
Abstract
The magnetically tunable modulus of soft magnetorheological elastomer offers broad applications in vibration control. This material exhibits an obvious Payne effect that the dynamic modulus decreases as the strain amplitude increases. It is necessary to analyze the influence of amplitude-dependent modulus and nonlinear viscoelastic behavior for the application of soft magnetorheological elastomer in vibration control. A fractional viscoelastic constitutive model is developed in a nonlinear manner to depict the dynamic mechanical behaviour of soft magnetorheological elastomer accurately and provide guidance for applications in vibration control. Model parameters are identified by minimizing the standard error ratio of dynamic modulus. The numerical calculations and the experimental data are used for model validation. This nonlinear fractional viscoelastic model has superior ability to describe the stress-strain hysteresis curve compared with the revised Bouc-Wen model and the linear fractional viscoelastic model. The effects of nonlinear viscoelasticity on the dynamic behavior of vibration isolation systems are presented, and the amplitude dependence is found to be beneficial to the isolation performance. A control algorithm based on a switchable magnetic field that depends on load frequency is employed as an example to enhance the vibration isolation performance for the application of soft magnetorheological elastomers. This study reveals the inherent characteristics of soft magnetorheological elastomer and provides a theoretical basis for its vibration control design in practical applications.
Keywords
Introduction
Magnetorheological elastomer (MRE) is composed of magnetizable particles embedded in elastic matrices. The material is isotropic when particles are distributed randomly. In contrast, it is anisotropic as particles are distributed directionally.1,2 The magnetizable particles are either magnetically soft or hard, and magnetizable particles in soft MRE (s-MRE) can be easily magnetized and demagnetized.3,4 When magnetic fields are applied to s-MRE, there are enhanced modulus and obvious magnetostriction, which is known as the magnetorheological (MR) effect. The mechanical characteristic of magnetically controllable modulus offers broad application in vibration absorbers,5,6 isolators7–9 and vehicle suspensions,10,11 and increasing efforts are also devoted to the application of the magneto-induced deformation in magnetic actuators and soft robotics.12,13 In comparison, the s-MRE structure for magnetic actuation is slenderer than that for vibration control, and the required magnetic field strength of s-MRE for magnetic actuation is lower than that for vibration control.
For the practical applications of MRE in both vibration control and magnetic actuation, modelling the mechanical behaviour is an essential basis. Constitutive models focusing on the enhancement of dynamic modulus of MRE attracted significant attention, to investigate the influence of the magnetic field on the viscoelastic behaviour and the controllable modulus for the design of vibration control.14,15 As Maxwell stress dominates the magnetic-induced deformation rather than the enhancement of modulus, the magneto-mechanical theory can be simplified to describe the macroscopic performance of magnetic actuation.16,17
On–off control, 18 H-infinity control, 19 sliding mode control and fuzzy control have been applied to s-MRE based vibration systems.20,21 Time compensation strategy and phase compensation strategy have been adopted for the time delay of s-MRE.22,23 As the demand for control strategies increases in s-MRE based vibration systems, accurate models need to be developed to capture the nonlinear viscoelasticity of s-MRE. While most literature has focused on the quasi-static behavior of s-MRE, it is important to note that s-MRE is sensitive to both frequency and strain amplitude.24,25 Classical viscoelastic models, such as the Kelvin-Voigt model, Maxwell model and Zener model, fail to accurately describe the dynamic behavior of s-MRE within a wide range of strain and frequency. To address this, Bouc-Wen, 26 Ramberg-Osgood, 27 Prandtl-Ishlinskii or other elements have been incorporated into viscoelastic models to better describe the dynamic mechanical behaviour of s-MRE. 28
Viscoelastic materials exhibit behavior intermediate between that of a viscous fluid and an elastic material, and the fractional derivative has been introduced to describe the stress-strain relation for viscoelastic materials.29,30 However, to predict the magneto-mechanical coupling behavior of s-MRE, which is inherently soft, an assumption of finite strain range must be applied. 31 Besides of the intrinsic viscoelasticity, the s-MRE material also exhibits pronounced Payne effect, Mullins effect and temperature dependence,32,33 which are typical behaviors of filled rubber.32,34 Experimental studies demonstrate that the dynamic modulus of s-MRE decreases when the strain amplitude increases,1,2,24,25 and the transition behavior of s-MRE occurs at a certain temperature as the dynamic modulus exhibits different trends with the temperature variation. 35 Considering potential nonlinear oscillation in certain scenarios of s-MRE-based systems, constitutive models with the strain amplitude dependence are preferable to accurately depict the nonlinear viscoelastic behavior.36,37 Taking into account the amplitude dependence of s-MRE, the constitutive model remains insufficiently developed, and the influence of nonlinear viscoelasticity on the dynamic behavior of s-MRE-based isolation systems needs to be explored to advance practical applications. This paper incorporates the amplitude dependence of s-MRE into its viscoelastic constitutive model and investigates the influence of nonlinear viscoelasticity on s-MRE-based vibration isolation systems.
In this paper, the experimental verification is conducted through the dynamic mechanical analysis (DMA) tests to investigate the amplitude dependent behavior and the nonlinear viscoelasticity of s-MRE. Subsequently, a nonlinear fractional viscoelastic constitutive model is developed to capture the amplitude-dependent behavior, incorporating a magnetic spring to account for the magnetic field-dependent behavior. Model parameters are identified by optimizing the standard error ratio of dynamic modulus, and the model validation is performed using the numerical calculation and experimental data of the stress-strain hysteresis curve. Compared with the Bouc-Wen model and the linear fractional viscoelastic model, this nonlinear fractional viscoelastic model demonstrates superior accuracy. Furthermore, the influence of nonlinear viscoelasticity on the dynamic behavior of s-MRE-based isolation systems is analyzed, and the isolation efficiency is improved through a control algorithm that employs a switchable magnetic field. In comparison with linear fractional-order models, the amplitude dependence of s-MRE is found to be beneficial to the vibration control effect. This work aims to provide theoretical basis and guidance for the design of s-MRE-based vibration control systems.
Nonlinearity on dynamic mechanical properties of s-MREs
S-MREs and DMA experiments
The investigated type of s-MRE was produced as follows. The carbonyl iron powder (Sigma-Aldrich, US) was chosen as the magnetizable particle because of its low remnant magnetization, and the silicone rubber (Wacker Chemie AG, Germany) was selected as the matrix due to its good elasticity. During the fabrication of particle-reinforced rubber, different particles and rubbers were selected to obtain good long-term stability, which is a necessary consideration for s-MRE. Compared to MR fluids, s-MREs have better stability. The shape and dimensions of samples folowed the BS ISO 4664-1:2011, as shown in Figure 1(a), and the magnetic field was produced by neodymium disc magnets (E-magnets, UK) of various dimensions. Other details of s-MRE samples can be found in the illustration of a previous experiment.
38
In Figure 1(b), the DMA tests for s-MREs in shear mode used Instron Electropuls E1000. The range of strain amplitude from 1 % to 5 % was selected to examine the amplitude dependence and nonlinear viscoelasticity of the mechanical properties of s-MREs. During the testing the displacement and load were tracked along the vibration directions which was vertical in Figure 1(b), and the direction of external magnetic field was parallel to magnetic particle chains which were oriented horizontally. DMA tests of s-MRE in shear mode (a) samples and (b) experimental setup.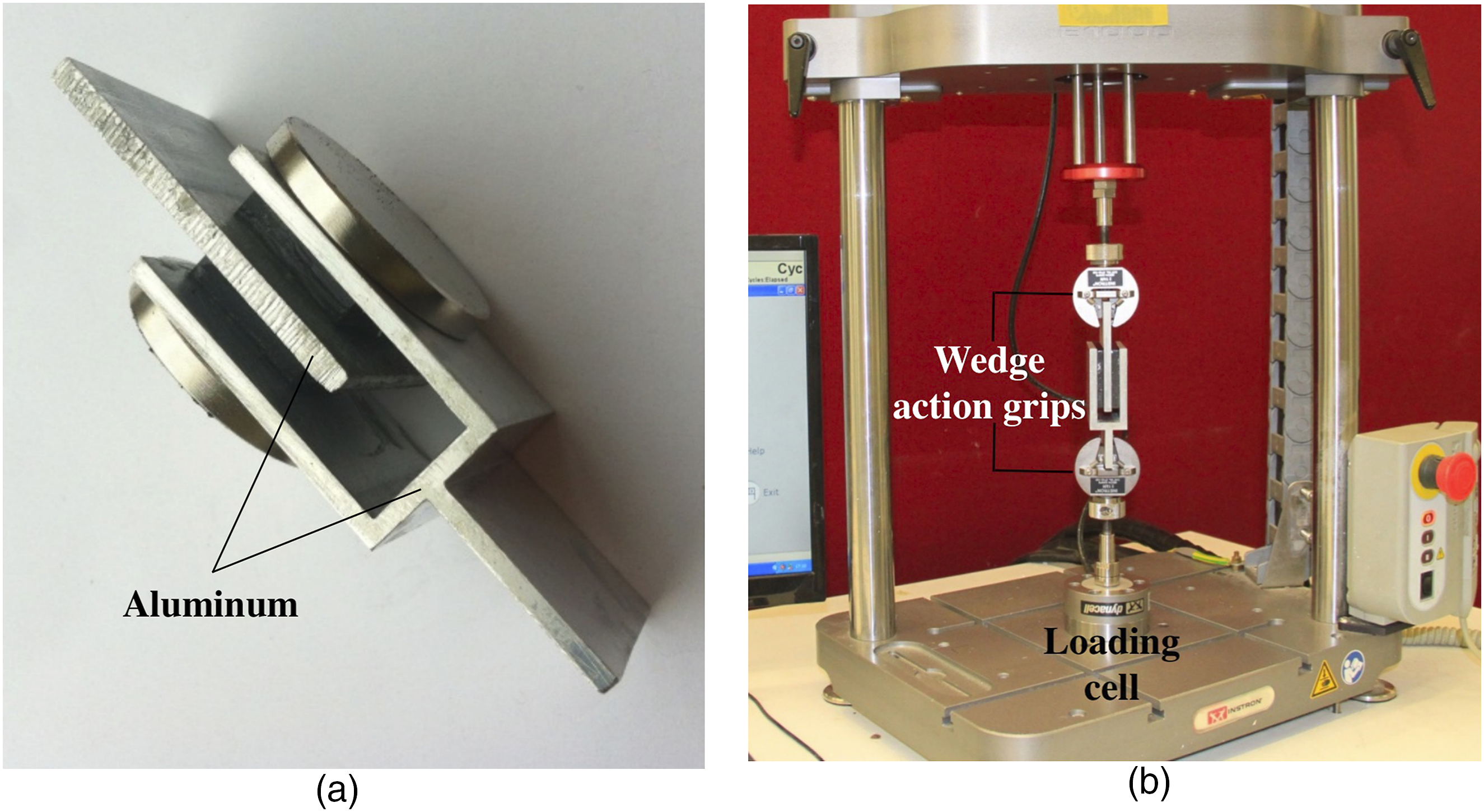
Amplitude dependence of the modulus
As a kind of particle-reinforced rubber, s-MRE material responds to a sinusoidal load with a time delay. The dynamic shear modulus of s-MRE is mathematically considered as a complex modulus, comprising both a real part and an imaginary part.


The ratio of the standard error of estimation S
e
to the standard error of deviation S
d
is defined as the standard error ratio S
e
/S
d
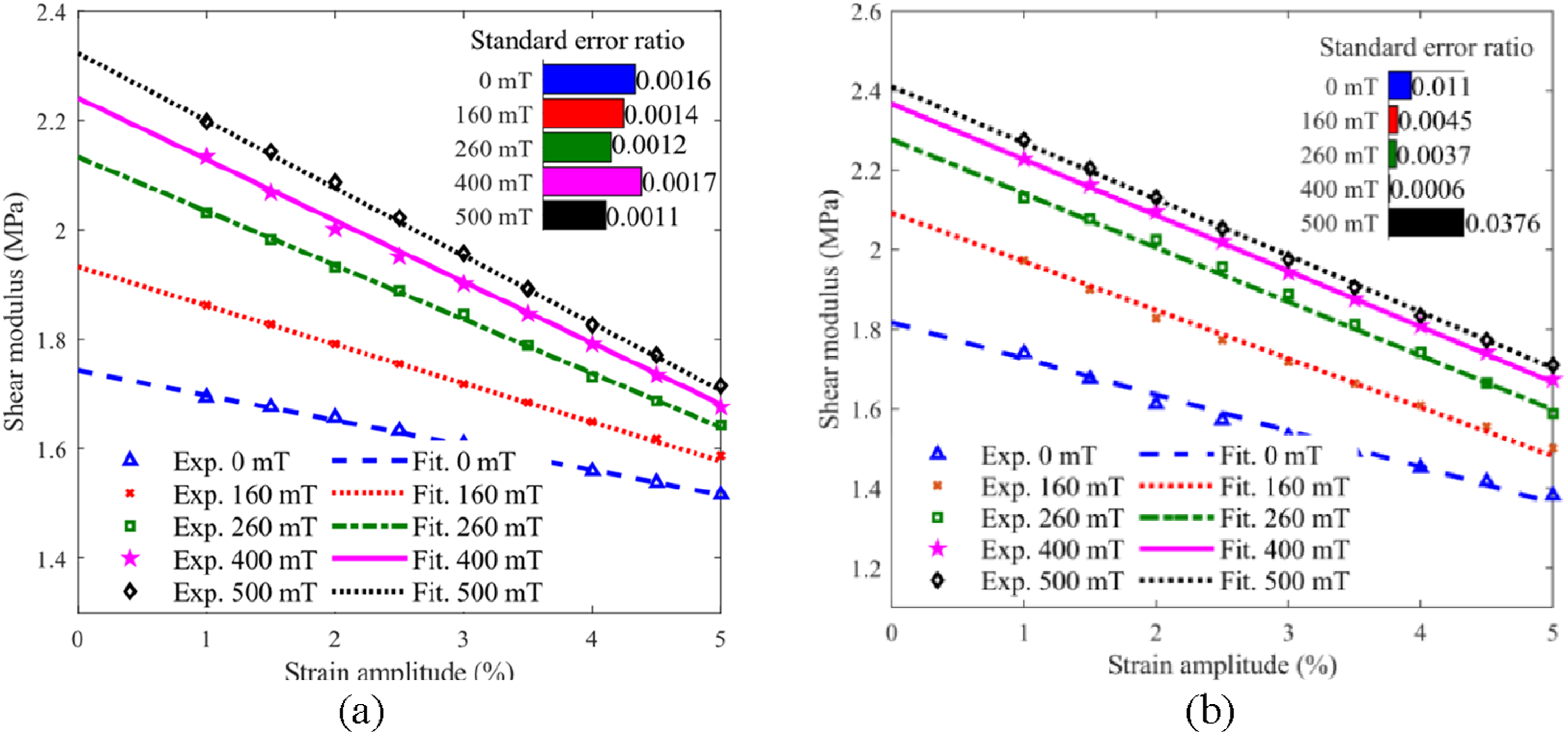
, which is selected as a dimensionless statistic to reflect the quality of curve-fitting in Figure 2, avoiding the influence of different sizes and orders of magnitude. The standard error ratio can be defined as Experimental data and fitted results of shear modulus with different strain amplitudes at frequency of (a) 1 Hz and (b) 5 Hz. Experimental data and fitted results of shear modulus with different strain amplitudes at frequency of (a) 10 Hz and (b) 50 Hz.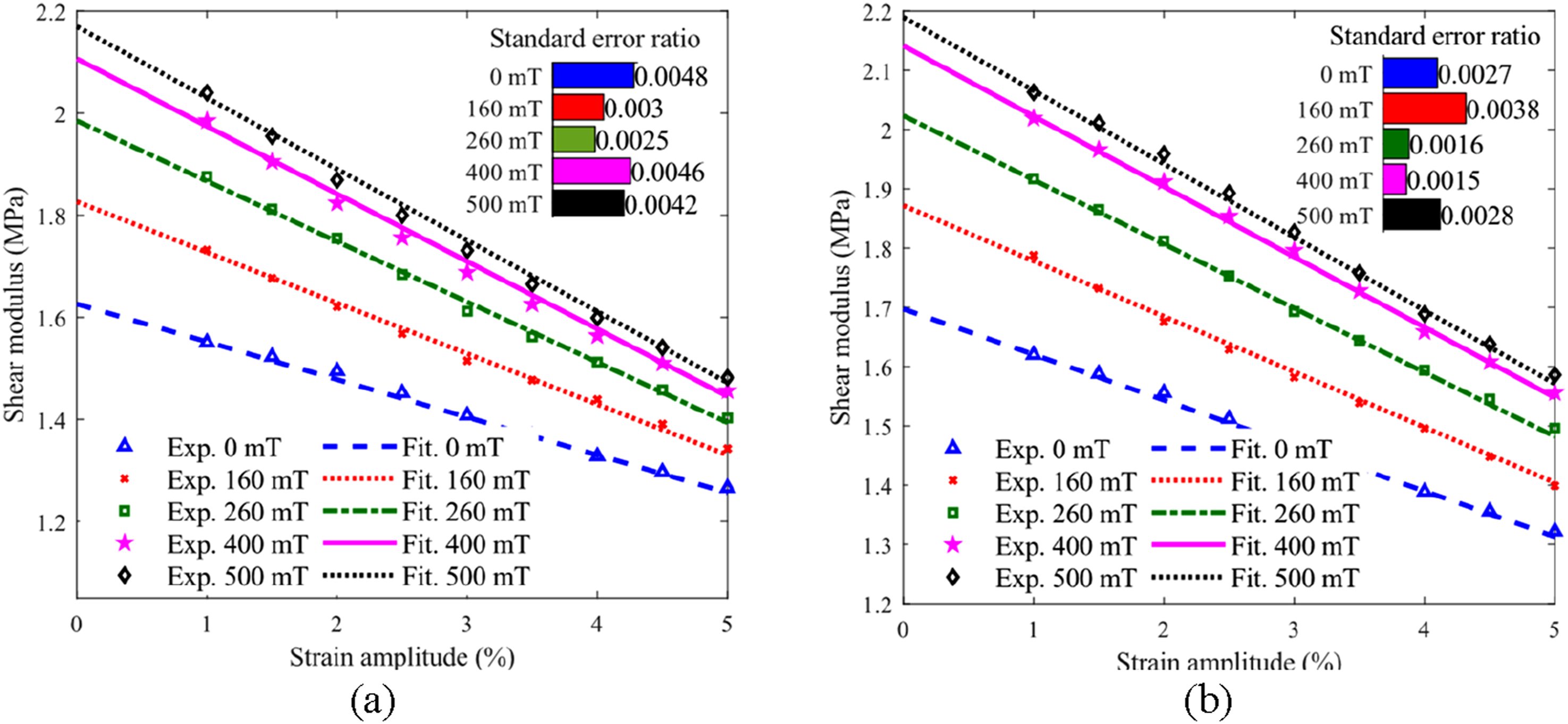

Mathematical modelling for s-MREs
Mathematical models for s-MREs
For viscoelastic materials, the simplest models are the classical Maxwell and Kelvin-Voigt rheological models, in which there are only two components including an elastic spring and a Newtonian dashpot. It is hard to obtain quantitative agreement with experimental data using simple models. Meanwhile, more complex models are more time-consuming, due to the increased number of fitting parameters. The fractional Zener model has been found to be a good solution to balance complexity and accuracy.30,39
As one of the most accurate rheological models, it is justified to select the fractional Zener model incorporated with a magnetic spring to present the magnetic field-dependent behavior as shown in Figure 4, where the relationship between the stress τ(t) and the strain γ(t) (referred to Appendix A) can be expressed as Fractional viscoelatic model of s-MRE.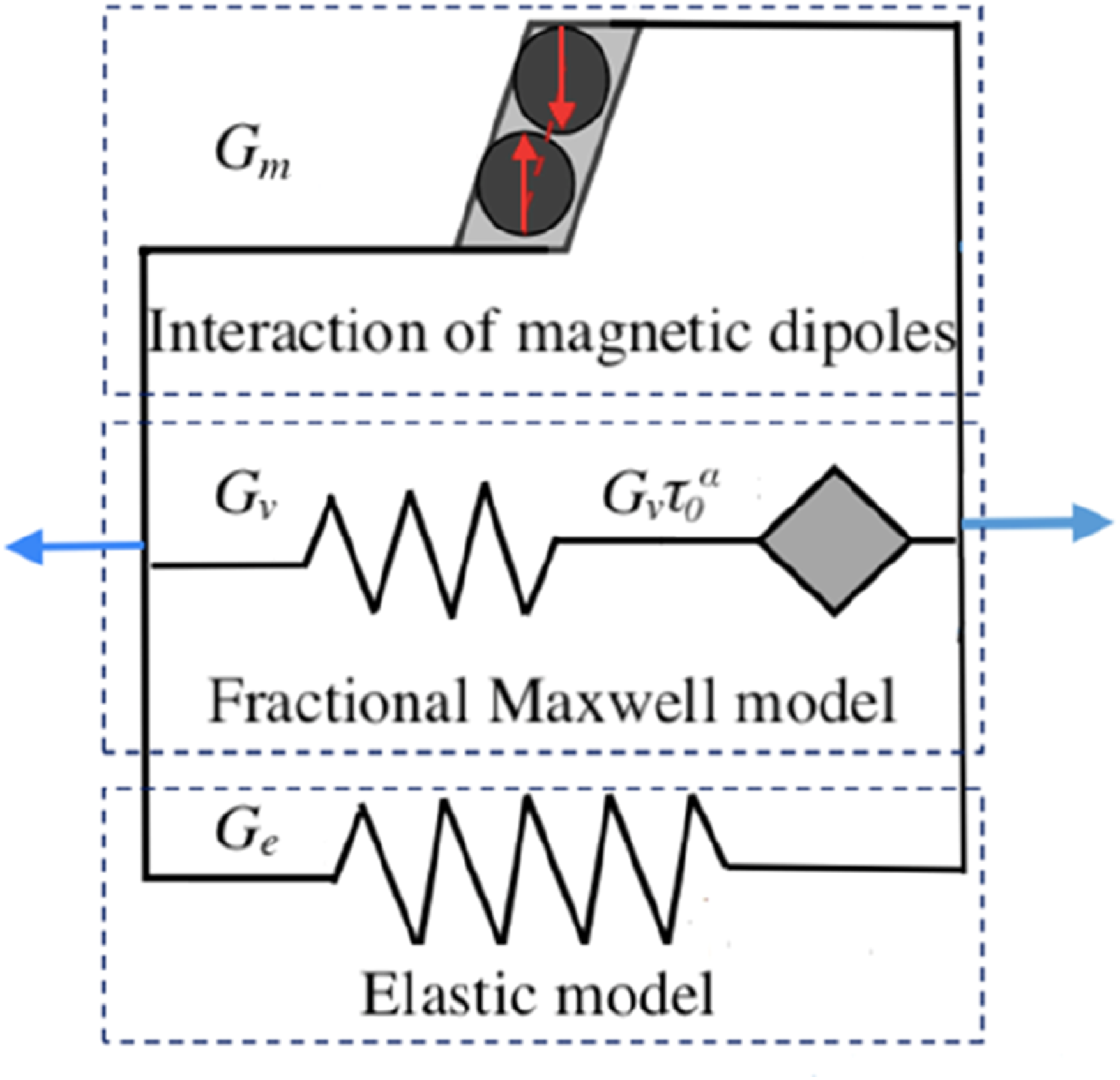

When the nonlinear viscoelasticity is introduced to depict the amplitude dependence, the modulus can be expressed as

As a commonly chosen type of fractional derivatives, the Caputo derivative owns practically measurable initial conditions, whose physical meanings are well understood. Using the predictor-corrector approach to solve Caputo fractional differential equations,40,41 the stress-strain relation in the fractional Zener model can be numerically calculated for equation (5).
Figure 5 shows the influence of fractional order α and nonlinear coefficient β on hysteresis loops of s-MREs. In Figure 5(a), when the fractional order α increases, the viscosity of the material increases, and the slope of ellipse increases, which means the shear modulus increases. The area enclosed by the hysteresis loop is calculated by the numerical integration as the dissipating energy. The area of the ellipse in Figure 5(a) increases as the fractional order α increases, which indicates the ability to dissipate energy increases. In Figure 5(b), the slope of ellipse decreases as the nonlinear coefficient β increases, so the shear modulus decreases when the amplitude dependence increases. But the area of ellipse barely changes when the nonlinear coefficient β varies. Viscoelastic stress response of different (a) fractional-orders and (b) nonlinear coefficients.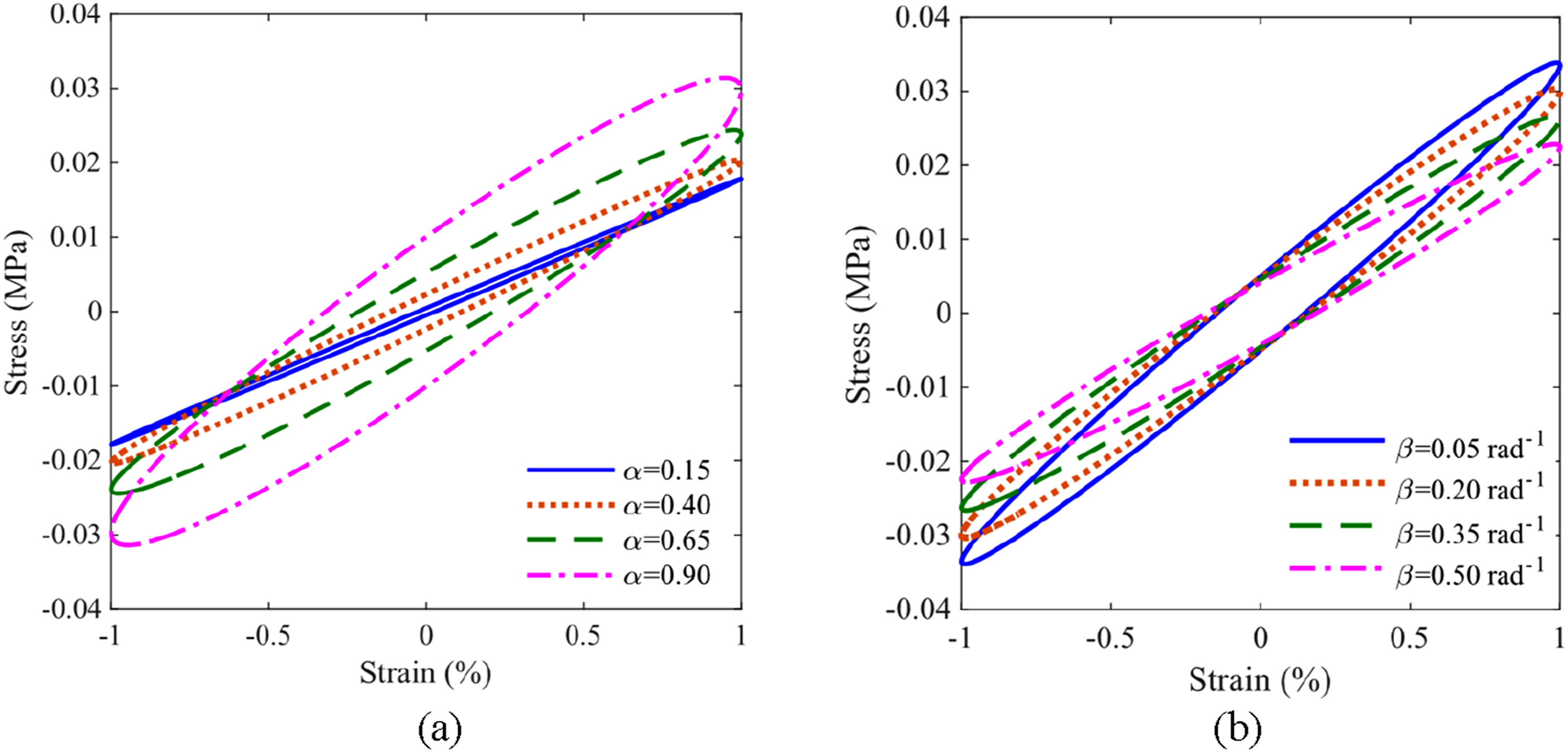
Parameter identification
When viscoelastic problems are converted into elastic problems through the Fourier transform, the storage modulus and loss modulus are expressed as functions od the frequency (referred to Appendix A). When nonlinear viscoelasticity is introduced to depict the amplitude dependence, the storage modulus G′ and the loss modulus G″ are expressed as follows


The model parameters can be identified by minimizing the sum of standard error ratios as

If i = 1, the data sample y is the experimental data of storage modulus G'; alternatively, the data sample y is the experimental data of loss modulus G″ if i = 2.
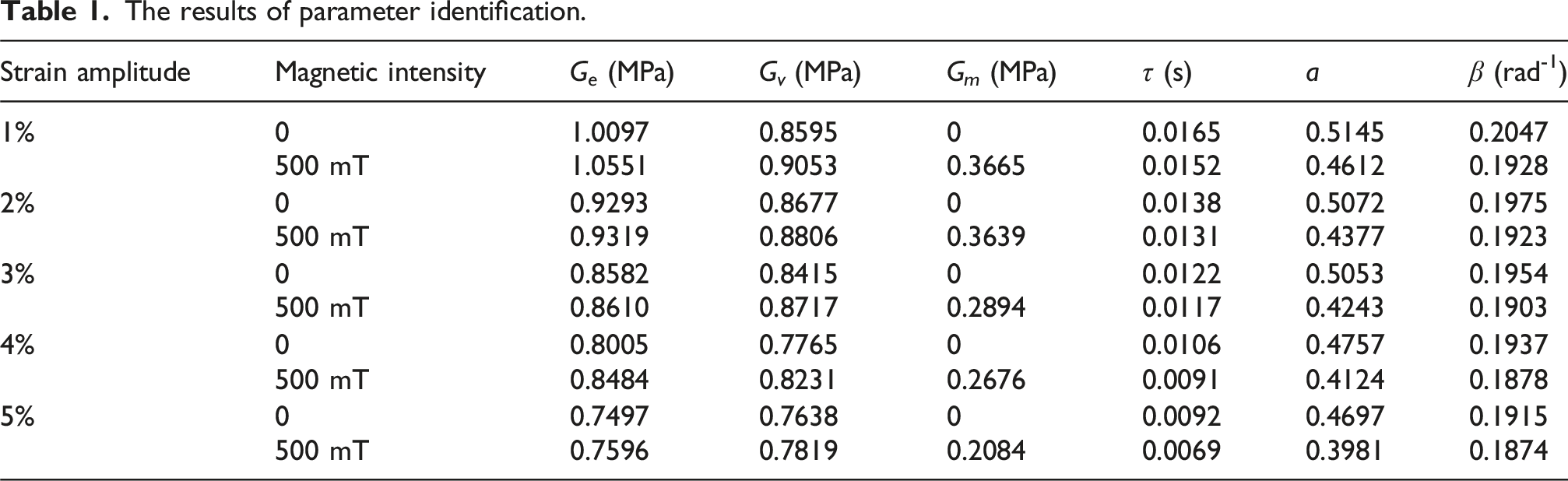
As shown in Figure 6, the curve-fitting exhibits a quantitative agreement with experimental data, and the dependence of modulus on the frequency can be also observed. Both the storage modulus G′ and the loss modulus G″ are constant with variable strain amplitude for linear viscoelastic materials (β = 0), while both the moduli vary with the strain amplitude for nonlinear viscoelasticity, as shown in Figure 6. The parameter identification was carried out for magnetic fields of 0 and 500 mT, and the results are listed in Table 1. Experimetnal data and fitted results on the frequency dependence of (a) storage modulus and (b) loss modulus. The results of parameter identification.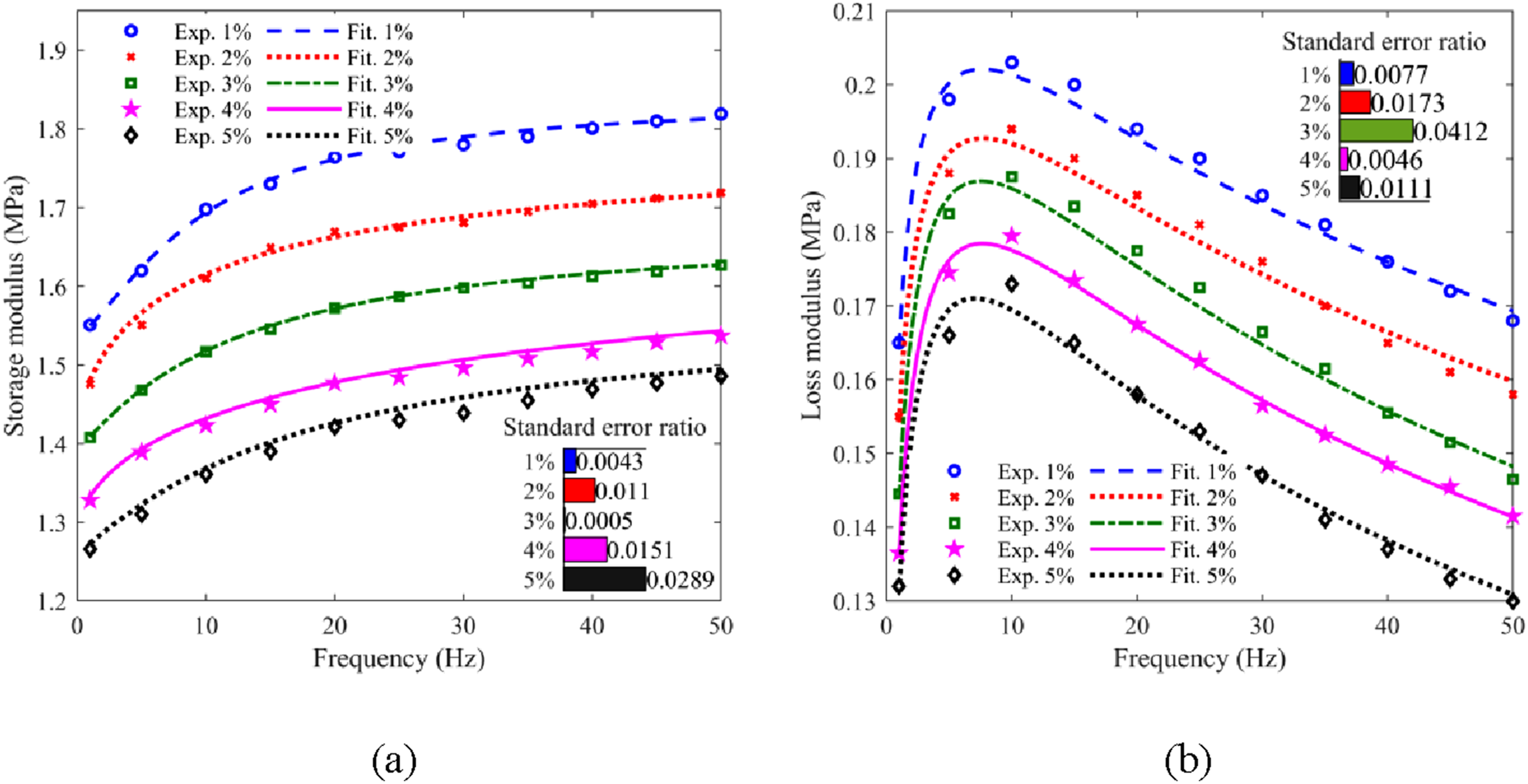
It has been found that when the magnetic field intensity is below 500 mT, the dynamic shear modulus magnitude of s-MRE can be increased linearly by strengthening the magnetic field.1,2 Due to the saturation magnetization, above a certain value of magnetic field intensity, the modulus magnitude of s-MRE cannot be effectively increased any more by further strengthening the magnetic field.
Numerical solution and validation
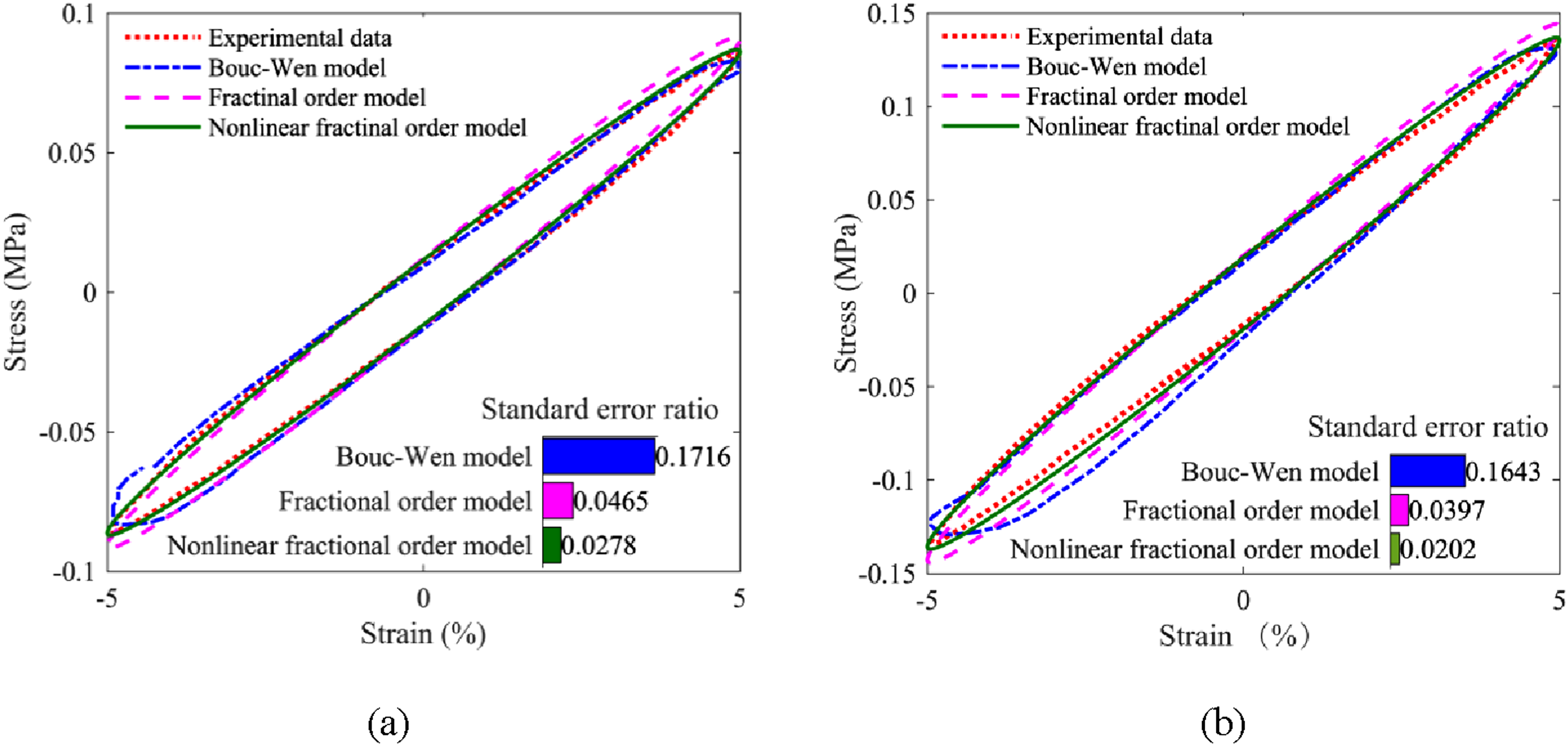
The numerical results of equation (5) can be used to depict the stress-strain hysteresis curve for s-MREs. The numerical calculations of different models are compared with experimental data in Figures 7 and 8, where the dimensionless standard error ratio is calculated to validate the curve fitting. The nonlinear fractional-order model performs better in depicting the stress-strain relation of s-MRE than the revised Bouc-Wen model (referred to Appendix B) and the fractional-order model.30,39 Experimental data and predicted results of stress-strain hysteresis loops with a strain amplitude of 1% in a magnetic field of (a) 0 mT and (b) 500 mT. Experimental data and predicted results of stress-strain hysteresis loops with a strain amplitude of 5% in a magnetic field of (a) 0 mT and (b) 500 mT.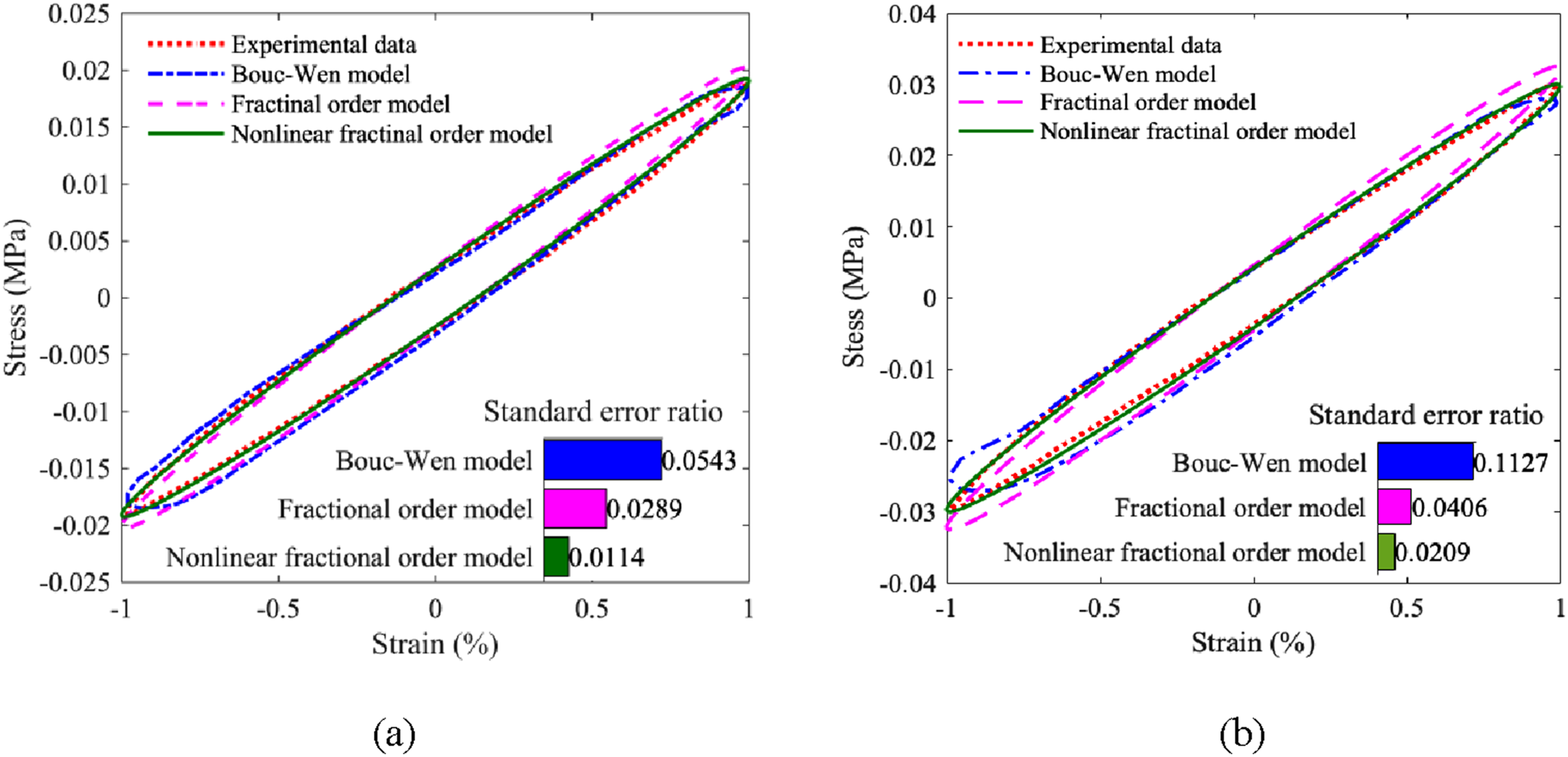
Dynamical analysis of s-MRE vibration systems
Vibration isolation against harmonic force
As a kind of magnetically sensitive rubber, s-MRE materials can be used for vibration isolation, and the nonlinear fractional viscoelastic model can be introduced to describe the force-displacement relation. When the vertical direction is the only considered direction, the schematic diagram of a vibration isolation system is shown in Figure 9, where the machine represents a rotating machine or sensitive equipment, and the foundation is either fixed or flexible. When the DMA tests of s-MREs were performed under harmonic load, vibration isolation systems herein also experience harmonic load. The influence of viscoelasticity was studied in s-MRE-based vibration isolation systems,
42
and this piece of work focuses on the nonlinear system stiffness, which results from the amplitude dependence of the modulus of s-MREs. The dynamic analysis in this study is limited to single-degree-of-freedom systems, while multi-body systems and rigid-flexible coupled systems need to be considered in practice. Schematic configuration for the model of s-MRE-based isolation system.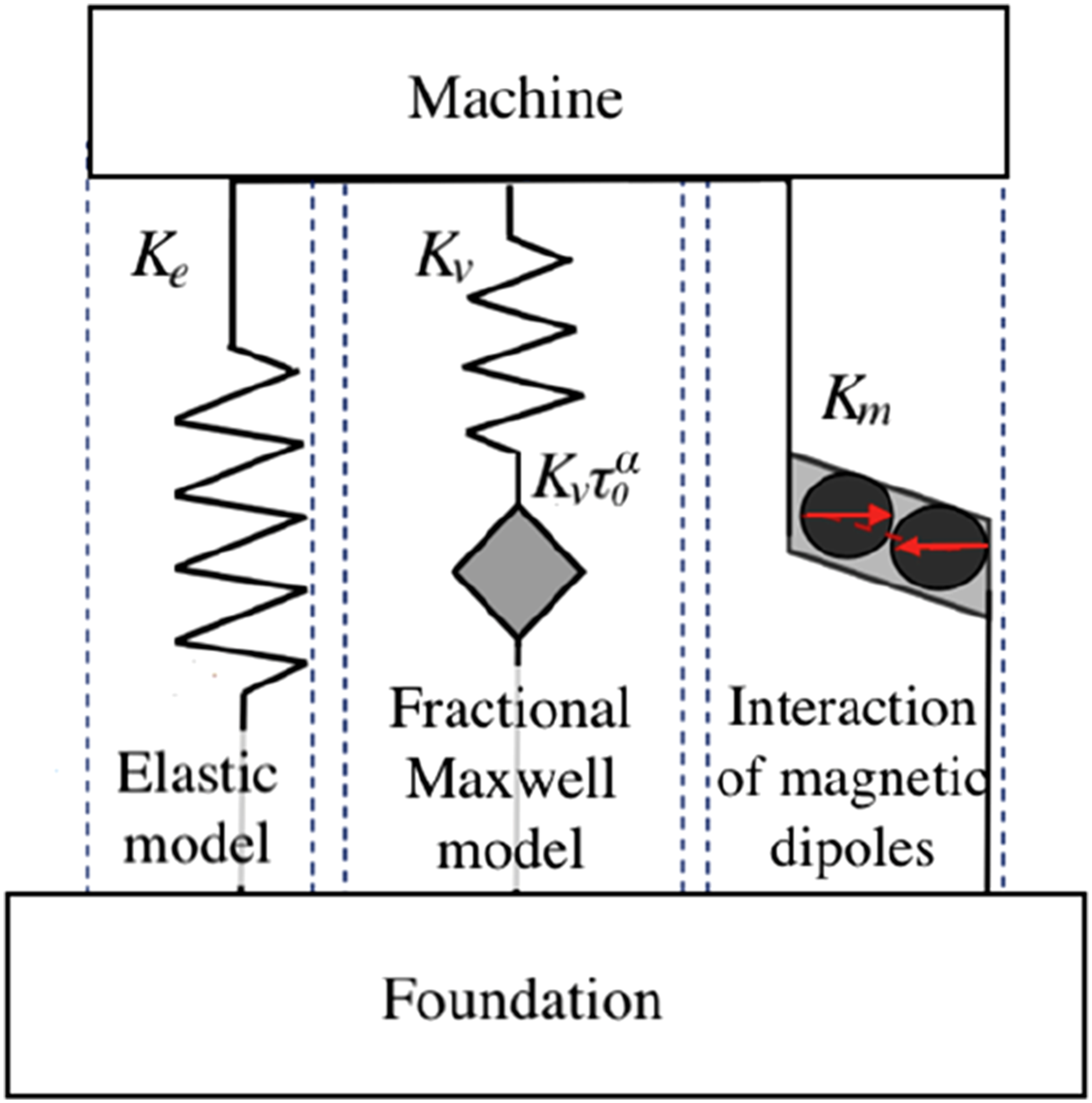
When the s-MRE is used to protect the foundation against the exerted loading, dynamic differential equations can be written as follows

Figure 10 displays the influence of amplitude dependence on the transmissibility of this isolation system in the frequency domain. The nonlinearity of the system stiffness β = 0, regardless of the amplitude dependence; however, when the amplitude dependence is considered, the nonlinear coefficient β ≠ 0. As the nonlinear coefficient β increases from 0 to 0.6 rad-1, the resonance frequency is reduced from 16.1 Hz to 8.0 Hz, which is in agreement with the observation that the material stiffness decreases when the nonlinear coefficient β increases in Figure 5(b). At the resonance frequency, the maximum peak can be observed on the transmissibility curves. As the amplitude dependence of s-MRE increases with the nonlinear coefficient β, the maximum peak transmissibility decreases from 12.76 to 11.91 (1.106 dB to 1.076 dB). The decrease in system stiffness due to increased amplitude dependence of s-MRE, as a result, the amplitude dependence is beneficial to the reduction of the force transmitted to the foundation. To improve the performance of vibration isolation, both the peak transmissibility and the resonance frequency can be lowered by increasing the nonlinear coefficient β, which can be achieved by enhancing the amplitude dependence of s-MRE during the fabrication. Influence of the nonlinear coefficient on the transmissibility against harmonic forces.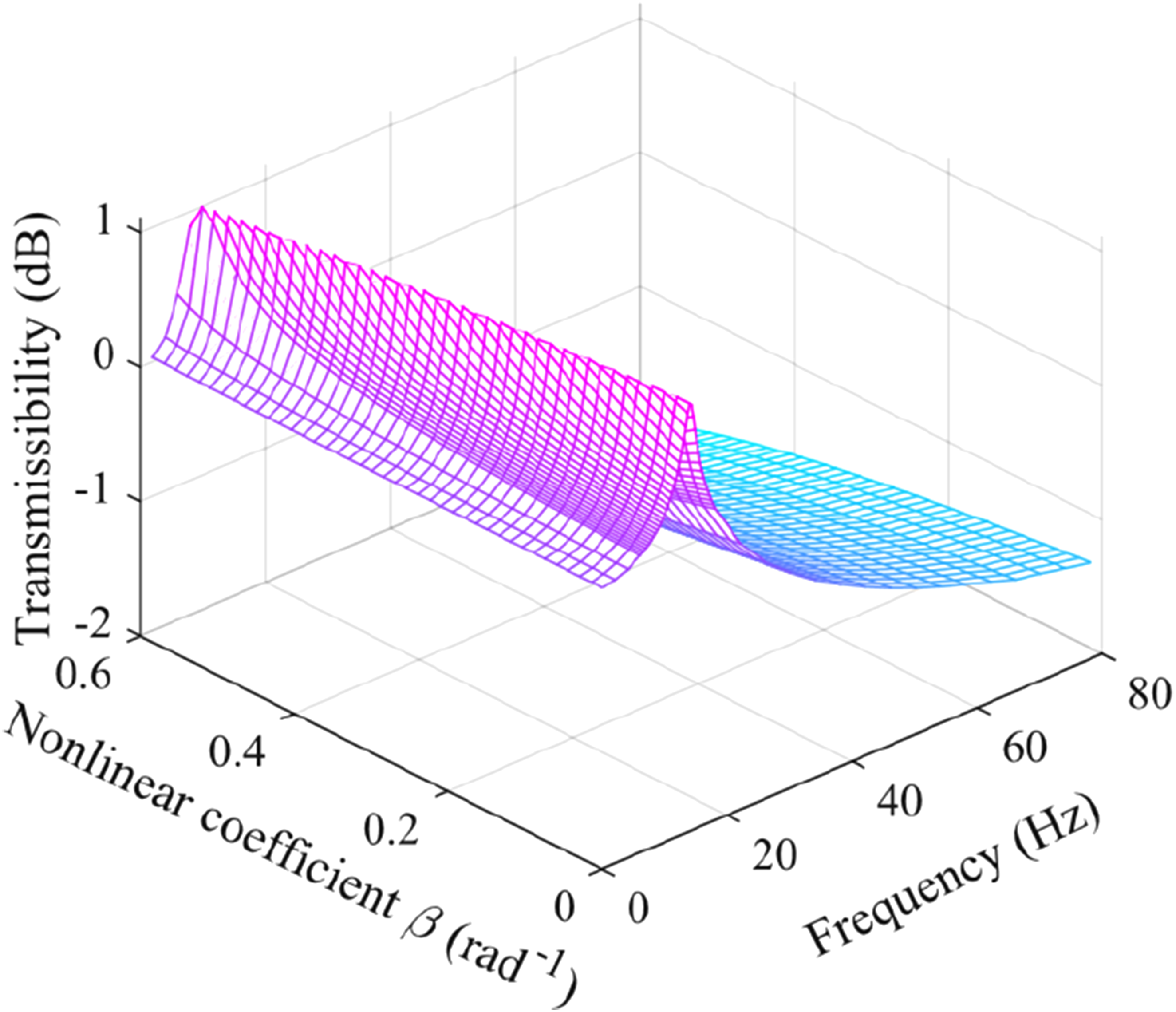
For the concern over magnetization efficiency, the ideal range of magnetic flux density for controllable properties of s-MRE is found to be below 500 mT, where the modulus of the material can be increased linearly with the increasing magnetic field intensity.1,2 In comparison with traditional vibration isolation, the isolation effect can be further improved by switching the state of the external magnetic field at a certain frequency f
s
, where the transmissibility without a magnetic field and in a magnetic field of 500 mT are the same. The control strategy can be illustrated as
When the performance of vibration isolation is studied in switchable magnetic fields, the maximum peak transmissibility occurs at the switch frequency f
s
. If the amplitude dependence of s-MRE is neglected, the nonlinearity of the system stiffness β = 0; while the amplitude dependence is considered, the nonlinear coefficient β ≠ 0. In Figure 11, as the amplitude dependence of s-MRE increases with the nonlinear coefficient β, the switch frequency decreases from 17.9 Hz to 9.5 Hz, and the peak transmissibility decreases from 3.75 to 1.66 (0.574 dB to 0.220 dB). The nonlinear coefficient β can be increased by enhancing the amplitude dependence of s-MRE during fabrication, which is beneficial to the improvement of isolation performance from the perspective of lowering both the switch frequency and the peak transmissibility. In comparison with the traditional passive isolation system, the peak transmissibility is reduced by 48.0% to 78.7% in switchable magnetic fields. Influence of the nonlinear coefficient on the isolation effect against harmonic forces.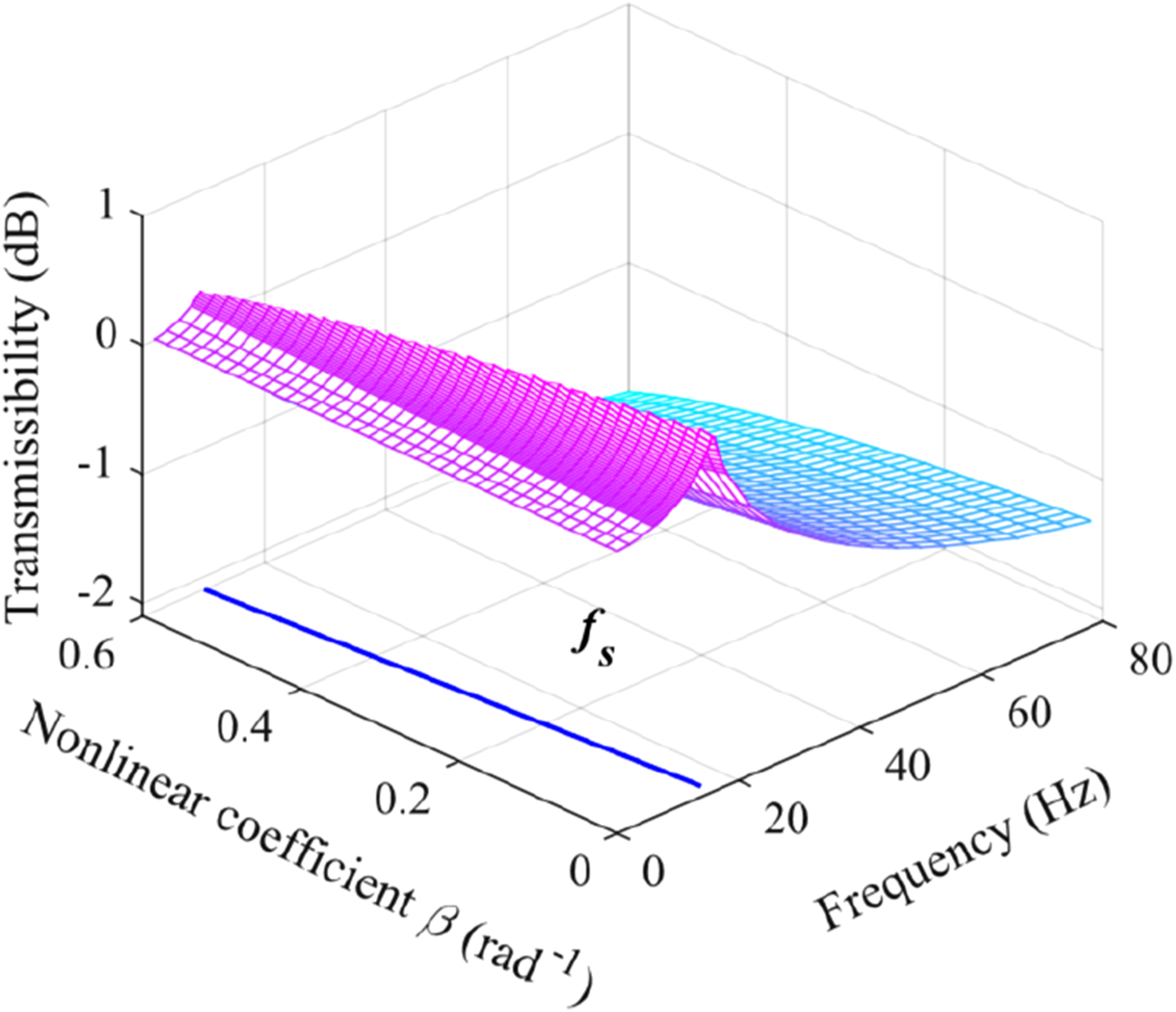
Vibration isolation against harmonic motion
In Figure 9, when the s-MRE is used to isolate the machine from ground motions, dynamic differential equations can be written as follows

In Figure 12, as the vibration frequency increases to higher than 40 Hz, the transmissibility in the s-MRE-based isolation system against harmonic motions increases and the efficiency of vibration control decreases (but the transmissibility is still below unity, 0 dB), which is different from the transmissibility in the s-MRE-based isolation system against harmonic force. The response time of s-MRE is reported to be at the several milliseconds level.
19
As a result, the material deforms very slightly and even loses its elasticity at high frequencies, which then affects the performance of vibration isolation. Influence of the nonlinear coefficient on (a) the transmissibility and (b) the islation effect against ground motions.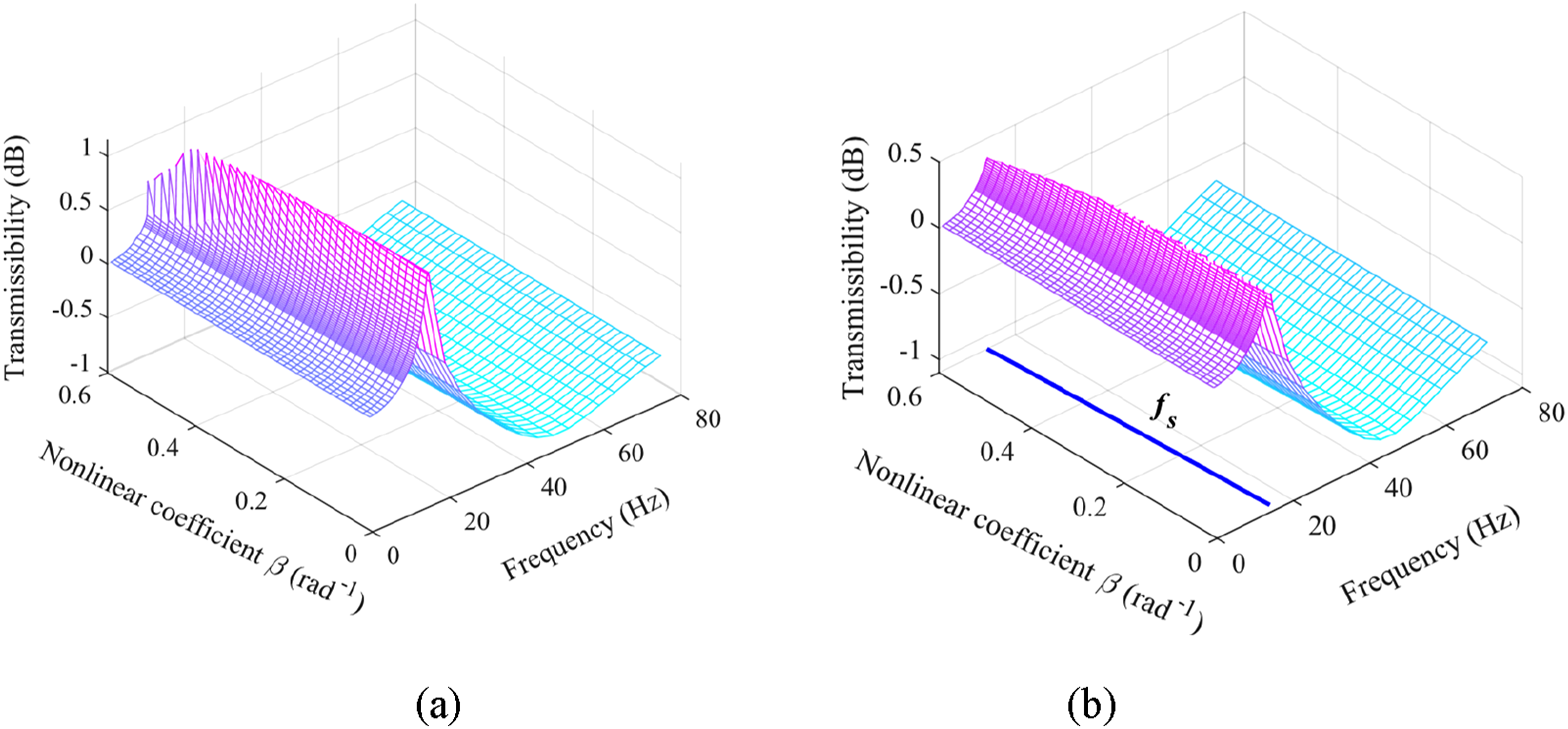
The influence of the amplitude dependence on the transmissibility of s-MRE based isolation systems in the frequency domain is shown in Figure 12(a). The nonlinearity of the system stiffness β = 0, regardless of the amplitude dependence; when the amplitude dependence is considered, the nonlinear coefficient β ≠ 0. As the nonlinear coefficient β increases from 0 to 0.6 rad-1, the resonance frequency is reduced from 16.2 Hz to 11.3 Hz. This is in agreement with the result of material stiffness shown in Figure 5(b), where the shear modulus of s-MRE decreases with increasing nonlinear coefficient β. When the amplitude dependence of s-MRE increases with the nonlinear coefficient β, the peak transmissibility decreases from13.7 to 6.01 (1.137 dB to 0.779 dB), but it barely changes until the nonlinear coefficient β is above 0.45 rad-1. When the nonlinear coefficient β is higher than 0.45 rad-1, the peak of the transmissibility curves is observed to become sharper, because the transmissibility increases faster to the maximum value as the frequency increases to the resonance frequency. It may result from the jump phenomenon and the stiffness softening, which can be enhanced by increasing the nonlinearity of system stiffness β. As the system stiffness decreases with increasing amplitude, the vibration transmitted to the machine is reduced at resonance frequencies. When low resonance frequency and low peak transmissibility are beneficial to the performance of vibration isolation, increasing the nonlinear coefficient β is an effective method, this can be realized by enhancing the amplitude dependence during the fabrication of s-MRE.
The control strategy in equation (11) is also adopted in this vibration isolation system. When the performance of vibration isolation is studied in switchable magnetic fields, the maximum peak of the transmissibility curves can be observed at the switch frequency f s . In Figure (12), as the amplitude dependence of s-MRE increases with the nonlinear coefficient β, the switch frequency decreases from 15.6 Hz to 12.7 Hz, and the peak transmissibility decreases from 4.32 to 3.63 ( 0.588 dB to 0.370 dB). Considering the nonlinearity of the system stiffness, enhancing the amplitude dependence is beneficial for the reduction of the maximum peak transmissibility and the improvement of the isolation performance. Compared with the system in a zero magnetic field, the peak transmissibility is reduced by 39.6 % to 68.5 % in switchable magnetic fields.
Conclusion and outlook
In this work, the amplitude dependence of mechanical properties for s-MRE is experimentally characterized. The dynamic modulus magnitude of s-MRE decreases with increasing strain amplitude. To address the influence of amplitude on the viscoelasticity, a nonlinear fractional-order model is developed for s-MRE. The nonlinear fractional-order model is compared with the Bouc-Wen model and the linear fractional viscoelastic model using the numerical calculation and experimental data of the stress-strain hysteresis curve. This nonlinear fractional viscoelastic model demonstrates superior precision in depicting the dynamic behavior of s-MRE. Additionally, the impact of nonlinear viscoelasticity is analyzed for s-MRE-based isolation systems. Enhancing the amplitude dependence of s-MRE is expected to improve the isolation performance.
Other than the intrinsic advance in revealing the insights into how the amplitude dependence affects the dynamic behaviour of s-MRE, this research is expected to contribute to the theoretical basis and the optimal design of s-MRE-based vibration isolation systems. It is feasible to enhance the amplitude dependence during the fabrication of s-MRE, and the technique has potential for commercial applications. Furthermore, the influence of nonlinear viscoelasticity on the dynamic behaviour of s-MRE-based multi-body systems and rigid-flexible coupled systems needs to be explored to further promote practical applications.
Footnotes
Acknowledgement
Financial support from the National Natural Science Foundation of China (grant numbers 12172279 and 12472031) is gratefully acknowledged. Additionally, the proofreading by Xiaochong Zhang is highly appreciated.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: National Natural Science Foundation of China (grant numbers 12172279 and 12472031).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
Data will be made available on request.
Fractional viscoelastic model
In the linear fractional viscoelastic model as shown in Figure 3, the elastic shear stress τ
e
(t) can be expressed as
The shear stress in fractional Maxwell model
The field-induced shear stress
As shown in Figure 3, the relationship between the total stress
The relationship between the stress
Substituting
Rationalizing the complex denominator
Separating the real and imaginary parts,