
Abstract
Refrigerators bring convenience to people, but the noise they produce can also affect people’s lives. Refrigerator noise is dominated by low-frequency noise, and the active noise control method is more effective for this kind of noise. However, the existing active noise control methods for refrigerators do not take into account factors such as the limited space and complex structure of the refrigerator compressor room, and external interference signals will be introduced to affect the noise reduction performance during the error signal collection. Given that, this paper proposes the cascade notch feedback algorithm, which can well reduce the influence of external interference signals to better achieve the refrigerator noise reduction. The algorithm consists of the cascaded notch filtering algorithm and the feedback algorithm. The cascade notch filtering algorithm is formed by cascading the adaptive notch filtering algorithm, which is used to deal with the main frequency and harmonic noise generated by the refrigerator. The feedback algorithm consists of a robust algorithm for dealing with external interference signals introduced during error signal collection. The simulation experiment proves that the algorithm has advantages in terms of noise reduction and computational cost compared with the adaptive notch filtering algorithm and the improved algorithm. The experimental test platform is set up to carry out the actual refrigerator noise reduction experiments under different conditions. The algorithm has the effect of noise reduction under different robust algorithms.
Introduction
Refrigerators are widely used in industrial and living fields because of their functions such as food preservation and cold storage, but the noise generated by the working of refrigerators can cause negative impacts. Some researchers have pointed out that people working in a noisy environment for a long time will be more likely to feel fatigue, lose concentration, reduce work efficiency, and even affect people’s normal life. 1 Refrigerator noise is mainly generated by the fan and compressor. Refrigerator manufacturers pay more attention to sealing the fan, to reduce the noise radiated to the outside, while the refrigerator compressor is soundproofed only through a baffle radiating much noise. Therefore, refrigerator noise is mainly generated by the refrigerator compressor.
Most of the researchers used passive noise control methods to control the noise generated by refrigerator compressors. Sheng et al. adopted magnetic suspension bearing technology to reduce the overall noise of the compressor. 2 Zhou et al. optimised the structure of the refrigerator compressor by changing the piping structure to reduce the noise of the refrigerator compressor. 3 Zhou et al. used rubber mats to experiment on refrigerator compressor noise to a certain extent. 4 Dou improved the structure of the silencer on the basis of the adder to control the noise of the refrigerator compressor so that the compressor noise reduction effect is more favourable. 5 Lan et al. proposed the retrofitting and damping springs and other improvement measures for noise reduction of refrigerator compressors, which is very good for high-frequency refrigerator compressor noise. 6 Mao et al. used a multilayer microporous plate absorber to attenuate compressor noise and experimentally demonstrated the possibility of noise reduction with this absorber. 7 He et al. proposed the use of half-wavelength tubes, Helmholtz resonant cavities, and multi-cavity series connection for noise reduction of refrigerator compressors, and carried out experiments to prove the feasibility of the program. 8
However, this method is usually excellent for high-frequency noise and has little effect on low-frequency noise. At the same time, the passive noise control technology has a high cost, so this paper uses active noise control methods to reduce refrigerator noise. Active noise control methods have the advantages of low cost and low computational cost, so the method has been widely used in various industries in recent years.9–11 In the past few years, some scholars have investigated active noise control algorithms in the field of refrigerator compressor noise control. Jung Mo Koo et al. used FxLMS algorithm to control the noise of refrigerator compressor, and the experimental results showed that the noise signal below 200 Hz remained unchanged, and the noise signal from 200 to 500 Hz decreased by about 3–10 dB. 12 J. Ku et al. applied a frequency weighting function to the FxLMS algorithm for controlling refrigerator compressor noise and respectively achieved 9 dB and 3 dB noise reduction at the first-dominant frequency (408 Hz) and second-dominant frequency (459 Hz) of the refrigerator compressor noise, with an overall noise reduction of 2.6 dB. 13 After a year of research, they proposed the time window projection onto convex set (POCS) technique to optimise the problems of the filters in the algorithm and verified the performance of the technique through simulation and experiment. 14 Wu et al. improved the FxLMS algorithm and proposed an active noise control method based on the combination of the Nesterov accelerated adaptive moment estimation (NADAM) optimisation algorithm and the FULMS algorithm. Simulation experiments have proved that the algorithm can both improve the degree of noise reduction and the convergence speed. 15 The research conducted by the scholars mentioned above indicates a scarcity of investigations within this field. Also, the frequency component of noise that can be reduced is in the range of 200–500 Hz, and a lack of research is observed that can give good performance for reducing noise below the 200 Hz. Considering that the adaptive notch algorithm has excellent noise reduction performance for single-frequency low-frequency noise. Meanwhile, the adaptive notch filtering algorithm has been applied to the field of active noise control of automobile engines in recent years, considering that the noise generation mechanism of refrigerator compressor is similar to that of automobile engines. Therefore, the active noise control algorithm used in this paper is improved under the adaptive notch filtering algorithm.
Sun used the adaptive notch filtering algorithm to control the engine noise in the cabin of a car and achieved the noise reduction in the range of 9.4 dB–15.1 dB. 16 Chen proposed the adaptive delayed notch filtering algorithm to reduce the computational cost based on the adaptive notch filtering algorithm, and the simulation comparison proved that the computational cost was reduced, and the total noise reduction in the frequency range of 20–200 Hz for practical experiments reaches 7.4 dBA. 17 Wang et al. proposed a parallel adaptive notch filtering algorithm, compared the algorithm with the triangular cascade algorithm, proved the superiority of the algorithm in terms of simulation, and proved the feasibility of the algorithm by practical experiments. 18 Gao et al. used the traditional adaptive notch filtering algorithm to build an active noise control system for a brand of automobile to control the order noise of the engine and realised the noise control of automobile engine. 19 He et al. improved the traditional adaptive notch filtering algorithm and built an actual active noise control system through a DSP chip to realise the noise control of the engine. 20 After a year of research, they optimised the performance of the previously proposed algorithm, compared it with the previous algorithm through simulation experiments to prove the superiority of the new algorithm, and built an active noise control system with a DSP chip as the core to control the engine noise in the car in the real car, which proved the feasibility of the algorithm. 21 Lu et al. used a dual-channel adaptive delay notch algorithm to study the interior noise control and experimentally proved that the proposed algorithm outperforms the pre-improvement algorithm in terms of computation and noise reduction performance. 22 Lu et al. apply the algorithm to control the noise pollution in the cockpit of hydraulic excavator and improve the system efficiency by replacing the convolutional calculation with indexing delay on the basis of adaptive notch filtering algorithm. At the same time, considering that the error signal acquisition will introduce external interference signals, the introduction of adaptive notch filter to enhance the stability of the system, the simulation, and experiment proved the superiority of the algorithm. 23 Sun et al. proposed a hybrid active noise control system for excavator noise, which uses an algorithm combining adaptive delayed notch filtering and adaptive notch filtering and also introduces a feedback algorithm to eliminate impulse noise. The hybrid system is experimentally proved to be able to effectively reduce both broadband and narrowband noise. 24 Zhang et al. proposed a multi-channel adaptive delayed notch filtering algorithm, which achieved an overall noise reduction of 4.05 dB (A) and the second-order noise reduction of 13.66 dB (A) under smooth vehicle conditions. 25 Based on the above analysis, the adaptive notch filtering algorithm achieves remarkable results in automotive engine noise reduction, exhibiting its potential in reducing single-frequency noise below 200 Hz. Therefore, it is introduced into the noise control of refrigerator compressor. However, using the adaptive notch filtering algorithm alone to control the noise of the refrigerator compressor, due to the limited space and complex structure of the refrigerator compressor compartment, it will introduce external interference signals during the collection of the error signal and thus reduce the noise reduction performance of the algorithm. Thus, this paper proposes the cascade notch feedback algorithm. The cascade notch feedback algorithm is divided into the adaptive cascade notch algorithm and the feedback algorithm. The adaptive cascade notch algorithm is used to process the main frequency noise and the harmonic noise by cascading two adaptive notch filtering algorithms, which ensures the algorithm’s ability to reduce noise at the main frequency and the harmonic noise. On the other hand, the feedback algorithm is constructed with a robust algorithm at its core, which is used to reduce the impact of external interference signals on the noise reduction capability of the algorithm. The following sections of this paper are arranged as follows: Firstly, the structure of adaptive notch filtering algorithm and its improvement algorithms are reviewed; then the cascade notch feedback algorithm is introduced; in order to show the performance of the algorithm, the algorithm is evaluated by simulation experiments on the actual noise signal of refrigerator compressor; when the evaluation of the algorithm is completed by simulation experiments, the actual feasibility of the algorithm needs to be evaluated by actual experiments on the noise reduction of the refrigerator noise; finally the cascade notch feedback algorithm is Finally, the cascaded notch feedback algorithm is concluded and prospected.
The cascaded notch feedback algorithm
The traditional active noise control algorithm is built based on the FXLMS algorithm, and the block diagram of the FxLMS algorithm is shown in Figure 1. In the block diagram, Block diagram of the FxLMS algorithm.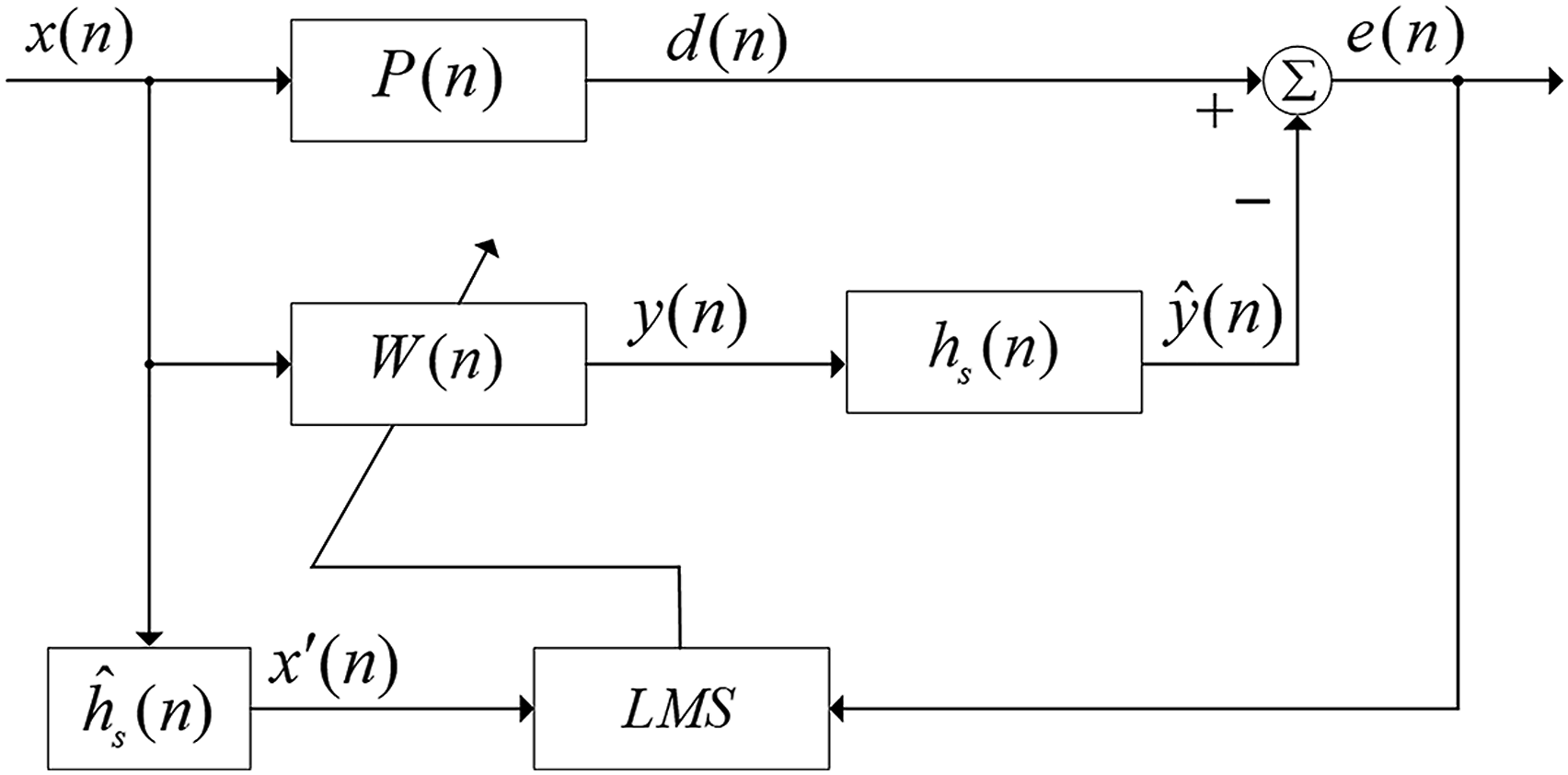
The block diagram of the adaptive notch filtering algorithm is shown in Figure 2. Compared with the FxLMS algorithm, the algorithm is optimised in terms of reference signal acquisition, using non-acoustic sensors (e.g. accelerometers) to acquire and analyse the reference signal to obtain the signal’s amplitude-frequency information, reconstruct the reference signal, and participate in the active noise control algorithm. This avoids the introduction of external interference signals in the construction of the reference signal. Block diagram of the adaptive notch filtering algorithm.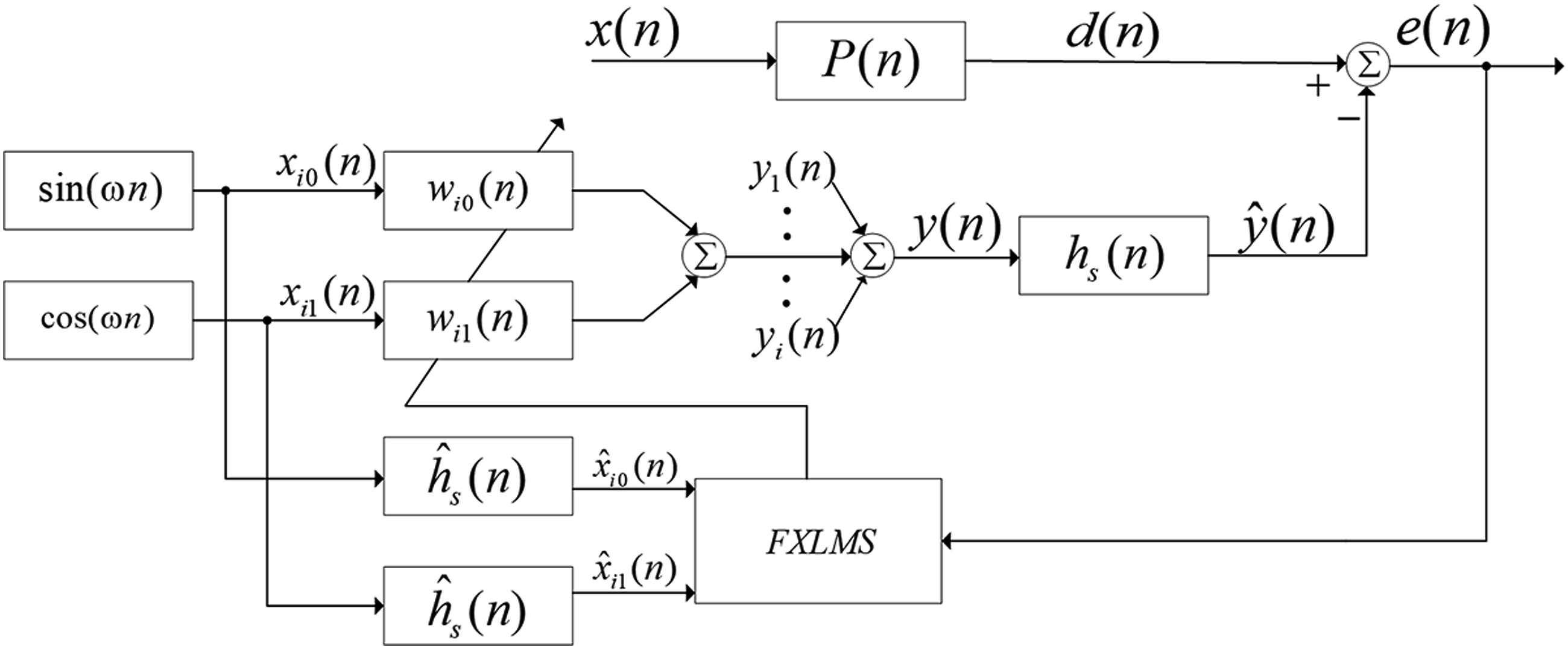
Both the FxLMS algorithm and the adaptive notch filtering algorithm do not consider the introduction of external interfering signals at the error signal, so in practical applications, both algorithms are susceptible to the interference of external signals at the error signal affecting the noise reduction performance of the algorithms. Therefore, adaptive notch filtering algorithm combined with passband interference cancellation for reducing the impact of external interference signals is proposed, which mainly consists of the following structures.
Adaptive notch filtering algorithm combined with passband interference cancellation
The structure of the algorithm in Figure 3 is proposed by Lu et al. to solve the noise problem in the excavator cab.
23
Based on the original adaptive notch filtering algorithm, another adaptive notch filter is introduced. This filter uses the same reference signal as the active noise control algorithm, and its function is to identify the target frequency in the error signal and filter out the uncorrelated signals in the error signal. However, the noise reduction performance of the algorithm can still be greatly affected if the types of external interference signals are complex. Therefore, after a period of research, hybrid algorithm based on adaptive notch filtering has been proposed. Block diagram of adaptive notch filtering algorithm combined with passband interference cancellation.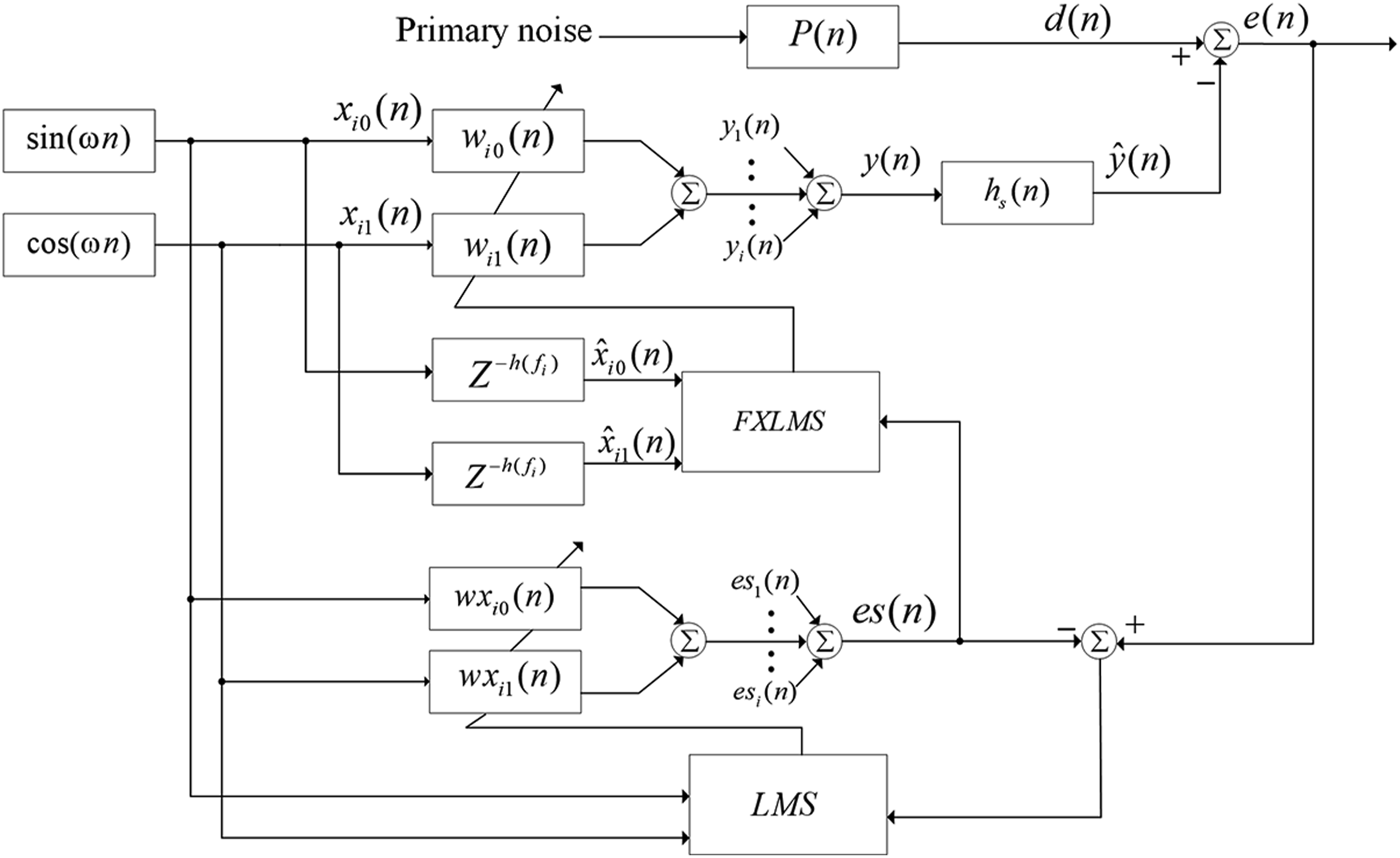
Hybrid algorithm based on adaptive notch filtering algorithm
The block diagram of the hybrid algorithm based on the adaptive notch filtering algorithm is shown in Figure 4. In contrast to the algorithm in Figure 3, the algorithm processes the noise signal accordingly for the main frequency noise, the external interference signal. The algorithm is mainly divided into three modules: the first module adopts the adaptive delayed notch filtering algorithm to deal with the main frequency noise in the noise signal. The second module is the calibration module adopts the adaptive notch filter structure to calibrate for the first module while providing the primary noise for the third module. The third module is used to deal with external interference signals. The algorithm can well solve the problem of external interference signals affecting the noise reduction performance. However, for the algorithm structure of Figures 3 and 4, when dealing with the main frequency noise, the adaptive notch filter of the main frequency noise signal is added, which is acceptable in terms of computational cost. However, if the main frequency noise and harmonic frequency noise have to be processed at the same time, the adaptive notch filter related to the harmonic frequency noise needs to be added, and the calculation cost is larger. So this paper proposes the cascade notch feedback algorithm. Block diagram of hybrid algorithm based on adaptive notch filtering algorithm.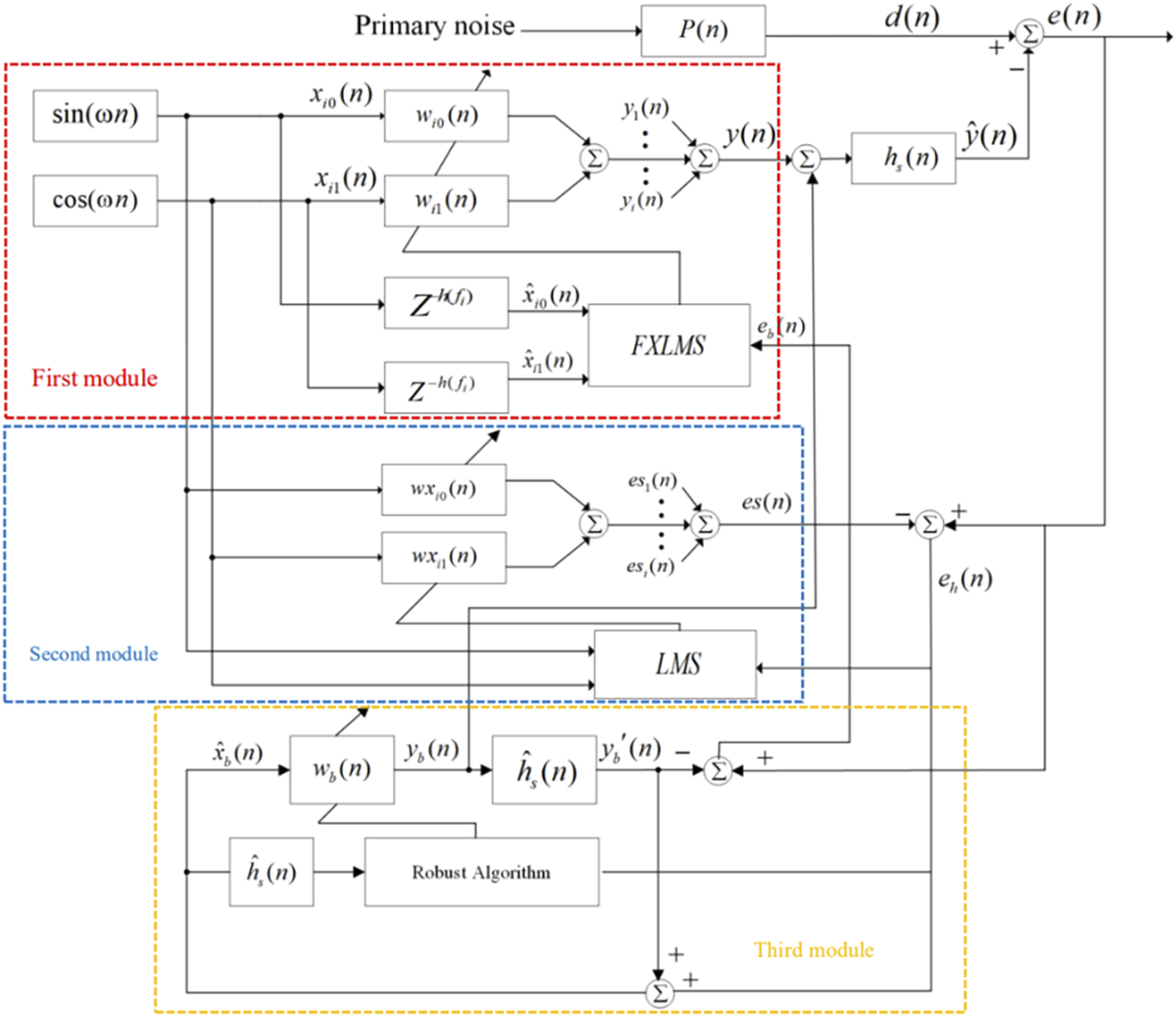
The cascade notch feedback algorithm
The block diagram of the cascade notch algorithm is shown in Figure 5, which consists of two modules, the first module is the cascade notch algorithm, which is used to process main frequency noise and the harmonic frequency noise in the noise signal. The second module is the feedback module, which is used to processing the external interference signal. The cascading notch algorithm of the first module is formed by cascading a plurality of the algorithmic structures of Figure 2. The algorithm is depicted as an example of the main frequency noise signal and the harmonic frequency noise signal. Firstly, the noise is collected using an accelerometer, and then spectral analysis is carried out to analyse the frequency and amplitude of the highest and second highest peak of the noise signal, which are defined as the main frequency noise and the harmonic frequency noise, respectively. The reconstruction of the reference signal is carried out by means of a sine-cosine signal, Block diagram of the cascade notch feedback algorithm.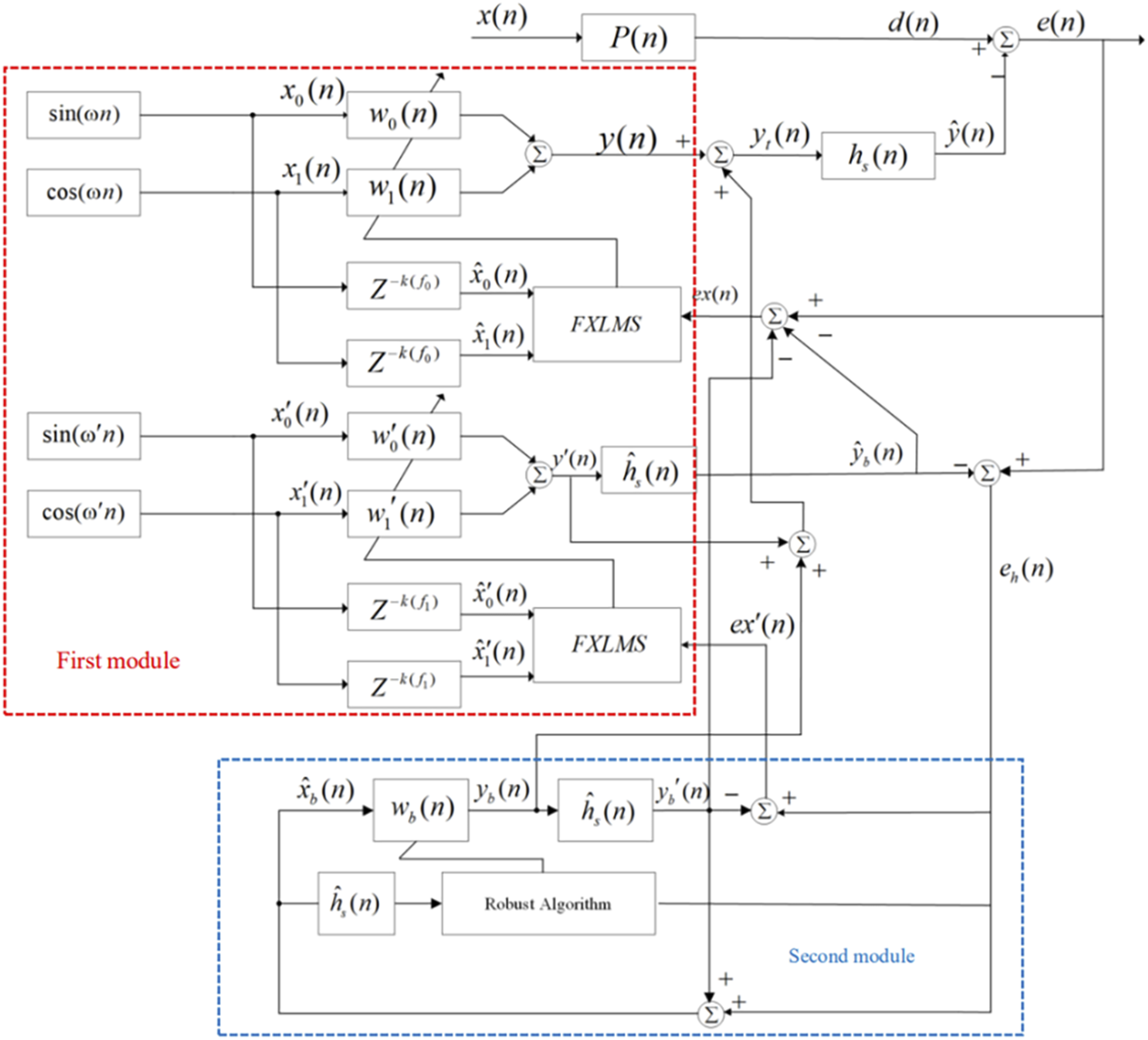

At this point, this output signal passes directly through the secondary path generates the secondary noise signal. Assuming the presence of an external disturbance signal as

The error signal contains the signal after cancellation of the original noise signal with the signal generated by the active noise control algorithm at the main frequency noise frequency, the harmonic frequency noise signal, and the external interference signal. If this error signal is directly involved in the updating of the coefficients of the algorithm, it will lead to the decrease of the algorithm’s noise reduction performance due to the presence of harmonic frequency noise signals and external interference signals. The harmonic frequency noise signal, which affects the noise reduction performance of the algorithm, is solved by the cascade notch filtering algorithm of the first module. The error signal is transmitted to the adaptive notch filtering algorithm constructed from the harmonic frequency noise reference signal to participate in the algorithm operation as primary noise. The output signal generated from the harmonic frequency noise reference signal is

This signal generates secondary noise of harmonic frequency noise

The error signal at this time contains the signal of the main frequency noise in the original noise signal cancelled by the active noise control algorithm, the signal of the harmonic frequency noise cancelled by the active noise control algorithm, and the external interference signal. For the remaining external interference signals, the feedback algorithm of the second module needs to be processed.
The feedback algorithm of the second module uses

The module uses a FIR filter structure with an adaptive robust algorithm at its core, and the reference signal passes through this structure to obtain the output signal



Cost functions and equivalent formulas for different robust algorithms.

After the update of the parameters of the feedback algorithm of the second module is completed, the parameters of the adaptive notch filtering algorithm for main frequency noise and harmonic frequency noise in the first module need to be updated. Harmonic frequency noise adaptive notch filtering algorithm parameter update needs to use the error signal 




At this time, the adaptive delayed notch filtering algorithm for harmonic frequency noise in the first module completes the updating of the coefficients.
The remaining is the algorithm coefficient update of the main frequency noise. The error signal 
Therefore, the formula for updating the filter taps of the mains frequency noise adaptive delayed notch filtering algorithm is shown below.



When the updating of the coefficients of the algorithm is completed, the respective generated output signals are superimposed to obtain the total output signal containing the primary frequency noise, harmonic frequency noise, and external interference signal.
Comparison of simulation experiments
Reference signal construction
Before performing the simulation experiments, some parameters required for the algorithm need to be collected. Considering that the cascade notch feedback algorithm includes the adaptive delay notch filtering algorithm, the reference signal and secondary path estimation are configured. Firstly, the reference signal is configured by measuring the noise signal using an accelerometer instead of a microphone. It can avoid the introduction of external interference signals during the reference signal acquisition process and ensure the accuracy of the reference signal construction. In order to ensure the feasibility of the replacement, a microphone and an accelerometer were used to collect the noise signals separately. The spectral analysis diagrams after signal acquisition are shown in Figure 6. Spectrum of noise signal (microphone collection on the left and accelerometer collection on the right).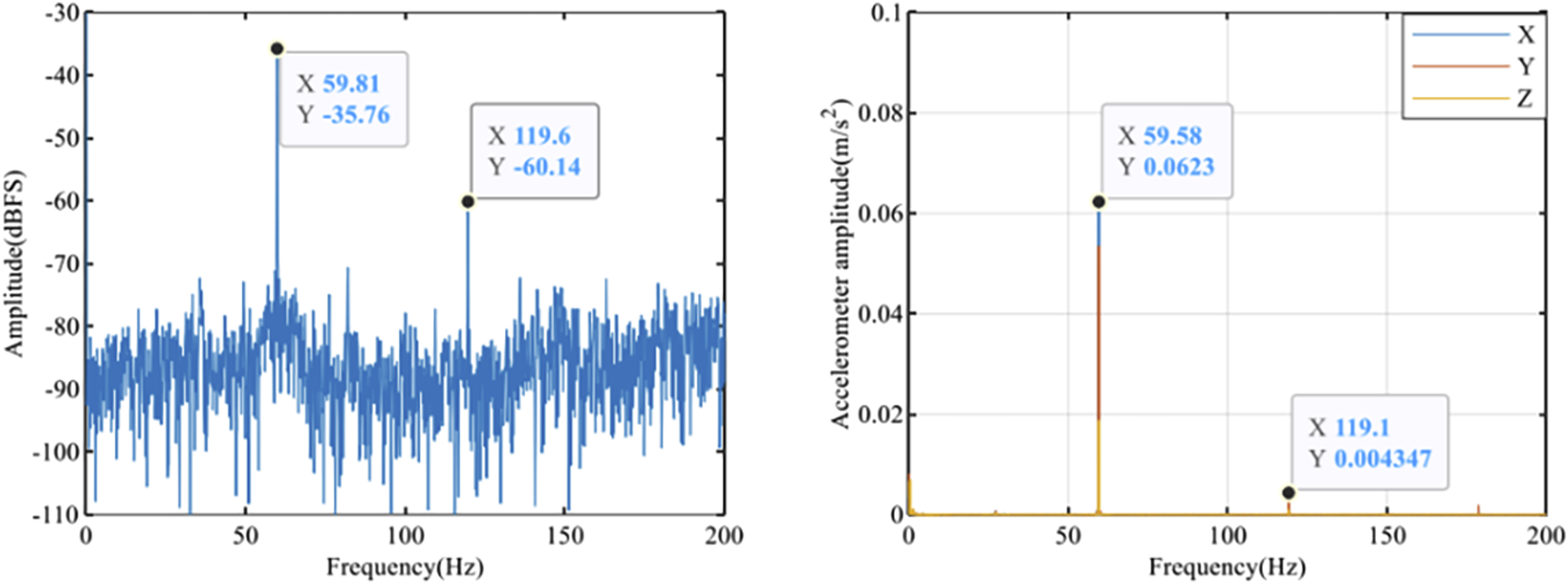
The left side of Figure 6 shows the noise of the refrigerator compressor collected by the microphone, and the frequency of the measured main frequency noise is 59.81 Hz, and the harmonic frequency noise is 119.6 Hz. The right side of Figure 6 shows the noise of the refrigerator compressor collected by the accelerometer, and the frequency of the measured main frequency noise is 59.58 Hz, and the harmonic frequency noise is 119.1 Hz. The measured noise of the refrigerator is all low-frequency noise. Through the comparison of the above figures, the main frequency noise and harmonic frequency noise of the refrigerator compressor collected by the microphone and the accelerometer are approximately the same, which proves the feasibility of the accelerometer replacing the microphone to collect the noise signal and then construct the reference signal. The X, Y, and Z axis data collected by the accelerometer in Figure 6 were processed to construct a reference signal with an amplitude of 0.1 at the main frequency noise and 0.005 at the harmonic frequency noise. The constructed reference signal 
Collection of secondary path estimation
After the reference signal has been constructed, the secondary path estimation of the active noise control needs to be measured. In order to obtain an accurate secondary path estimation, the filter order for storing the secondary path estimation is set to 300, the step size is set to 0.00001, the sampling frequency is set to 4 KHz, and the actual secondary path estimation modelling is carried out, and the identification model of the secondary path is shown in Figure 7. Secondary path estimation identification model.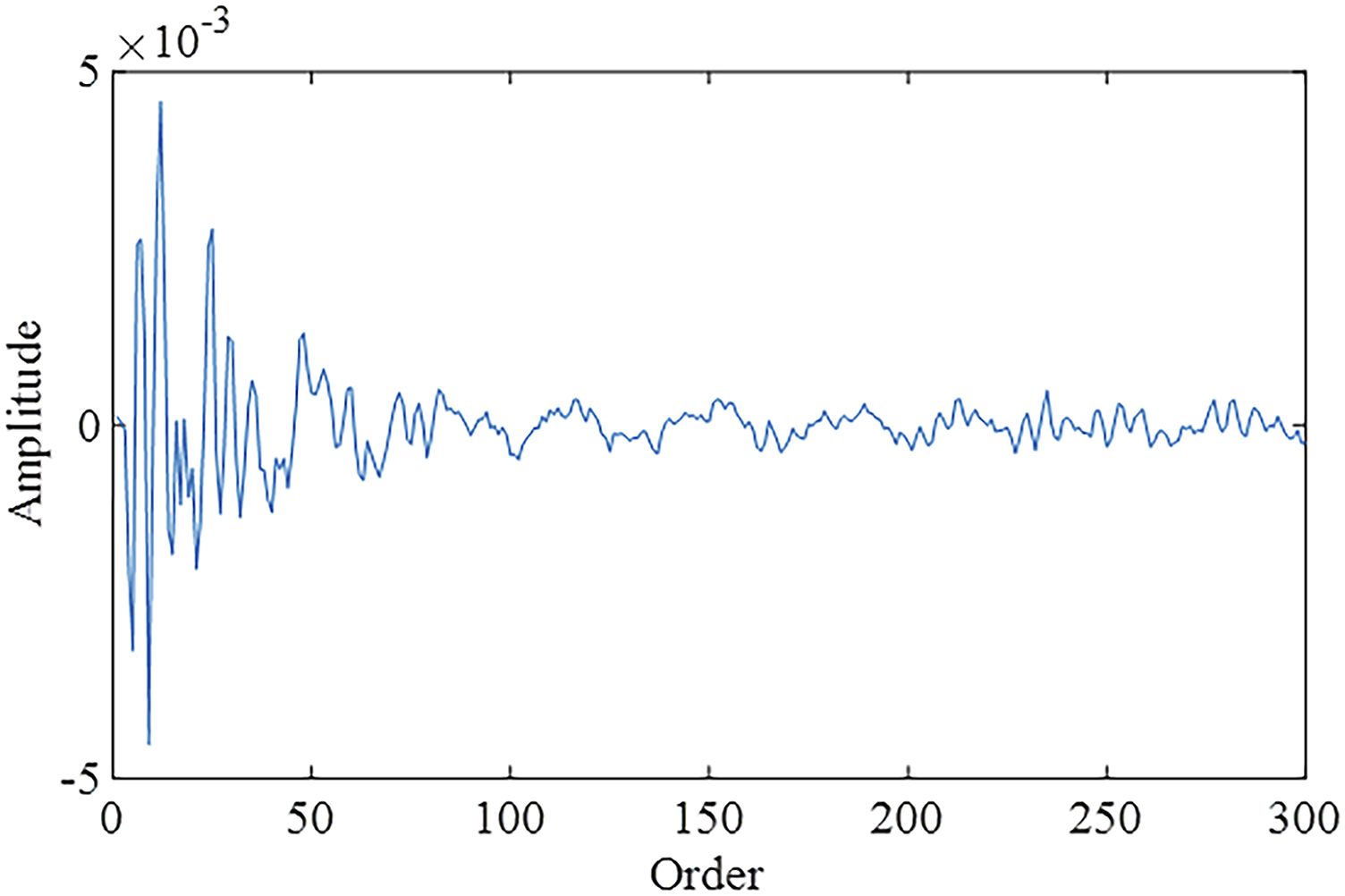
Comparison of actual refrigerator compressor noise signal simulation experiments
After the construction of the reference signal and secondary path estimation, simulation experiments are built to test the performance of the cascaded notch feedback algorithm. In terms of noise signal selection, the actual measured noise of the refrigerator compressor is used, and the spectrum analysis diagram of the acquired noise signal is shown in Figure 8. The signal was selected for the experiment for the following reasons: (1) The signal contains the noise generated by the vibration of the refrigerator compressor, which is 59.78 Hz for the main frequency noise and 119.6 Hz for the harmonic frequency noise. (2) Because the refrigerator is used in life, it is inevitable that external interference signals will be introduced from the error signal, and in order to simulate such a situation, the signal is introduced in the process of acquiring the open door sound, mouse click sound and talking sound, and other simulated external interference signals, so in the spectrum analysis, there will be a higher amplitude at different with the main frequency noise and harmonic noise at the frequency. The cascade notch feedback algorithm (using the three robust algorithms in Table 1) is compared with the adaptive notch filtering algorithm, the adaptive notch filtering algorithm combined with passband interference cancellation, and the hybrid algorithm based on the adaptive notch filtering algorithm
24
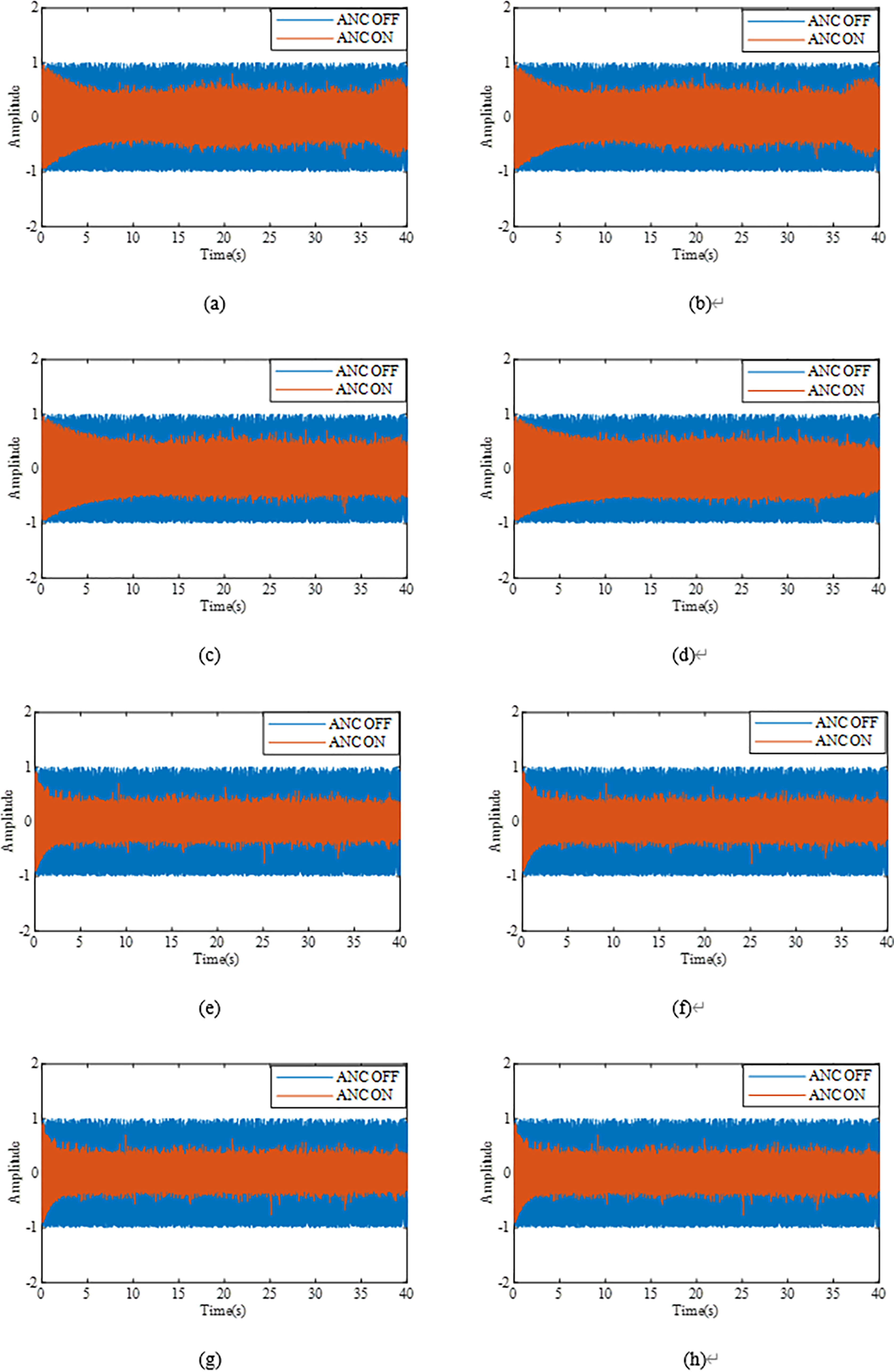
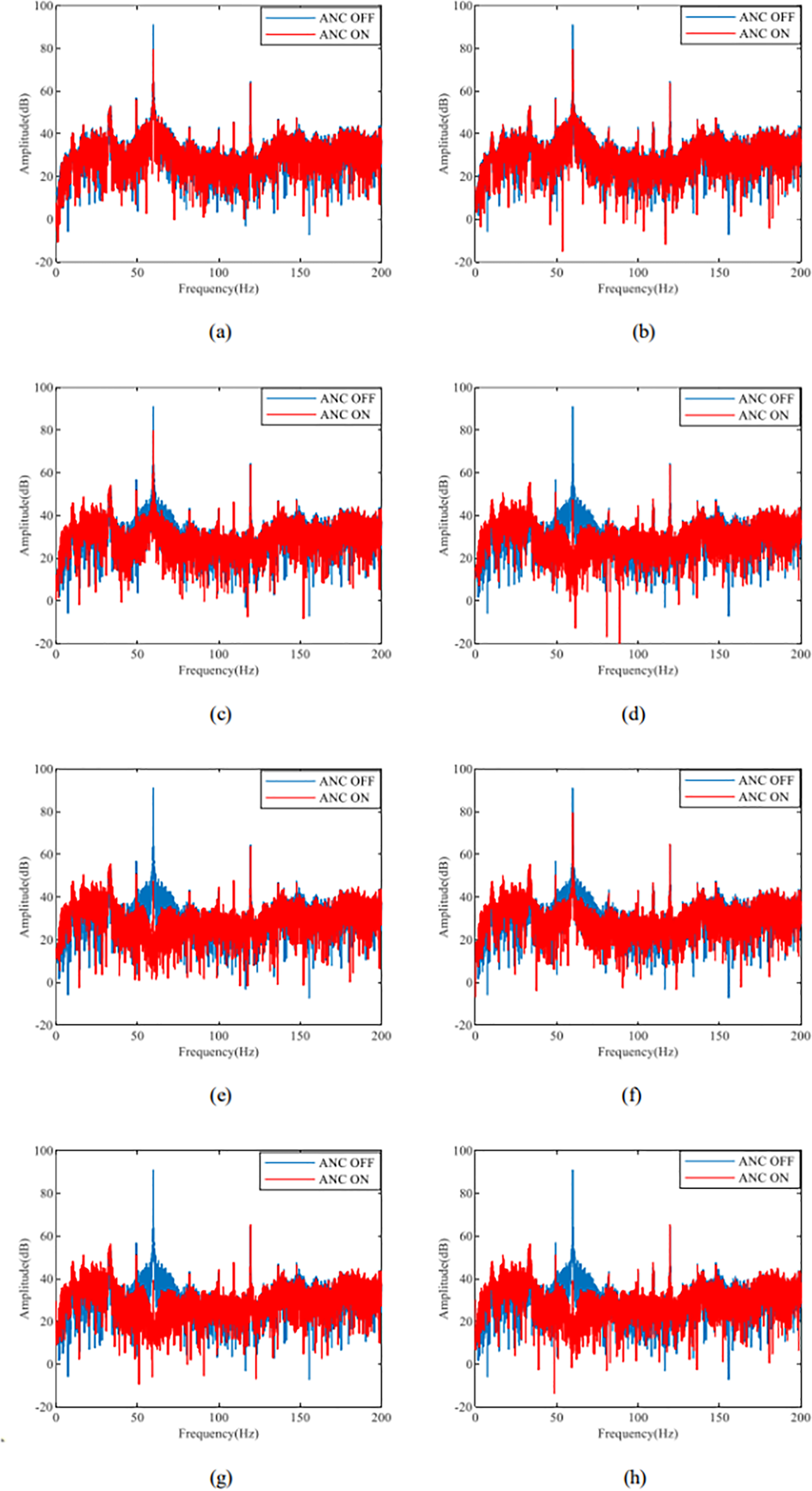
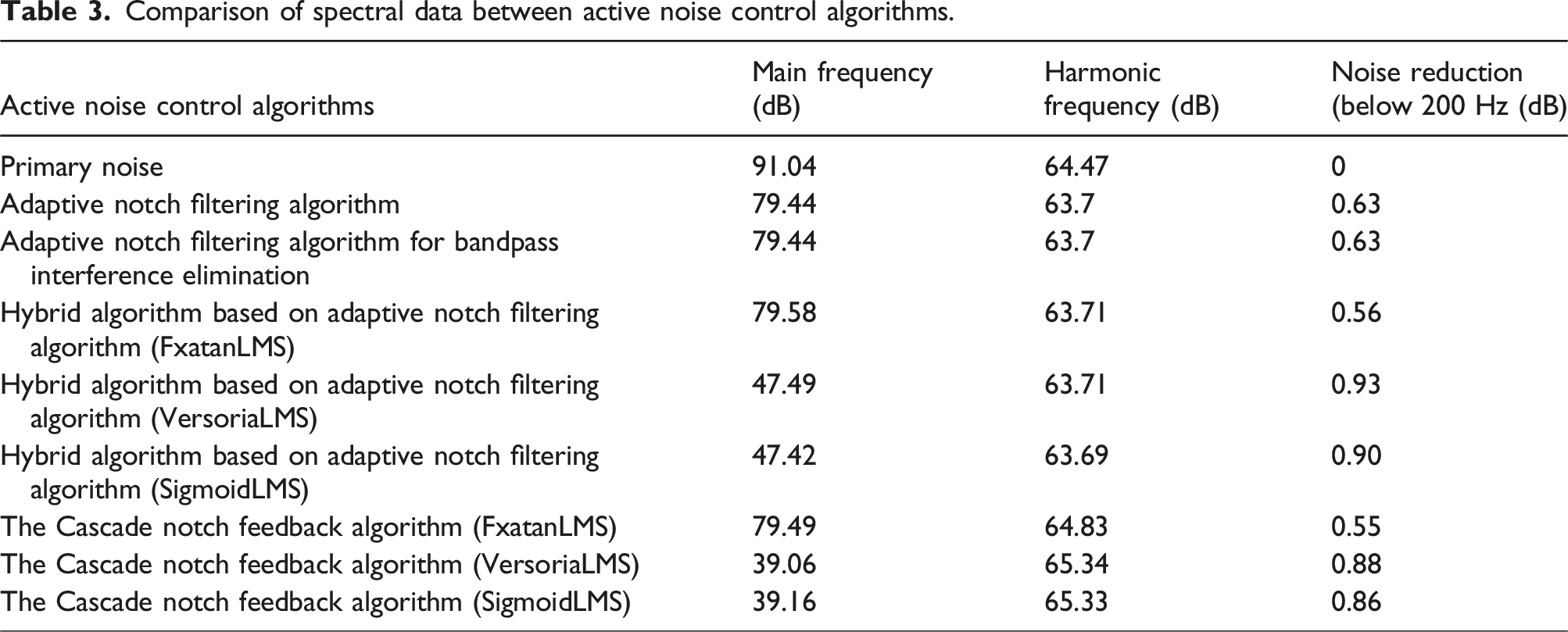
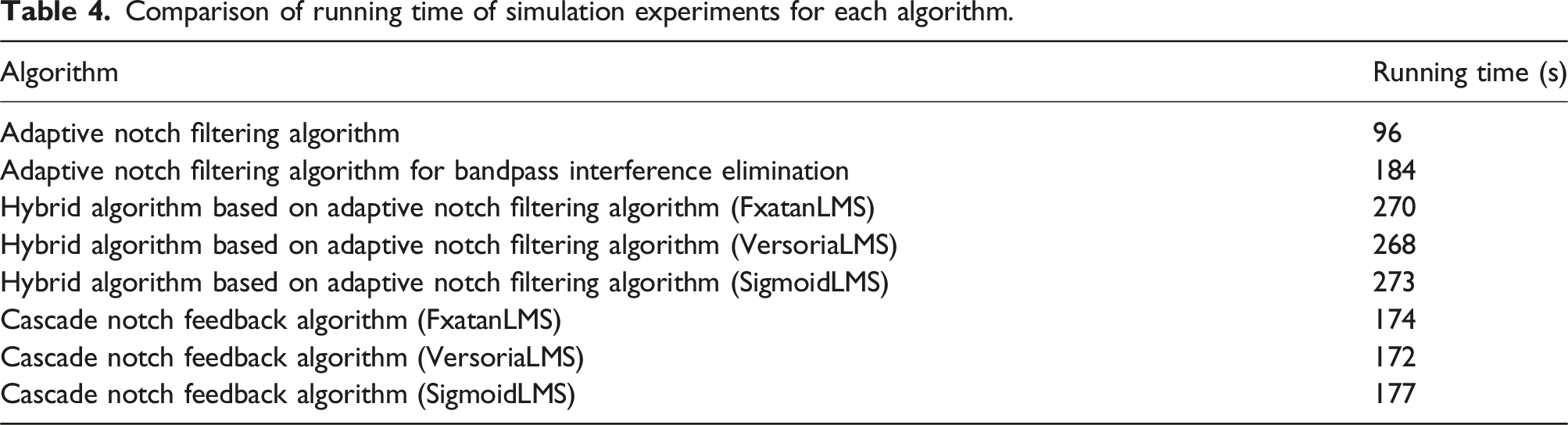
(using the three robust algorithms in Table 1) in the simulation experiments. In the active noise control simulation experiment, the secondary path estimation and the reference signal constructed above are introduced into the simulation experiment. The actual secondary path required in the simulation experiment is set to be the same as the secondary path estimation. The filter order is set to 300, and the sampling frequency is set to 4000. The optimal parameters of each algorithm used for simulation experiments are shown in Table 2. The time domain diagrams before and after the active noise control algorithm are shown in Figure 9 in the order of the algorithms in Table 2. By comparing the above figures, we find that all the algorithms in Table 2 have noise reduction effect on refrigerator noise. However, the adaptive notch filtering algorithm and adaptive notch filtering algorithm for bandpass interference cancellation gradually reduce the amount of noise reduction after the noise reduction effect has been stable for some time. It indicates that these two algorithms are less resistant to external interference signals, and the noise reduction of the algorithms is susceptible to the influence of external interference signals. As for the hybrid algorithm of adaptive notch filtering and the cascade notch feedback algorithm proposed in this paper, the noise reduction effect remains unchanged after the algorithm is stabilised, so it is more resistant to external interference signals. In order to further analyse the noise reduction performance of these active noise control algorithms, the signals before and after the control of these algorithms are analysed in the frequency domain and the results obtained are shown in Figure 9. The spectral analysis of the signal in Figure 10 corresponds to the time domain analysis of the signal in Figure 9. In order to be able to observe the spectral data more intuitively, the main parameters of the spectral analysis of the signal after noise reduction of each algorithm are included in Table 3. The completion time of each algorithm to process the noise signal of the refrigerator compressor was recorded to evaluate the computational amount of each algorithm while the noise reduction signal was analysed spectrally, and the specific data are shown in Table 4. By comparing the above data, it is easy to find that, compared with the adaptive notch filtering algorithm and its improved algorithm, the cascade notch feedback algorithm proposed in this paper has better noise reduction effect at the main frequency noise and worse noise reduction effect at the harmonic frequency noise. In terms of the overall amount of noise reduction below 200 Hz, the cascade notch feedback algorithm has approximately the same noise reduction effect as the hybrid algorithm based on adaptive notch filtering algorithm, which has the best noise reduction effect. In terms of the computational cost of the algorithm, analysing Table 4 and Figures 2–5, it can be seen that the structure of the adaptive notch filtering algorithm is relatively simple, and there is no corresponding module added to resist external interference, so the algorithm is less computationally intensive. However, by observing Figure 9(a), it can be seen that the algorithm is easily affected by external interference signals and the noise reduction performance is unstable. Adaptive notch filtering algorithm for bandpass interference cancellation removes the effect of external interference signals on the algorithm by adding additional adaptive notch filters, but for refrigerator compressor noise, more adaptive notch filters need to be added to better reduce the main frequency noise and the harmonised frequency noise, so its computational cost increases significantly, while observation of Figure 9(b) shows that the algorithm is not stable in terms of noise reduction performance is also not stable enough. The hybrid algorithm based on the adaptive notch filtering algorithm introduces a feedback algorithm to remove external interference on the basis of adaptive notch filtering algorithm for bandpass interference cancellation, so the algorithm takes the longest time, has the largest amount of computation, and is more stable in terms of noise reduction performance. The cascade notch feedback algorithm proposed in this paper greatly optimises the computation amount under the premise of ensuring the noise reduction performance. Therefore, the cascade notch feedback algorithm has simulation feasibility. Spectral analysis of refrigerator compressor noise signal. Selection of parameters for each algorithm. Comparison of noise signals before and after simulation experiments of different active noise control algorithms. Comparison of spectral analysis before and after simulation experiments of different active noise control algorithms. Comparison of spectral data between active noise control algorithms. Comparison of running time of simulation experiments for each algorithm.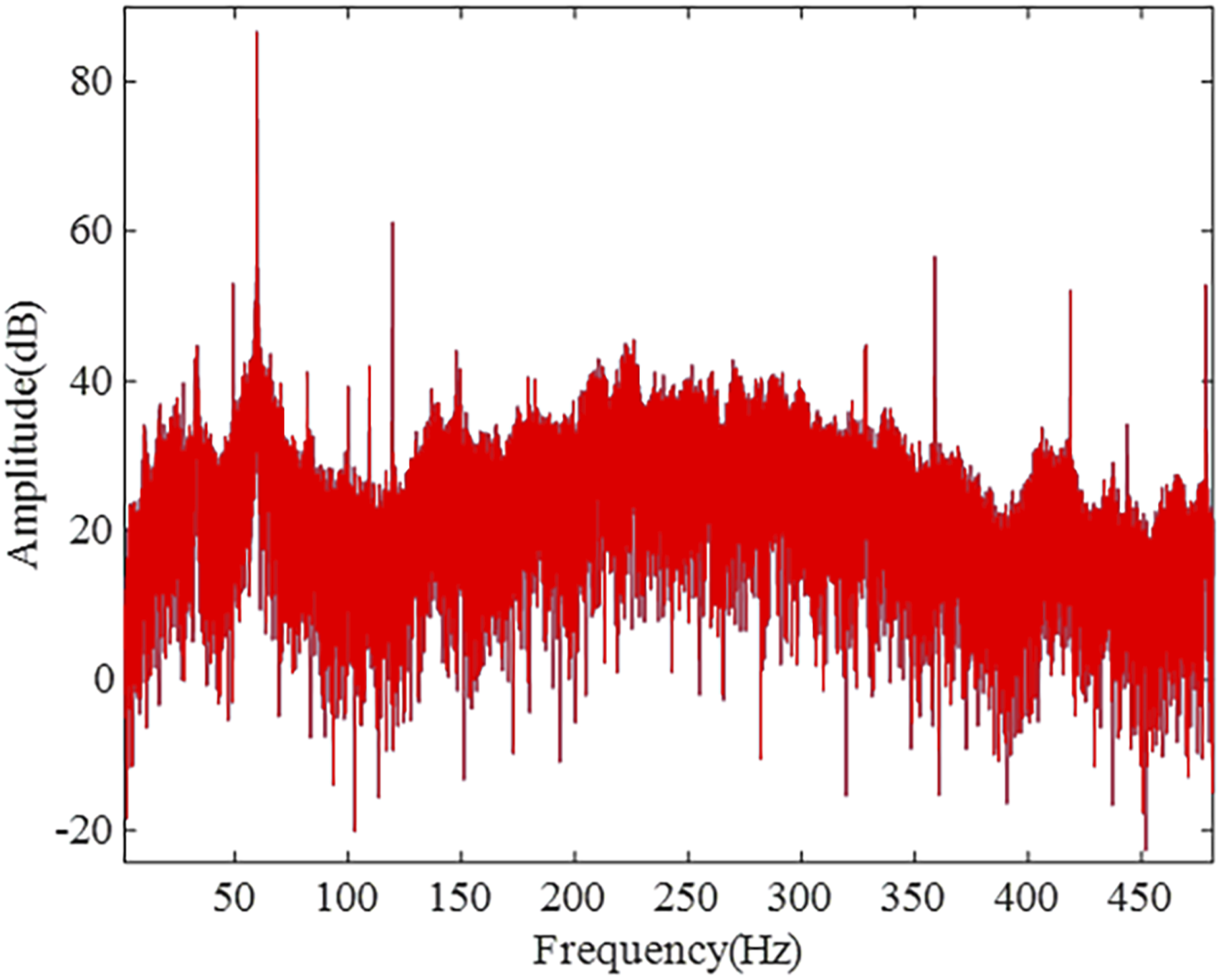
Refrigerator compressor actual noise reduction experiment
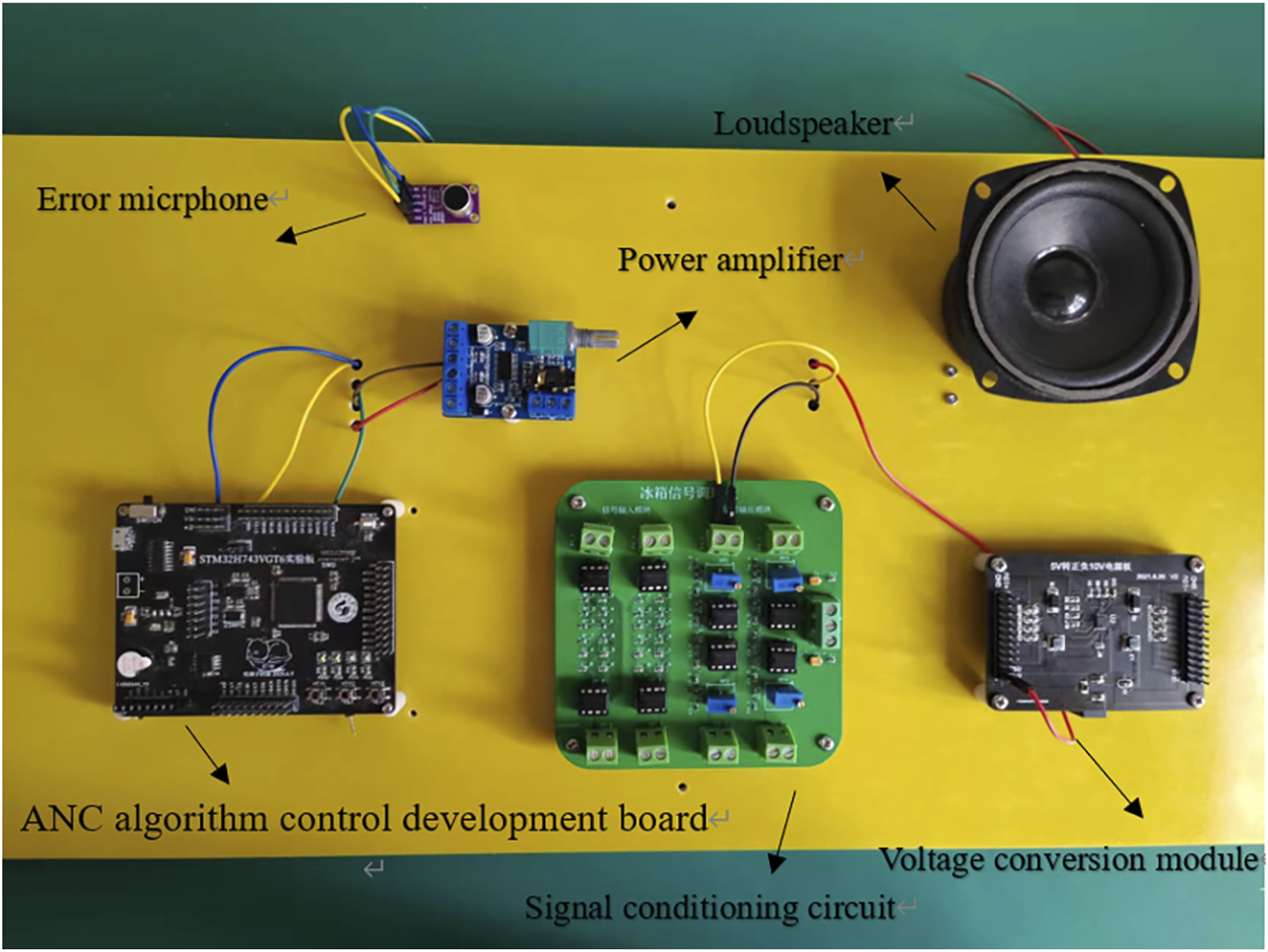
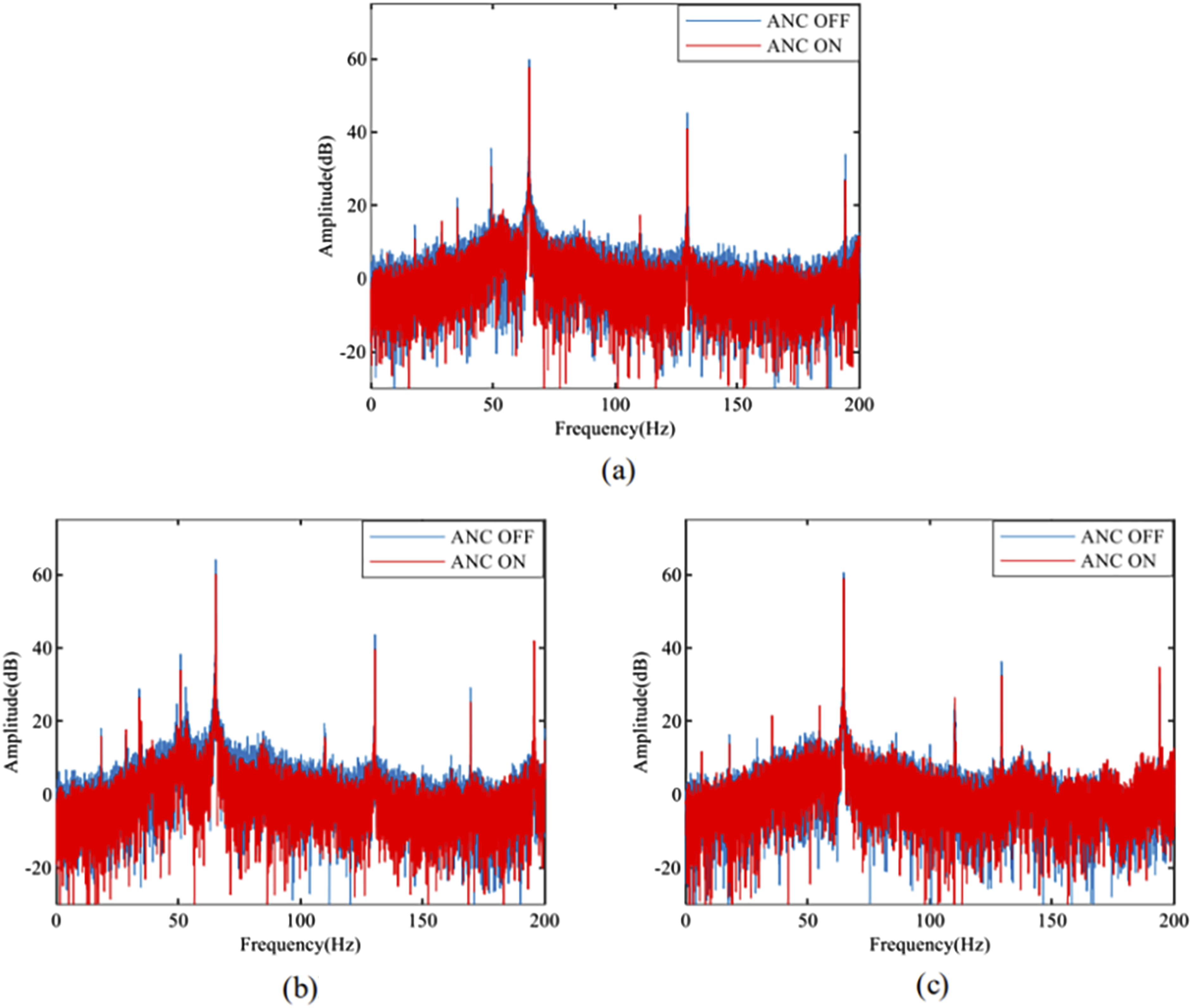
After completing the simulation experiment, the active noise control system is built with the cascade notch feedback algorithm as the core. The block diagram of the active noise control system is shown in Figure 11. The refrigerator compressor noise signal is acquired by an accelerometer noise signal collection circuit. In this paper, STM32H743VGT is used to construct the active noise control algorithm control circuit to improve the cost-effectiveness. In order to construct the primary noise signal more accurately, the noise generated by the refrigerator compressor was measured by fixing the accelerometer to the compressor. The placement of the accelerometer and the STM32H743 development board in the actual refrigerator compressor room structure when tested alone is shown in Figure 12. Considering the limited size of the refrigerator compressor room and the need to simulate the noise conditions generated by the normal operation of the refrigerator compressor, the components of the active noise control system are placed on the baffle plate for the test. The required components of the active noise control system for the refrigerator compressor and their placement are shown in Figure 13. In Figure 13, the signal conditioning circuit integrates the input signal conditioning circuit and the output signal conditioning circuit of the structure of Figure 11. The accelerometer is then fixed in the same position as in Figure 12, and the experiment can be carried out by connecting it to the development board. The noise reduction experiment of the refrigerator compressor can be carried out by placing the loudspeaker and error microphone on the inside of the baffle and the rest of the components on the outside of the baffle to close off the refrigerator compressor room. The secondary path estimation is determined by Figure 7 and can be used directly in active noise control experiments. Once the secondary path estimation has been determined, running the refrigerator makes it operate properly and generate noise. The algorithm parameters are adjusted taking into account the effects of hardware devices and other factors. The coefficients of the robust algorithm in the feedback algorithm are kept unchanged, and the sampling frequency is set to 4 KHz to be consistent with that of the secondary path identification, and the algorithmic step size is uniformly set to 0.0005 to ensure that the algorithm converge. When the cascade notch algorithm is running stably, the refrigerator noise before and after the active noise control system is turned on and is analysed at a distance of about 0.5 m from the refrigerator; the results are shown in Figure 14. Specific values are shown in Table 5. The black values in Table 5 represent the data before controlling by the active noise control algorithm and the red values represent the data after controlling by the active noise control algorithm. Therefore, the cascaded notch feedback algorithm can be effective for noise reduction in real active noise control systems, and the noise reduction effect is optimal when the robust algorithm is VersoriaLMS, and the algorithm has practical feasibility. Refrigerator compressor active noise control system framework. Accelerometer and STM32H743 development board in an actual refrigerator compressor chamber. Refrigerator compressor active noise control system components and placement. Before and after comparison of cascaded notch feedback algorithm with different robust algorithms to deal with refrigerator noise. (a) Robust algorithm: VersoriaLMS, (b) robust algorithm: FxatanLMS, and (c) robust algorithm: SimgoidLMS. Comparison of spectral data of the cascaded notch feedback algorithm with different robust algorithms.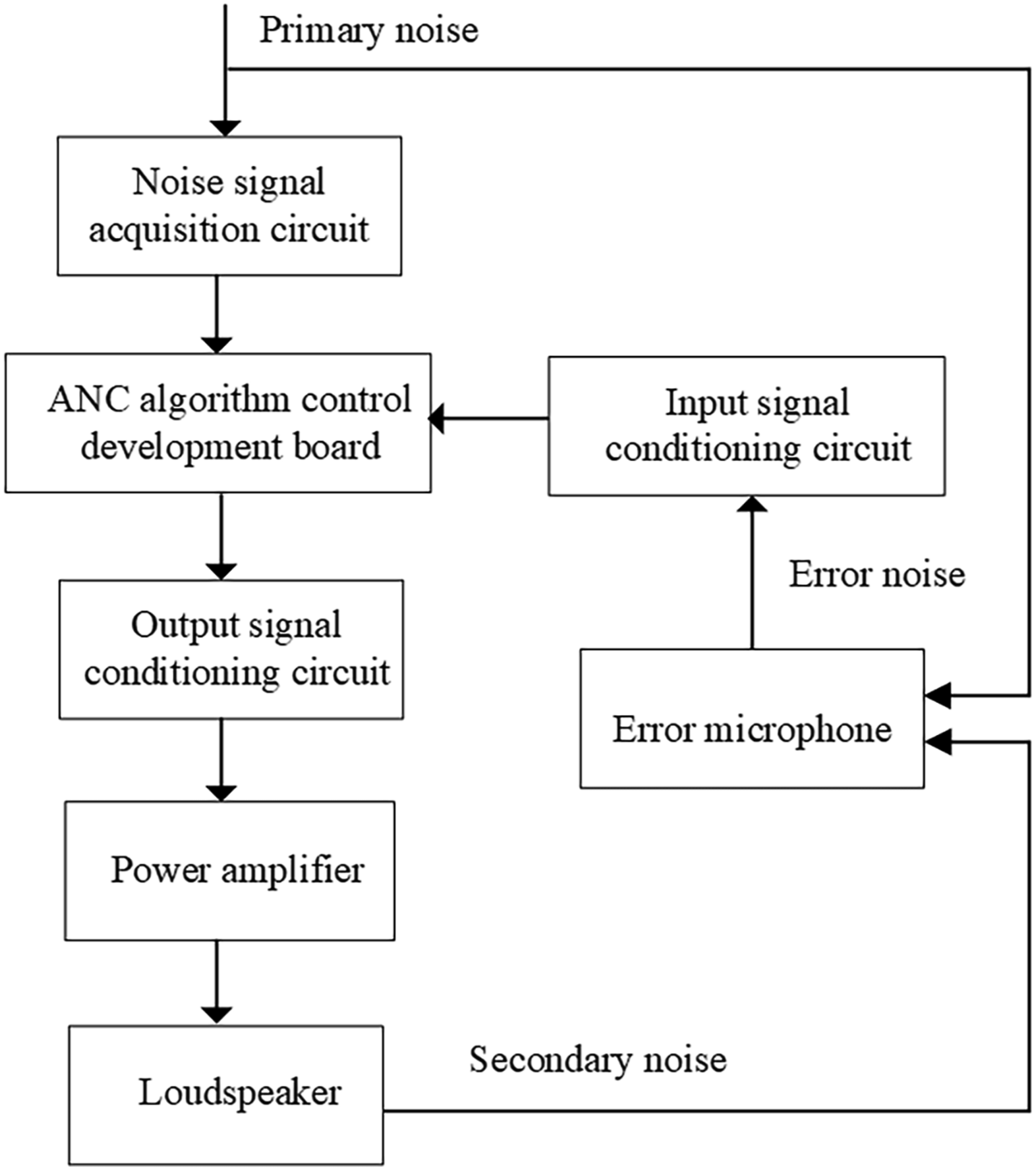


Conclusions and prospects
According to the performance of adaptive notch filtering algorithm to reduce single-frequency noise and robust algorithm to reduce external interference noise, this paper proposes the cascaded notch feedback algorithm to reduce refrigerator compressor noise. The algorithm can effectively reduce the main and harmonic frequency noise of the refrigerator compressor and resist external interference signals. Comparison with the adaptive notch filtering algorithm and its improved algorithms through simulation experiments greatly saves the computational cost while ensuring the noise reduction performance. The actual active noise control systems constructed with cascaded notch feedback algorithms with different robust algorithms have noise reduction effects on refrigerator noise reduction, which proves the practical feasibility of the algorithm. The active noise control algorithms proposed by previous scholars for noise reduction of refrigerator compressors are mainly better for the noise in the frequency band of 200 Hz–400 Hz, and less effective for the noise in the frequency band below 200 Hz. The cascaded notch feedback algorithm proposed in this paper reduces the noise of the refrigerator compressor at 59.8 Hz and 119.6 Hz very well and provides a new idea for the subsequent research on the active noise control of the refrigerator compressor in the noise control below 200 Hz.
In this paper, accelerometers and STM32H743VGT6 development board are used for active noise control experiments, and fractal MEMS systems will be considered in the subsequent research for better integration and better noise reduction effects.26–28 Due to the limited space size in the compressor room of a common refrigerator, how to determine the placement of devices to build an active noise control system in the limited space? To achieve optimal noise reduction, evolutionary algorithms usually solve the problem of positional optimality, so the introduction of evolutionary algorithms can be considered in subsequent research. In addition, the refrigerator and the active noise control system need to work for a long time, so we can consider the introduction of fans and other devices to cool down the active noise control system and the refrigerator compressor.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and publication of this article: The authors gratefully acknowledge the financial support received from Shandong University of Science and Technology to conduct the research work presented in this article.