
Abstract
An exact analytical solution for the frequency response of a system consisting of a mass grounded by linear and nonlinear springs in series was derived. The system is applicable in the study of beams carrying intermediate rigid mass. The exact solution was derived by naturally transforming the integral of the governing nonlinear ODE into a form that can be expressed in terms of elliptic integrals. Hence, the exact frequency–amplitude solution was derived in terms of the complete elliptic integral of the first and third kinds. Periodic solutions were found to exist for all real values of
Keywords
Introduction
Nonlinear vibration is a subject of immense scientific and engineering importance. Many physical phenomena such as chaos, 1 bifurcations,2,3 jumps, 4 sub-harmonic resonance, 5 softening and hardening backbone response,5,6 parametric response, 7 stability analysis,3,5 and fractal oscillations8–10 can only be understood through nonlinear vibration analysis. The nonlinearity in a vibrating system may arise from static and/or dynamic inertia effects, damping, size-dependent mechanics, fractal mechanics, elastic or spring stiffness, and external excitation. Of these, the most common source of nonlinearity encountered in vibrating systems is the elastic or spring stiffness. The governing model of a nonlinear vibrating system always manifests itself in the form of nonlinear PDEs and ODEs. The latter are exactly solvable only in a few cases. For most cases, approximate analytical or numerical solutions are normally employed. Many approximate analytical methods have been developed11–16 and are capable of providing physical insight into the response of a nonlinear vibrating system.
Springs or elastic members are an integral part of machines and in some cases a combination of these are required to design machine components. The spring combination can be in series and/or parallel connection. The vibration analysis of a rigid component attached to a number of springs is easier if an equivalent spring can be determined for the spring combination. In the case of linear springs, the exact equivalent spring is simply determined from Newton's third law as can be seen from any introductory vibration textbook, for example, ‘Mechanical Vibrations’ by Rao. 17 However, in some real life applications one or more springs in the combination are nonlinear and cannot be approximated by a linear spring if an accurate analysis of system’s dynamic response is required. Sanmiguel-Rojas et al 18 applied the equivalent rigidity method to investigate the free nonlinear vibration of a mass connected to two cubic nonlinear springs in parallel and series. They obtained an approximate solution of the equivalent spring stiffness for both parallel and series connections. They generalized the solution of the parallel connection for any degree of polynomial nonlinearity but could not generalize the solution of the series connection, which was more complicated. In a recent study, 19 the principle of Newton’s third law was extended to determine the exact equivalent spring for the series connection of two nonlinear springs with any degree of polynomial nonlinearity. The analysis works for two nonlinear springs with the same linear and nonlinear polynomial terms but different coefficients (i.e. stiffness constants). The solution breaks down when the two springs have different number of polynomial terms. Therefore, the general problem of finding the exact equivalent spring for the series connection of any two nonlinear springs with polynomial-type nonlinearities is still unsolved. The implication is that in many cases, a rigid mass attached to two nonlinear springs connected in series cannot be simplified to a system with an exact equivalent spring (at least for now).
A fundamental vibrating system with a simple spring configuration but without an exact equivalent spring is that of a rigid mass attached to a linear and a nonlinear spring connected in series (see Figure 1). This system can be used to study the vibration of a cantilever beam carrying an intermediate lumped mass.
20
Bayat et al
21
applied an averaging method to derive an approximate equivalent spring that was applied to study the free vibration of the system in Figure 1. However, an exact analysis of the system in Figure 1 would require developing the vibration model in terms of the motion of the connection point of the springs and the motion of the mass.
22
This gives rise to differential-algebraic equations that can be reduced to a strong nonlinear single degree-of-freedom motion describing the relative displacement of the connection point and the mass. Then, the motions of the mass ( Schematic of a mass attached to linear and nonlinear springs connected in series.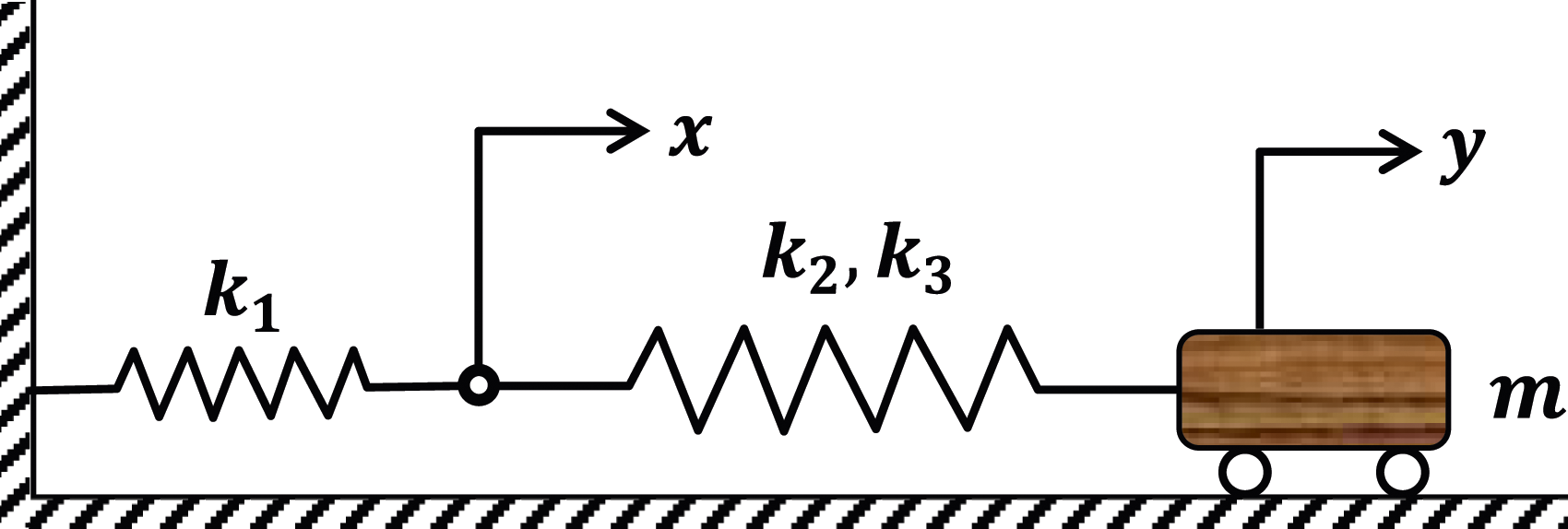
Perhaps, the first analytical study of Figure 1 was conducted by Telli and Kopmaz. 22 They obtained two approximate solutions using a sixth-order harmonic balance method and a modified Lindstedt–Poincare method. Their analysis showed that the approximate analytical solutions were only accurate for a limited range of inputs, mostly those that gave rise to a weakly nonlinear response. This is not surprising because they employed asymptotic expansion methods which have been shown to be generally inaccurate for strong nonlinear responses. 23 Lai and Lim 24 improved the classical harmonic balance method in Ref. 22 by applying a linearization to the nonlinear ODE. The improved method called linearized harmonic balance method was used to obtain high-order approximations of the solution that were shown to be algebraically simpler than its classical counterpart. Third-order approximations of the linearized harmonic balance method were derived and shown to predict weakly and strongly nonlinear responses with reasonable accuracy. Bayat et al 21 provided an approximate analytical solution to the free vibration of the system in Figure 1 using the Hamiltonian approach. They also derived an equivalent stiffness for the system that gave the same periodic solution as the Hamiltonian approach. The main drawback to the Hamiltonian approach is that it is based on the assumption of a purely harmonic solution and therefore, it is not able to predict the anharmonic response of the relative motion as found in Figures 8 and 11 of Ref. 22. However, it was shown that the Hamiltonian approach could provide accurate solutions for inputs resulting in weakly nonlinear response of the system. A more accurate approximate solution capable of predicting the strong nonlinear response of the system was provided in Ref. 20. The approximate solution was based on a homotopy Pade technique, which is a combination of the homotopy analysis method and the Pade approximation technique. Whereas the results of the homotopy Pade technique were generally found to be in very good agreement with corresponding results of the numerical solution, the process of deriving the solution is complex and would require symbolic computational packages to aid the algebraic manipulation.
In other studies on the free vibration of a mass grounded by linear and nonlinear springs in series, qualitative analysis was conducted. Big-Alabo 25 developed phase portraits and demonstrated the presence of strong nonlinear vibrations around the origin. Furthermore, an equation that can be used to perform a detailed qualitative analysis was derived and very accurate periodic solutions were provided using the continuous piecewise linearization method. A more comprehensive qualitative analysis was presented by Sun and Wu. 26 They demonstrated the existence of various centres of vibration and established some conditions for the existence of periodic solutions. They further demonstrated the existence of asymmetric vibrations in the system, but their analysis did not consider the conditions under which weak or strong nonlinear vibrations can occur. They also derived an approximate periodic solution based on the Newton harmonic balance method, but they did not investigate the accuracy of the method using numerical examples.
The approximate studies that have been conducted on the vibration of the mass grounded by linear and nonlinear springs in series highlight the importance and complex nature of the system. The approximate studies18,20–22,24–26 are applicable only for a limited set of inputs, with the possible exception of Ref. 25, and the accuracy of the approximate analytical solutions was verified using numerical solutions because an exact analytical solution has not been derived yet. Furthermore, the conditions for which periodic solutions exist and the general conditions under which weak and strong nonlinear vibrations can occur have not been fully investigated. In this paper, the exact frequency–amplitude response for the free vibration of a mass grounded by linear and nonlinear springs in series was derived from the first integral of the differential equation in terms of the complete elliptic integral of the first and third kinds. Although the complete elliptic integrals are special functions which do not have exact analytical solutions, they can be evaluated to very high accuracy using efficient numerical algorithms found in software packages such as MATLAB and Mathematica. In this study, the EllipticK and EllipticPi functions in Mathematica were used to evaluate the elliptic integral of the first and third kinds to machine epsilon precision. Hence, deriving the exact solution in terms of elliptic integral posed no computational challenge. The derived exact solution enabled the determination of some conditions for which periodic solutions can be obtained. Likewise, some general conditions under which weak and strong nonlinear vibrations occur were established. Furthermore, qualitative analysis was conducted using phase plots and an approximate frequency–amplitude formula was derived.
Nonlinear vibration model
The vibration system consists of a mass (

The variational principle for a conservative system of the form




Hence, substituting equation (3a) in (3b) gives the following:

Note that equation (4) can be derived also by considering the balance of forces. Equations (1) and (4) are a pair of differential-algebraic equations that can be solved simultaneously using numerical methods. Alternatively, we can reduce the differential-algebraic equations to a single degree-of-freedom in terms of the relative motion as follows. First, equation (1) can be written as follows:




Exact analytical solution
Derivation of the exact frequency–amplitude response
For a nonlinear oscillator of the form:



Considering the first quarter of the vibration cycle (the velocity is negative) gives:


The main goal of the present article is to derive the exact analytical solution to equation (13).
The integral for the exact period contains the square root of a rational polynomial function. In order to derive the exact period, equation (13) has to be transformed into a standard definite integral that is expressible in terms of a complete elliptic integral solution. Hence, by algebraic simplification we have:


The discriminant of the quadratic expression in the square root of equation (15) is negative (since

Hence, putting equation (16) in (15) gives:


The left-hand side of equation (18) shows that




Comparing the first integral in equation (17) with equation (20), we get
Therefore,

Next, we treat the second integral in equation (17) by substituting

Comparing the second integral in equation (17) with equation (24),

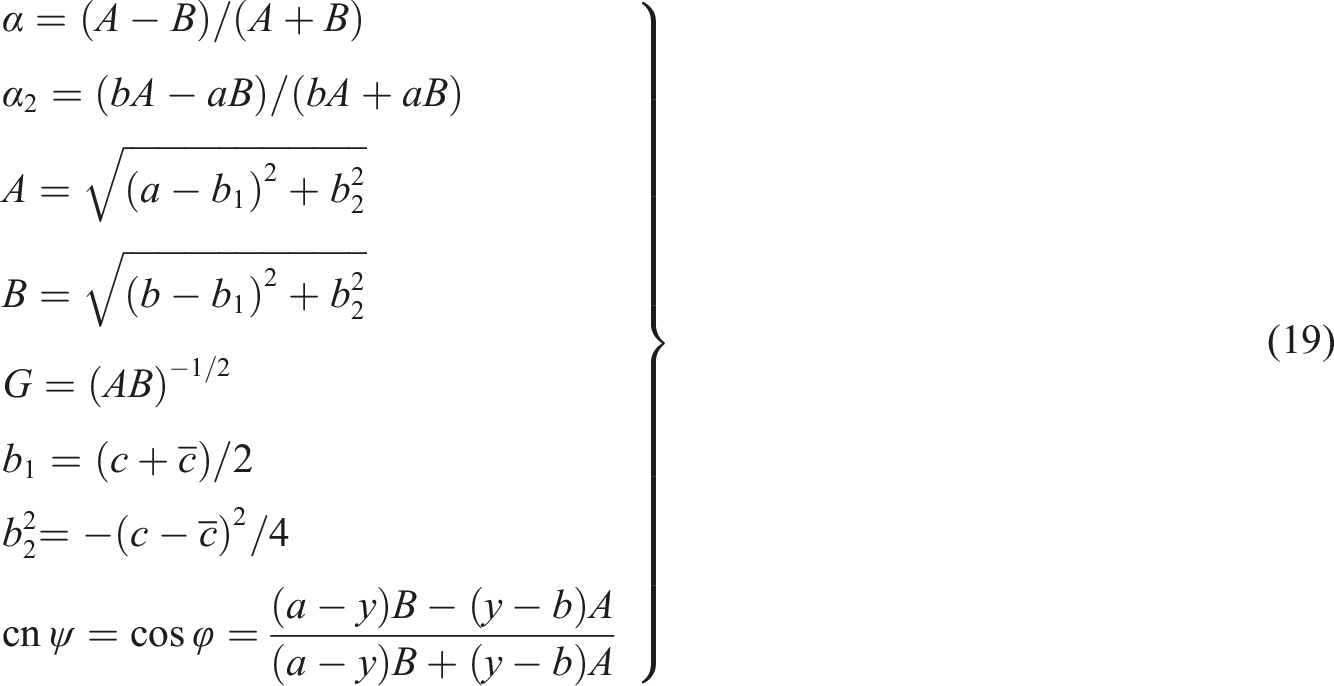
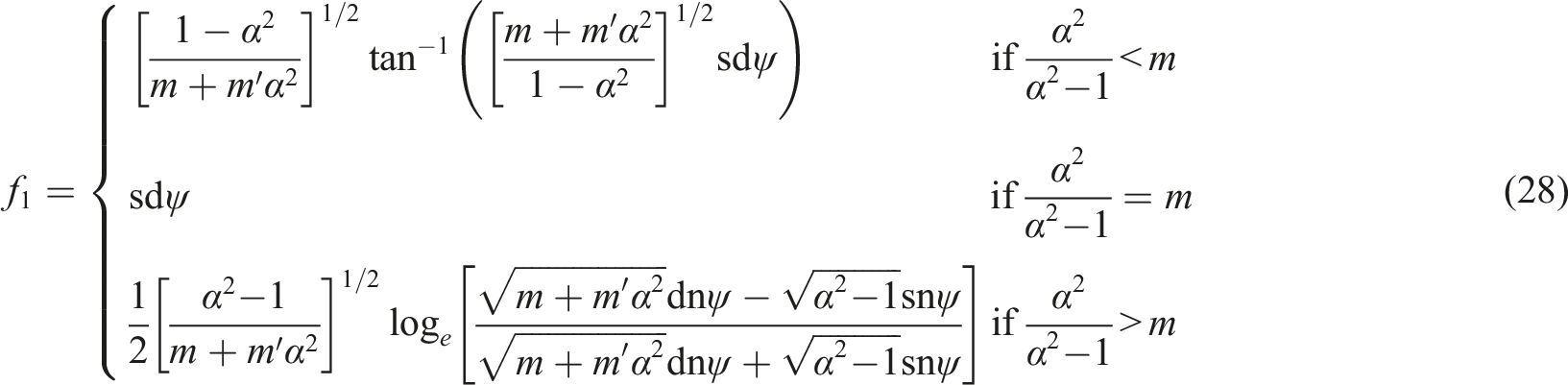
The integral in equation (25) can be evaluated based on formula 341.03 on page 206 of Ref 27 as follows:



Using the identities


Then, from equations (17), (23), and (31) the exact period was derived as follows:






Hence, the exact frequency–amplitude solution for the periodic response can be expressed as follows:

It should be noted that equation (38) gives the exact non-dimensional frequency, that is, exact frequency divided by the constant
Conditions for periodic solutions
Having derived the exact frequency–amplitude solution in a closed-form, we now investigate the conditions under which periodic solutions exist. The square root in the numerator of equation (38) suggests that real periodic solutions exist for this system for positive and negative values of
Approximate analytical solution for the frequency–amplitude response
Many approximate methods exist for deriving the frequency–amplitude response of nonlinear conservative oscillators. In this section, the frequency–amplitude formulation (FAF) by He 28 has been applied. This approach provides a very fast means of obtaining the frequency–amplitude solution and produces the same results with many other established approximate analytical methods such as Hamiltonian approach and homotopy perturbation method. Since its formulation, a number of improvements have been proposed by several authors.29–34 The improvements are normally carried out on the residual function, 35 averaging technique for error minimization,32,35 initial trial functions,30,33,34 and/or the form of the expression for the FAF. 31 Here, we apply the classical approach of the FAF with weighted-average residuals 28 to get a fast approximation of the frequency–amplitude solution to equation (8).
Since equation (8) is in a non-dimensional form, we assume two initial trial solutions of the form:





Substituting equations (42) and (39) in (41a), (41b) we get:



Equation (44) is the same result derived if we solve equation (8) using the Hamiltonian approach. 21
In contrast to the conditions for periodic oscillations deduced from the exact solution, equation (44) implies the possibility of periodic solutions for
Results and discussions
Exact frequency–amplitude response
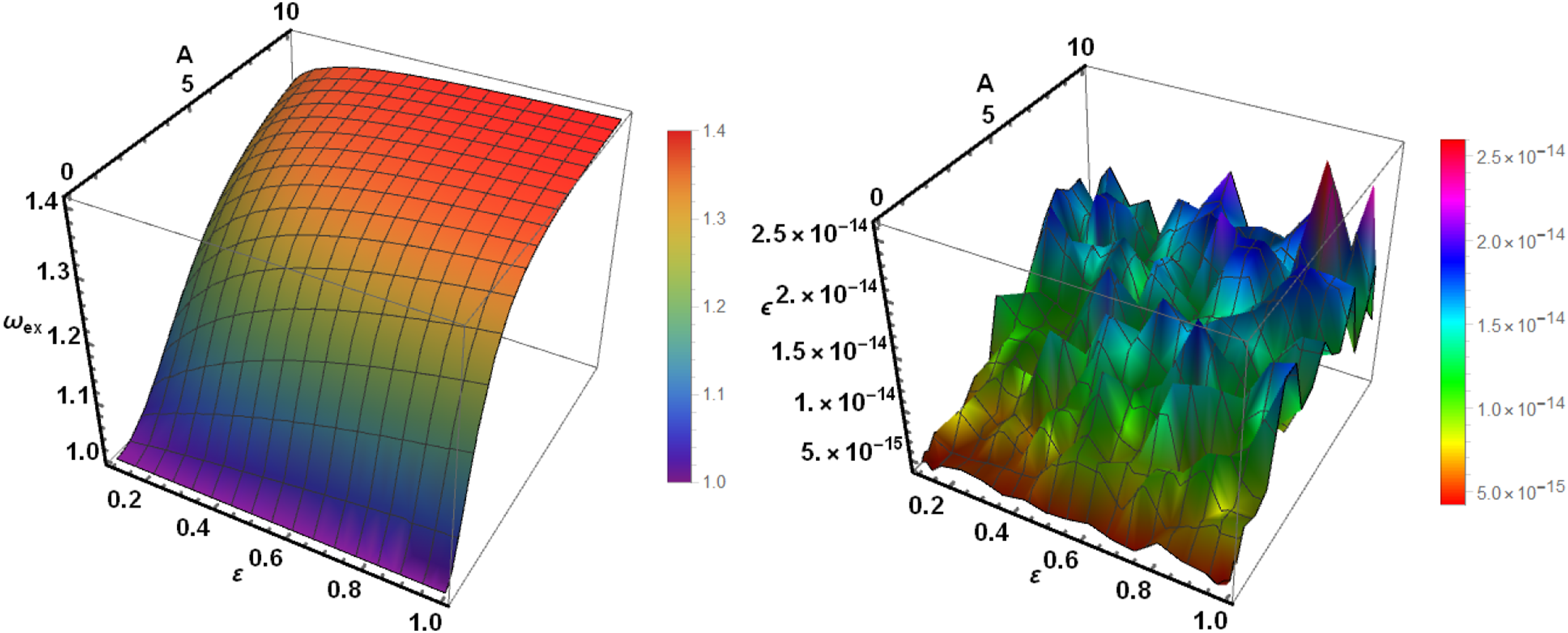
The complete elliptic integrals of the first and third kind can be evaluated to machine precision using the EllipticK and EllipticPi functions in Mathematica™, respectively. Hence, equation (38) was simulated using these Mathematica™ functions to demonstrate the effect of the system parameters (
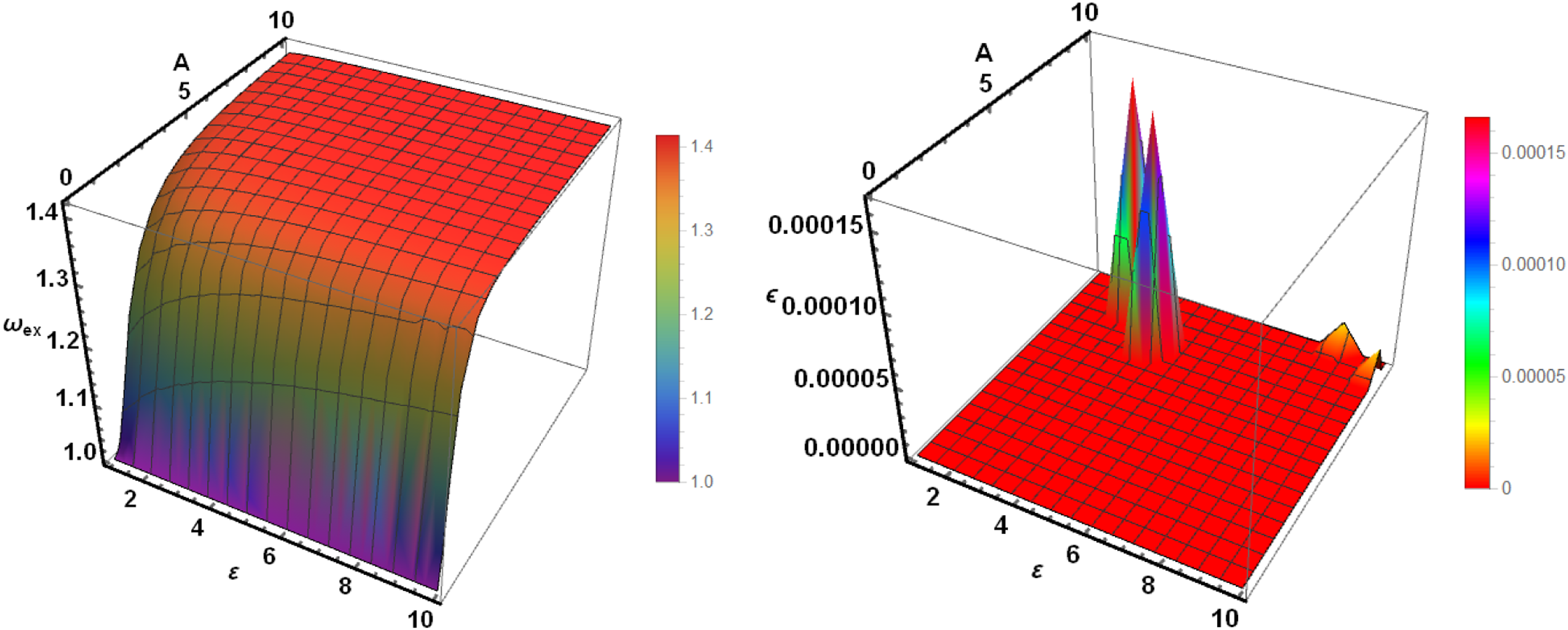
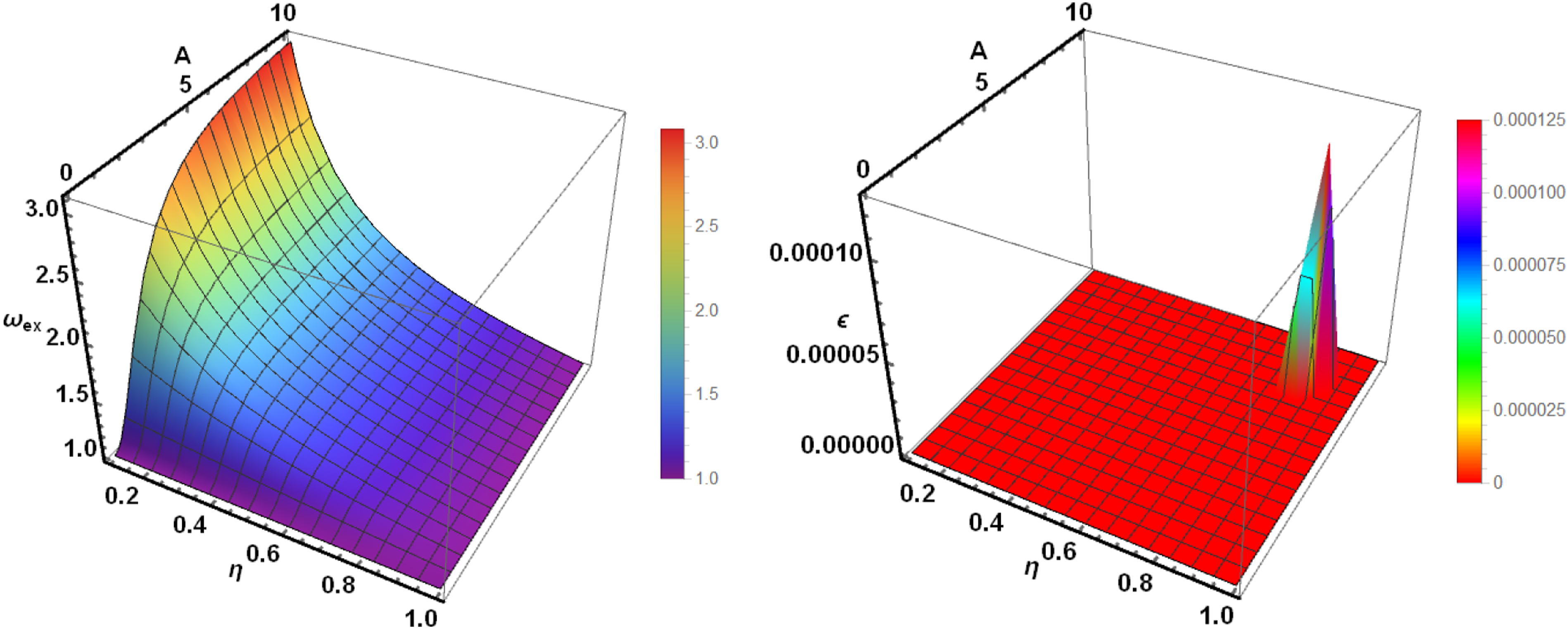
Figures 2–5 show the dependence of the frequency–amplitude response on the nonlinear factor, Frequency–amplitude response and error in numerical solution for Frequency–amplitude response and error in numerical solution for Frequency–amplitude response and error in numerical solution for Frequency–amplitude response and error in numerical solution for 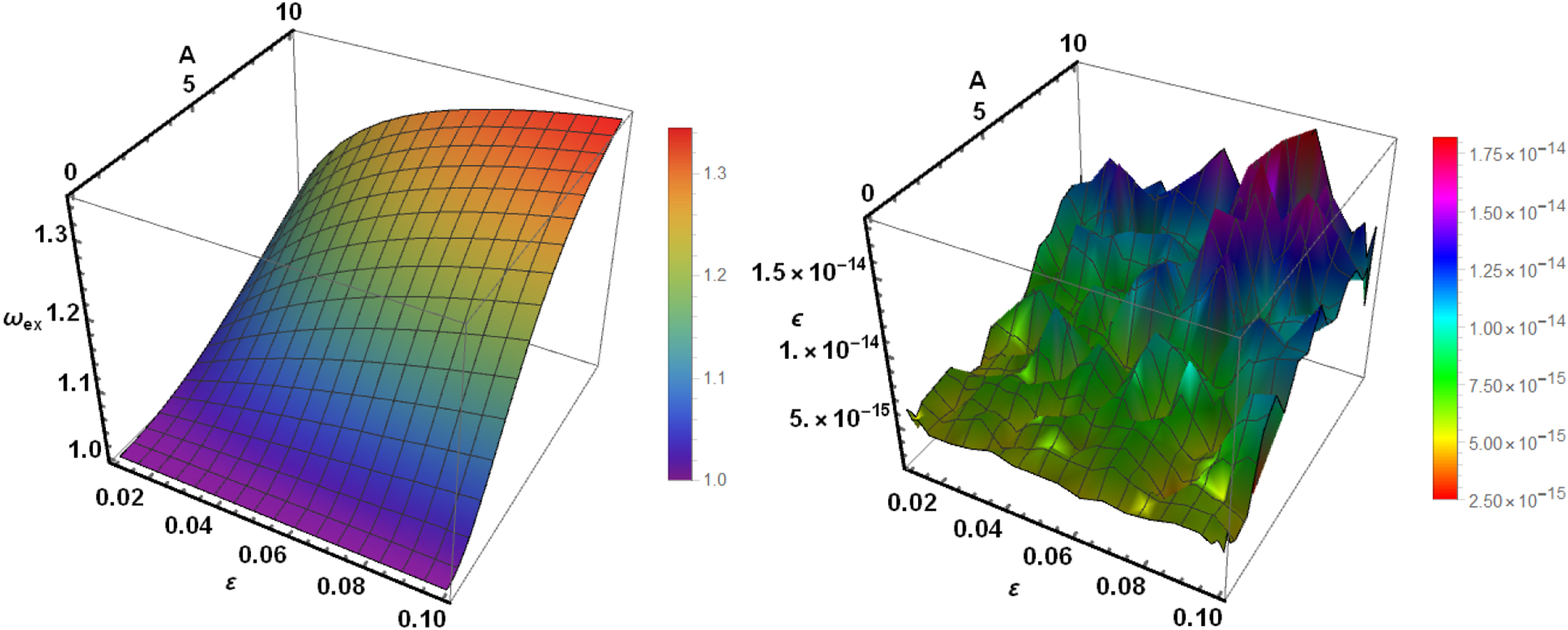
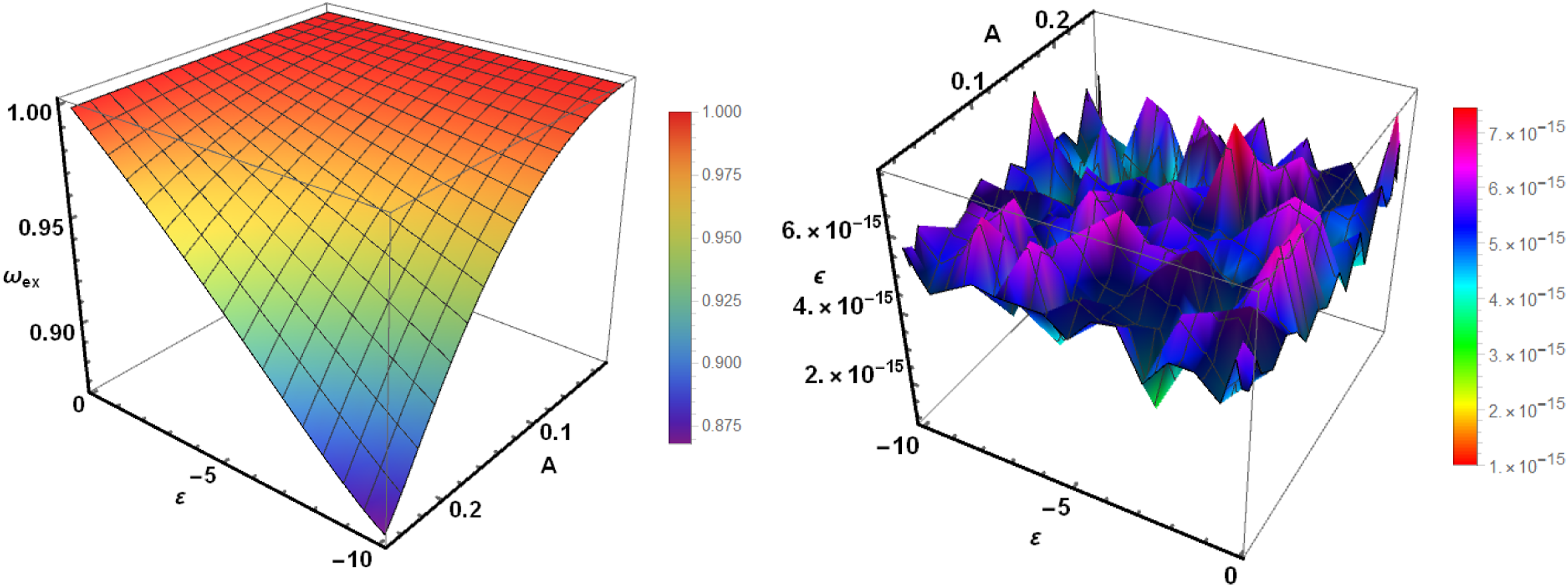
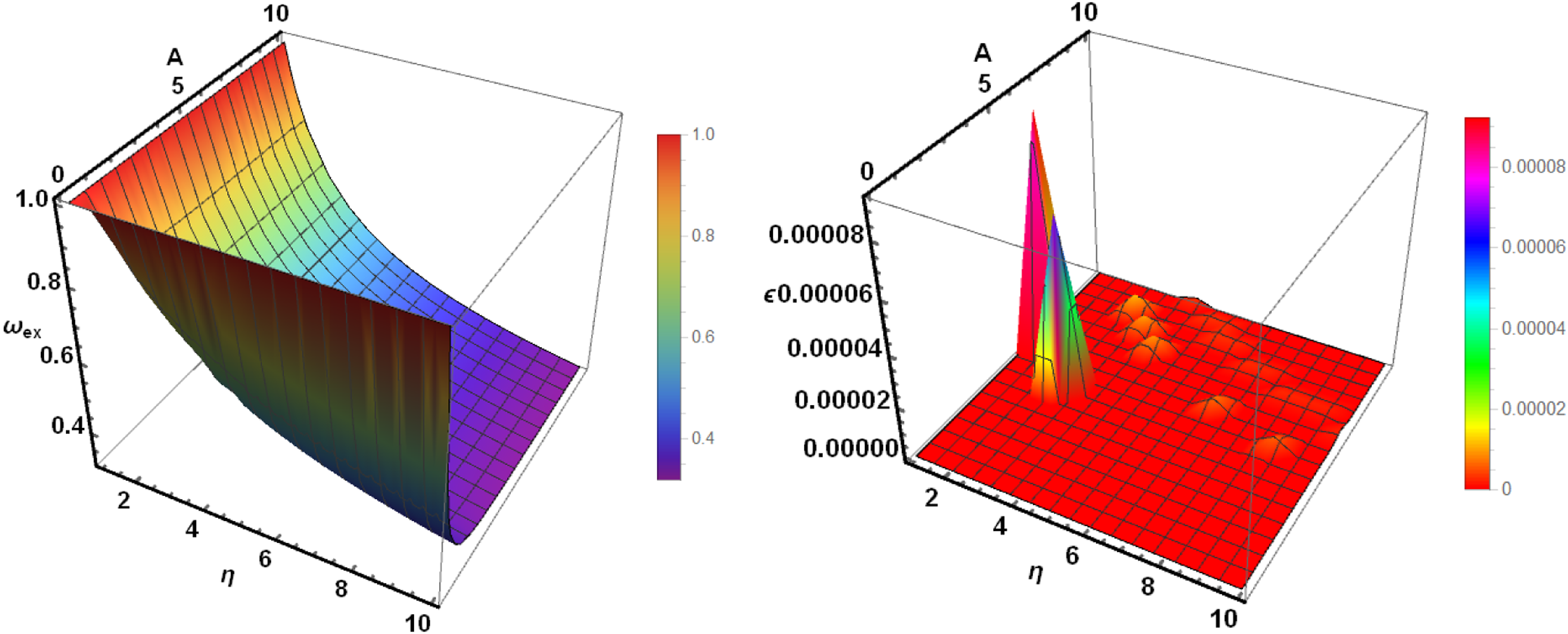
Figures 6–8 illustrate the dependence of the frequency–amplitude response on the linearity factor, Frequency–amplitude response and error in numerical solution for Frequency–amplitude response and error in numerical solution for Frequency–amplitude response and error in numerical solution for 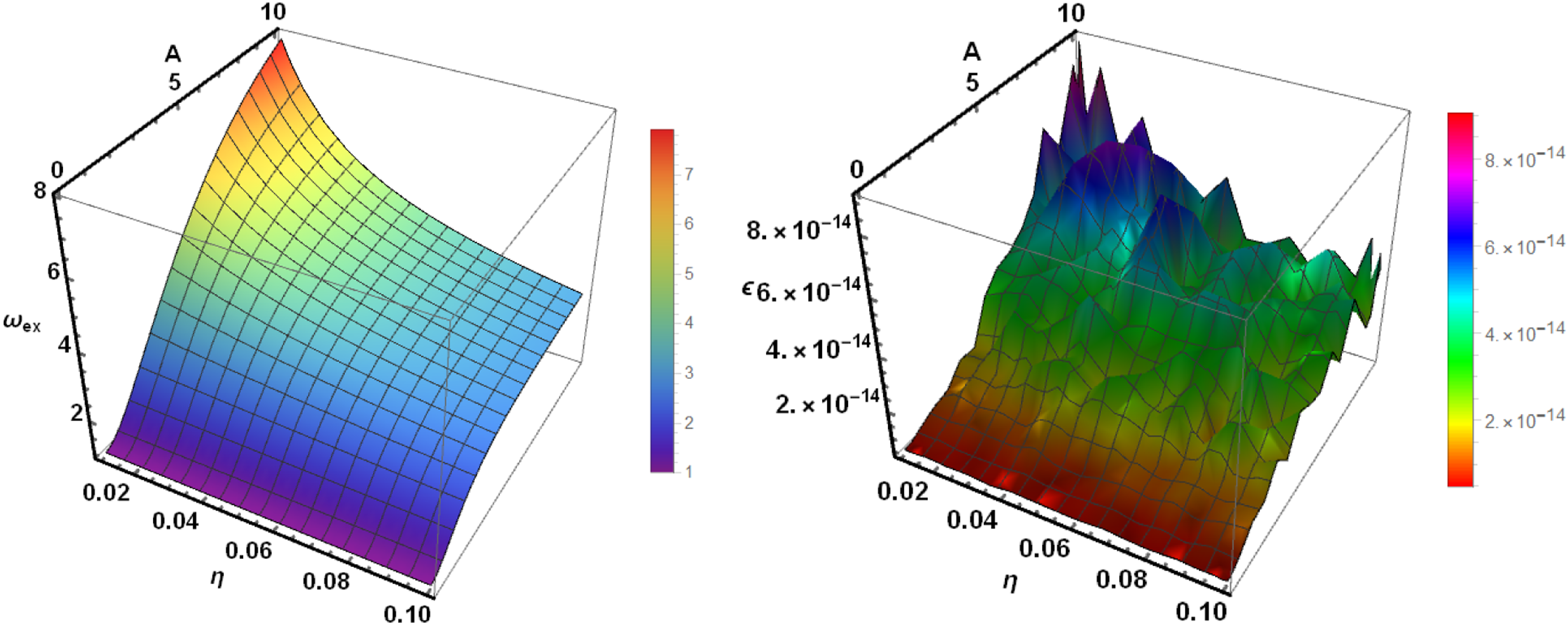
Furthermore, it was observed that the frequency increased when
Finally, Figures 2–8 show the absolute error obtained by solving equation (13) numerically. These plots show that the numerical error was oscillatory in nature and generally negligible (close to machine epsilon precision) for most cases. However, there were instances where the numerical solution produced significant errors and the frequency estimate was accurate to less than five decimal places (see Figures 4, 7 and 8). Therefore, the numerical method was not found to be reliable for all possible frequency solutions of the system under consideration.
Phase response
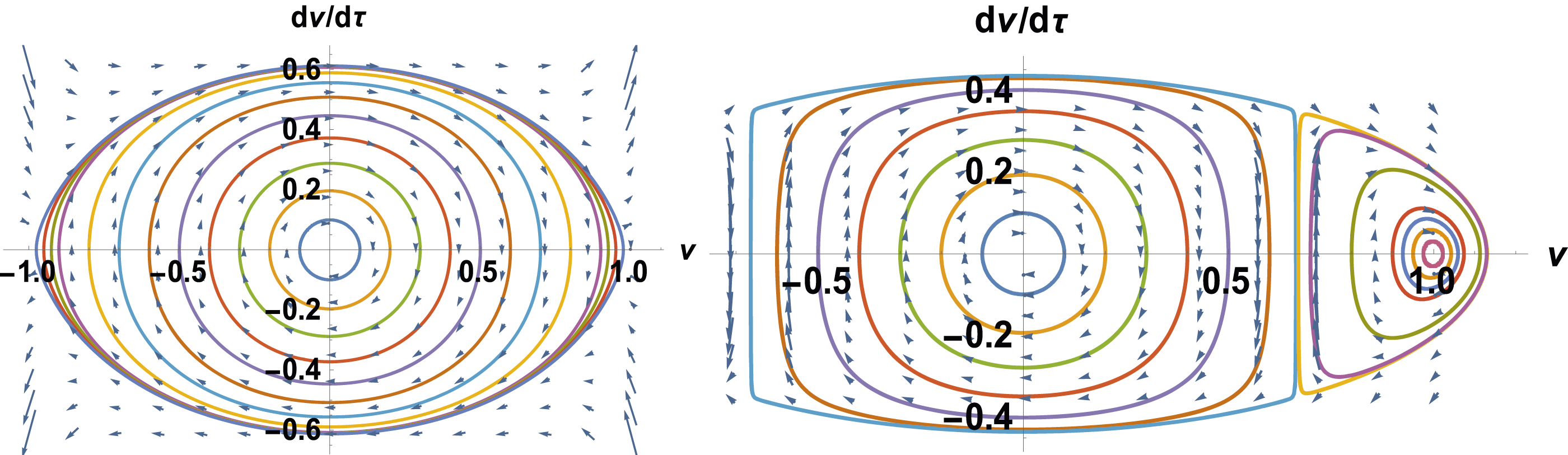
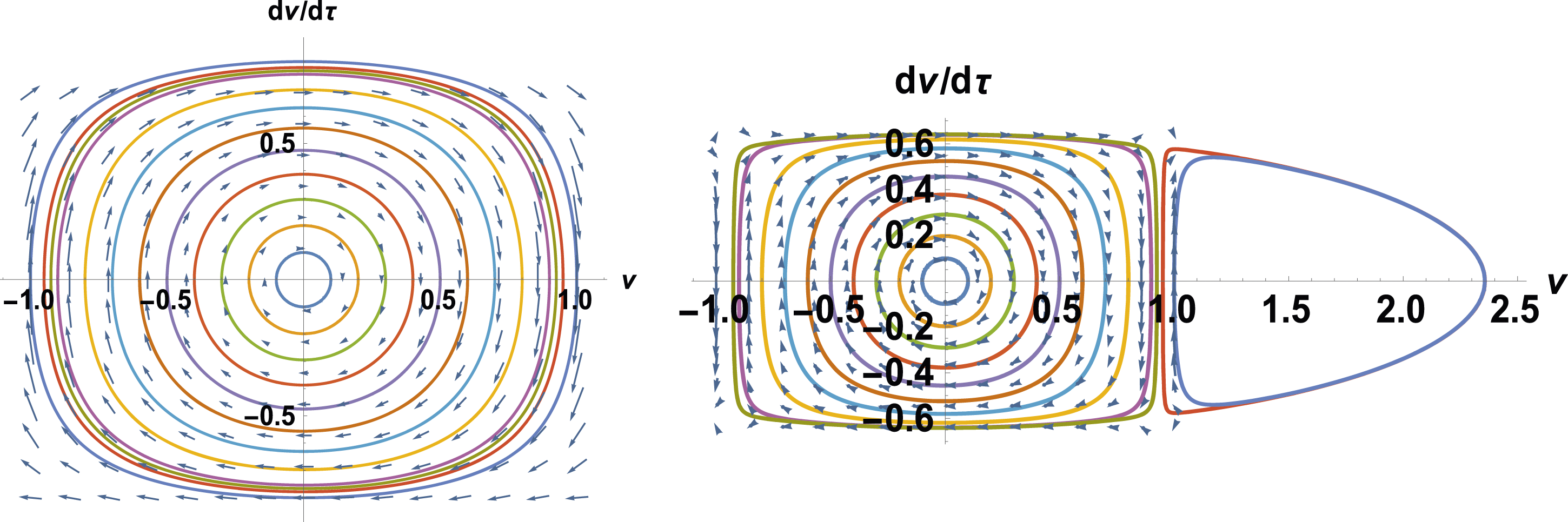
The phase response of the relative motion can be obtained from equation (11), and phase diagrams for different conditions of the present system are shown in Figures 9–12. The ratio of the maximum velocity to the maximum displacement of the system, that is Phase portrait. Left: Phase portrait. Left: Phase portrait. Left: Phase portrait. Left: 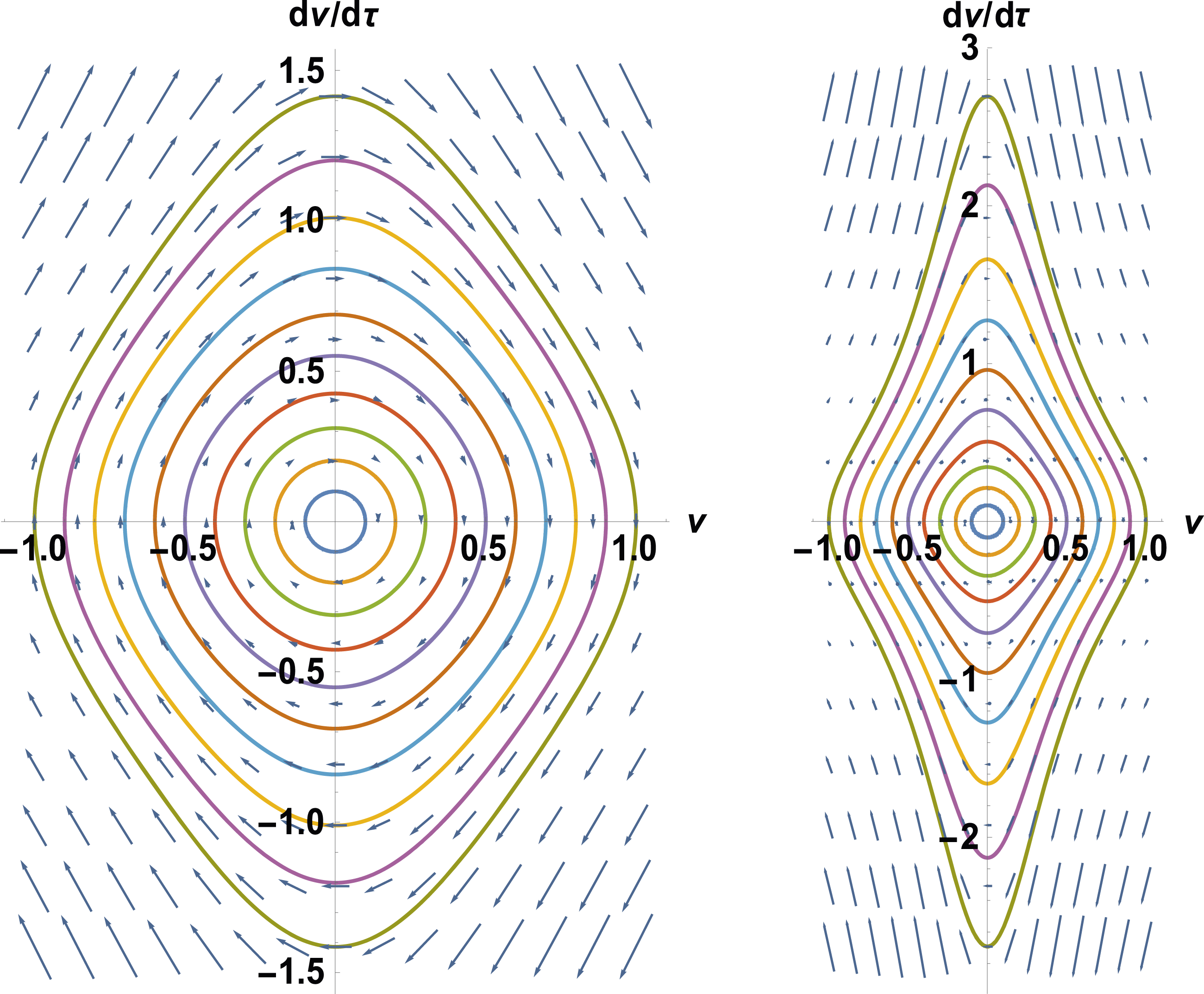
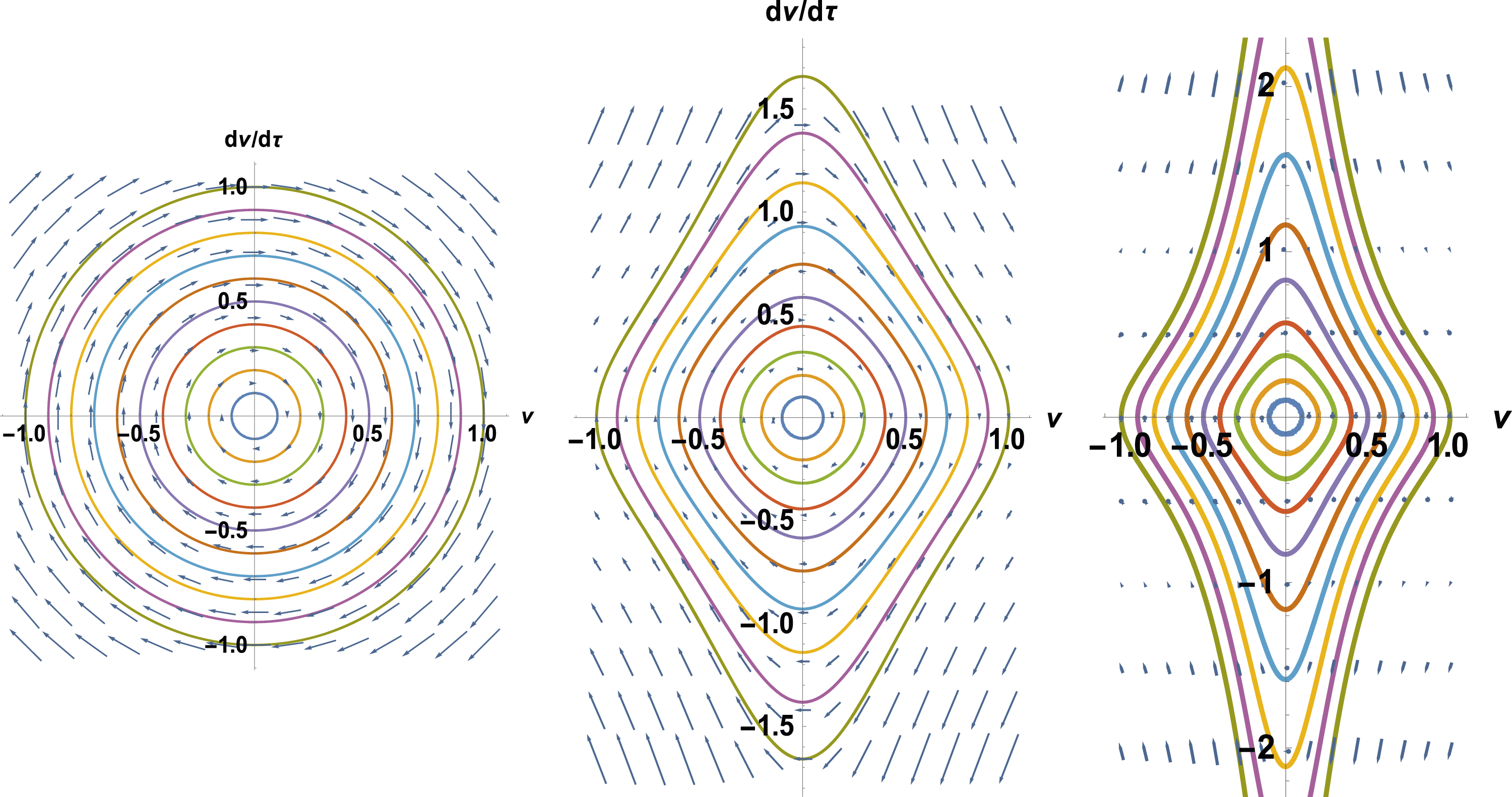
In Figure 9, the nonlinearity parameter (
Figures 11 and 12 show the phase diagram of the system when
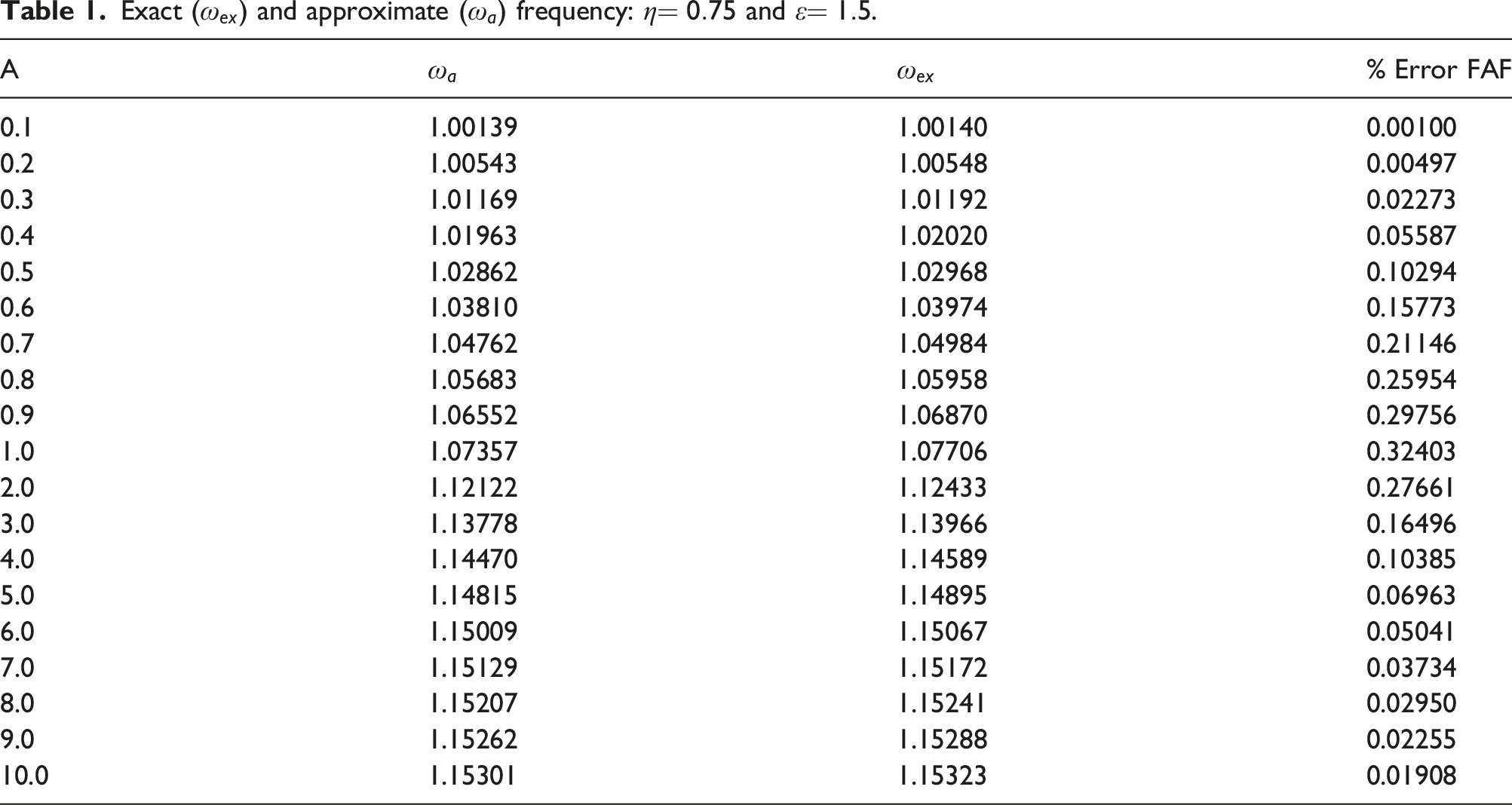
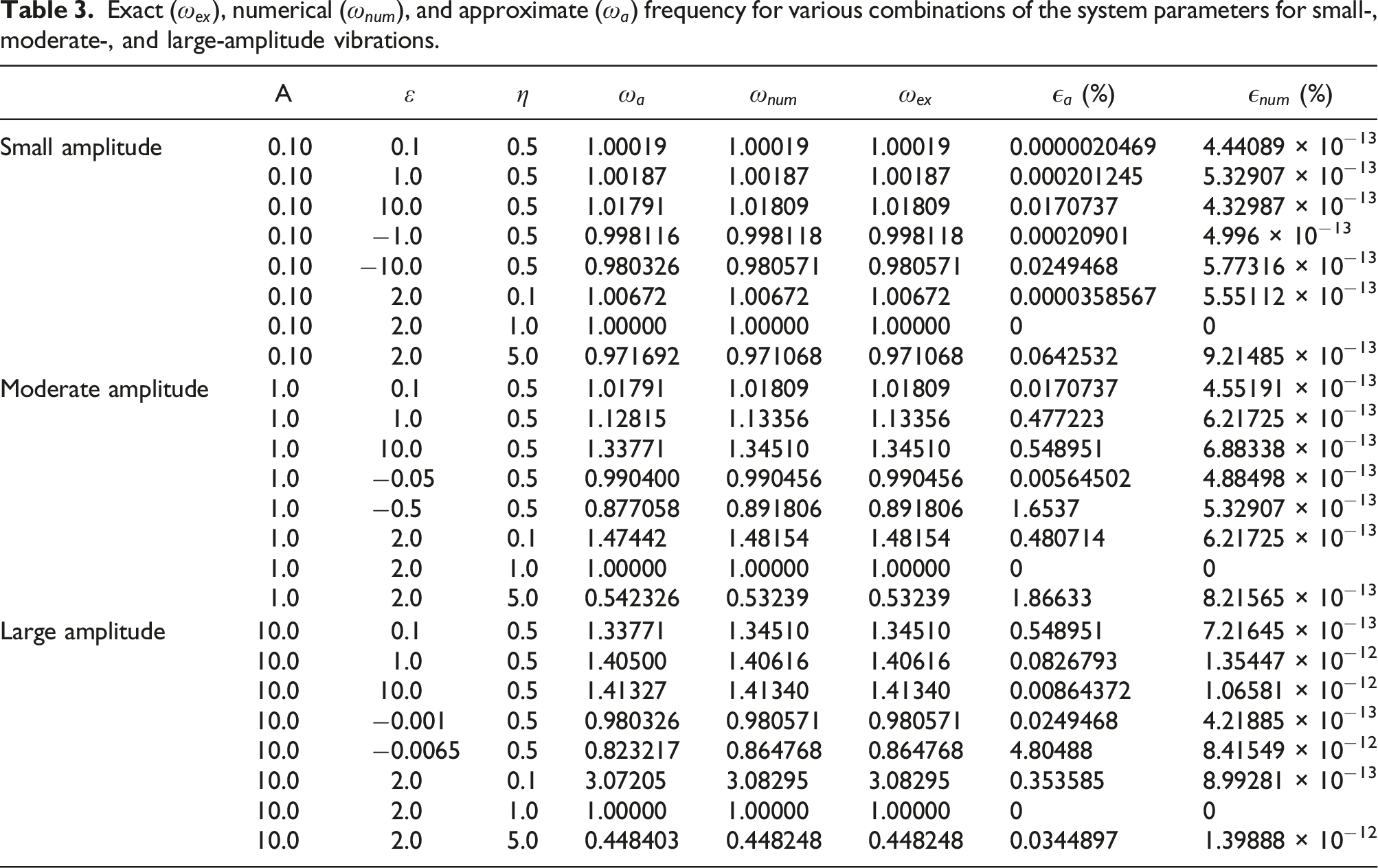
Approximate frequency–amplitude response
Exact (
Exact (
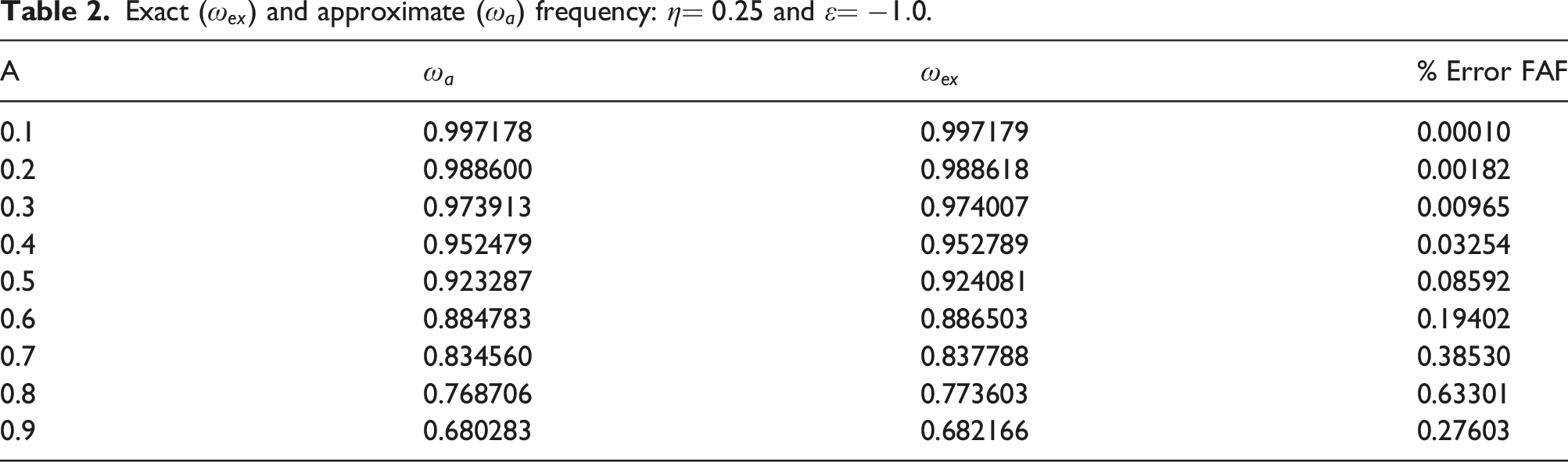
Exact (
Conclusions
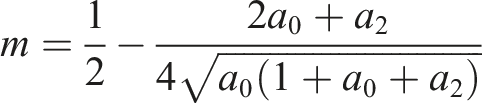
The exact frequency–amplitude solution of a mass grounded by linear and nonlinear springs in series was derived in a closed-form based on the complete elliptic integral of the first and third kinds. This was achieved by transforming the exact integral of the nonlinear ODE governing the relative motion into a form that can be evaluated using standard tables of elliptic integrals. The closed-form solution showed that the response of the system depended strongly on the static nonlinearity of spring 2 (
The simulated results revealed the following: a) The frequency increased with an increase in the hardening nonlinearity, that is, when b) The frequency decreased with an increase in the softening nonlinearity, that is, when c) The frequency decreased with an increase in the linearity factor, that is, when d) The frequency responses observed in (a) to (c) above are more pronounced at higher amplitudes. e) The frequency is approximately constant for small amplitudes ( f) The ratio of the maximum velocity to the maximum displacement of the system, that is, g) The system has bifurcation points at h) The traditional numerical method can produce significant errors in some cases and cannot be relied upon in all cases. Therefore, the present exact solution should be used to verify the accuracy of other approximate solutions instead of numerical solutions. i) He’s FAF is a simple method that can be used to derive fast and reasonably accurate approximate solution to the nonlinear frequency response of complex vibrating systems. However, it was observed that the approximate analytical solution produced misleading predictions of the conditions for periodic oscillation. This implies that such predictions should be subjected to further verification using more rigorous alternatives such as experimental results, exact analysis, or finite element solutions.
Finally, the present study reveals the complex nature of the oscillations of the mass grounded by linear and nonlinear springs in series. A thorough qualitative analysis is required to provide a comprehensive set of conditions under which the system experiences different responses. The qualitative analysis should include bifurcation and stability analysis. Also, the extension of the present differential-algebraic equation modelling approach to investigate other types of nonlinear springs in series will provide a basis for analysing the vibration of machine components with different combinations of elastic members.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.