optical devices where accurate positioning of MEMS-based mirrors is crucial for optical signal processing.
Conclusion and discussion
Micro-Electro-Mechanical Systems (MEMS) have emerged as a cornerstone of modern technology, finding extensive applications across diverse fields such as biomedical monitoring, inertial navigation, RF communication, and energy harvesting. Their miniaturization and multifunctionality have revolutionized various industries. However, the nonlinear dynamics inherent in MEMS, stemming from electrostatic coupling, geometric and material nonlinearities, and multi-physics interactions, pose significant challenges. Among these, pull-in instability, mainly induced by even-order nonlinear terms, is a critical issue that can lead to device failure, stiction, and irreversible damage.
This study has explored several effective strategies to overcome pull-in instability in MEMS. Re-engineering the spring in the MEMS oscillator by designing a specialized spring with a carefully formulated restoring-force formula can counteract the influence of even-order nonlinearities. This approach takes into account the device’s overall dynamics and material manufacturing aspects. Modifying the MEMS system’s structure, material properties, or governing equations to eliminate the quadratic nonlinear term, a major contributor to pull-in instability, significantly delays the occurrence of pull-in, although higher-order even nonlinearities still remain. Additionally, implementing suitable control systems can generate counteracting even-nonlinear terms at critical points, maintaining the stability of the MEMS system and preventing pull-in motion.
The integration of artificial intelligence (AI) into MEMS modeling has also shown great promise. AI-assisted modeling techniques, leveraging machine-learning algorithms and physics-informed neural networks, can capture the complex nonlinear behaviors of MEMS with enhanced accuracy and efficiency. This not only improves the performance of MEMS-based devices in various application fields but also offers effective solutions for eliminating pull-in instability. For example, AI-based structures can be used to design control systems that generate counteracting even-nonlinear terms at critical points, enabling the system to maintain periodic motion and avoid pull-in instability.
Despite these achievements, several challenges remain. The intricate interplay of various nonlinear factors in MEMS makes it difficult to accurately predict and control system behavior. The scarcity of data for AI models and the need to ensure model generalizability across different MEMS devices and operating conditions are also significant hurdles. Additionally, the impact of external factors such as temperature, humidity, and electromagnetic interference on MEMS performance needs to be further investigated.
Future research will focus on three critical areas to advance this work: 1. Experimental validation of prototypes: Fabricating specialized springs and auxiliary systems via deep reactive ion etching (DRIE)139,140 and polysilicon deposition141,142 will enable rigorous testing under controlled electrostatic actuation. Experiments will quantify pull-in suppression across temperature (25–125°C) and humidity (10–90% relative humidity [RH]) ranges using laser Doppler vibrometry and capacitive sensing to verify alignment with theoretical predictions.
Refinement of AI-physics hybrid models 143 : Integrating real-time experimental data into AI frameworks will improve the accuracy of predictions for manufacturing tolerances (e.g., ±5% stiffness variations). Transfer learning between MEMS device types (e.g., from cantilevers to micro-switches) will reduce training data requirements and accelerate design cycles.
Expanding to multi-physics scenarios 144 : Extending the framework to include fluid-structure interactions (e.g., microfluidic MEMS) and radiation effects will address a broader range of applications. This involves coupling fractional models with computational fluid dynamics (CFD) and validating them against high-fidelity simulations of bioconvective nanofluid flows. This builds on the methodologies of recent studies.27–35
In conclusion, the research on MEMS nonlinear dynamics and the strategies to overcome pull-in instability have made significant progress. However, continued efforts are required to fully unlock the potential of MEMS technology and address the remaining challenges. This will not only benefit the MEMS industry but also have a far-reaching impact on multiple application fields that rely on MEMS technology.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by Guangdong Basic and Applied Basic Research Foundation (No.2022A1515111135 & No.2025A1515010407).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.