
Abstract
This paper addresses the challenge of fixed-time adaptive control for nonstrict-feedback nonlinear systems with input saturation and sensor faults. The difficulty arising from the non-smooth saturation nonlinearity is to overcome by employing a smooth non-affine function to estimate the saturation signal. For systems with unknown functions, radial basis function neural networks (RBFNN) are utilized to approximate these unknown nonlinearities. Using the backstepping technique, an adaptive fixed-time control (FxTC) strategy is developed based on the Lyapunov function method. This approach ensures that all signals within the closed-loop system remain bounded, and the system output tracks the desired signal to a bounded compact set within a fixed time. Moreover, the convergence time of the tracking error is independent of the system’s initial states. The proposed approach is validated using a pendulum system and one-link manipulator system as examples. Additionally, comparative results are presented in the simulation section to demonstrate the superiority of the proposed method.
Keywords
Introduction
In recent decades, there has been notable emphasis on addressing the difficulties presented by nonlinear systems, given that a majority of real-world systems exhibit nonlinear characteristics.1–4 The issue of adaptive control in nonlinear systems emerged as a meaningful area of study, offering the capability to adjust controller parameters online and enhance production efficiency. Notably, the utilization of adaptive control with backstepping has become a popular technique for addressing issues related to nonlinear systems.1,5 The backstepping method, a recursive strategy that combines Lyapunov function selection with controller design, has advanced in the field of backstepping approaches. This development has led to the investigation of adaptive control techniques based on backstepping in a variety of nonlinear systems.6,7 Initially, research on most nonlinear systems assumed prior knowledge of uncertain nonlinearities’ bounds or linear parameterization. However, practical engineering systems demand control protocols capable of handling unknown dynamics. Leveraging the remarkable function approximation capabilities of fuzzy logical systems (FLSs) or neural networks (NNs), these techniques have found widespread application in nonlinear system control.11–14 To date, significant progress has been made, yielding meaningful results based on NN or fuzzy approximation methodologies.8–10 For example, an adaptive control strategy for nonlinear systems with dead-zone nonlinearity and uncertain control directions based on neural networks has been reported. Another approach discussed an adaptive control strategy for nonlinear systems, using a combination of a disturbance observer and neural networks. Additionally, a backstepping method was employed to propose an adaptive control scheme for stochastic nonlinear systems, incorporating neural networks. Addressing stochastic nonlinear systems in a nonstrict-feedback structure with output constraints and unknown dead zones, researchers introduced an adaptive control problem. Furthermore, another study introduced an adaptive control strategy for nonlinear systems with dead zone nonlinearity, utilizing the command filtering method and fuzzy logic systems. Furthermore, a prescribed performance control method was explored for nontriangular structure nonlinear systems using an adaptive fuzzy approach. 15
As commonly acknowledged, prolonged operation of practical engineering systems inevitably leads to faults in certain components, potentially causing performance degradation and even system instability. 16 Notably, it is crucial to highlight that all the previously mentioned references rely on accurate output signal measurements, rendering these control strategies inapplicable when sensors experience faults. Sensor faults are a prevalent issue in practical industrial systems. 17 Consequently, it becomes imperative to devise suitable schemes that can mitigate the adverse effects of sensor faults. It’s widely recognized that sensor faults can introduce measurement errors, creating a challenge in controller design for nonlinear systems. To ensure desired performance and enhance system safety and reliability, researchers have increasingly focused on fault-tolerant control methods, resulting in significant progress. For instance, one study explored an adaptive event-triggered control approach using fuzzy output feedback for switched nonlinear systems when sensor failures occur. Another study outlined an adaptive fuzzy observer control strategy for switched nonlinear systems, addressing both actuator and sensor faults. Furthermore, a switching methodology has been proposed to handle actuator and sensor failures in the adaptive control problem for nonlinear systems. Moreover, for nonlinear large-scale systems, a well-proven decentralized method based on adaptive control is available, which includes an observer to handle sensor and actuator failures.20–22
On the other hand, input saturation, recognized as an unavoidable non-smooth nonlinear constraint, poses a significant challenge for most practical systems. In control systems, each physical actuator or sensor is susceptible to saturation due to its maximum and minimum limits. This limitation may even cause instability and a deterioration in system performance. 24 At present, several well-established control mechanisms seek to mitigate the detrimental impacts of input saturation on the stability of the system.25,26 For example, under the influence of external disturbance and saturation nonlinearity, an adaptive control problem for nonlinear systems has been investigated. 27 For nonlinear nonaffine systems with saturation nonlinearity, an adaptive control problem has been studied using neural network approximate capabilities. 28 To handle state-constrained nonlinear systems, an adaptive control strategy that takes into consideration saturation nonlinearity and an unknown control direction has been developed. 29 Moreover, an adaptive control problem combining saturation nonlinearity and unmodeled dynamics has been investigated for switched uncertain nonlinear systems. 30 Moreover, for nonlinear systems using fuzzy logic systems and a small-gain technique, an adaptive control problem has been documented under the impact of unmodeled dynamics and input saturation. 31
In the field of nonlinear systems control, the settling time holds significant importance as it shows the rate at which a system approaches its target state. A system that reaches rapid convergence typically shows a shorter settling time, indicating that it can react quickly to incoming information and changes in its surroundings.32,33 This characteristic contributes to enhanced control performance and robustness. Due to its advantages over conventional asymptotic control techniques, such as better anti-disturbance performance, faster convergence rates, and higher tracking precision, finite-time control has attracted more attention recently. 34 Recently, there has been considerable emphasis on the development and evaluation of finite-time control.35,36 For example, researchers have investigated the impact of actuator failures and uncertain control directions on nonlinear systems through an adaptive finite-time control problem. 37 Another study addressed the challenge of adaptive control with a focus on finite-time stability for nonlinear systems with dynamic uncertainties. 38 Furthermore, an adaptive control method has been explored for systems with dynamic uncertainty and actuator faults, emphasizing finite-time stability and leveraging fuzzy estimation properties. 39 Moreover, FLS has been utilized in establishing an adaptive control framework for nonlinear systems, emphasizing finite-time stability under state constraints. 40 Another approach tackled adaptive control problems for nonlinear systems, emphasizing finite-time stability under state constraints and incorporating observer-based strategies along with fuzzy estimation properties. 41
Many of the studies mentioned focus on either finite-time or asymptotic stability of systems. However, a significant challenge in finite-time design arises from the strong influence of the initial state on settling time. For instance, for underactuated flexible joint robots, a robust terminal control strategy utilizing sliding mode techniques has been reported.
42
In the context of servo motor systems, a finite-time continuous terminal sliding mode control approach has been developed.
43
When the initial state is far from equilibrium, the time required for the tracking error to converge significantly increases, posing a practical issue due to the unpredictability of initial states in engineering systems.
44
To mitigate the dependence of finite-time control on initial conditions, researchers have introduced a fixed-time stability control system.45,46 The authors in
47
analyzed an adaptive challenge concerning nonlinear systems in the presence of time-varying actuator difficulties, employing FxTC theory. Moreover, an adaptive approach has been employed to address FxTC issues for nonlinear systems with state constraints and dead zones.
48
In addition, a study focusing on fixed-time stability theory for nonlinear systems with saturation nonlinearity has explored an adaptive control strategy.
49
Additionally, for underactuated aerial robots with flexible joint manipulators, a convergent robust fixed-time sliding mode control method has been introduced.
50
Finally, a fixed-time stability adaptive problem incorporating quantization and command filters has been investigated for nonlinear systems.
51
This work draws inspiration from the above-described results to investigate the adaptive control problem concerning fixed-time stability for nonstrict-feedback nonlinear systems influenced by input saturation and sensor faults. The key contributions of this article are outlined as follows: (i) This paper addresses the challenge of adaptive fixed-time control for nonlinear systems experiencing input saturation and sensor faults. Unlike existing methods,18,19 this study uniquely considers both sensor faults and saturation nonlinearity in nonstrict-feedback nonlinear systems. The introduction of a smooth non-affine function to estimate the saturation signal effectively overcomes the difficulties posed by non-smooth saturation nonlinearity. (ii) In contrast to finite-time control methods,36–38 where the settling time depends on the system’s initial state, FxTC offers a significant advantage by making the settling time dependent solely on the design parameters. This feature aligns more closely with the demands of practical systems, enhancing the proposed control strategy’s applicability and appeal. Since input saturation and sensor faults are prevalent in most real-world applications, the focus of this work on integrating FxTC with these factors is of significant research importance. (iii) An adaptive fixed-time control strategy is developed using the backstepping technique and grounded in the Lyapunov function method. This strategy guarantees that all signals within the closed-loop system remain bounded, while the system’s output tracks the desired signal to a bounded compact set within a fixed time. Importantly, the convergence time of the tracking error is independent of the system’s initial states, further underscoring the robustness of the proposed approach.
The paper is structured as follows: Section II provides preliminaries and formulates the problem, while Section III presents the main results. In Section IV, two examples are discussed, and finally, Section V offers concluding remarks.
Problem formulation and preliminaries
Consider the nonstrict-feedback nonlinear system as

The model of input saturation u(v) is described as
24


Therefore, u(v) is formulated as




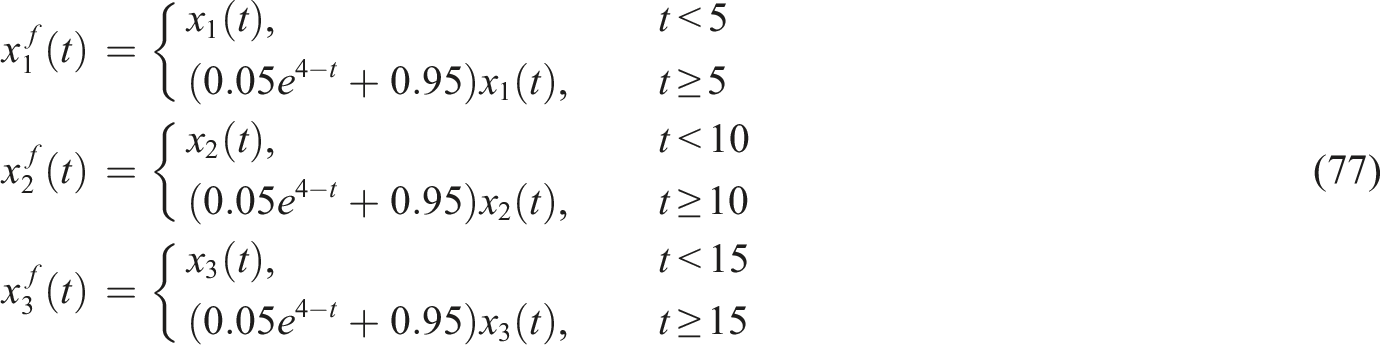
The following equation describes the representation of the measured state for system (1) when sensor faults are taken
18

The goal of this study is to design a fixed-time adaptive control method for the nonlinear systems (1) such that: (i) All close-loop variables are bounded, and (ii) The tracking error converges towards the origin in a fixed-time.
44
Take the nonlinear system as

44
System (9) exhibits fixed-time stability if it is stable within a finite time frame, and the convergence time T is bounded by a definite upper limit T
m
that remains independent of the initial state.
44
If there exist positive constants α, β, p > 1, 0 < q < 1, and 0 < η < ∞ satisfying the inequality then the trajectory of system (9) is globally fixed-time stable. Furthermore, the settling time T can be approximated as



24
For

24
For constants τ > 0, γ > 0, λ > 0 and variables υ and ω, one has

44
For any given

25
The desired trajectory y
d
and its first derivative
18
In the case of sensor faults affecting the ith sensor, the failure factor ρ
i
(t) adheres to the condition ρi,0 ≤ ρ
i
(t) ≤ 1 where ρi,0 > 0 is a constant.
Assumption 1 is practical because it reflects typical real-world conditions where desired outputs and their rates of change remain within bounded limits and vary smoothly. This ensures that the control system can effectively track the desired trajectory without unexpected variations. Without this assumption, designing a control strategy that can handle unbounded or discontinuous trajectories would be significantly more challenging. This type of assumption is commonly found in control literature, such as in 23–25.
Assumption 2 is important because it provides a bounded range for the extent of sensor faults, allowing the control system to account for these faults in a controlled manner. By defining this range, the control strategy can be designed to maintain system performance even in the presence of sensor inaccuracies, ensuring that the system remains robust and reliable. This type of assumption is also commonly found in control studies, such as in Reference 18. This study employs RBFNN to model nonlinear functions, demonstrating its ability to accurately estimate any continuous function f(Z) over a compact set The block diagram of proposed fixed-time control scheme is shown in Figure 1.



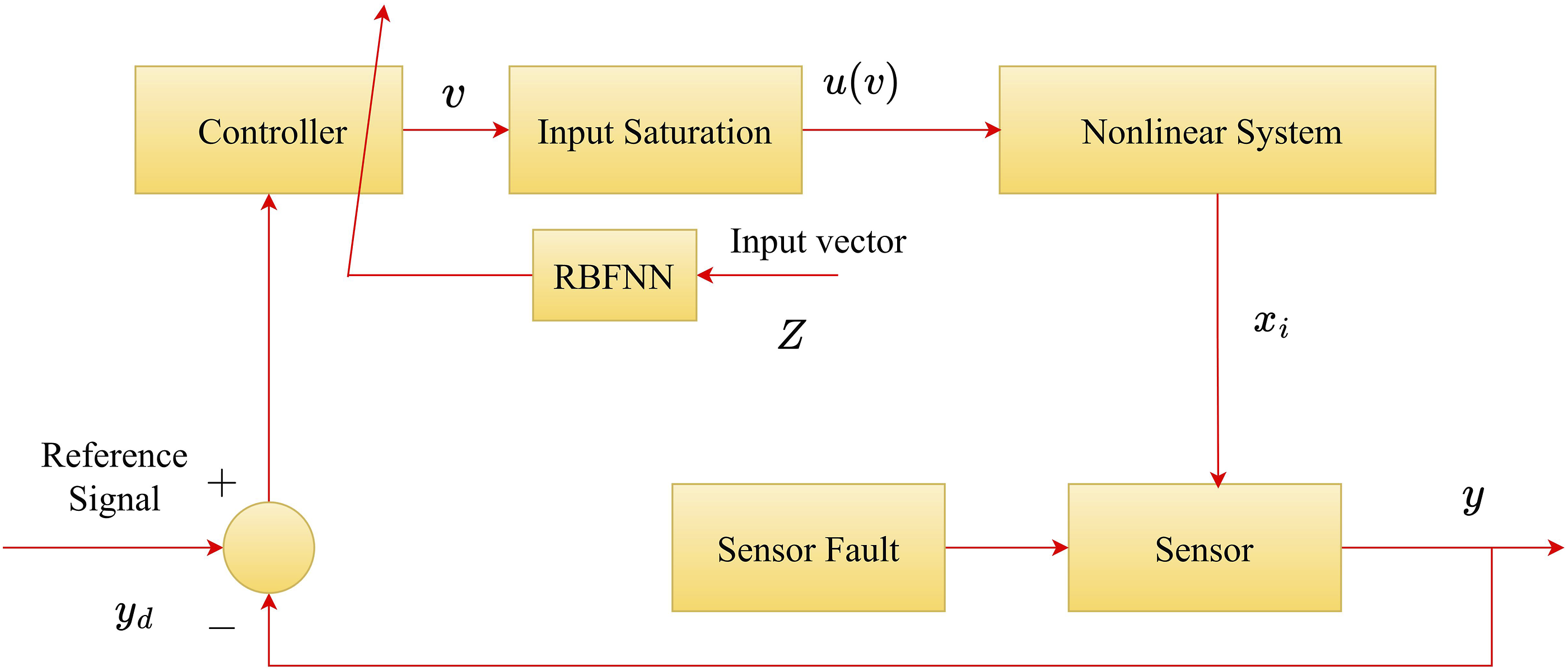
Block diagram of proposed fixed-time control scheme.
Main results
This section proposes a fixed-time adaptive approach using backstepping technology for the system (1). The real state of variables becomes unavailable as a result of sensor faults. The following coordinate transformations must be defined as part of the design process

Based on (1), (8), and (19), one has where λ1 is a positive design parameter, and ρ1,0 defined in Assumption 2. Using (20), the derivative of V1 satisfies Applying Lemma 4, one has By using (20) into (22), gives Let As By using Lemma 4, one has and the adaptation law as










i (2 ≤ i ≤ n − 1): Based on (1), (8), and (19), one has Now, let’s consider the Lyapunov function candidate as By using (31), the time derivative V
i
, gives Substituting (30), (35) into (34), we have Since f
i
(Z
i
) involves the unknown nonlinear function f
i
(x), the RBFNN serves as an approximator to represent f
i
(Z
i
) with any desired precision ɛ
i
> 0 such that Design the virtual controller α
i
as









Step n: Based on (1), (8), and (19), one has Chose the candidate of Lyapunov function as The derivative of V
n
gives According to Lemma 2, we have By using (46) into (45), one has Since f
n
(Z
n
) involves the unknown nonlinear function f
n
(x), the RBFNN serves as an approximator to represent f
n
(Z
n
) with any desired precision ɛ
n
> 0 such that By using Lemma 4, one has Design the real controller v as and the adaptive law as Combining (50) and the fact that









For system (1) with input saturation (2) and sensor faults (8). Through the utilization of a real controller (50), virtual controllers (28), (39), and an adaptive law (29), (40), (51), the global fixed-time stability of system (1) is achieved. The tracking error effectively converges to a compact neighborhood around the origin. The closed-loop system is ensured to be stable within a fixed time, and the convergence time is bounded by a specific upper bound.
It is noted that By using (24)–(55) into (53), we have By using Lemma 3, we have By using (56), (57), (58), one has By using Lemma 2, we have







Lemma 1 proves that (1) is practically fixed-time stable and converges to a compact set. Then, the settling time is From the definition of V
n
, one has By selecting the right design parameters, the tracking error can be decreased to an optimal range in a fixed time. The flowchart of proposed fixed-time control algorithm is shown in Figure 2.



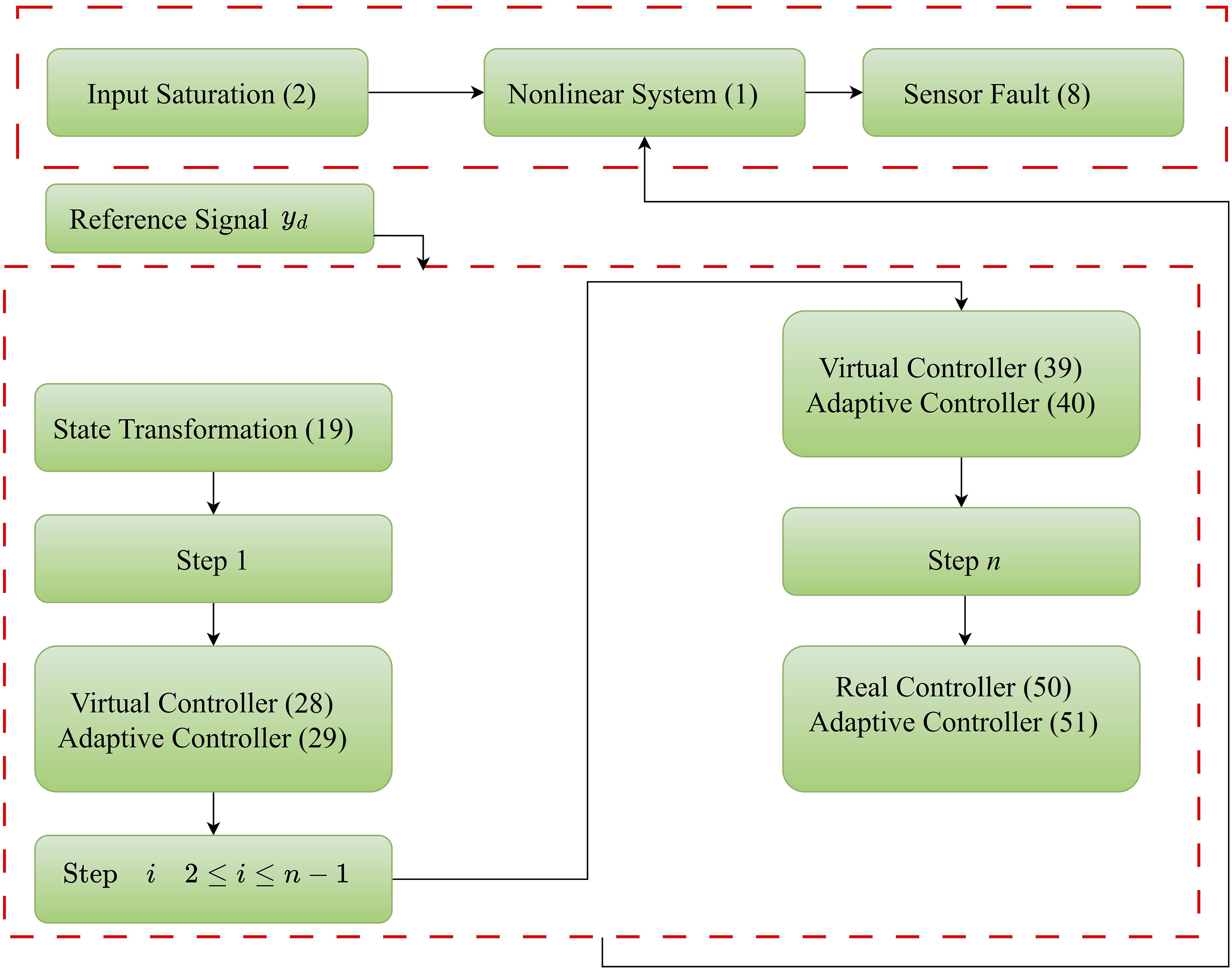
Flowchart of proposed fixed-time control algorithm.
Equation (62) reveals that the convergence time boundary T remains unchanged regardless of the initial state. The proposed FxTC method ensures precise tracking performance within a fixed-time, addressing the limitation of finite-time control systems that are sensitive to initial conditions.
In summary, our work varies in the following ways from the recognized results in adaptive FxTC given in reference 44. Unlike,44–46 the proposed FxTC strategy considers sensor faults as well as input saturation. This addition increases the control scheme’s adaptability and increases its suitability for real-world engineering situations.
Theoretically, by decreasing a
i
and increasing c
i
, k
i
, κ
i
, and γ
i
one can enhance the performance of the system represented by (60). As emphasized in (50), there is a trade-off to be made because higher values of c
i
and k
i
could lead to stronger control signals. Thus, it’s important to carefully balance reducing the associated control effort with maximizing system performance. The values of the design parameters are chosen using a trial-and-error method, as no alternative method is available for determining the optimal parameters.
The main innovations of the proposed controller lie in its integration of fixed-time control (FxTC) with input saturation and sensor faults, addressing key challenges in practical systems. Unlike finite-time control methods,36–38 which depend on the system’s initial state for settling time, FxTC ensures that settling time is governed solely by design parameters, offering a consistent and predictable convergence time. This makes the controller highly applicable and reliable for real-world scenarios. Additionally, the controller’s novel design incorporates strategies to manage input saturation and sensor faults, enhancing its robustness and effectiveness in handling common practical issues. This combination of fixed-time control with real-world imperfections represents a significant advancement in control design, providing a more flexible and resilient solution for complex systems.
This paper distinguishes itself from existing work54,55 by focusing on fixed-time stability, unlike,
54
which proposes an observed-based adaptive controller for nonlinear systems with dead-zone nonlinearity and,
55
which presents an output-feedback adaptive controller considering input dead-zone and saturation. The emphasis on fixed-time stability offers a practical advantage, aligning better with real-world system requirements. By integrating fixed-time control with input saturation and sensor faults, which are common in practical scenarios, this paper highlights the significant research importance of its approach.
The research presented in this paper is distinct from
56
and,
57
which address fault-tolerant schemes and secure filter designs for switched linear parameter-varying and cyber-physical systems, respectively. In contrast, our study focuses on non-switched systems and explores fixed-time control under sensor faults. Future work will extend this research to switched systems. Additionally, while Haiyang et al. (2023)
58
investigate cyber-attacks and actuator failures, our paper specifically deals with nonlinear systems under sensor faults. Future research will also address the challenges of cyber-attacks and actuator faults.
Simulation results
This section provides two examples to illustrate the effectiveness of the proposed control method. For the implementation, we used MATLAB software on an HP Laptop 15 with a 12th Gen Intel Core i5-1235U processor.
To show the practicality of the suggested control strategy, let us examine the dynamics of a pendulum system affected by disturbance The input saturation u(v) is defined as The selection of design parameters follows a trial-and-error method, as k1 = 5, k2 = 5, c1 = c2 = 8, a1 = 0.5, a2 = 1.5, λ1 = 15, λ2 = 20, κ1 = 3, κ2 = 4, γ1 = 3, γ2 = 3. The center and the width of the Gaussian function are chosen as μ
i
= [−2, 2] and η
i
= 2. The initial conditions are chosen through a trial-and-error method, as follows Figures 3–11 display the results of the simulation. Figure 3 illustrates the trajectories of the reference signal y
d
, the state variable x1 in the absence of sensor faults, and the state variable To validate the effectiveness of the proposed control approach, we compared it with the finite-time control method presented in 32. The virtual law α1, control law v, and adaptive laws The design parameters and initial conditions are maintained the same as those in the proposed approach to ensure a fair comparison. Figure 10 demonstrates that the tracking error in the proposed fixed-time control (FxTC) strategy converges significantly faster than in the finite-time control method outlined in 32. Additionally, Figure 11 presents the comparison of the system input v and control input u. The proposed method’s system input is denoted as u
P
and the existing method as u
E
, while the control inputs are represented as v
P
and v
E
, respectively. Both figures clearly show that the FxTC strategy outperforms the finite-time control method, with the proposed approach achieving superior tracking performance and faster convergence. Moreover, the results indicate that the improved tracking accuracy in the FxTC method results in higher control effort, as evidenced by the larger control inputs in Figures 10 and 11.










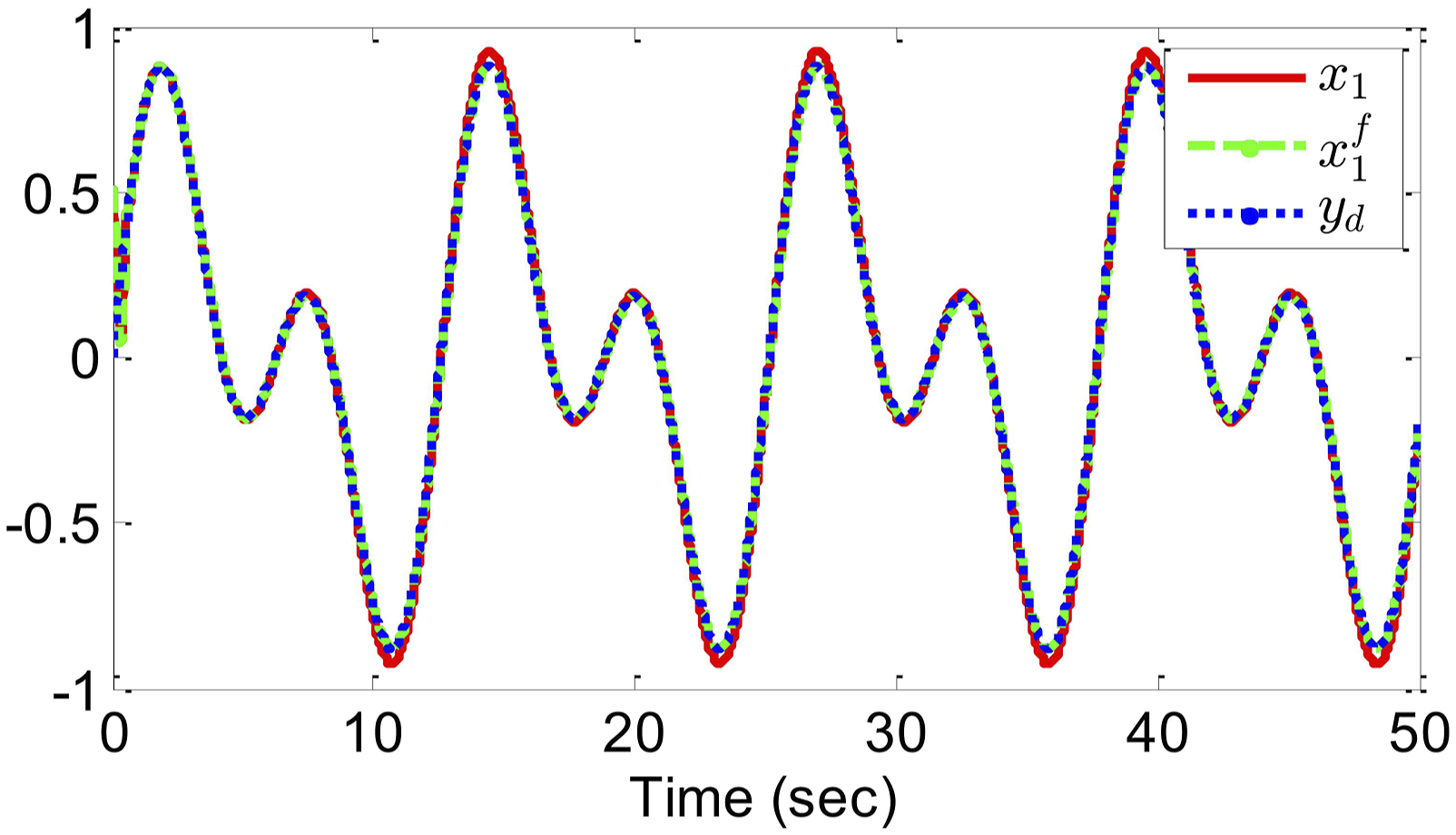
Trajectories of x1,
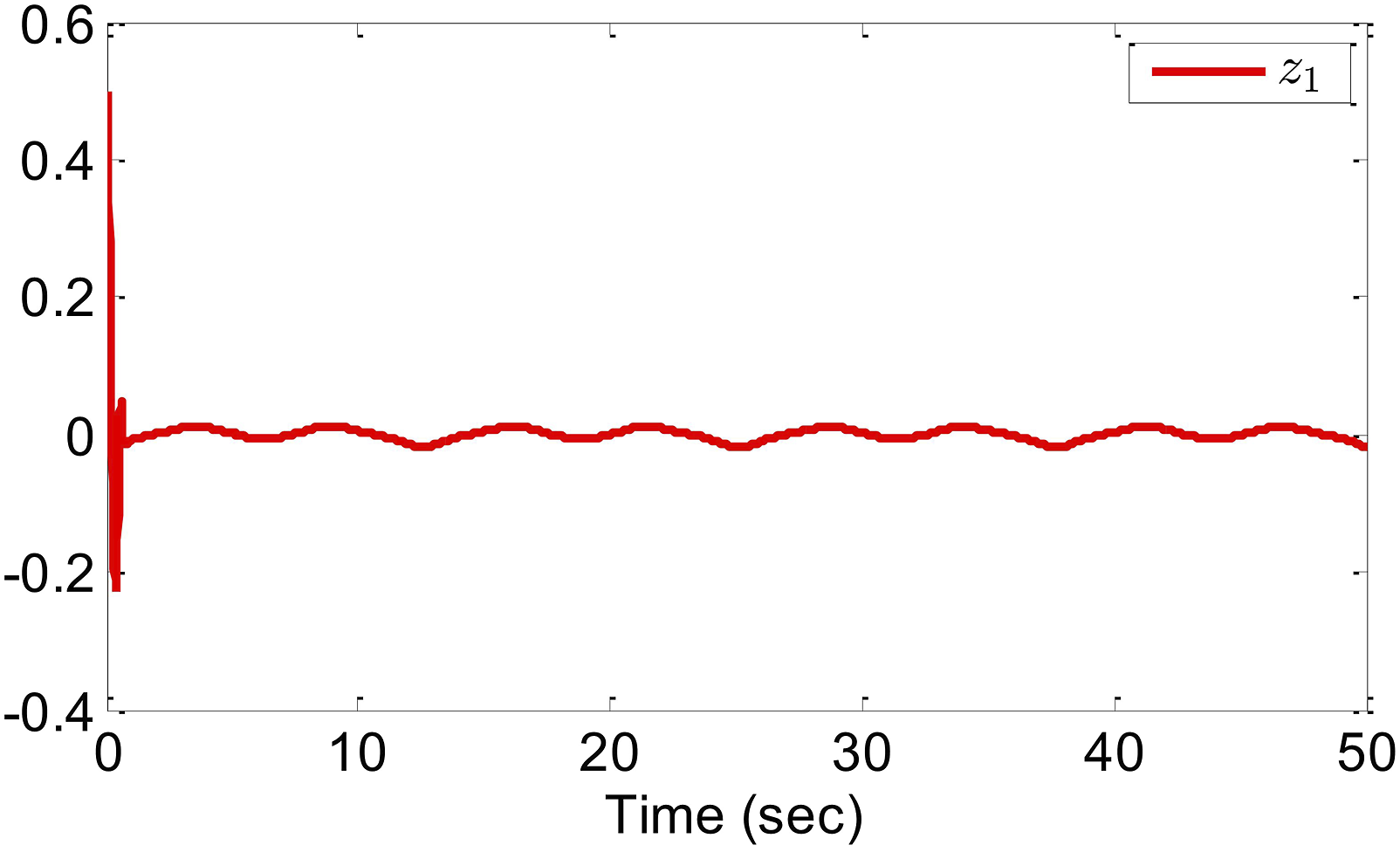
The trajectory of the tracking error z1.
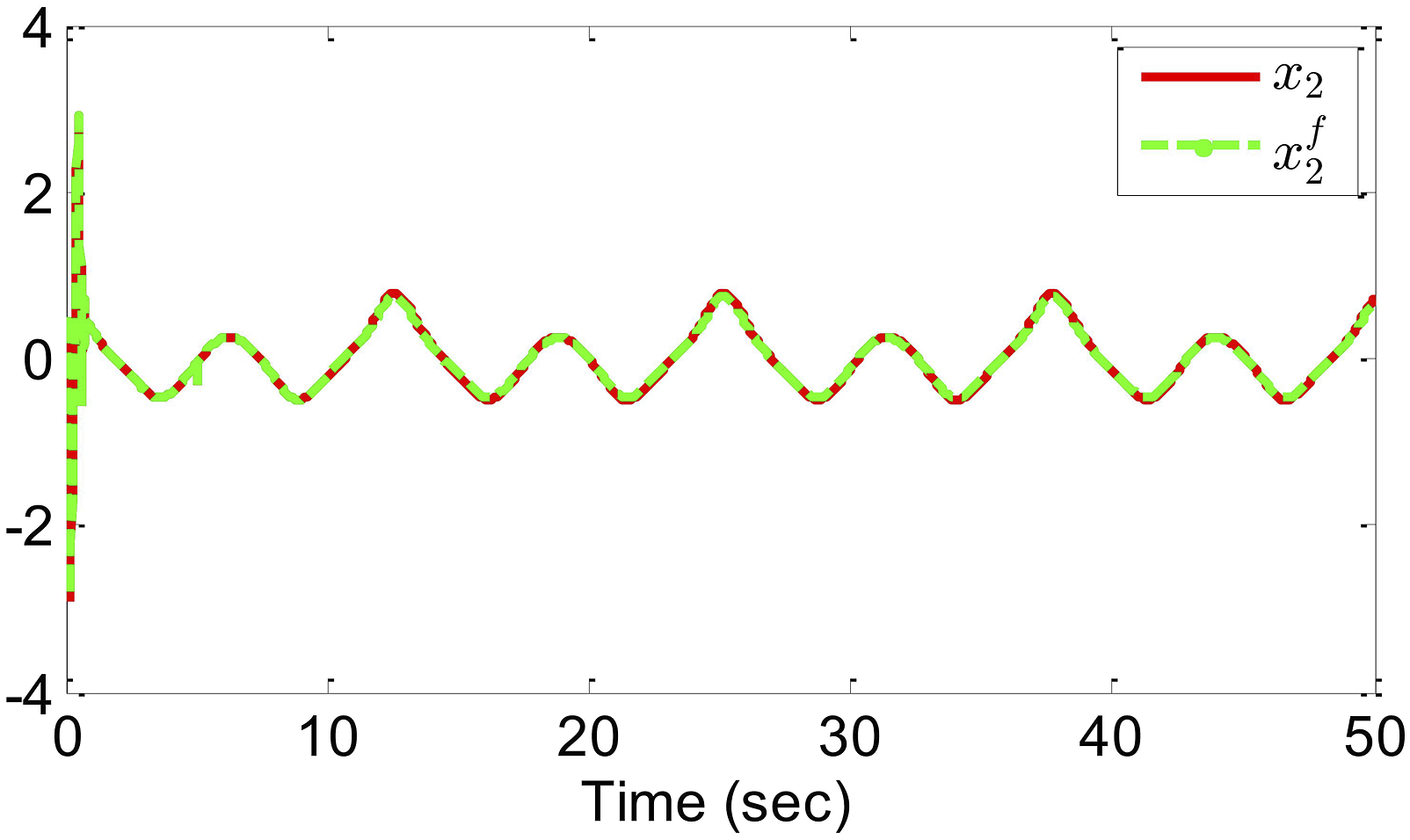
The trajectories of x2 and
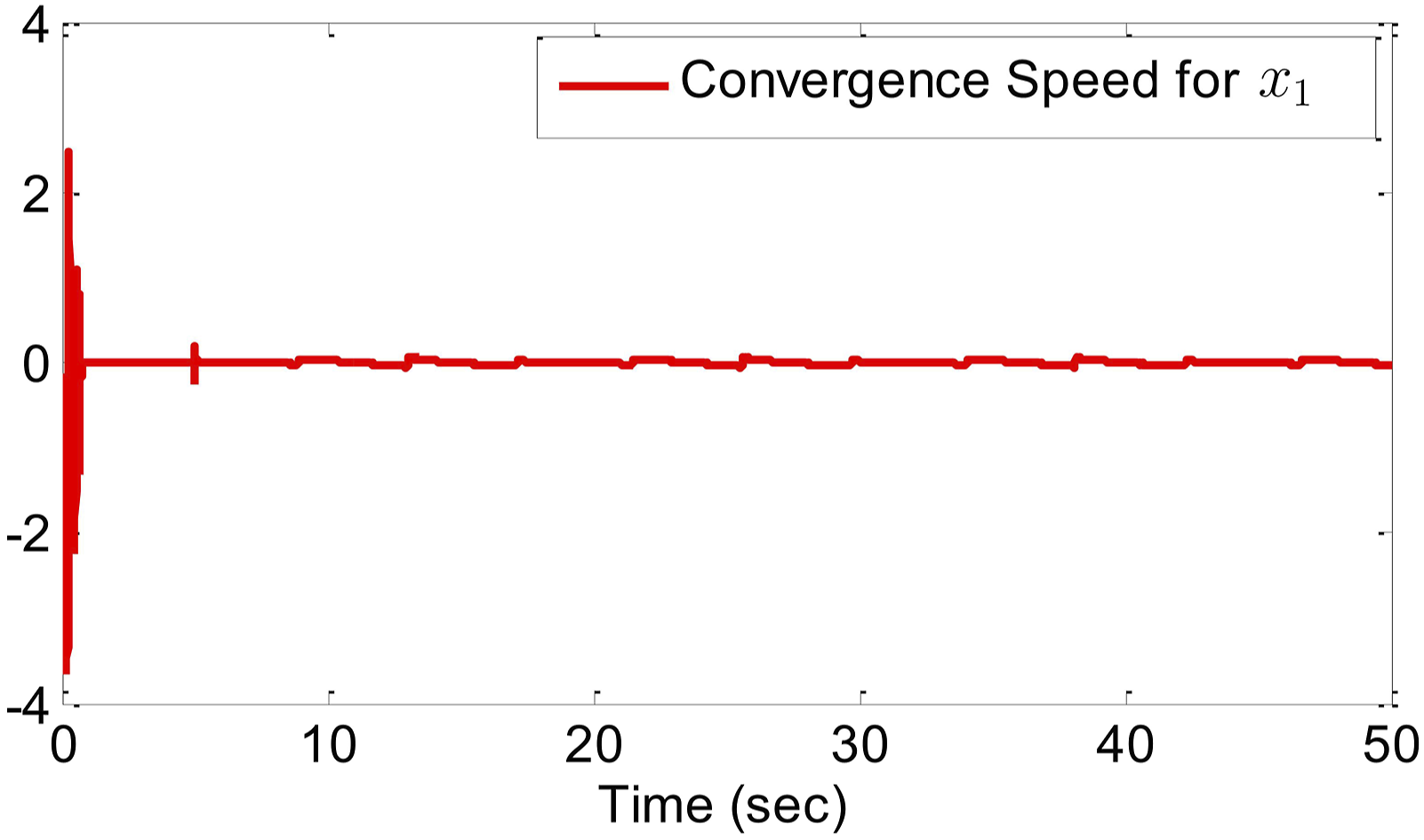
Convergence Speed for x1.
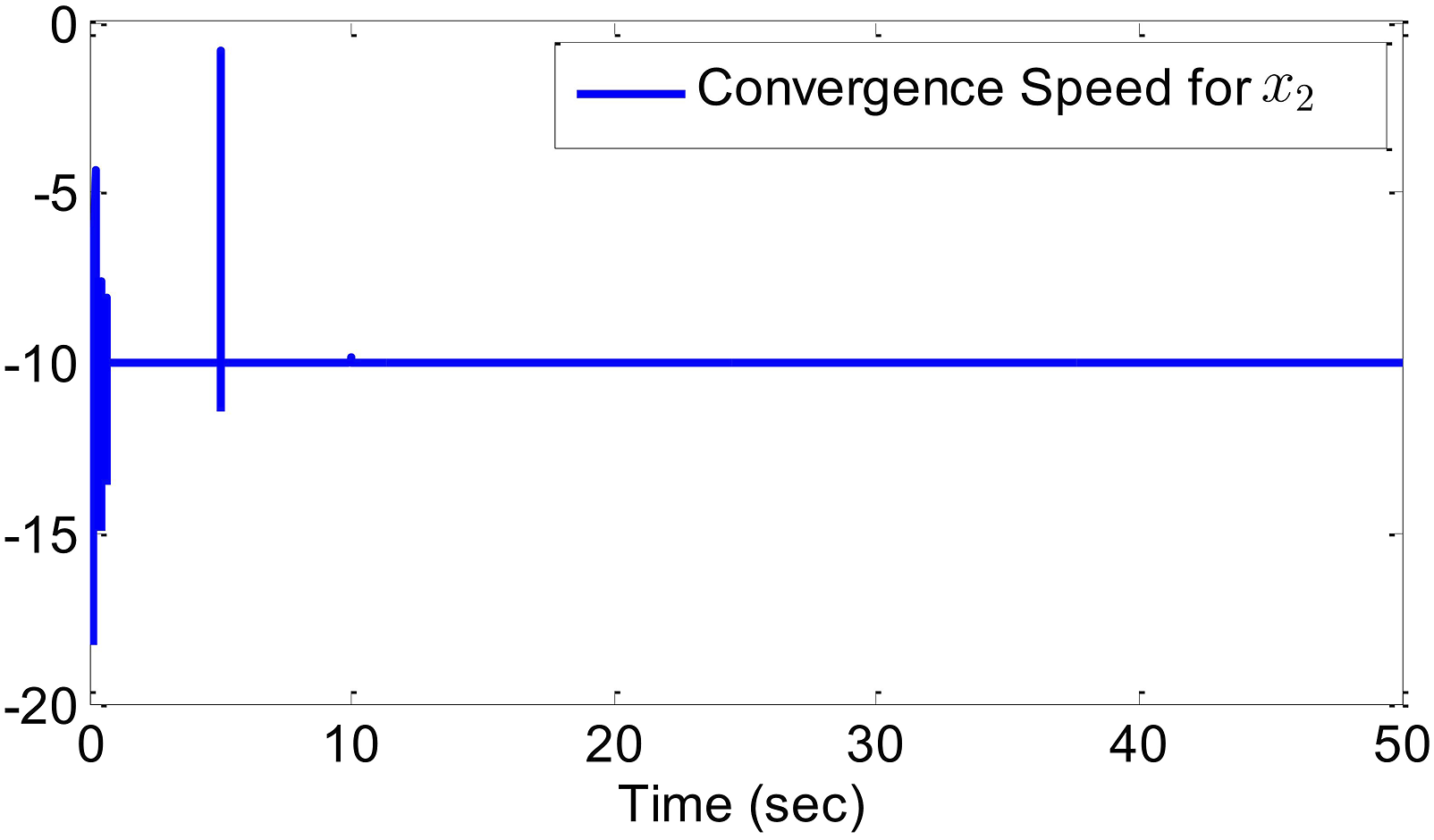
Convergence Speed for x2.
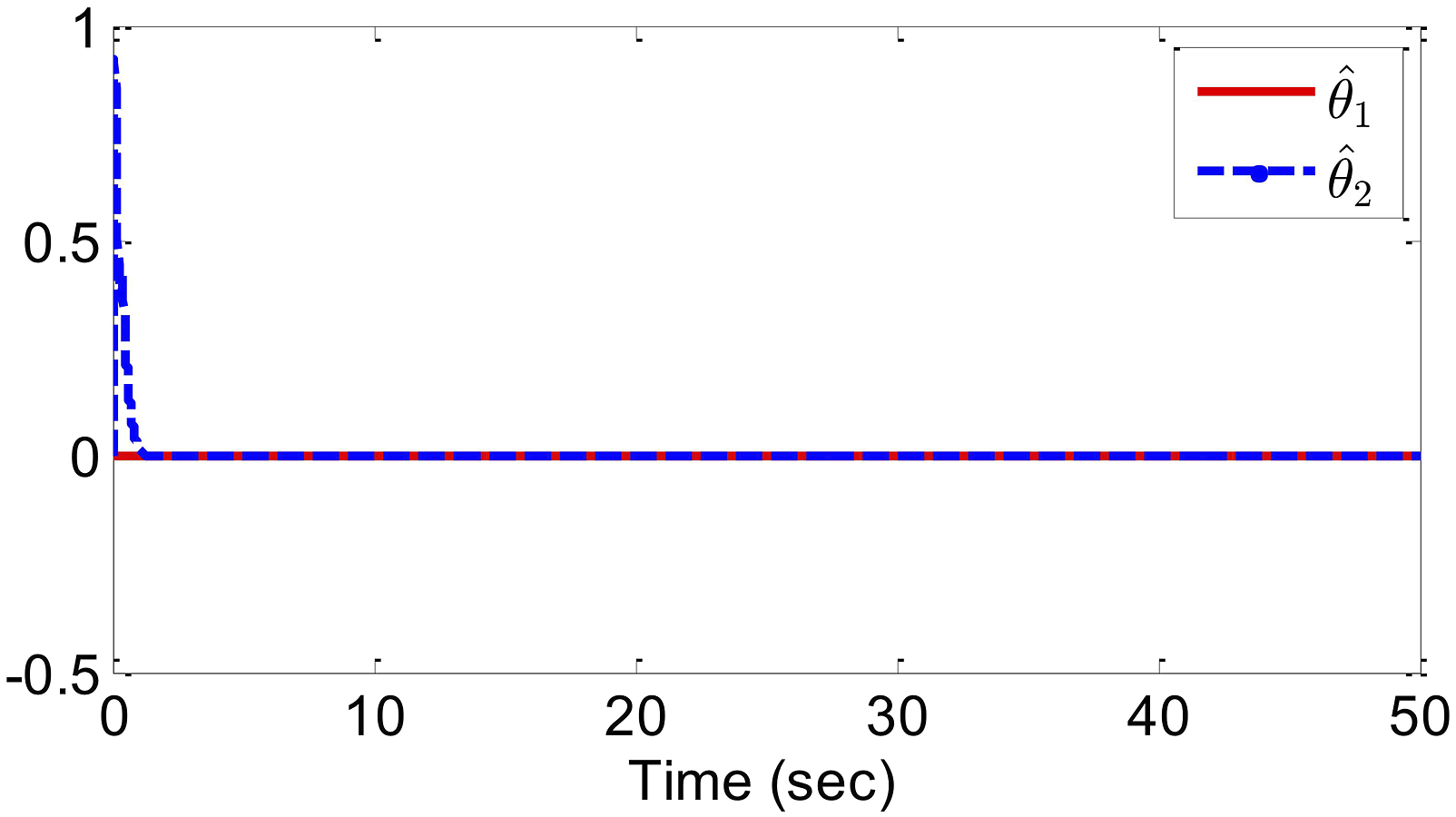
The behaviors of the adaptive laws
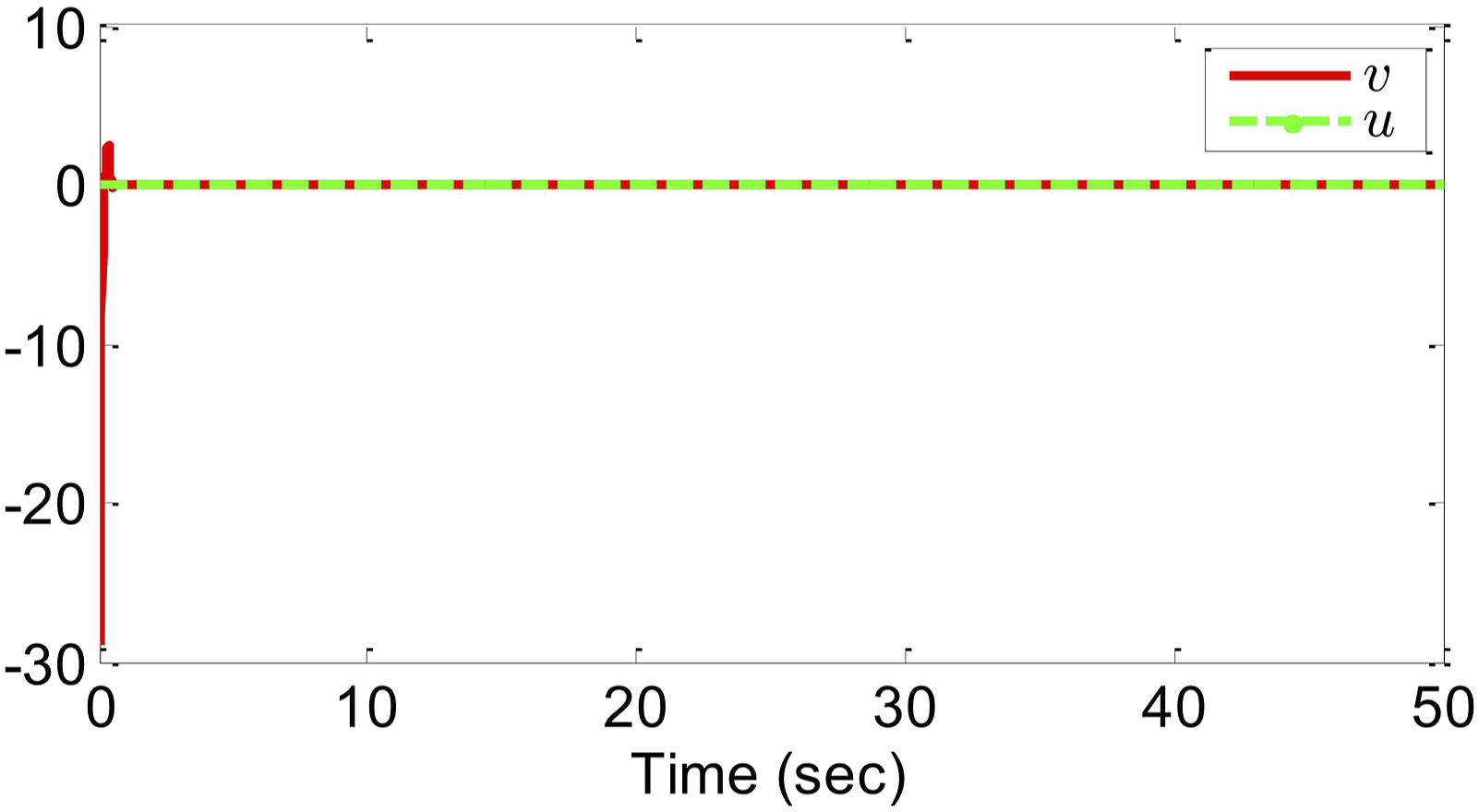
System input u and control input v.
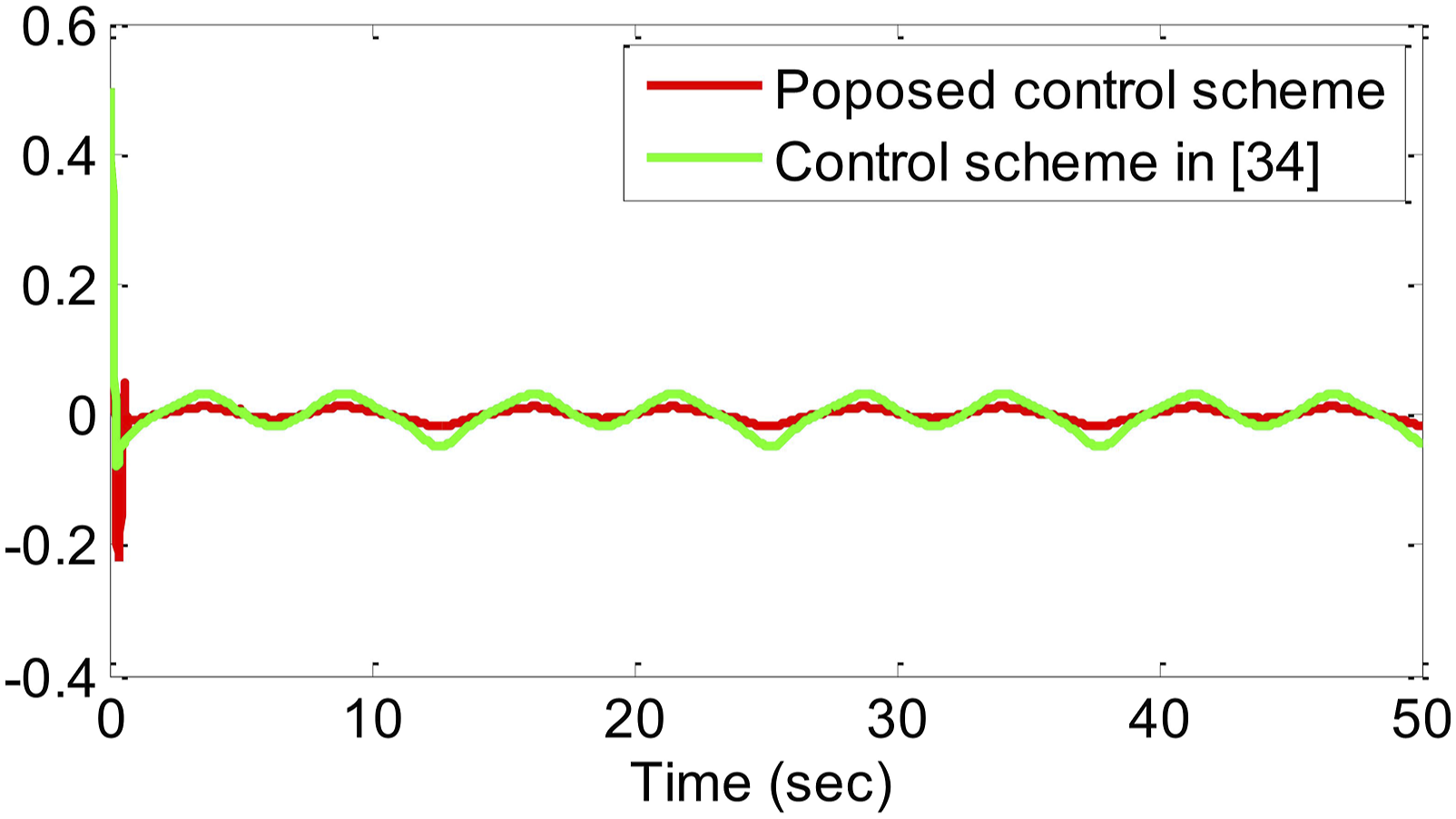
The trajectories of tracking error z1 under two methods.
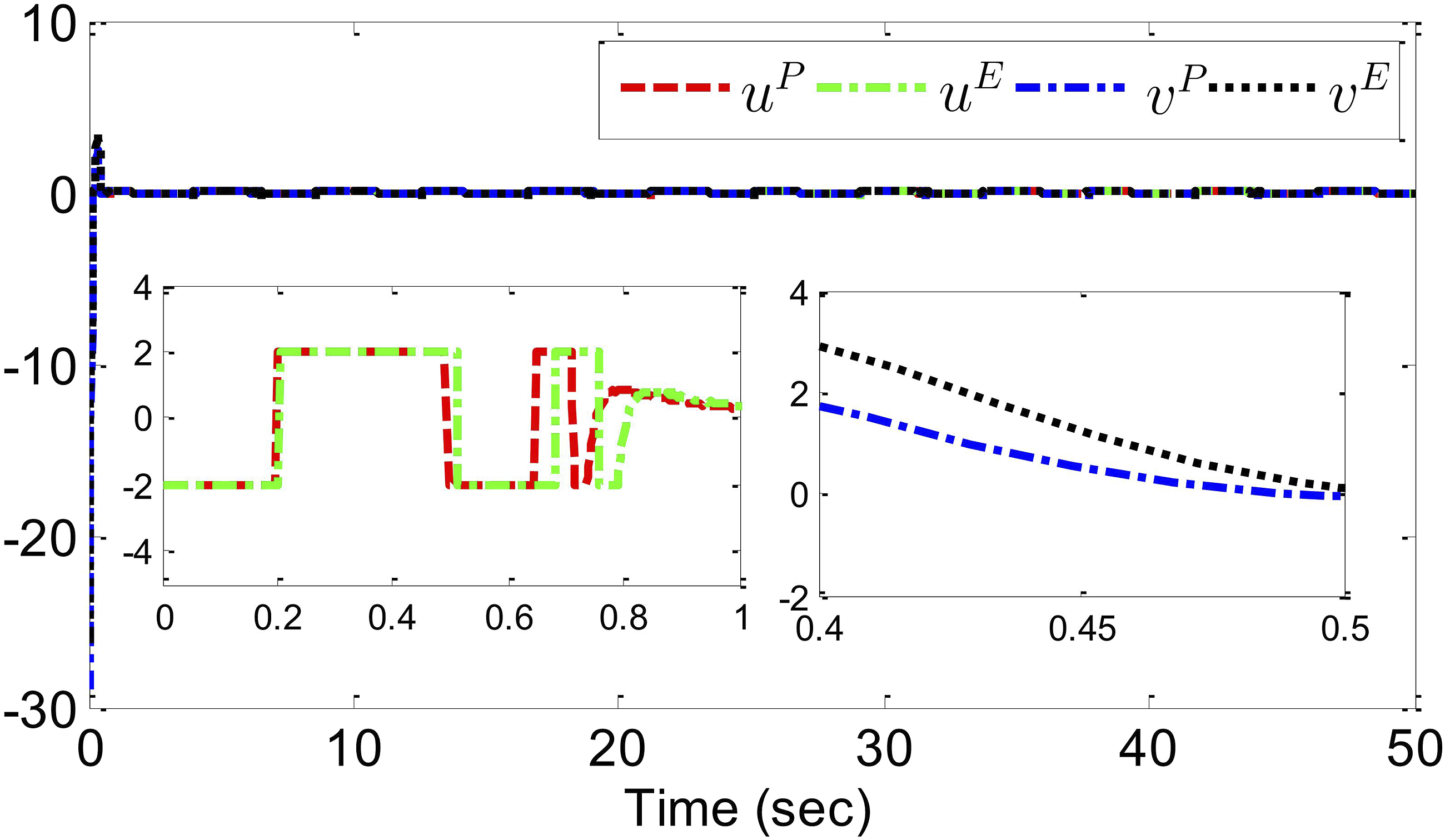
System input u P and u E and control input v P and v E under two methods.
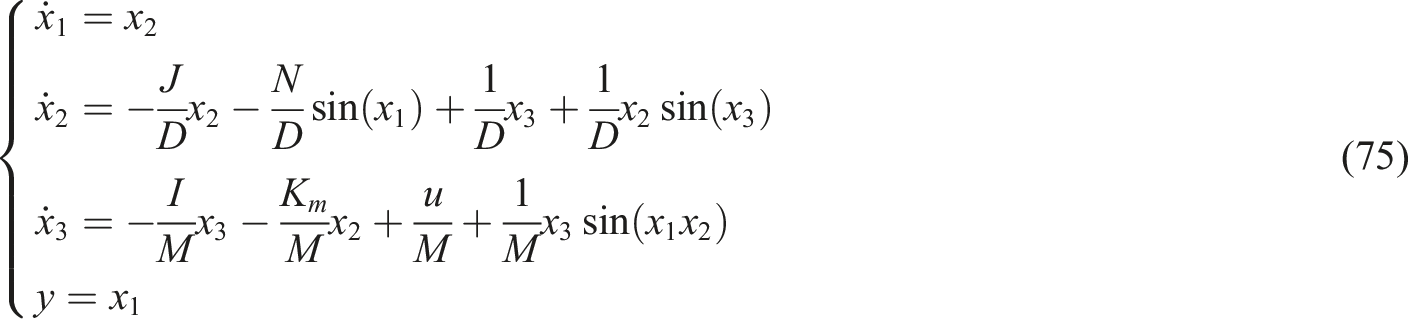
Consider a one-link manipulator, whose dynamic system is described as
53
The saturation nonlinearity u(v) in the actuator is defined as Design the virtual laws, control law, and the adaptive laws as The selection of design parameters follows a trial-and-error method, as c1 = 10, c2 = 15, c3 = 20, k1 = 10, k2 = 10, k3 = 10, a1 = 4, a2 = 4, a3 = 4 λ1 = 5, λ2 = 5, λ3 = 5, γ1 = 0.5, γ2 = 0.5, γ3 = 0.5, κ1 = 0.5, κ2 = 0.5, κ3 = 0.5. The center and the width of the Gaussian function are chosen as μ
i
= [−2, 2] and η
i
= 2. The initial conditions are chosen through a trial-and-error method as Figure 12 displays the trajectories of the reference signal y
d
, the state variable x1 without sensor failures, and the state variable Similar to Example 1, we validated the effectiveness of the proposed control approach by comparing it with the finite-time control method presented in 32. The virtual law α1, control law v, and adaptive laws





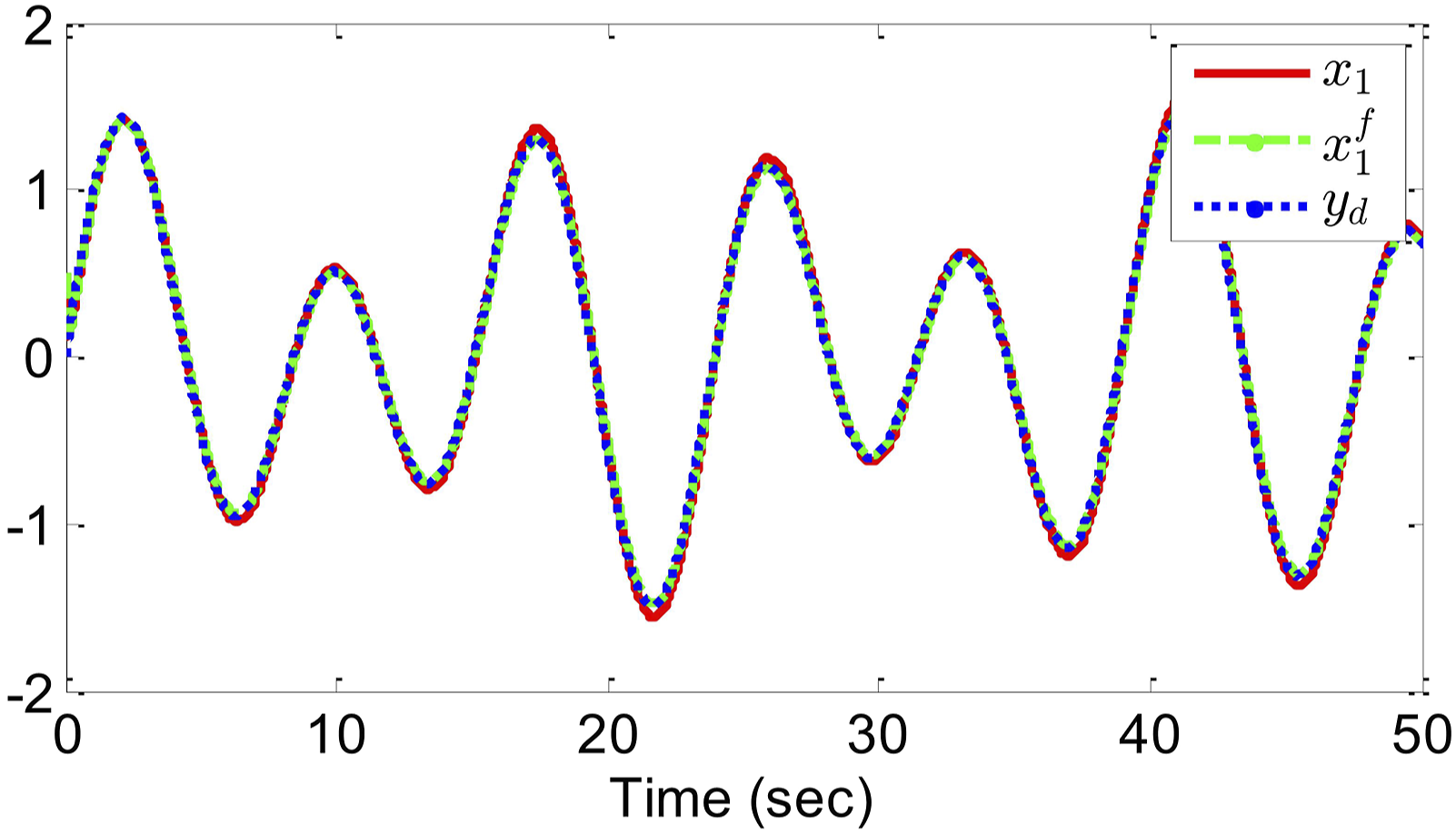
Trajectories of x1,
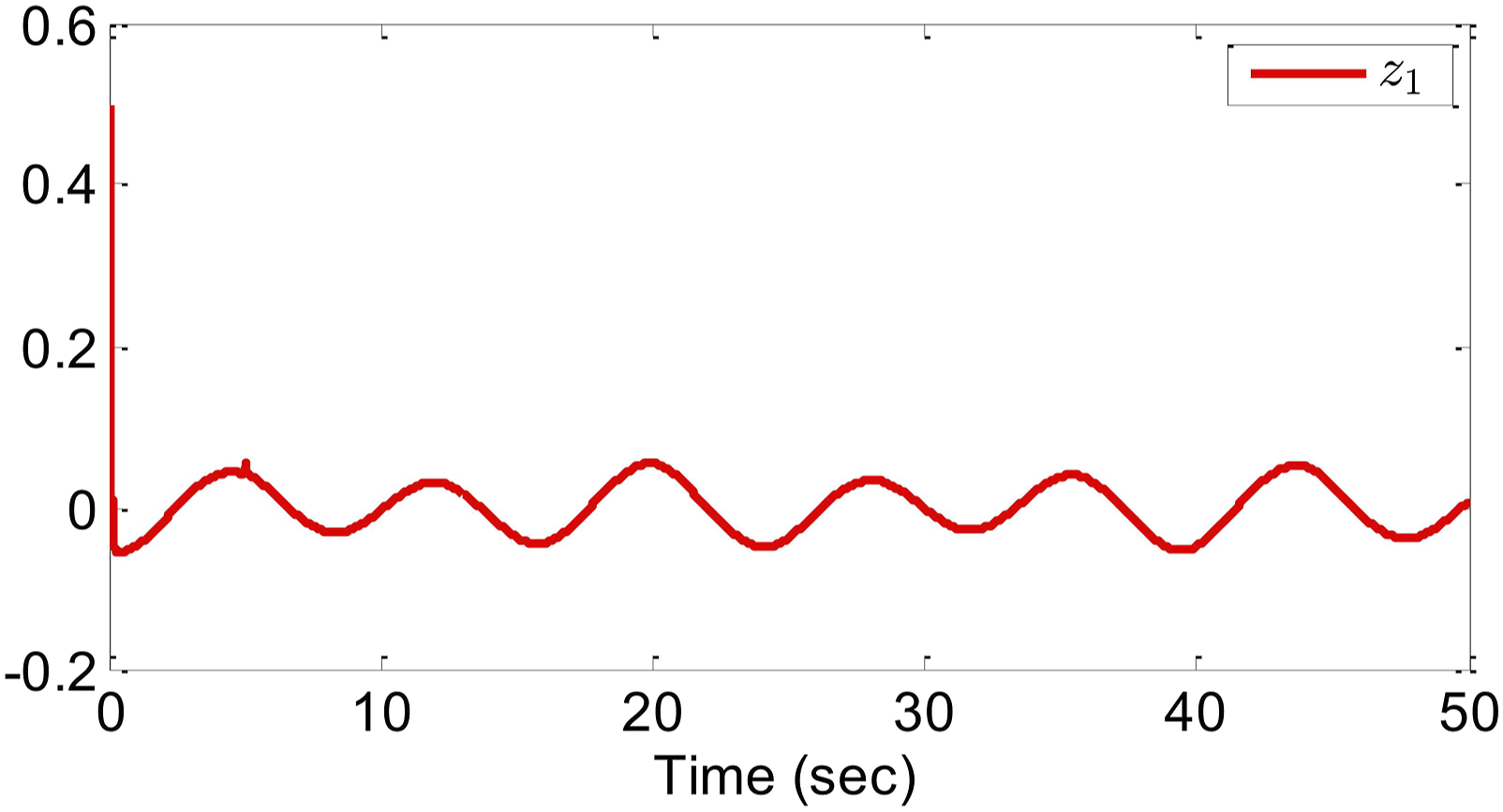
The trajectory of the tracking error z1.
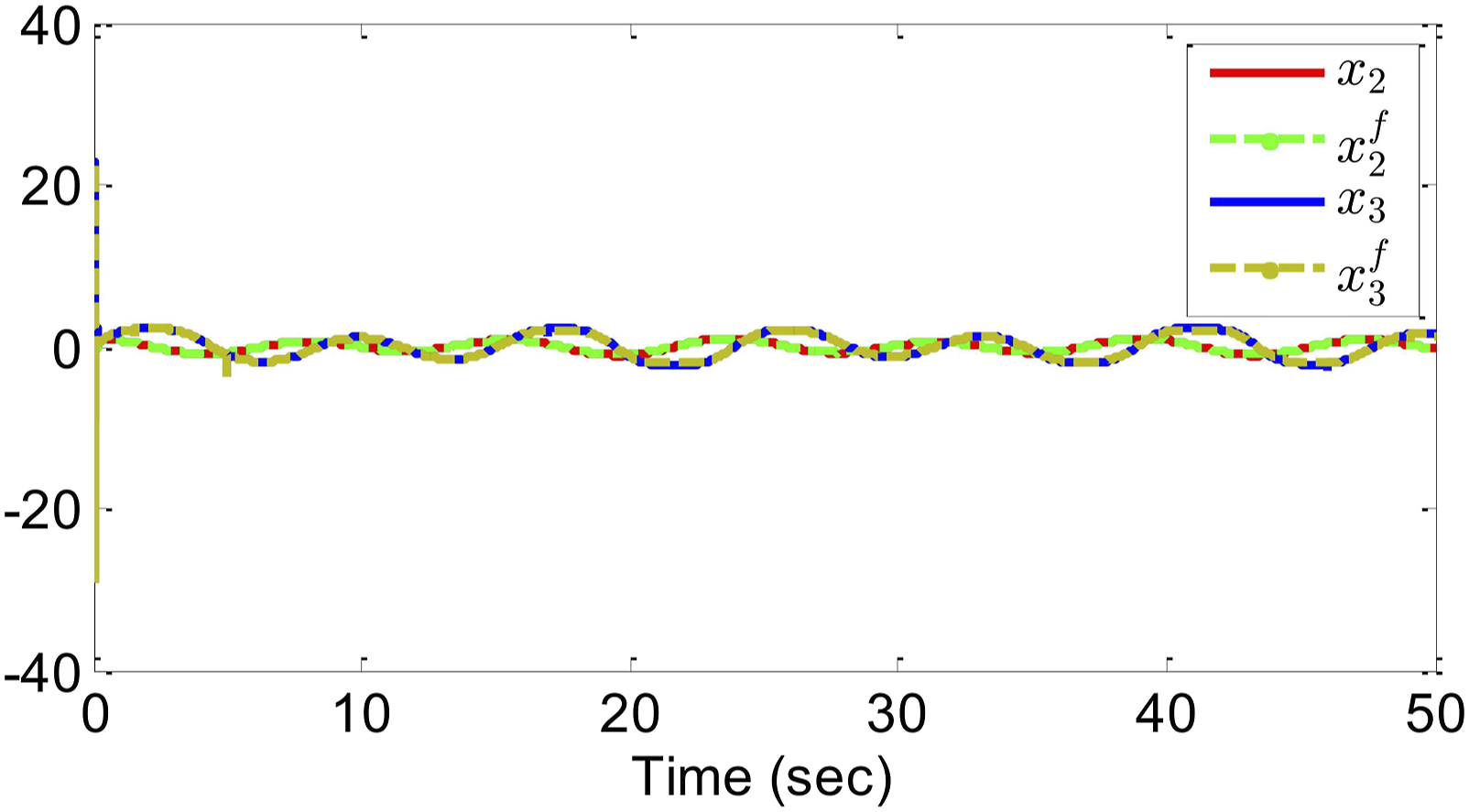
The trajectories of x2,
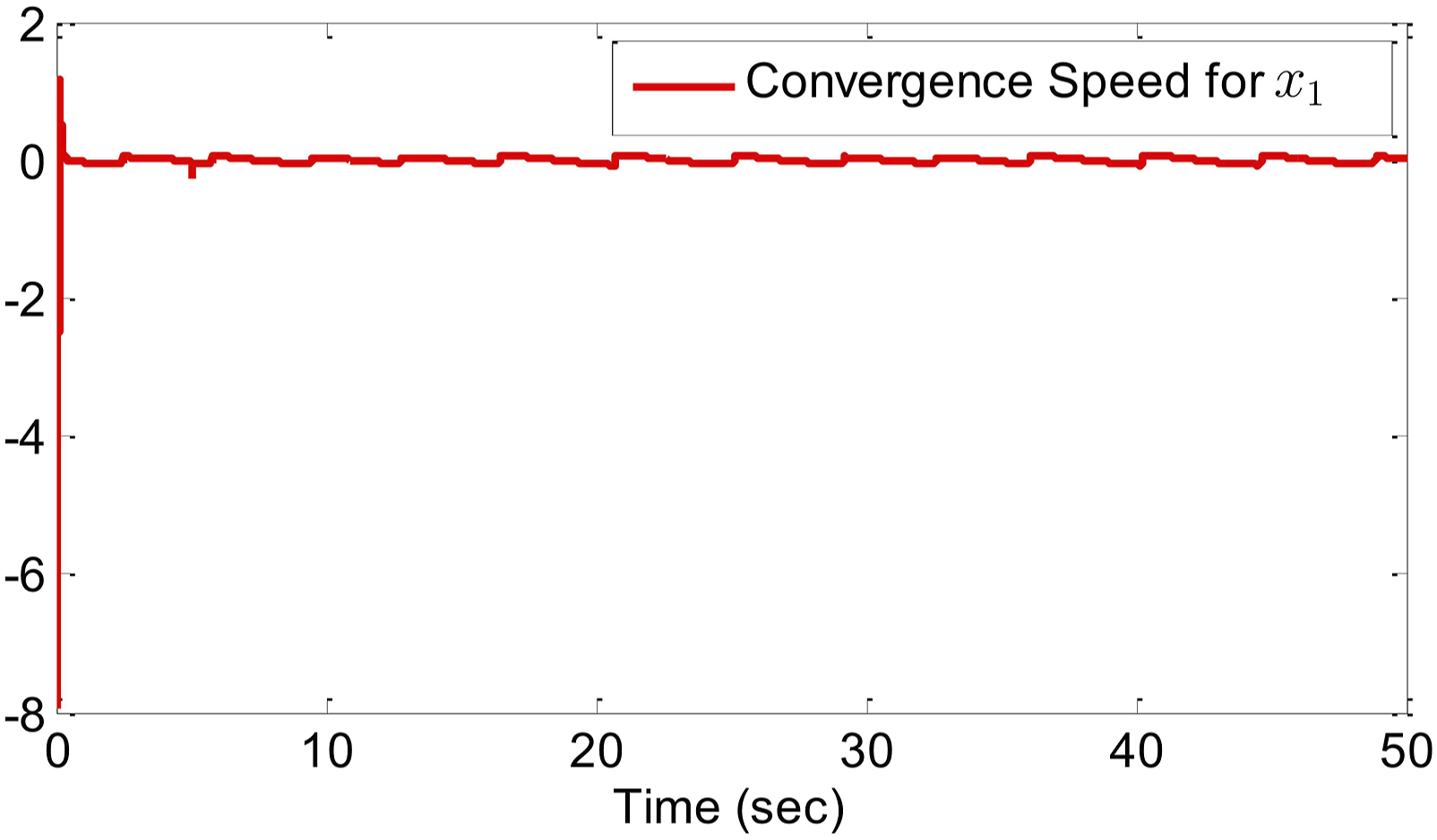
Convergence Speed for x1.
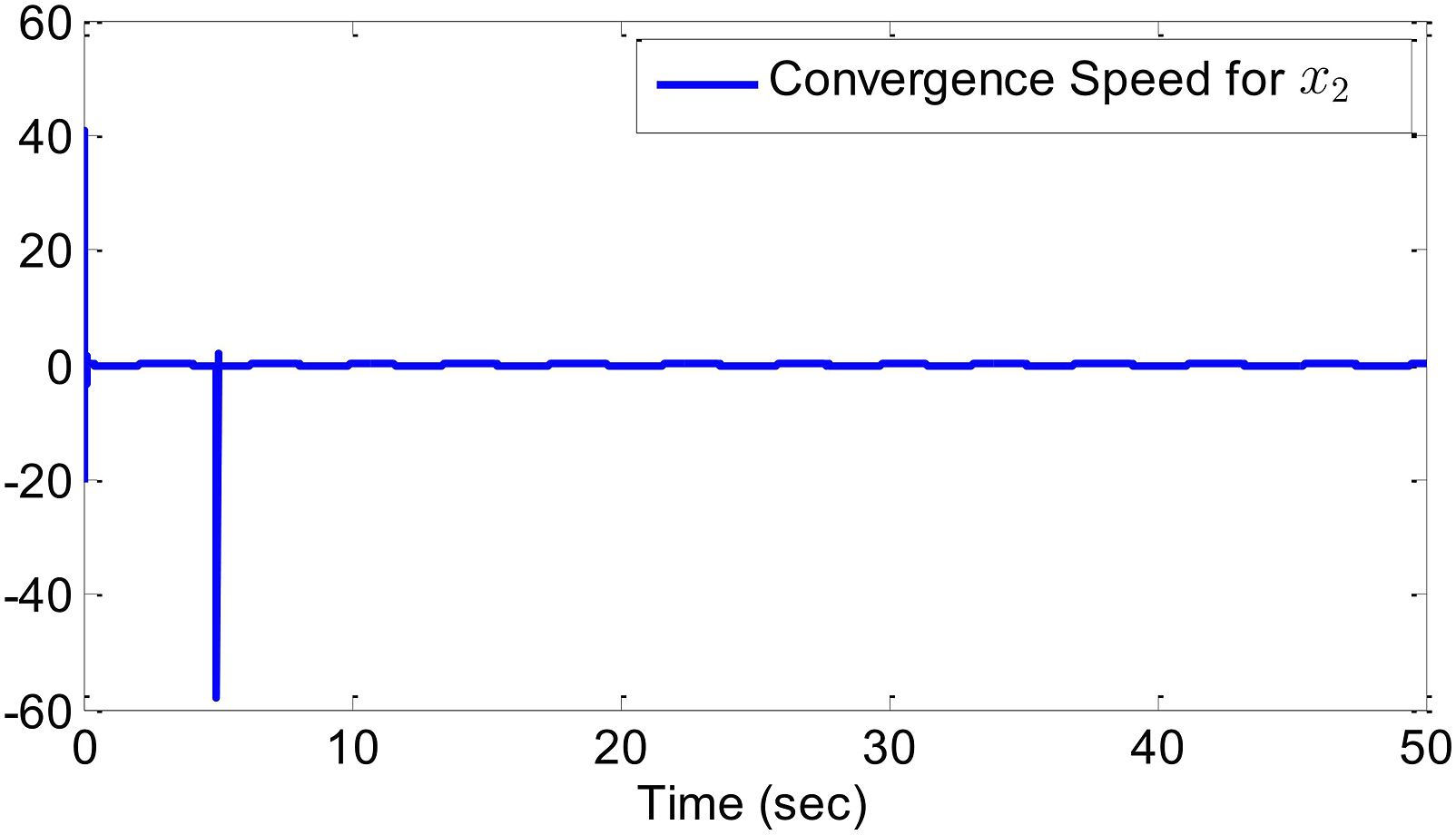
Convergence Speed for x2.
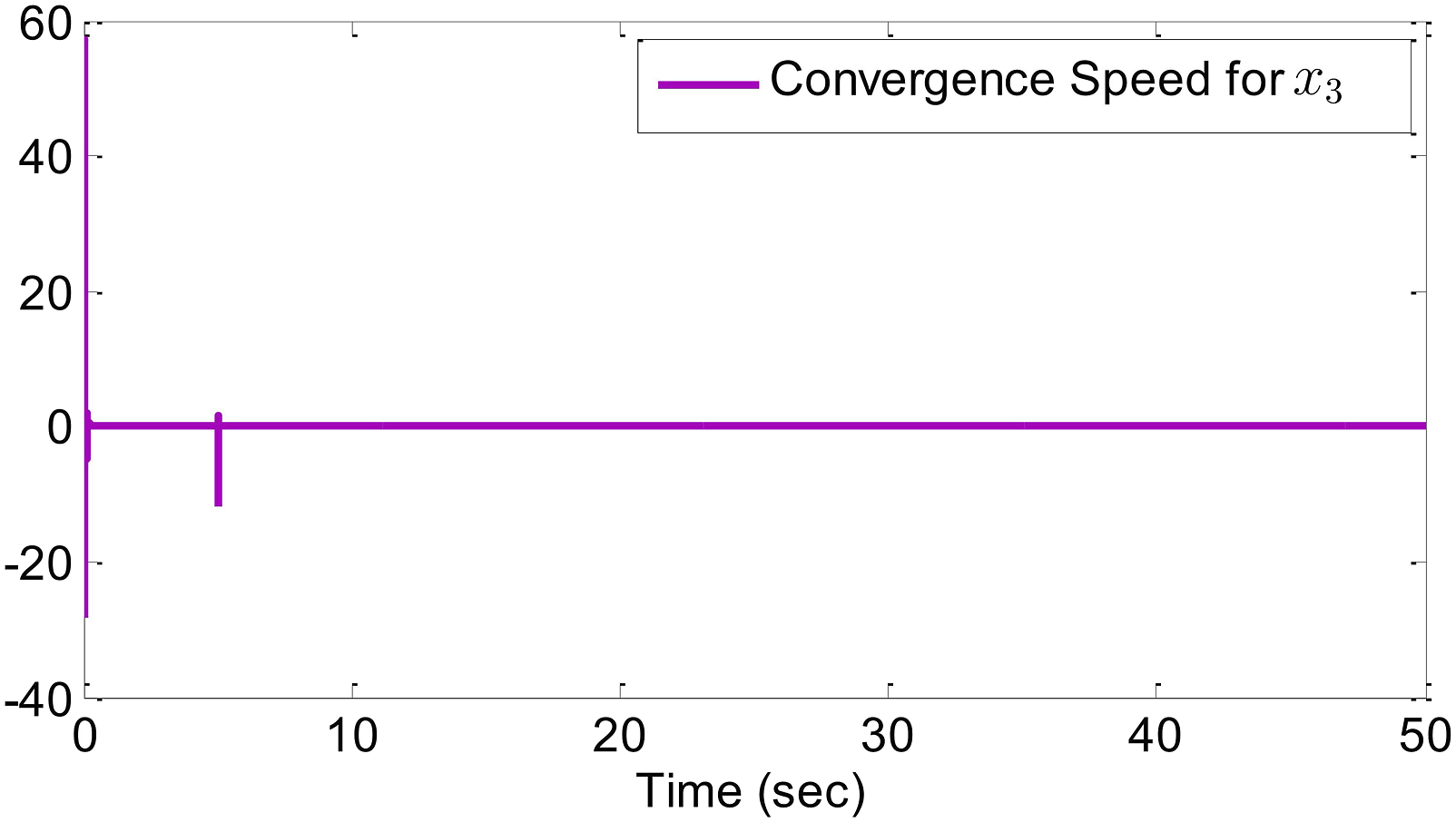
Convergence Speed for x3.
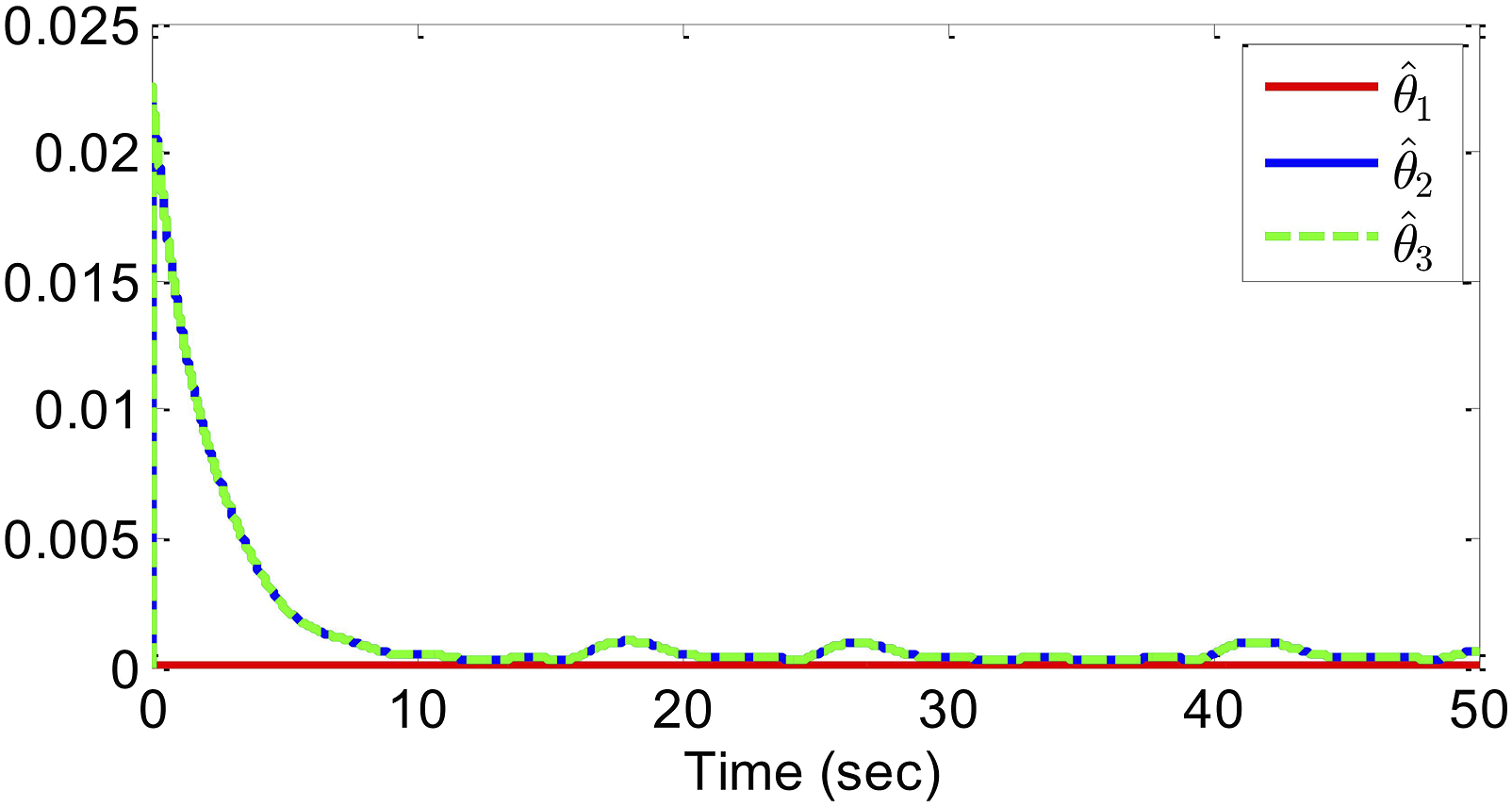
Adaptive laws
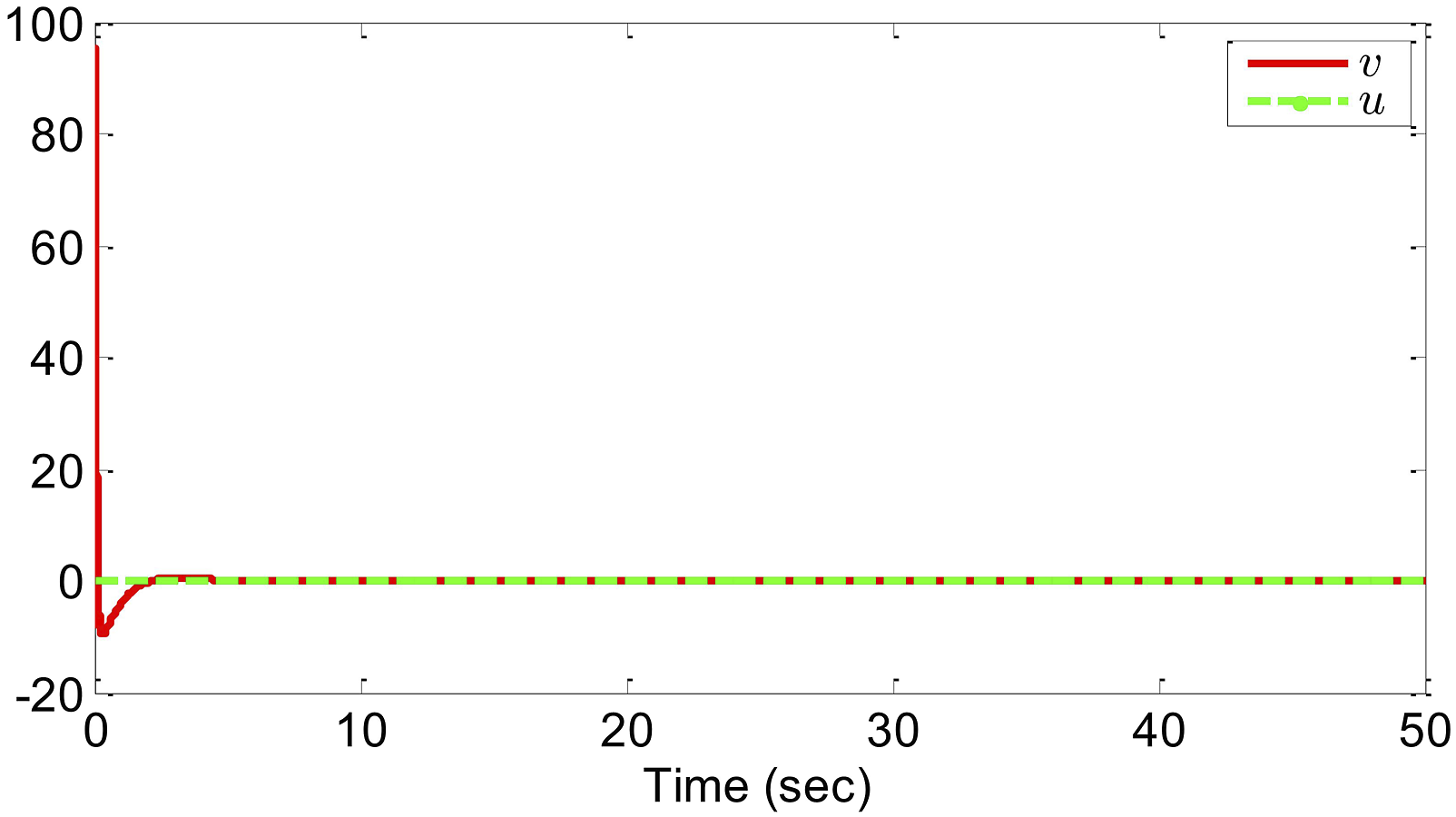
System input u and control input v.
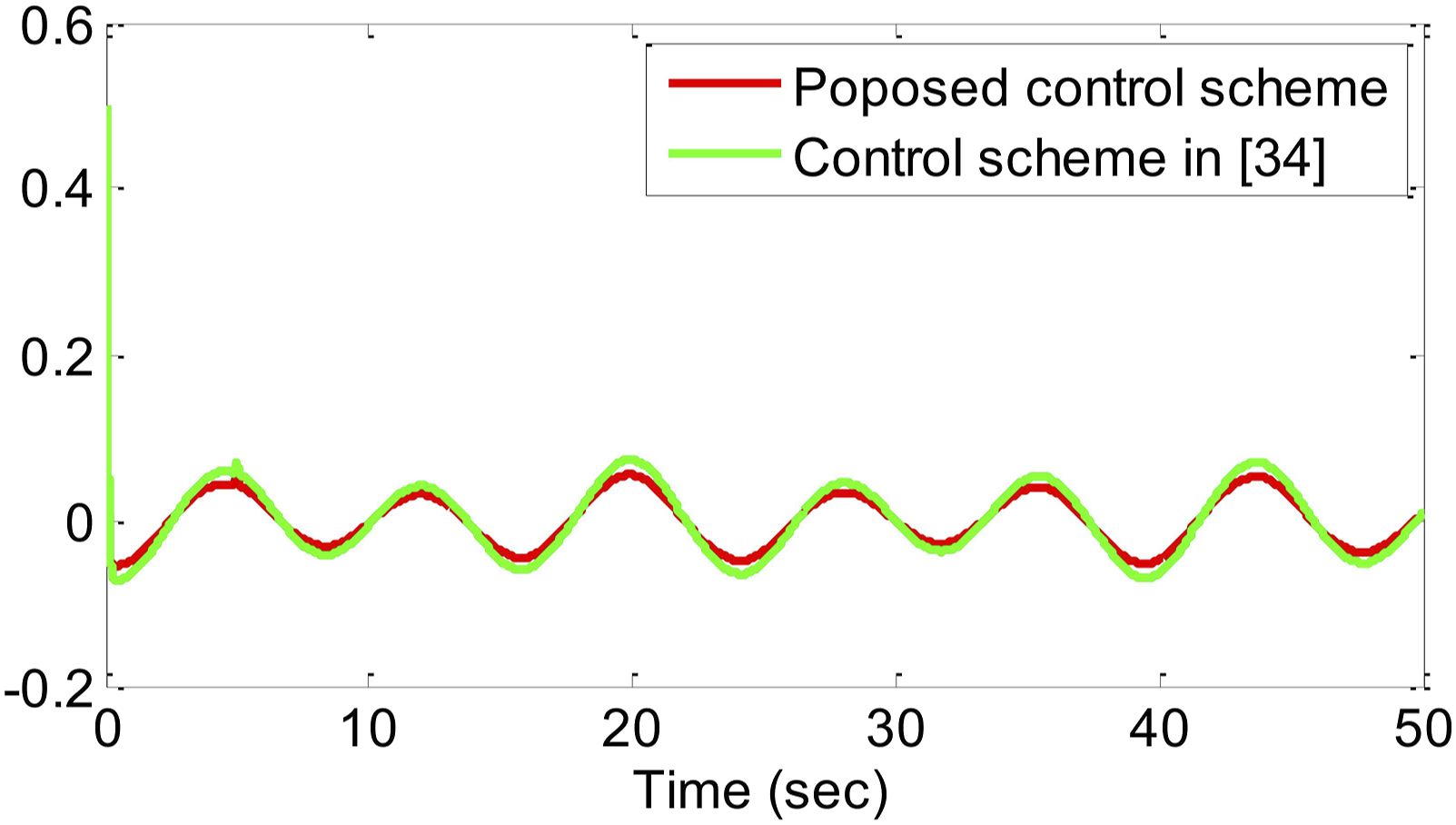
The trajectories of tracking error z1 under two methods.
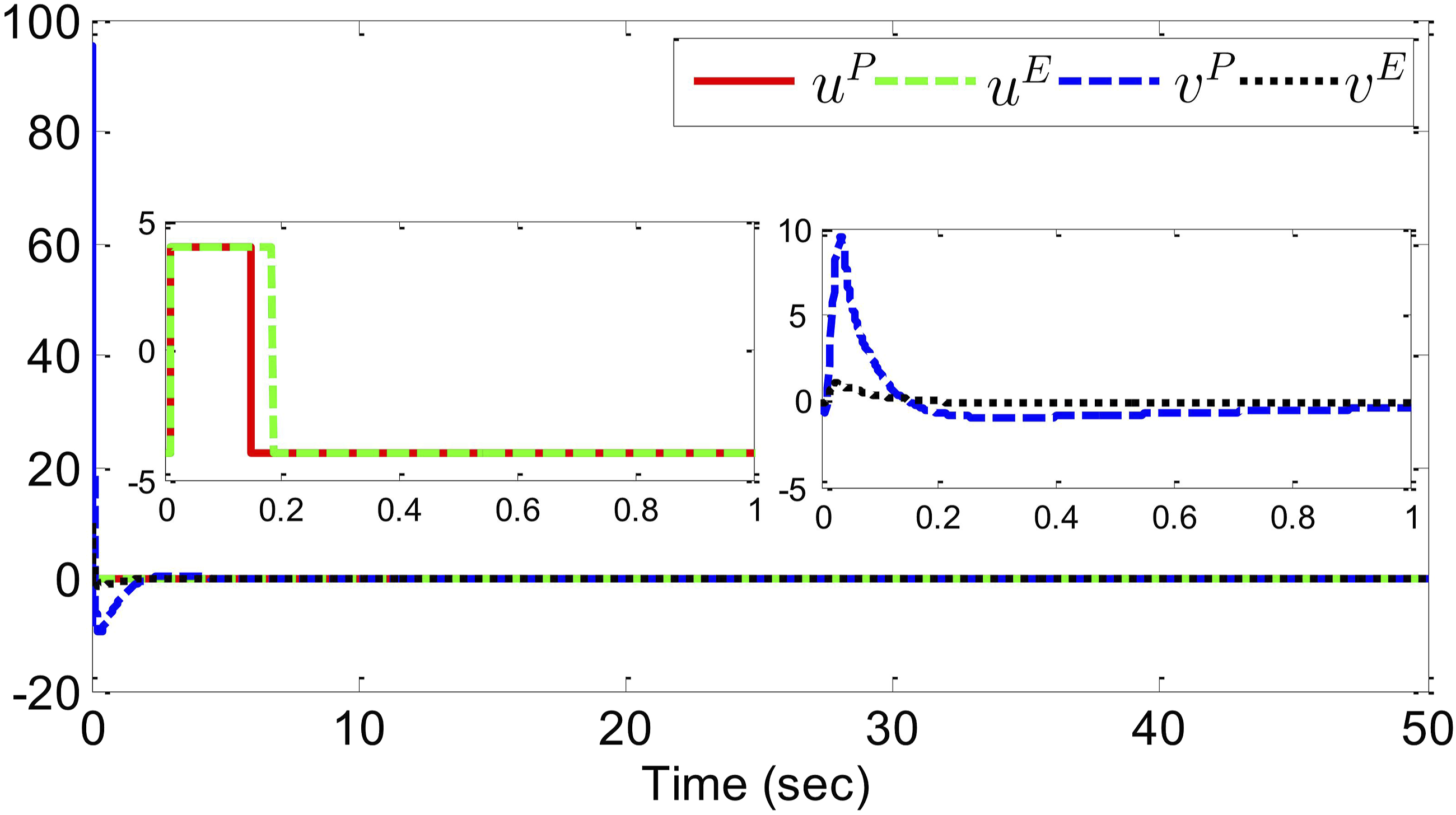
System input u P and u E and control input v P and v E under two methods.
While the proposed approach demonstrates significant advancements in integrating fixed-time control with input saturation and sensor faults, several difficulties and limitations must be acknowledged. One challenge is the selection of appropriate design parameters and initial conditions, which can be complex and often relies on trial-and-error methods due to the lack of systematic methods for parameter optimization. Additionally, singularity issues are a common concern in fixed-time control design. These issues can arise when the control strategy encounters situations where the control inputs or system responses become undefined or excessively large. To mitigate this, fixed-time control schemes typically incorporate piecewise continuous functions and command-filtered control techniques.
Conclusion
This paper proposes a fixed-time adaptive control approach for nonstrict-feedback nonlinear systems with input saturation and sensor faults. The method employs a smooth non-affine function to estimate saturation and RBFNN to approximate unknown nonlinearities. The designed adaptive FxTC, based on backstepping with the Lyapunov function and fixed-time theory, ensures boundedness within a predefined time, irrespective of initial conditions. The practicability of the proposed approach is verified through simulation studies, demonstrating its ability to handle input saturation and sensor faults in nonstrict-feedback nonlinear systems. Future work aims to extend this methodology to higher-order nonlinear systems with unmodeled dynamics and sensor faults, network constraints, actuator failures, and to address drift issues in adaptive laws.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Princess Nourah bint Abdulrahman University Researchers Supporting Project under grant number PNURSP2024R528, located in Riyadh, Saudi Arabia.