In this paper, the stability analysis of double Hopf bifurcation is carried out based on the time delay coupled active control system by using the related theory of bifurcation analysis. We got the stability switching region of the system with respect to time delay. The time delay and coupling strength are selected as the bifurcation parameters, then the normal form of the coupled time delay active control system is obtained by using the multi-scale method, and the dynamic behavior near the bifurcation point is obtained. So the parameter region of the stable periodic solution and the stable quasi-periodic solution are obtained. The analytical solution of the system is then solved by using the multi-frequency homotopy analysis method (MFHAM) to verify the existence of the unstable periodic solution. Finally, numerical simulation is executed to verify the theoretical results.
Many problems in the field of engineering can be expressed by nonlinear dynamic system,1–3 and bifurcation plays an important role in the system. Bifurcation will cause instability of the system, resulting in complex dynamics. And the vibration active control technology is a part of the engineering field and plays a vital role in the engineering structure. It is an effective method to reduce the structural vibration response to resist the earthquake. It has been used in various applications since the active control has been proposed, such as automotive vibration, vehicle noise control, structural control of buildings and bridges, particle board gluing process, and vibration control of thin film antenna spacecraft. In practice, it is mainly to study how to reduce the harmful vibration of the controlled object. Hysteresis occurs inevitably in the control process, so it is necessary to consider the time delay in the study. Due to the addition of time delay, the system generates more complex dynamics. It is more accurate to describe the actual situation. There are circumstances in reality that require consideration of not only time delay but also coupling factors, resulting in time-delay coupled systems, whose subsystems interact with each other to produce more complex dynamical behaviors, such as amplitude death, periodic motion, quasi-periodic motion, and chaos.
With the gradual maturity of the technology, more and more scholars have investigated the double Hopf bifurcation of dynamical system.4–6 In terms of the dynamics of active control, Peng et al.7 established an active control system with time delay and applied the center manifold method to obtain the dynamics near the codimension-one bifurcation point. Ding et al.8 analyzed the double Hopf bifurcation of active control system with time delay by multiple time scales. Thus, the dynamic behavior near the codimension-two bifurcation point is obtained. Sun et al.9 researched time delay active control system provides a reference for structural vibration control. In terms of time delay systems, the author in References10,11 analyzed stability and Hopf bifurcation of neural network systems. Yan et al.12 studied the Lotka–Volterra predator model, and properties of periodic solutions of the double Hopf bifurcation are discussed with the double time delay as the bifurcation parameter. Liu et al.13 performed a double Hopf bifurcation analysis of a diffuse predator model with strong Allee effects and double time delays using center manifold and normal formal theory. Ge et al.14 used an analytic method to study the double Hopf bifurcation of nonlinear differential equations with double time delays. Song et al.15 studied the dynamical classification near the double Hopf bifurcation point in a predator–prey system with Holling type II functional response. For coupled systems, more and more attention has been paid to the effect of time delay on the system. Qian et al.16 performed a double Hopf bifurcation analysis on a time delay coupled van der Pol system using the multi-scale method to obtain the dynamical behavior near the resonance point. Ge et al.17 performed a weakly resonant double Hopf analysis of an inertial four-neuron model using the perturbation-incremental scheme. Zhou et al.18 studied the double Hopf bifurcation for coupled van der Pol-Rayleigh system with time delay by normal form and center manifold theory.
The homotopy analysis method (HAM) is one of the analytic methods proposed by Liao19 in 1992, which is an effective method to study the analytic solutions of periodic solutions. You et al.20 applied HAM to the Duffing system with time delay displacement feedback to give the periodic solution of the system. Jafarian et al.21 solved a set of coupled Ramani equations modeled by nonlinear partial differential equations, and the results show that the HAM solution is in a good agreement with the exact solution, demonstrating the validity of the HAM. Zhou22 solved the non-vibration characteristics of the functional gradient fluid pipeline under generalized conditions using HAM, and a series of conclusions can be obtained based on the analysis of the expressions, which has important reference value for pipeline transportation. Song et al.23 obtained approximate solutions of the Duffing and van der Pol-Duffing oscillators by the residue regulating homotopy method, which has better convergence rate and performance stability. Li et al.24 studied the strongly nonlinear vibration of a cantilever beam system with concentrated mass by HAM. Li et al.25 obtained the explicit solutions to vertical and horizontal displacements of a cantilever beam by an improved homotopy analysis method. Li et al.26 obtained the numerical solution of nonlinear ordinary differential thermoelectric coupling equation by using HAM. Multi-frequency homotopy analysis method (MFHAM), as an improvement of the homotopy analysis method, is also an effective method to study the analytic solutions of periodic solutions. Zou et al.27 proposed an improved method of homotopy analysis method, that is, MFHAM, which is employed to analytically solve the free vibration solutions and the general solutions. Fu et al.28 obtained the periodic solutions of the coupled Duffing system by using MFHAM. Qiang et al.29 studied a two-degree-of-freedom coupled Duffing system with time delay by MFHAM. Now, we consider adding the coupling factor to the active control system with delayed feedback and study the role of time delay and coupling factors in the system. The stability switching of time delay coupled active control system is investigated, and the dynamic behavior near the double Hopf bifurcation point is discussed. Then the results show that the time delay and coupling factors can play important roles in the active control of vibration as long as the appropriate parameters are selected. We can choose appropriate parameters to keep system in a stable state and avoid harmful vibration. Therefore, the study of time delay coupled active control system is meaningful.
The structure of this paper is as follows: In section 2, the mathematical model of the time delay coupled active control system is introduced and the stability analysis of the system is carried out. In section 3, the normal form of the system at the double Hopf bifurcation point is obtained by using the multi-scale method and the double Hopf bifurcation analysis is given. In section 4, the steps of MFHAM are introduced. In section 5, the procedure for computing the time delay coupled active control system using MFHAM is described. In section 6, the numerical simulation verifies the theoretical analysis. Finally, the conclusion is given in section 7.
Stability analysis
Model
The single degree of freedom active control system with delayed feedback is described8; we focus on the study of the double Hopf bifurcation induced by time delay and coupling factor. So this paper is paid to the time delay coupled active control system, which is as follows:
where , , gu = u/k, , and β = a/k. For convenience, let t* = t, x1(t) and y1(t) are the displacements of the controlled system, m > 0 is the mass, c and k are damping and the stiffness, respectively, τ is the time delay, u v are feedback strengths, α is the coupling strength, and a is the external excitation factor.
Let and , then system (1) becomes as follows:
System (2) has equilibriums E0 = (0, 0, 0, 0), , , , and . The case of other equilibrium points can be transformed into the case of trivial equilibrium points by coordinate transformation, so here we only consider the stability of the system at trivial equilibrium points. The characteristic equation at zero is
In order to study the distribution of characteristic roots, we first introduce the following lemma,30 which will be used in proving theorems:
For transcendental equation
as (τ1, τ2, τ3, …, τm) change, the sum of orders of the zeros ofin the open right half plane can alter, and only a zero occurs on or passes through the imaginary axis.
Stability switches: Case one
When gu + 1 ≠ 0, λ = 0 is not the root of equation (3).
Consider
let iω(ω > 0) be a root of equation (4), then separating the real and imaginary parts yields
(i) When, then the trivial equilibrium of system (1) undergoes a Hopf bifurcation, and there exists n ∈ N, such that, when, E0is local asymptotic stable; when, E0is unstable.
(ii) When , then system (1) occurs double Hopf bifurcation, where ω± is given in equation (7) and is given in equation (10).Proof: Here we only prove (i), when τ = 0, equation (3) becomes
According to Routh–Hurwitz, when 4ζ + 2gv > 0, , (2ζ + gv)(gu + 1) > 0, hold, the roots of the above equation have all negative real parts. The trivial equilibrium is local asymptotic stable for any τ.
When , △ > 0, hold, h(z) has two positive roots, and , . Therefore, when , all the roots of equation (4) have negative real parts, and equation (4) has at least one root with positive real part when .
The proof is completed.
Stability switches: Case two
When gu + 1 ≠ 0, λ = 0 is not the root of equation (3).
Consider
let iω(ω > 0) be a root of equation (11),then separating the real and imaginary parts yields
(i) When, then the trivial equilibrium of system (1) undergoes a Hopf bifurcation, and there exists n ∈ N, such that, when, E0 is local asymptotic stable; when , E0is unstable.
(ii) When , then system (1) occurs double Hopf bifurcation, where ω± is given in equation (14) and is given in equation (17).Proof: The proof here is similar to that of the theorem 1, which is deleted here.
The normal form
In this section, we first derive the normal form of double Hopf bifurcation by multiple-scale method and then give a bifurcation analysis. We treat the coupling strength α and the time delay τ as two bifurcation parameters. Suppose that system (2) undergoes a double Hopf bifurcation from the trivial equilibrium at the critical point: α = αc and τ = τc. The solution of equation (2) is assumed to take the following form:
where xij = xij(T0, T2), T0 = t, T2 = ɛ2t, and 0 < ɛ ≪ 1.
We set perturbations as α = αc + ɛ2αɛ, τ = τc + ɛ2τɛ. To deal with the delayed terms of equation (2), we expand
where xijτ = xij(T0 − τc, T2), yijτ = yij(T0 − τc, T2), D0 = ∂/∂T0, and D2 = ∂/∂T2.
Then, substituting solution equation (19) into equation (2) and balancing the coefficients ɛ, ɛ2, and ɛ3, we can getɛ:
ɛ2:
ɛ3:
Suppose the solution of equation (20) can be expressed in the form of
where Aj, j = 1, 2 are complex constants with respect to T2.
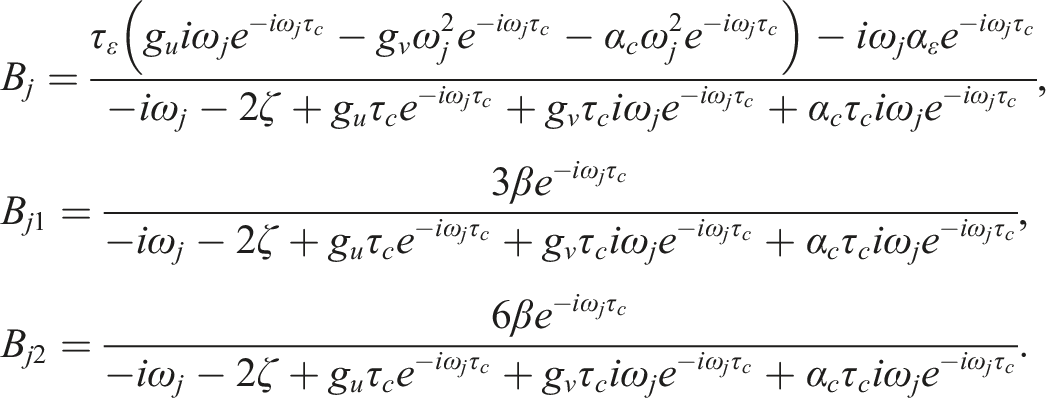
Substituting equation (23) into equation (21) and equation (22), eliminate the secular term to obtain the complex amplitude equation:
where the complex coefficients are expressed as follow:
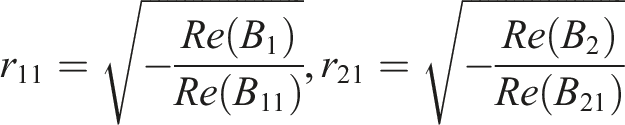
According to the normal form equations, we can obtain all possible equilibrium points
where
The existence and stability of the above possible equilibrium points is dependent on αɛ, τɛ. Here we consider the case of 3:5 resonance in the first case. Let gu = 0, , ζ = 0, β = 0.1, and , we obtain , , , and .
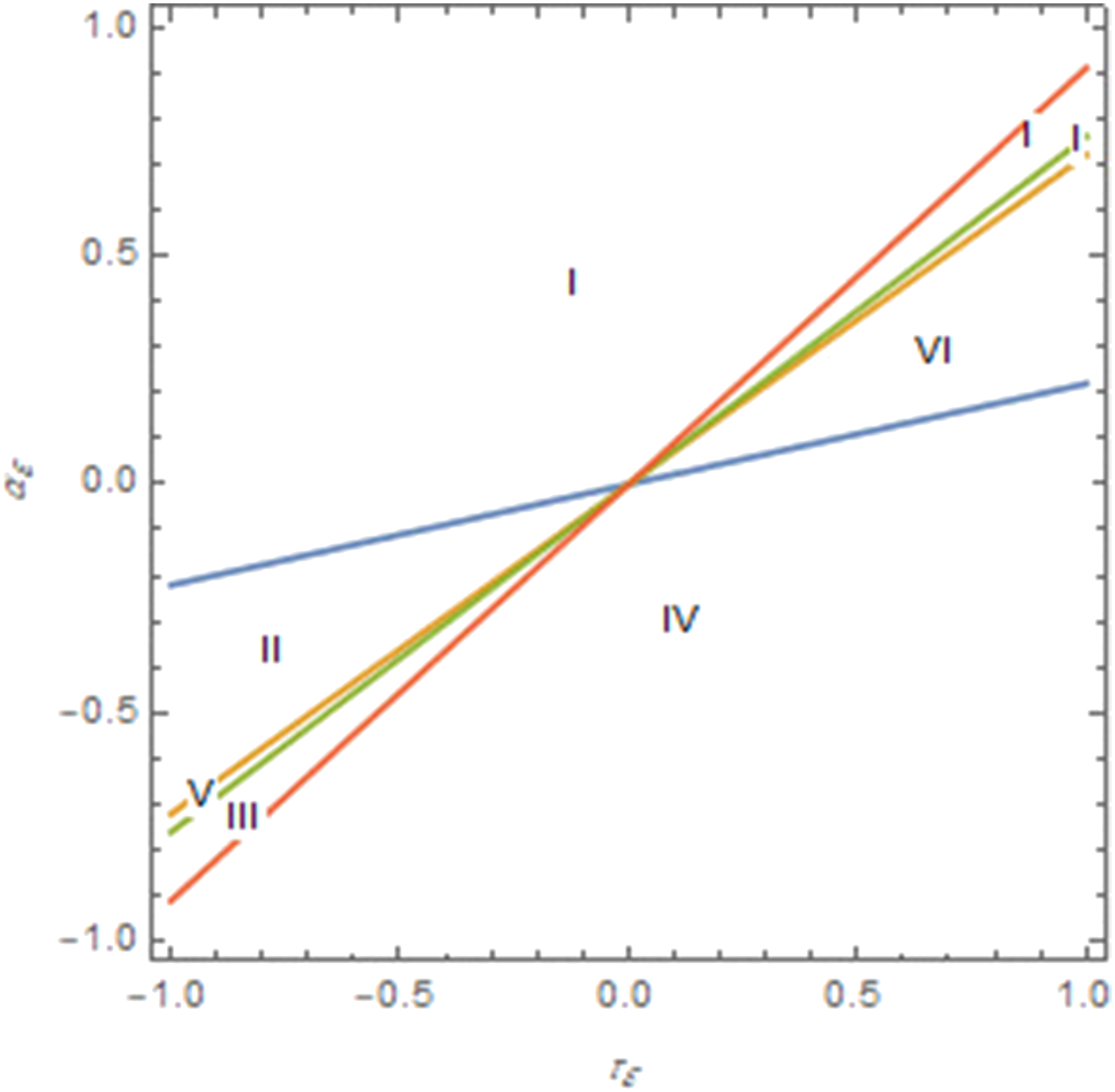
The critical bifurcation line can also be obtained as follows:
the critical bifurcation line divides the parameter region into six blocks as shown in Figure 1 and 2:
Critical bifurcation lines in the (αɛ, τɛ) parameter plane around the 3:5 weakly resonant double Hopf bifurcation point (αc, τc).
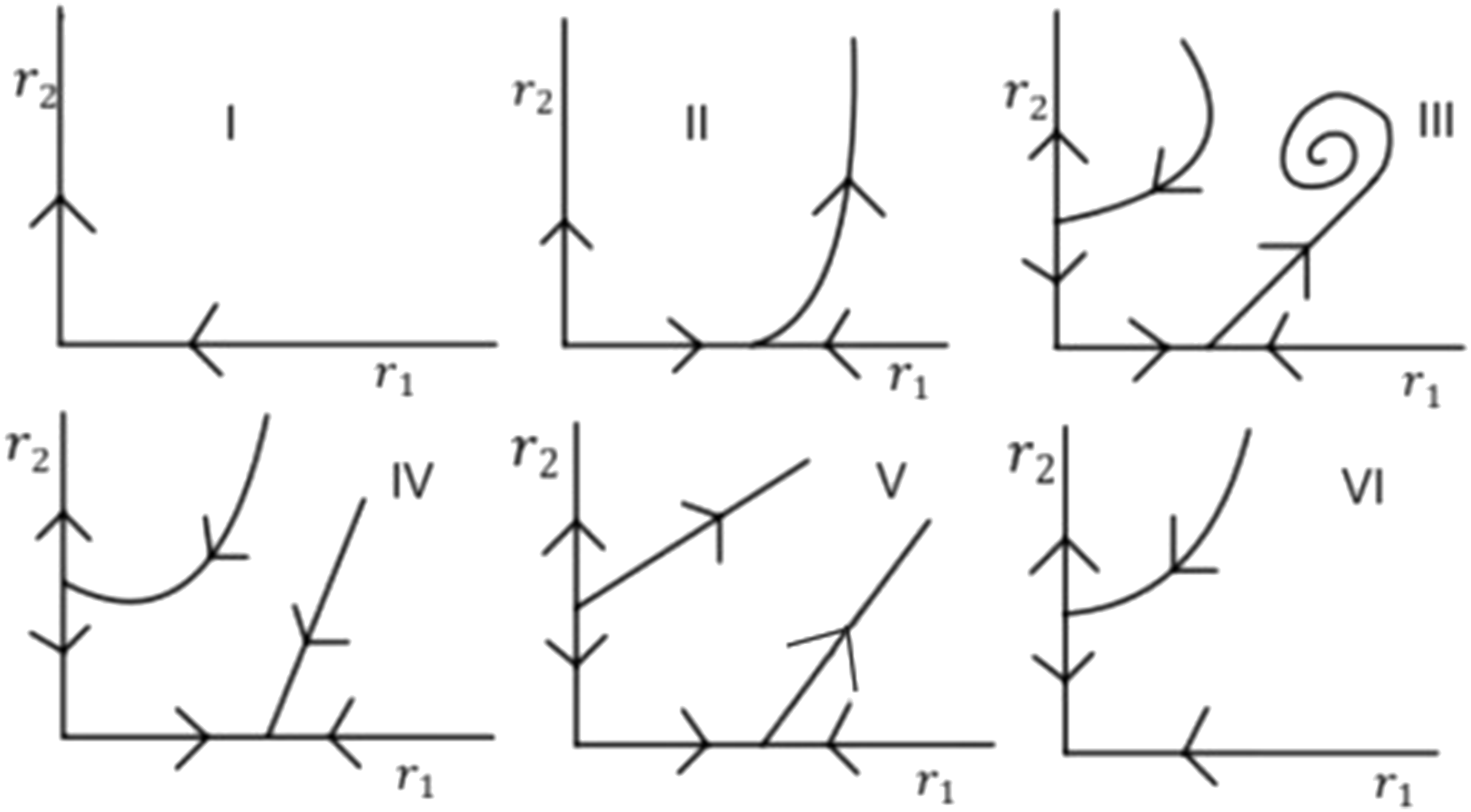
Classification of intrinsic dynamic behavior around the 3:5 weakly resonant double Hopf bifurcation point (αc, τc).
When the parameter is taken in region I, the amplitude equation has only one equilibrium point M0 = (0, 0), which is a saddle.
When the parameter is taken in region II, the amplitude equation has two equilibrium points M0 = (0, 0) and M1 = (r11, 0), and equilibrium point M0 is unstable while M1 is a saddle. Correspondingly, there exists an unstable periodic solution.
In region III, there are four equilibrium points: M0 = (0, 0), M1 = (r11, 0), M2 = (0, r21), and M3 = (r12, r22). The equilibrium point M0 becomes a saddle from an unstable equilibrium point, M1 becomes a saddle, M2 is a saddle, and M3 is stable. Correspondingly, the original system adds an unstable periodic motion and a stable quasiperiodic motion.
With (αɛ, τɛ) changing into region IV, the equilibrium point M3 disappears and there exist three equilibrium points, M0 = (0, 0), M1 = (r11, 0), and M2 = (0, r21), the equilibrium point M0 is a saddle and M1 becomes a stable point which is corresponded to a stable periodic motion of the original system, and the quasi-periodic motion of the original system disappears.
While (αɛ, τɛ) enters into region V, the amplitude equation has three equilibrium points: M0 = (0, 0), M1 = (r11, 0), M2 = (0, r21). The equilibrium points M0 and M1 are saddles, M2 is unstable, and M1 periodic motion of the original system changes stable to unstable.
When the parameter is taken in region VI, there exist two equilibrium points: M0 = (0, 0), M2 = (0, r21). The equilibrium point M0 is stable and M2 is a saddle, and the periodic solution of the corresponding original system vanishes.
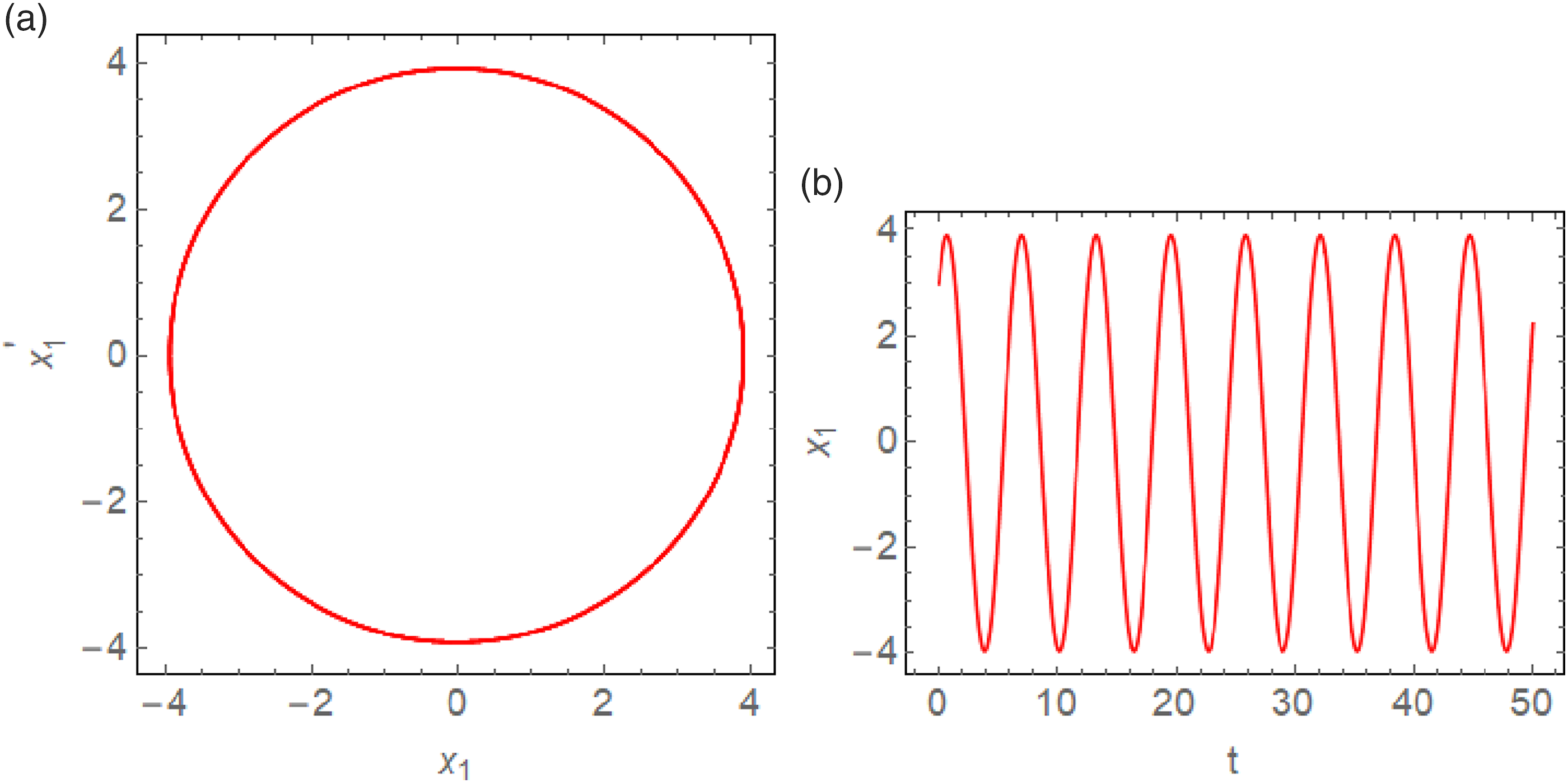
Based on the analysis above, taking the parameters falling in region IV, that is, α = −0.258 and τ = 100.08, the obtained phase portrait and time history are shown in Figure 3:
Period solution of the time delay coupled active control system when gu = 0, , ζ = 0, β = 0.1, α = −0.258, and τ = 100.08: (a) phase portrait and (b) time history.
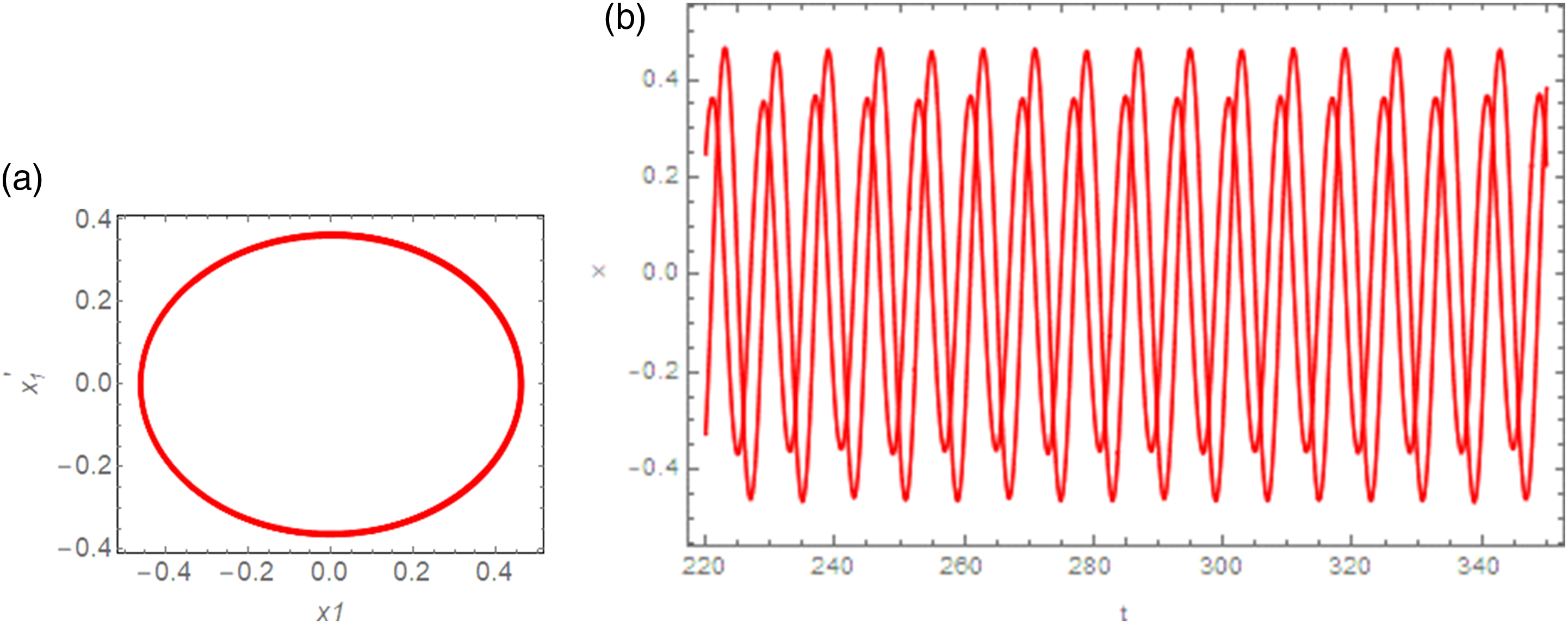
When the parameter falls in region III, that is,α = −0.2902 and τ = 6.043668, we obtain Figure 4:
Quasi period solution of the time delay coupled active control system when gu = 0, , ζ = 0, β = 0.1, α = −0.2902, and τ = 6.043668: (a) phase portrait and (b) time history.
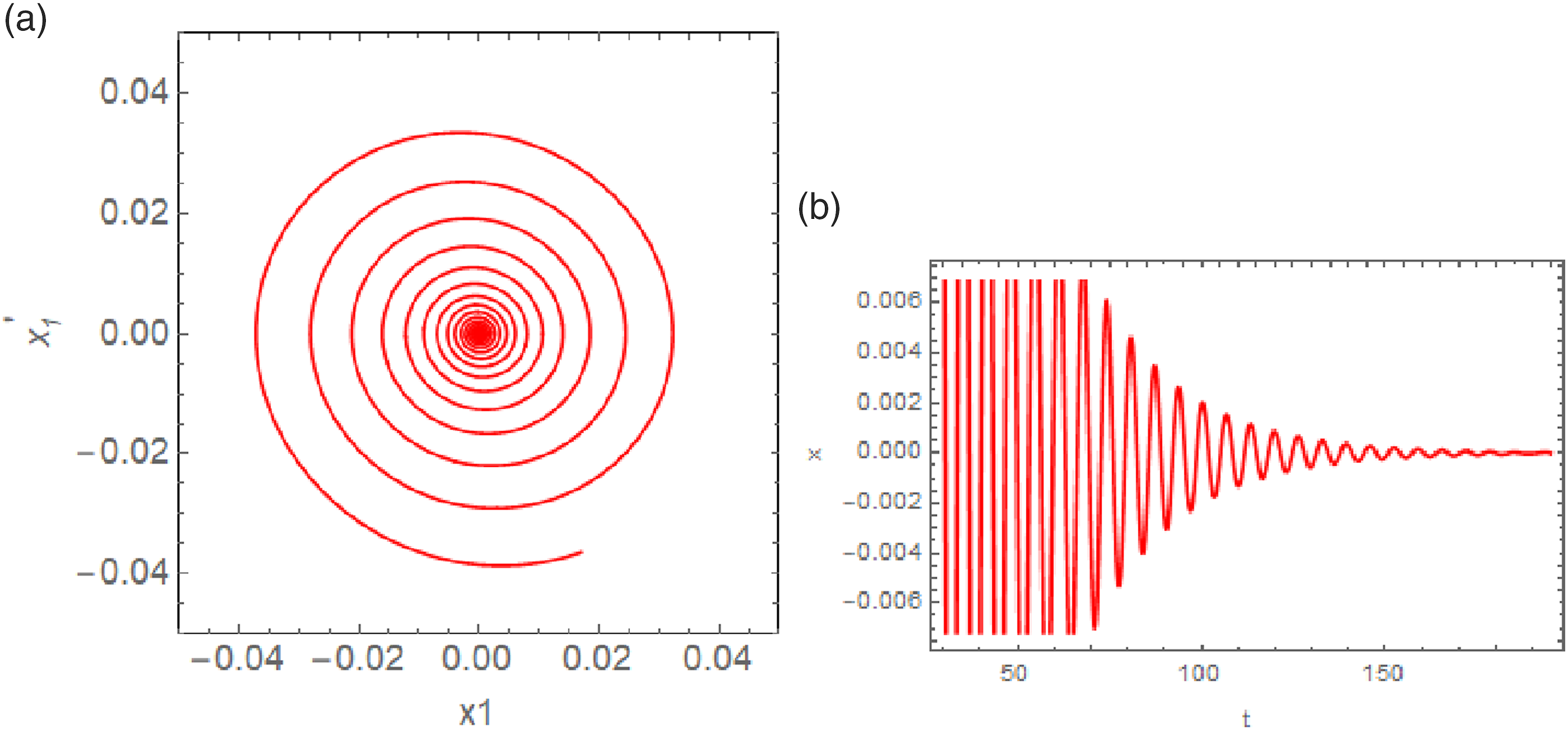
When the parameter is taken in region VI, that is, α = 0.85 and τ = 9.083668, we can obtain Figure 5:
Stable point of the time delay coupled active control system when gu = 0, , ζ = 0, β = 0.1, α = 0.85, and τ = 9.083668: (a) phase portrait and (b) time history.
From figures above, we can see that the results of the numerical simulation match our theoretical analysis.
Multi-frequency Homotopy Analysis Method
First, we consider the following two-degree-of-freedom system:
where x1(t) and x2(t) are unknown real functions, F1(x1, x2) and F2(x1, x2) are coupling functions, f1 and f2 are amplitudes of excitation, Ω is the frequency of the parametric excitation, and c is a known physical parameter.
According to the MFHAM, we construct the n-order auxiliary linear differential operator as follows:
where Ωi(i = 1, 2, …, n) are fundamental frequencies.
Because the considered frequencies multiplied by the imaginary unit i are roots of the characteristic polynomial in equation (29), any sinusoidal terms on the right-hand side of the differential operator Ln(x) with the considered frequencies will pose a secular term and hence need to be eliminated.
When the solutions of nonlinear equations are expected to contain the constant term, the auxiliary linear operator in equation (28) can be modified as follows.
We construct the following homotopy:
where q∈[0,1] is the embedding variable, gi,0(t)(i=1,2) are the initial solutions of xi(t)(i=1,2), respectively, and ℏ is the auxiliary parameter.
Assuming that the power series solution of equation (31) is
Substituting equation (32) into equation (31), and then eliminating the same term of q, we can get
where A0, Al, ϕl(l = 1, 2, 3, …, n) are constants.
Firstly, substituting equation (33) and equation (36) into equation (34), and eliminating the secular terms, we obtain . Secondly, substituting into equations (28) or (30), then xi(t)(i=1,2) can be obtained. Finally, we can get the value of A0, Al, ϕl(l = 1, 2, 3, …, n) by solving the equations consisting of secular terms.
In a similar way, xi,r(t)(i=1,2) can be determined one by one. Then the solution of equation (31) is
Analyzing the time delay coupled active control system with MFHAM
We consider the time delay coupled active control system by MFHAM
For a single period, the characteristic polynomial is
The corresponding auxiliary linear differential operator is
then, we construct the homotopy expression
where ℏ is the auxiliary parameter and q∈[0,1] is the embedding variable.
Substituting equation (41) into equation (40) and eliminating the same power terms of q, we can get
Assuming that solution to equation (42) can be expressed by
where a1, a2, bi, di, ϕi, γi(i = 1, 2, 3) are unknown parameters.
Substituting equation (42) and equation (44) into equation (43), we can get the following equations
To eliminate the secular terms in x1,1, y1,1, expand equation (45) and equation (46), we can obtain the equations as follows.
After eliminating the secular terms, we can get the expression of x1,1 and y1,1, where the parameters a1, a2, bi, di, ϕi, and γi (i = 1, 2, 3) can be calculated by equations. (47) to (60) and then the solution x1,1 and y1,1 can be obtained.
Thus, the first-order approximate solutions of x1 and y1 are, respectively
For the period-doubling solution, the characteristic polynomial is
The corresponding auxiliary linear differential operator is as follows:
next, we construct the homotopy expression
where ℏ is the auxiliary parameter and q∈[0,1] is the embedding variable.
Assuming that the solution of equation (1) can be expressed as
Substituting equation (65) into equation (64) and eliminating the same power terms of q, we can get
Assuming that the solution of equation (66) can be expressed by
where a1, a2, bi, di, ei, fi, ϕj, γj(i = 1, 2, 3)(j = 1, 2, 3, 4, 5) are unknown parameters.
Substituting equations (68) and (69) and (66) into (67), and eliminating the secular term in x1,1(t), y1,1(t), we can get some equations of a1, a2, bi, di, ei, fi, ϕj, γj(i = 1, 2, 3)(j = 1, 2, 3, 4, 5). After solving these equations, we can get the value of a1, a2, bi, di, ei, fi, ϕj, γj(i = 1, 2, 3)(j = 1, 2, 3, 4, 5). Then the double period solution can be obtained.
Numerical simulation
In this section, we get the approximate solution by using the MFHAM and compare it with the fourth-order Runge–Kutta method. According to the normal form section, when parameters are chosen in region II, system (1) has an unstable periodic solution. In regions III and V, system (1) has two unstable periodic motions. When (αε,τε) is located in region IV, system (1) has a stable periodic solution and an unstable periodic motion. For region VI, system (1) admits an unstable solution.
Set gu = 0, , ζ = 0, and β = 0.1, then when parameters fall in region II, α = −0.727489, τ = 5.083668, h = −1, and Ω = 0.6, we get unstable periodic solution of the system, which can be seen through the phase portrait and time history diagram in Figure 6.when parameters fall in region III, α = −1.092, τ = 5.083668, h = −1, and Ω = 0.9, we get the phase portrait and time history diagram of unstable periodic solution in Figure 7.when parameters fall in region IV, α = −0.258, τ = 100.08, h = −1, and Ω = 1.0, a stable periodic motion of system is obtained as shown in Figure 8. And through comparison of the approximate analytical solution and numerical solution, we can see the approximate solution is in a good agreement with the numerical solution.when parameters fall in region V, α = −0.9993, τ = 5.083668, h = −1, and Ω = 1.1, the approximate analytical solution of periodic motion is also obtained as shown in Figure 9.when parameters fall in region VI, α = −0.038, τ = 7.083668, h = −1, and Ω = 0.6, we get unstable limit cycle generated by the system in Figure 10.
Unstable period solution of the time delay coupled active control system, (a) the phase portrait MFHAM approximate solution and (b) the time history MFHAM approximate solution.
Unstable period solution of the time delay coupled active control system: (a) the phase portrait MFHAM approximate solution and (b) the time history MFHAM approximate solution.
Stable period solution of the time delay coupled active control system: (a) the phase portrait MFHAM approximate solution ——RK solution and (b) the time history MFHAM approximate solution ——RK solution.
Unstable period solution of the time delay coupled active control system: (a) the phase portrait MFHAM approximate solution and (b) the time history MFHAM approximate solution.
Unstable period solution of the time delay coupled active control system: (a) the phase portrait MFHAM approximate solution and (b) the time history MFHAM approximate solution.
Conclusion
This paper investigates the effect of time delay and coupling strength on the time delay coupled active control system. Here, we focus on the stability of the equilibrium point and the existence of the double Hopf bifurcation. Firstly, we used the characteristic equation to analyze the stability of the system and obtained the stability switching region of the system with respect to the delay. The results show that the time delay affected the stability of the equilibrium point. Secondly, in order to study the dynamics near the bifurcation point, we obtained the normal form of double Hopf bifurcation, from which the bifurcation analysis of the critical point is given. Based on the bifurcation analysis, the parameter region of the stable periodic solution and the stable quasi-periodic solution are obtained. It is concluded that the time delay is not negligible in the coupled active control system, and the change of the coupling strength also affects the dynamical behavior of the system. Finally, the periodic solutions of the system were solved by MFHAM to verify the existence of unstable periodic solutions. The results of this paper are useful for the study of the dynamics of time delay coupled systems.
Footnotes
Acknowledgments
The authors gratefully acknowledge the reviewers for their comments.
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: National Natural Science Foundation of China (NNSFC) through grant no. 12172333 and Natural Science Foundation of ZheJiang through grant no. LY20A020003.
ORCID iD
Youhua Qian
References
1.
YuYZhouWYChenZY. Two fast/slow decompositions as well as period-adding sequences in a generalized Bonhoeffer-van der Pol electronic circuit. AEU-Int J Electron C2022; 155: 154379.
2.
WangQQYuYZhangZD, et al.Melnikov-threshold-triggered mixed-mode oscillations in a family of amplitude-modulated forced oscillator. J Low Freq Noise V A2019; 38(2): 377–387.
3.
YuYZhangCChenZY, et al.Relaxation and mixed mode oscillations in a shape memory alloy oscillator driven by parametric and external excitations. Chaos Soliton Fract2020; 140: 110145.
4.
YuP. Analysis on double Hopf bifurcation using computer Algebra with the Aid of multiple scales. Nonlinear Dyn2002; 27(1): 19–53.
5.
MaSQLuQSFengZS. Double Hopf bifurcation for van der Pol-Duffing oscillator with parametric delay feedback control. J Math Anal Appl2008; 338(2): 993–1007.
6.
ItovichGRMoiolaJL. Double Hopf bifurcation analysis using frequency domain methods. Nonlinear Dyn2015; 39(3): 235–258.
7.
PengJWangLHZhaoYY, et al.Bifurcation analysis in active control system with time delay feedback. Appl Math Comput2013; 219(19): 10073–10081.
8.
DingYTCaoJJiangWH. Double Hopf bifurcation in active control system with delayed feedback: application to glue dosing processes for particleboard. Nonlinear Dyn2016; 83(3): 1567–1576.
9.
SunXTXuJJingXJ, et al.Beneficial performance of a quasi-zero-stiffness vibration isolator with time-delayed active control. Int J Mech Sci2014; 82: 32–40.
10.
XingRTXiaoMZhangYZ, et al.Stability and Hopf bifurcation analysis of an (n+ m)-neuron double-ring neural network model with multiple time delays. J Syst Sci Complex2022; 35(1): 159–178.
11.
GeJHXuJ. Stability and Hopf bifurcation on four-neuron neural networks with inertia and multiple delays. Neurocomputing2018; 287: 34–44.
12.
YanXPChuYD. Stability and bifurcation analysis for a delayed LotkaCVolterra predatorCprey system. J Comput Appl Math2006; 196(1): 198–210.
13.
LiuYYWeiJJ. Double Hopf bifurcation of a diffusive predatorCprey system with strong Allee effect and two delays. Nonlinear Anal-Model2021; 26(1): 72–92.
14.
GeJHXuJ. An analytical method for studying double Hopf bifurcations induced by two delays in nonlinear differential systems. Sci China Tech Sci2020; 63(4): 597–602.
15.
SongYLPengYHZhangTH. Double Hopf bifurcation analysis in the memory-based diffusion system. J Dyn Differ Equ2022: 1–42.
16.
QianYHFuHXGuoJM. Weakly resonant double Hopf bifurcation in coupled nonlinear systems with delayed freedback and application of homotopy analysis method. J Low Freq Noise V A2019; 38(3-4): 1651–1675.
17.
GeJHXuJ. Weak resonant double Hopf bifurcations in an inertial four-neuron model with time delay. Int J Neural Syst2012; 22(01): 63–75.
18.
ZhouHQianYH. Double Hopf bifurcation analysis for coupled van der Pol-Rayleigh system with time delay. J Vib Eng Technol2023, Online ahead of print. DOI: 10.1007/s42417-023-01238-3.
19.
LiaoSJ. The proposed homotopy analysis technique for the solution of nonlinear problems. Shanghai Jiao Tong University Shanghai, 1992.
20.
YouXCXuH. Analytical approximations for the periodic motion of the Duffing system with delayed feedback. Numer Algorithms2011; 56(4): 561–576.
21.
JafarianAGhaderiPGolmankhanehAK, et al.Homotopy analysis method for solving coupled Ramani equations. Rom J Phys2014; 59(1-2): 26–35.
22.
ZhouJChangXPLiYH. Nonlinear vibration analysis of functionally graded flow pipelines under generalized boundary conditions based on homotopy analysis. Acta Mech2022; 233(12): 5447C5463.
LiJXYanYWangWQ. Time-delay feedback control of a cantilever beam with concentrated mass based on the homotopy analysis method. Appl Math Model2022; 108: 629–645.
25.
LiYSLiXYXieC, et al.Explicit solution to large deformation of cantilever beam by improved homotopy analysis method II: vertical and horizontal displacements. Appl Sci2022; 12(5): 2513.
26.
LiHYuJZhuHJ. Power series approximation solution to thermoelectric generator temperature field by homotopy analysis method. J Electron Mater2023; 52(3): 1–9.
27.
ZouKGNagarajaiahS. The solution structure of the Dffing oscillators transient response and general solution. Nonlinear Dyn2015; 81: 621–639.
28.
FuHXQianYH. Study on a multi-frequency homotopy analysis method for period-doubling solutions of nonlinear systems. Int J Bifurcat Chaos2018; 28(04): 1850049.
29.
QiangYQianYHGuoXY. Periodic solutions of delay nonlinear system by multi-frequency homotopy analysis method. J Low Freq Noise V A2019; 38(3-4): 1439–1454.
30.
PengMZhangZDQuZF, et al.Qualitative analysis in a delayed Van der Pol oscillator. Phys A2020; 544: 123482.


































































 MFHAM approximate solution.
MFHAM approximate solution.