
Abstract
Structural modal estimation has consistently remained one of the most crucial areas of research in mechanical vibration analysis and signal processing. It is imperative to accurately monitor the vibration signals of rotor blades and their corresponding structural modal parameters. Blade tip timing (BTT) is a promising approach used to measure vibration and monitor the health of blades. However, most existing BTT methods focus on frequency accuracy, neglecting damping, a key physical quantity that represents the strength of the structure. This research focuses on damping modal estimation of blade vibration and proposes a sparse reconstruction algorithm based on a two-dimensional Laplace wavelet family, which addresses the inherent under-sampled problem of BTT technology while enabling estimations of both the structural modal frequency and modal damping of the blades. Firstly, the proposed algorithm is achieved by designing a Laplace wavelet dictionary based on prior information and using a convex optimization objective function with a regularization term. Secondly, Laplace wavelet dictionary matches the signal better than the traditional Fourier dictionary based on the similarity between the damped vibration signal and the Laplace wavelet, then a sparser representation vector can be obtained. Moreover, the research object is not limited to a single blade, but can be easily expanded to multiple stages and multiple rotating blades monitored simultaneously. Finally, the simulation and physical test results indicate that the proposed method exhibits high reconstruction accuracy, reliability, and anti-noise abilities.
Introduction
Rotating machinery blades are key components of aero-engines. During operation, they are subjected to high temperatures, pressures, and loads for long periods of time, which often leads to failures, such as high-cycle fatigue, cracks, and fractures. 1 There are various reasons for blade failure, such as erosion of high speed airflow, and rotor imbalance. Several methods have been proposed to ensure the stable operation of the blade and extend the fatigue life;2,3 however, the main reason for blade failure is the high-amplitude and high-order vibration, 4 and many articles also focus on the devastating vibration of the blade for fault diagnosis research.5,6 If the blade dynamic strength is insufficient (especially under the aerodynamic interactions between the elastic blade and the internal flow field), this situation may induce flutter, that is, the blade could generate aero-elastic coupling self-excited vibrations. Once flutter occurs, the blade may break in a very short time because of the severe vibrations, and additional consequences may arise. In terms of ensuring the safety and health of the engine, dynamic monitoring of the blade structure modal parameters has important theoretical research significance and practical engineering value. Blade tip timing (BTT) is a non-contact measurement method for identifying rotor blade vibration by recording the time at which the blade reaches each installed probe. 6 In addition to its strong reliability and simple operation, BTT is advantageous in terms of long-term online detection and vibration analysis; according to Ref [7], it has been widely applied for measuring blade vibrations in aero-engines. Refs. [8–11] have demonstrated the feasibility and stability of BTT technology, which was employed to measure and analyze actual blade failures. However, a blade only passes a sensor once during one complete rotation, and therefore, the sampling frequency of the BTT system is determined by the rotation speed and the number of sensors. In general, owing to the limitations of installation conditions and rotation rate, the sampling frequency of the BTT system does not satisfy the Nyquist sampling theorem.12–14
Researchers have proposed various specialized methods to extract vibration parameters from the under-sampled signal. For the fluttering rotating blade, it is in an unstable motion state. There are several traditional methods to analyze the stability of the blade system by building mathematical models and deriving precise equations of motion.15–19 A second-order differential multi-harmonic balance equation of the blade vibration was developed in literature. 20 The key determinants of the vibration are the quality, elastic coefficient, and damping coefficient of the blade. Zhao et al. used beam-beam impact modeling and finite element analysis to examine the vibration-shock response of shrouded blades. 21 The single degree of freedom (SDOF) approach uses a BTT sensor to measure the rotation speed and the vibration amplitude of the blade when resonance occurs under variable speed conditions. 22 The two-parameter plot (TPP) strategy equally installed four or more probes in casing to collect the data while operating at a constant rotation rate. 23 The autoregressive method calculates the frequency doubling value of the blade vibration by introducing an autoregressive equation. 24 Joung et al. developed a circular Fourier fit (CFF) method, which relies on the Campbell diagram obtained from finite element analysis to confirm the frequency. 25
In 2006, Donoho et al. proposed a new signal acquisition theory known as compressed sensing (CS) 26 or sparse reconstruction, which breaks through the technical bottleneck of Nyquist sampling theorem. According to this theory, as long as the signal is sparse within a certain transform domain, the original structure of the signal is maintained through linear projection. After solving the optimization problem, the original signal can be accurately reconstructed using only a few sampling points. In recent years, CS theory has been applied to the field of BTT wildly. In 2016, Lin et al. 27 applied this theory to process under-sampled BTT signals and precisely identified the vibration frequency. Pan et al. 28 developed an improved frequency spectrum recovery method that could reach a guaranteed level of sparse solution with biased measurement results, and they studied the influence of measurement uncertainty on the reconstruction. Pan et al. also 29 constructed a dictionary of CS based on a dictionary learning method to make it more adaptive. According to the sparseness of the BTT signal in the order domain, Chen et al. 30 proposed a compressed sensing-based order analysis (CSOA) method, which can accurately obtain the order spectrum under variable rotation speed conditions. This CSOA method also allows for considerable installation angle errors, which makes it more applicable in real-life situations. This method is only valid for synchronous vibration. Recently, compressed sensing method based on deep neural networks31,32 has shown great advantages. Wu et al. 33 proposed a deep compressed sensing model, and trained a Generative Adversarial Networks (GAN) to reconstruct the BTT signal, without relying on iteration and prior information. Chen et al. 34 trained a Convolutional Neural Network (CNN) to reconstruct the BTT signal, and applied rectified linear unit (ReLU) layer and batch normalization (BN) layer in the network to improve the training effect of the CNN.
However, most of the existing methods based on compressed sensing focus on the accuracy of the modal frequency, while ignoring the damping, which is a key physical quantity representing the strength of the structure. The damping vibration of blades is the general form of blade vibration, and it is also the initial vibration form of dangerous vibrations such as flutter et al. The modal estimation of damping vibration signals is of great significance to the vibration monitoring and early warning of blade. The modal damping of the static blade can be determined using a half-power bandwidth35,36 method and/or a hammer method. 37 For rotating blades, damping can be calculated from the stress or pressure measured by installed gauges 38 or miniature pressure sensors. 39 However, such methods are not suitable for comprehensive monitoring of multi-stage blades because they are not sufficiently reliable and require complicated operations.
To comprehensively estimate the structural vibration modal parameters of rotating blades, this article proposes a signal reconstruction method based on the compressed sensing theory and blade tip timing technology, named Laplace Wavelet-based Basis Pursuit (
Blade tip timing principle
Typically, the BTT sensor is installed along the circumference of the casing, which can be uneven. A pulse is generated at the instant the blade passes the BTT sensor. Meanwhile, a reference sensor is installed on the rotating shaft, and a reflective mark is placed on the shaft. Each time the impeller completes one revolution, a rotation speed signal can be obtained. Figure 1 shows the various components of the BTT system. Theoretically, the time recorded by the sensor when the blade does not vibrate can be calculated using equation (1),
40
Blade tip timing system.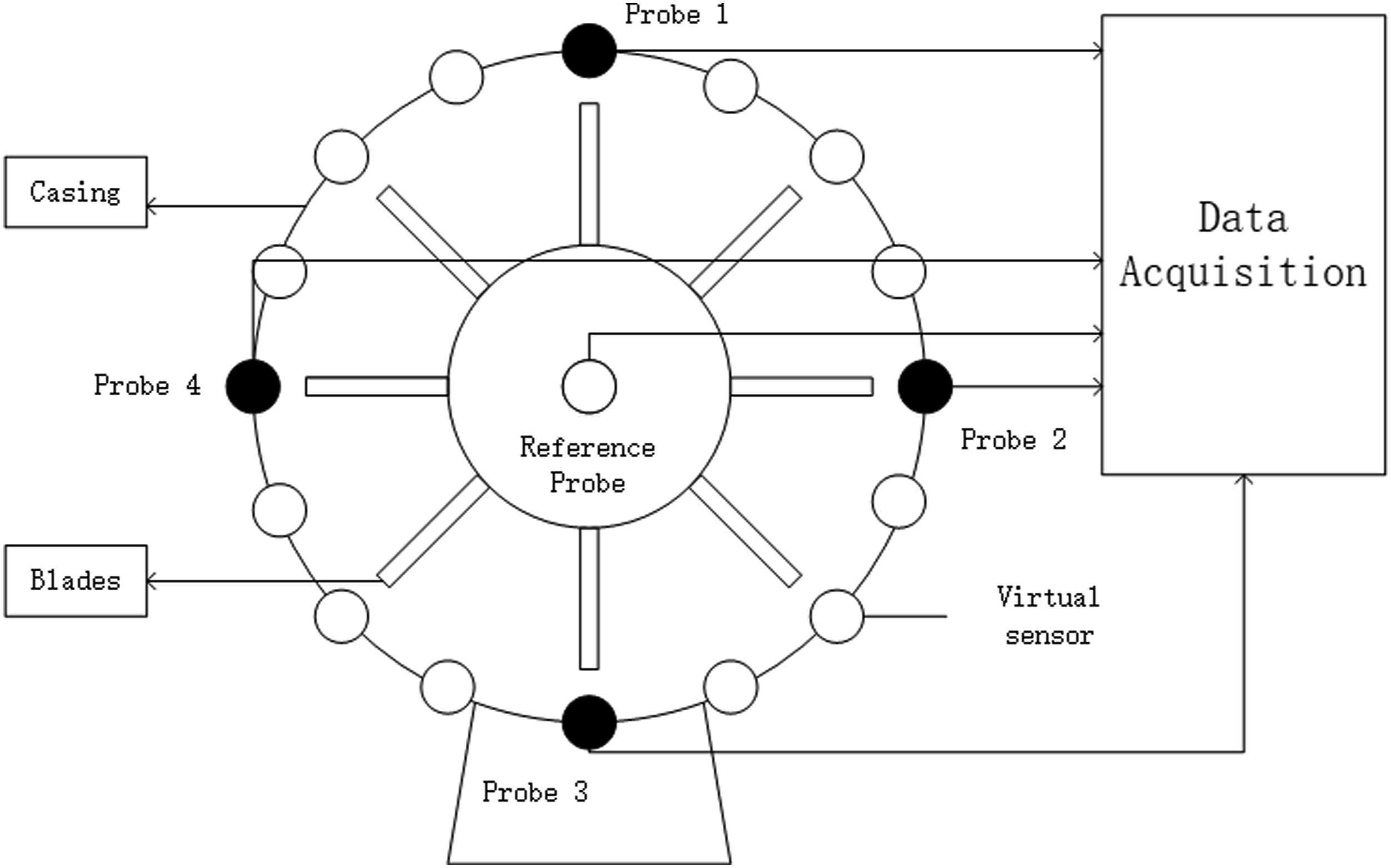



A blade can only be measured once by a sensor in a single rotation. Therefore, the sampling rate of the BTT measurement is determined by the number of sensors and the rotation frequency, according to the relationship in equation (4),

LWBP method
Compressed sensing model of BTT sampling
In this section, compressed sensing model, which is the theoretical basis of LWBP, will be introduced. The sampling frequency of the BTT system is often less than the vibration frequency of the blade because of the limitations of the installation conditions and rotation speed. Therefore, the signal obtained by BTT sampling does not satisfy the Shannon sampling theorem
According to the compressed sensing theory, the signal is sparse if it can be represented by several coefficients in the sparse domain, which is composed of basic functions. A collection of these basis functions is known as a dictionary, wherein each basis function is called an atom. Based on the sparsity, data compression can be completed while sampling, and the original signal can be restored using fewer measured values. For the kth blade,
Suppose that the displacement signal containing all information for an arbitrary blade can be recorded by a total of








The compressed sensing model provides a theoretical basis for under-sampled signal reconstruction, and the
Designing a dictionary with a Laplace wavelet family
Modal parameters calculated by the matrix pencil method.

Accurate signal recovery depends on the sparsity of the signal in the transform domain, which requires high similarity between the atoms and the original signal. In general, the structural response signal with a single-modal is described by the mathematical model presented in equation (13),






By combining all the results, a total of 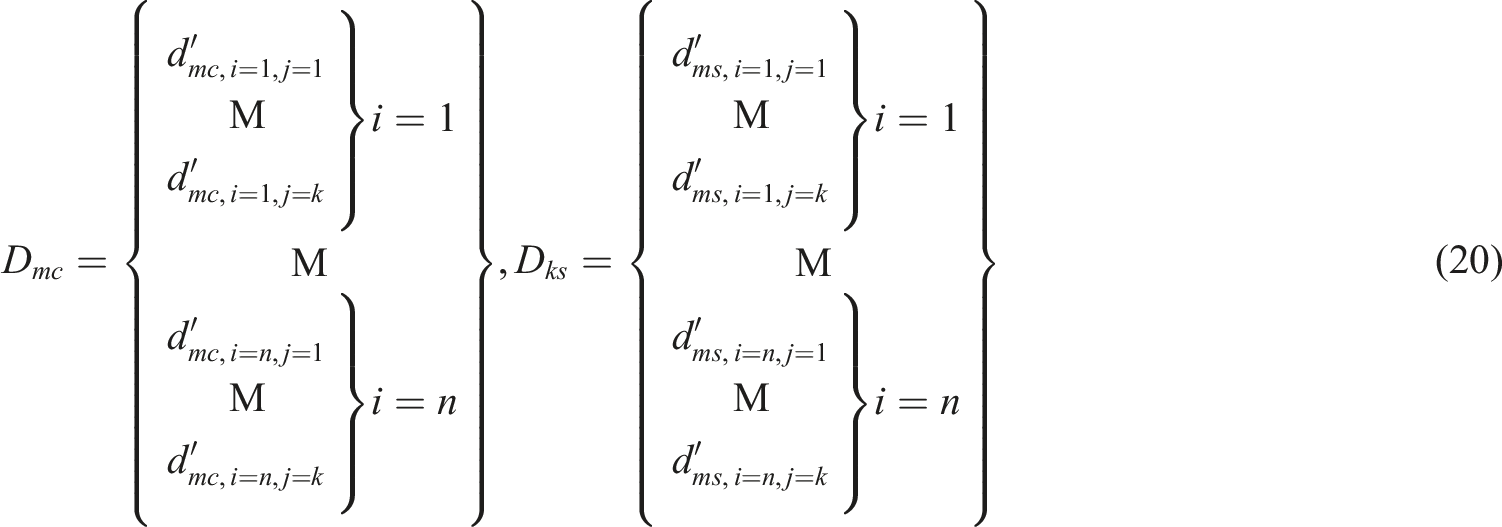
Then, the new dictionary composed of multiple sub-dictionaries can be expressed as shown in equation (21):
Each column in the dictionary represents an atom and the number of atoms is determined by
A Laplace wavelet dictionary 

According to the compressed sensing model of BTT signal in Section 3.1, equation (21) can be transformed into a sparse reconstruction problem. The problem of equation (23) can be expressed as a 
For the model in equation (24), the BP algorithm
47
is applied to achieve the sparsest solution of
In summary, this article proposes a signal reconstruction method based on the compressed sensing theory and blade tip timing technology. On the basis of the characteristics of the structural response signal with small damping,
Simulations
Verification of two vibration modals
Simulations were performed to verify the feasibility of recovering a structural response signal using 

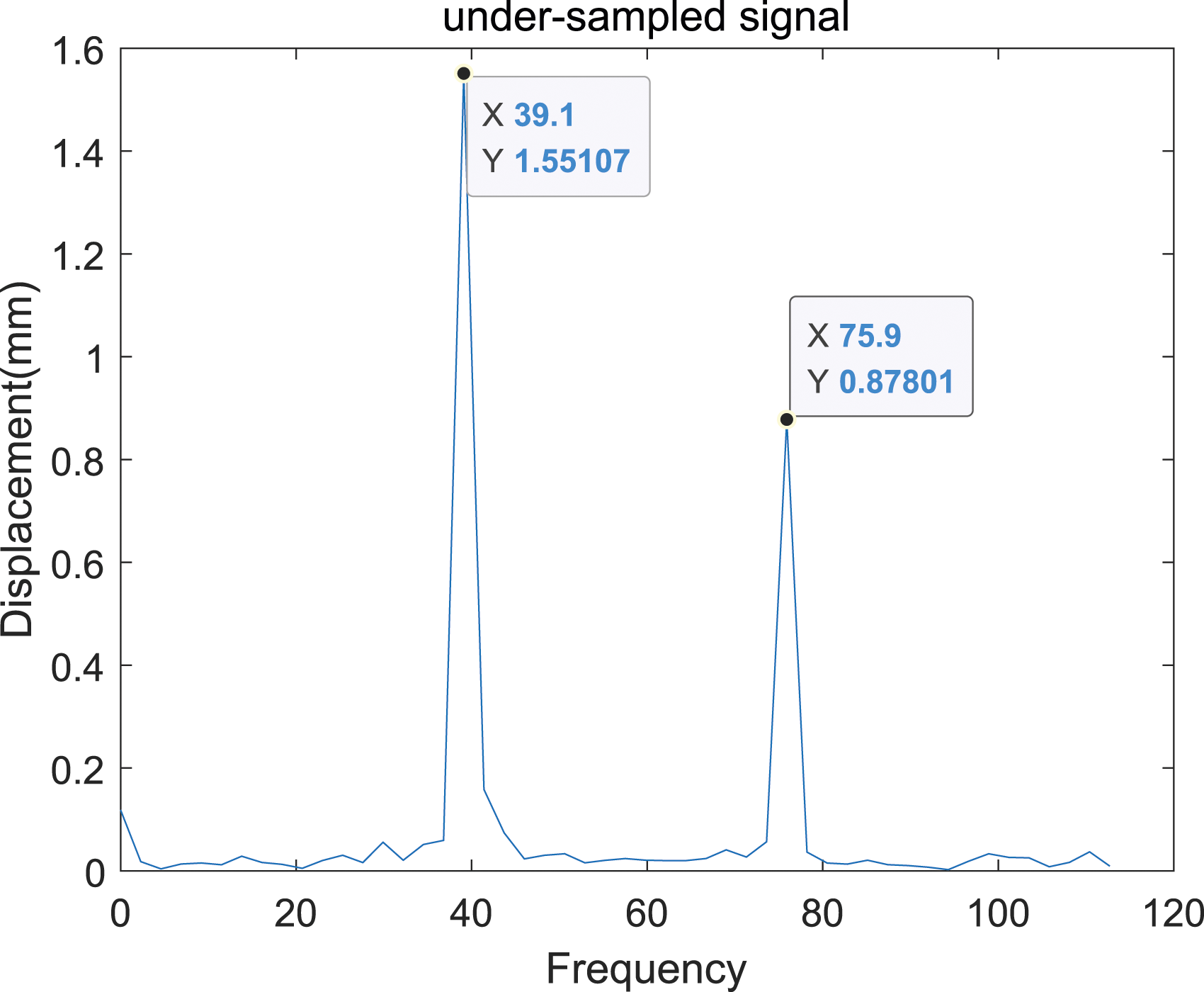
The time and frequency domain diagrams of the simulated signal are shown in Figure 2. Assuming that the blades are evenly installed in the circumferential direction of the casing, and only small damping vibration occurs, the blade disk rotating speed is stable. Setting Time domain and frequency domain diagrams of the original signal. Blade displacement sampled by (a) 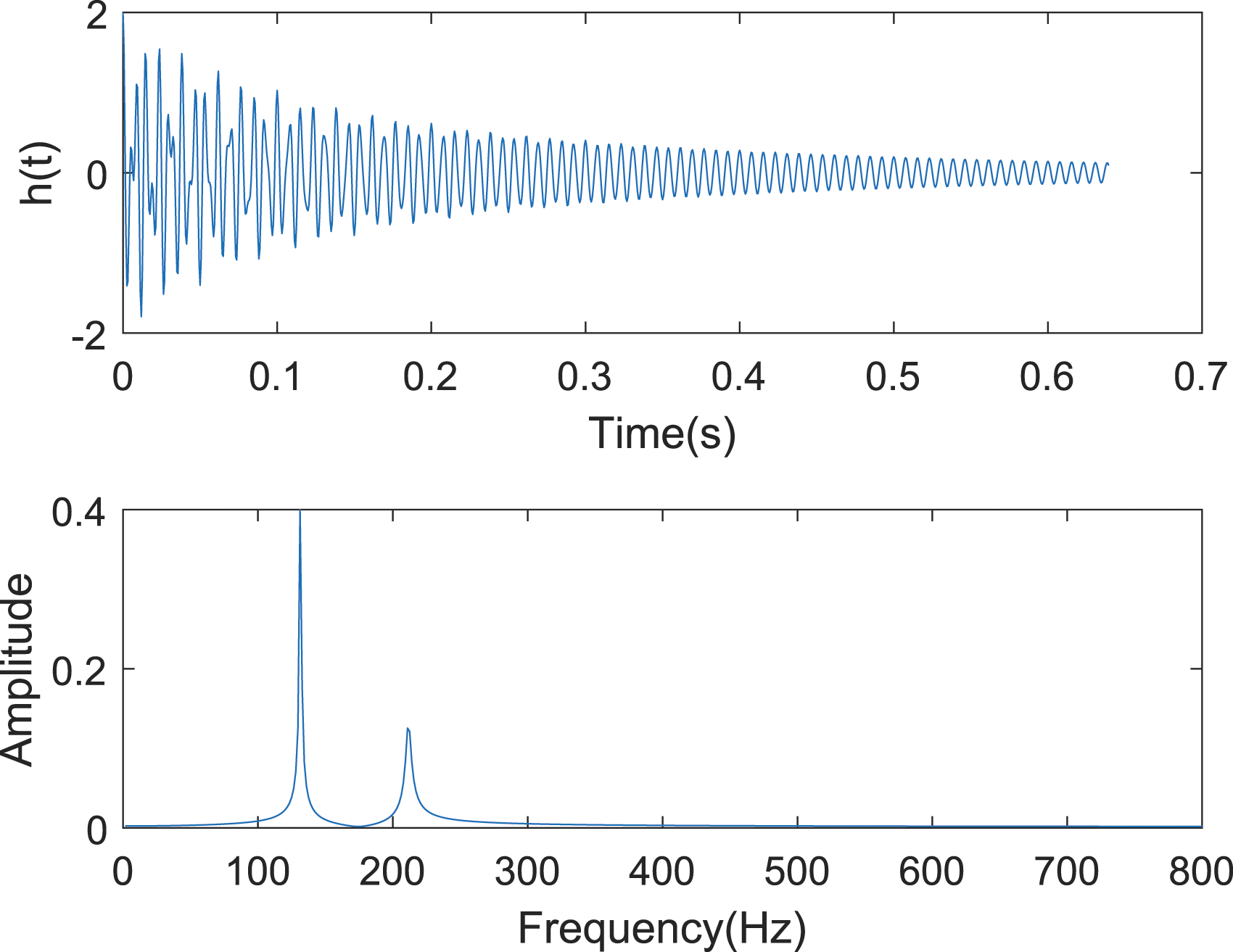
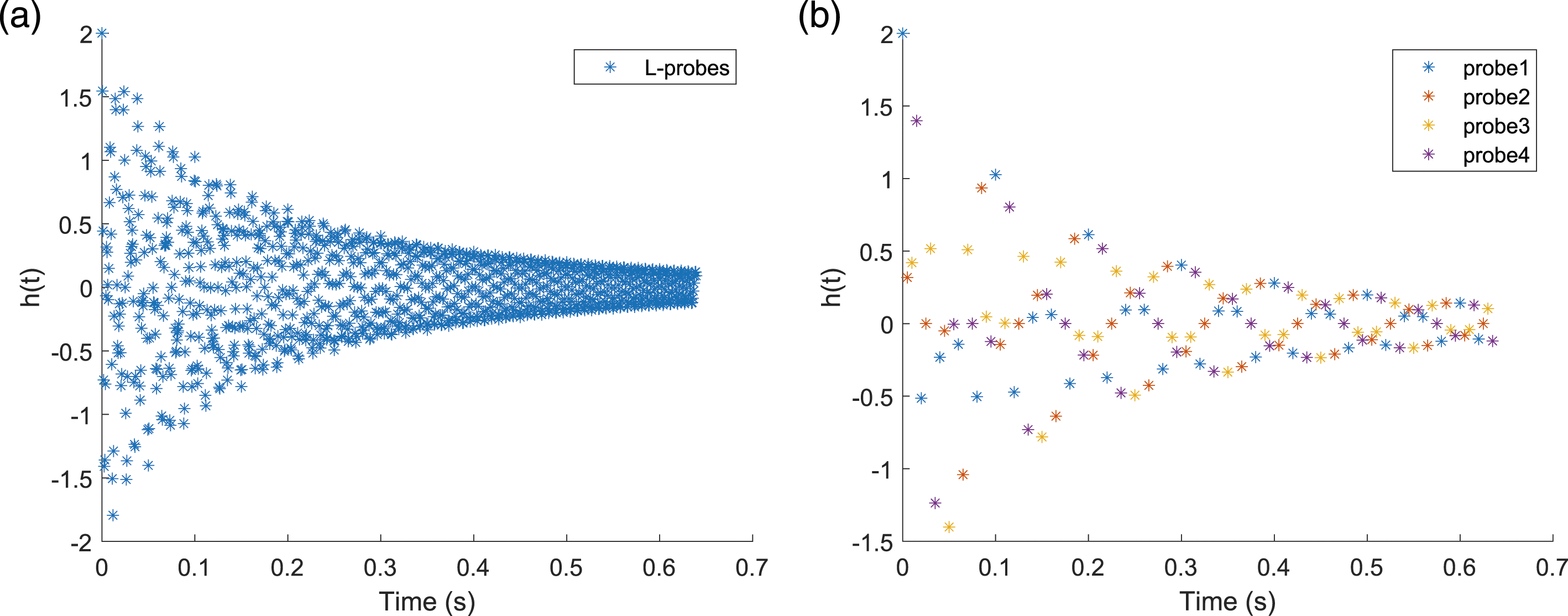
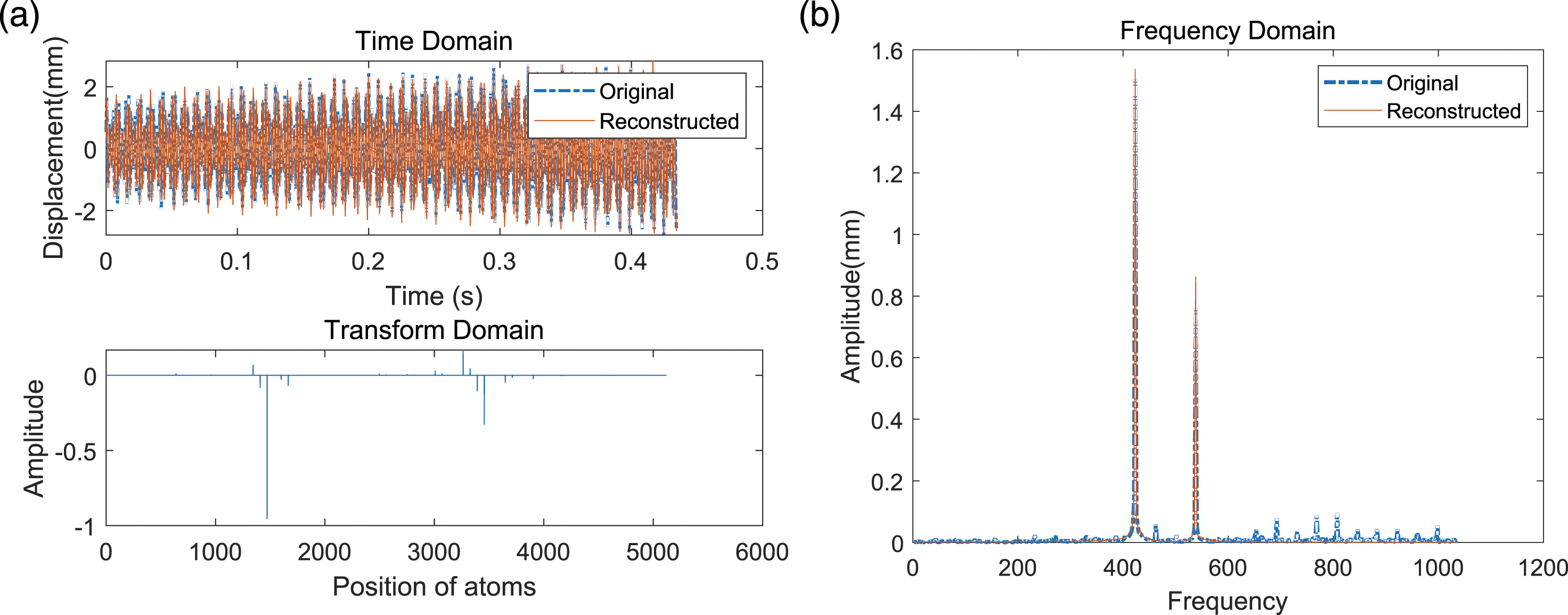
Setting the simulation time to 0.64 s yields a total of 1024 data points. Setting Reconstructed signal: (a) Time domain and (b) frequency domain of the signal reconstructed by the Laplace wavelet dictionary (c) time domain and (d) frequency domain of the signal reconstructed by a Fourier dictionary.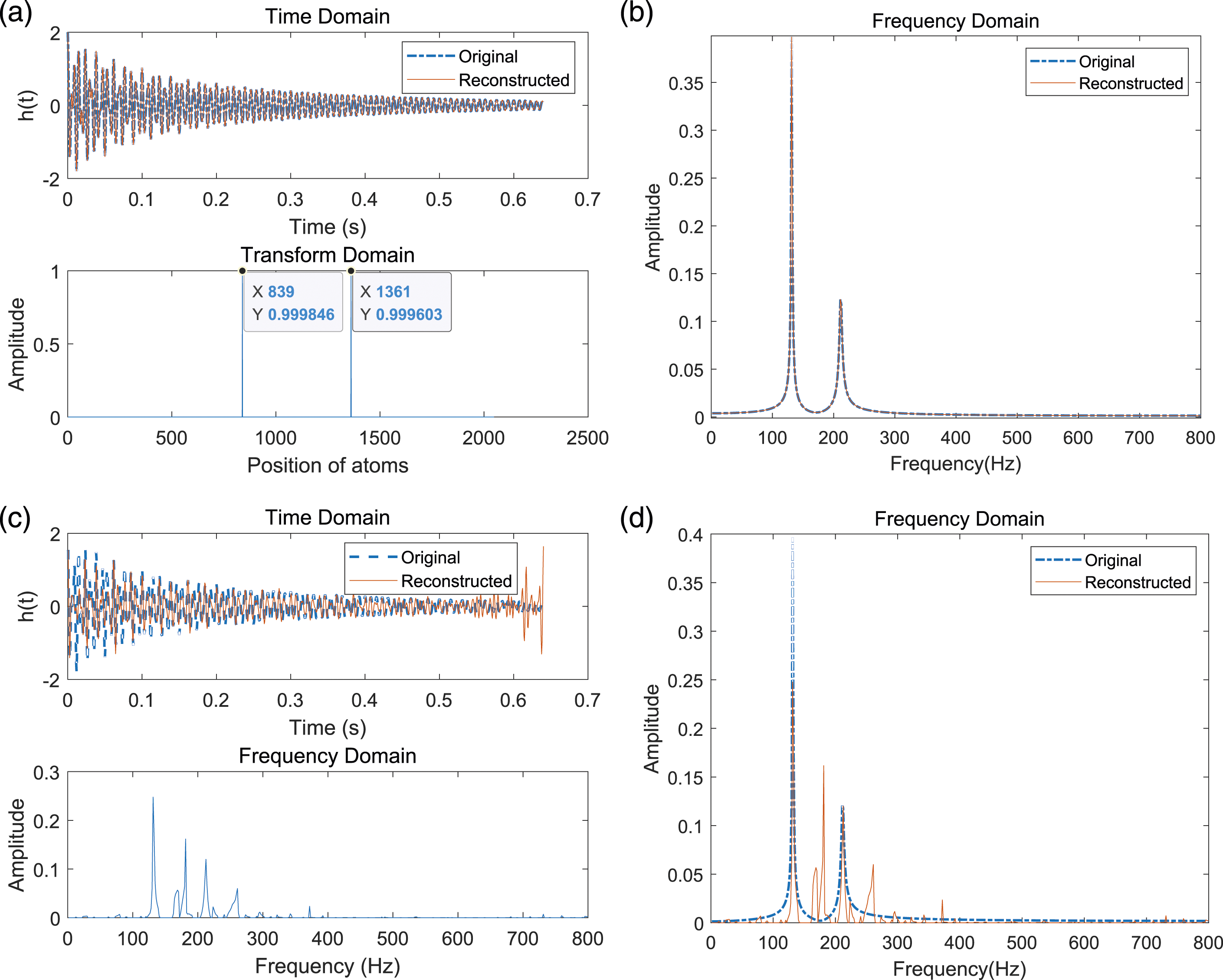
In fact, Figure 4(a) and (b) presents the ideal situation. In most cases, the modals of the original signal cannot be found in the designed dictionary. Some prior information is needed to focus the frequency and damping of the atoms within a certain range. Therefore, we generate an attenuated signal including two modals, as shown in equation (27):
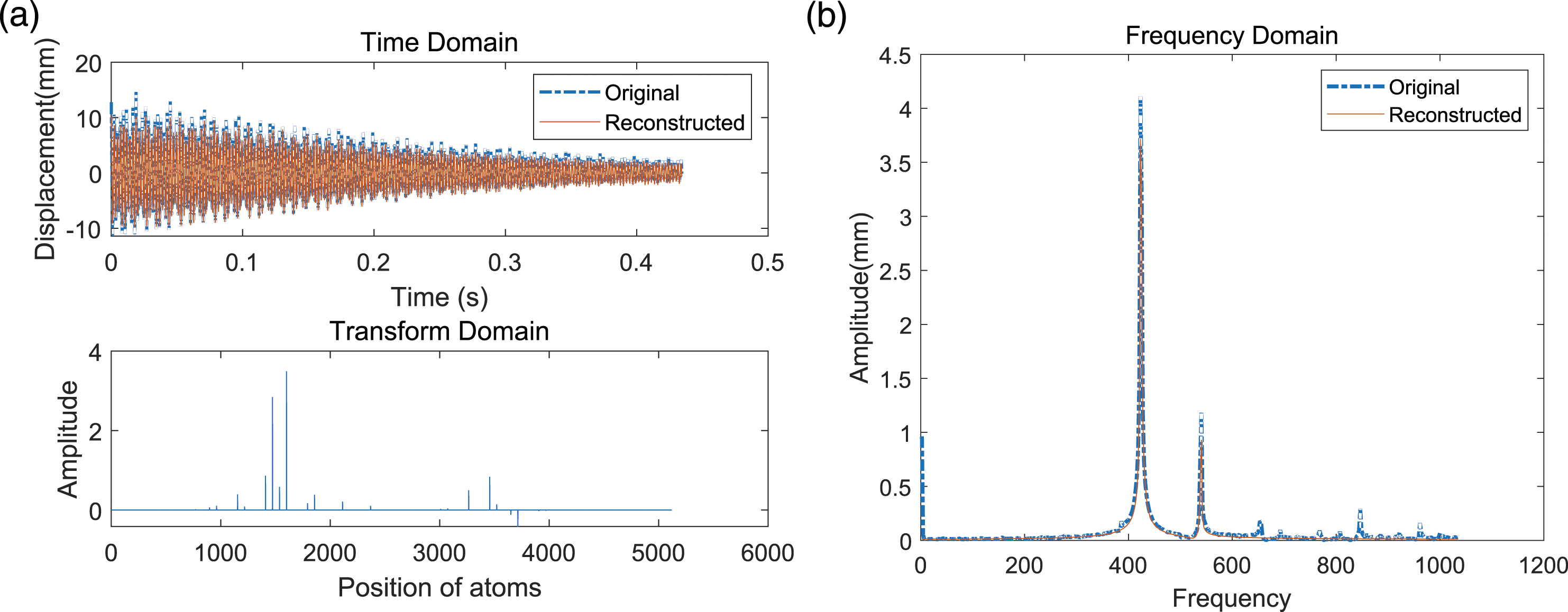
Assuming that the number of modals and approximate range of parameters have been obtained from the prior information, we set (a) Time domain and (b) frequency domain of signal reconstructed using the designed dictionary. Modal parameters calculated by the matrix pencil method.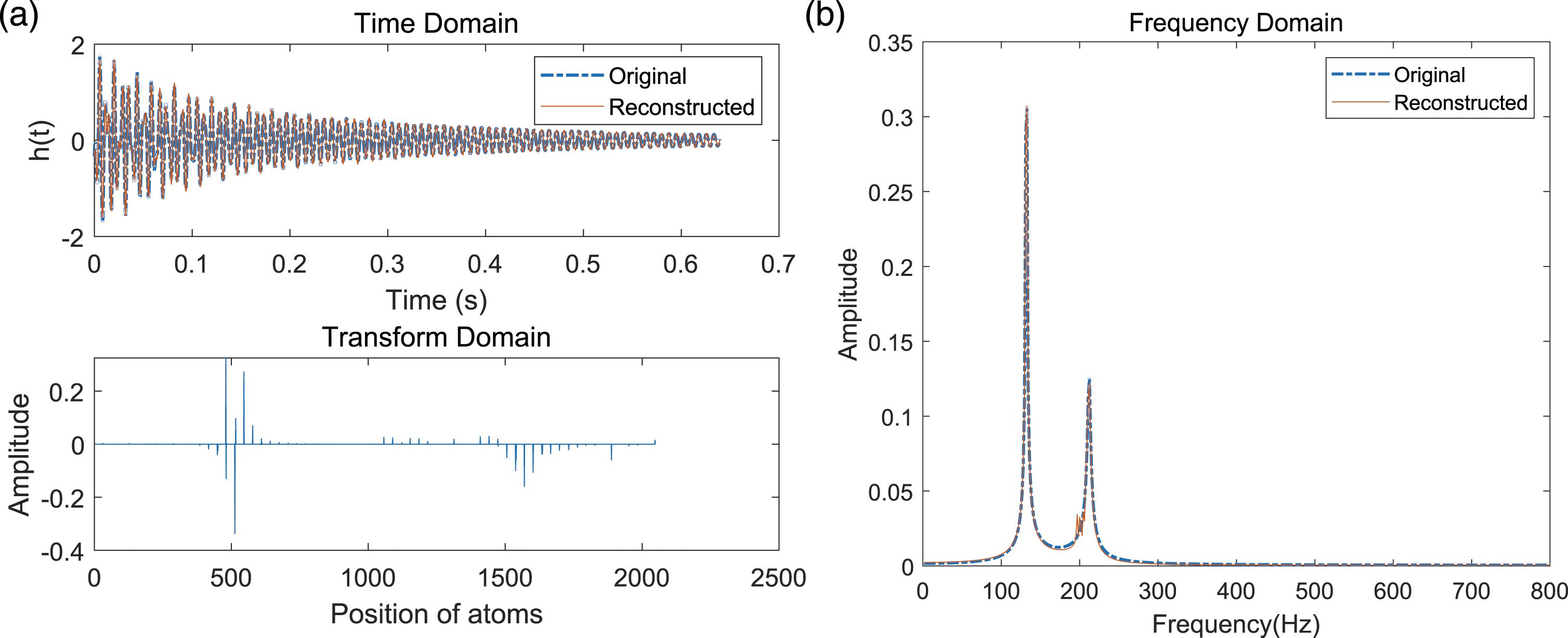

Table 2 clearly indicates that the errors in the modal parameters between the reconstructed signal and the original signal are very small. When the sampling time is longer, the atoms can be set more densely within a certain range, and the reconstruction effect improves. For signals with multiple modals, setting enough atoms around each modal enables enhanced reconstruction of the multi-modal structure response signal.
Anti-noise analysis
Simulation experiments were designed to test the anti-noise performance of 


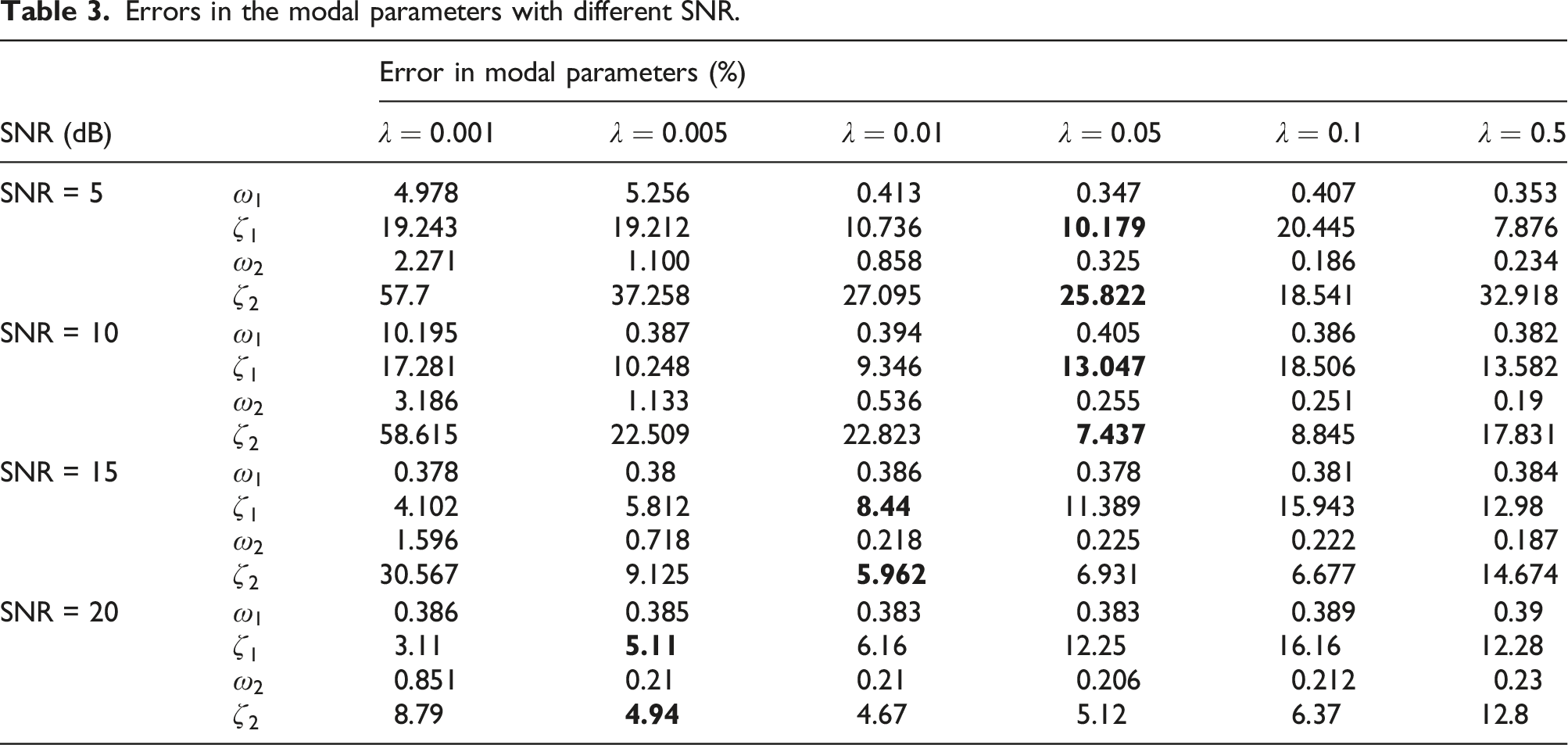
Errors in the modal parameters with different SNR.
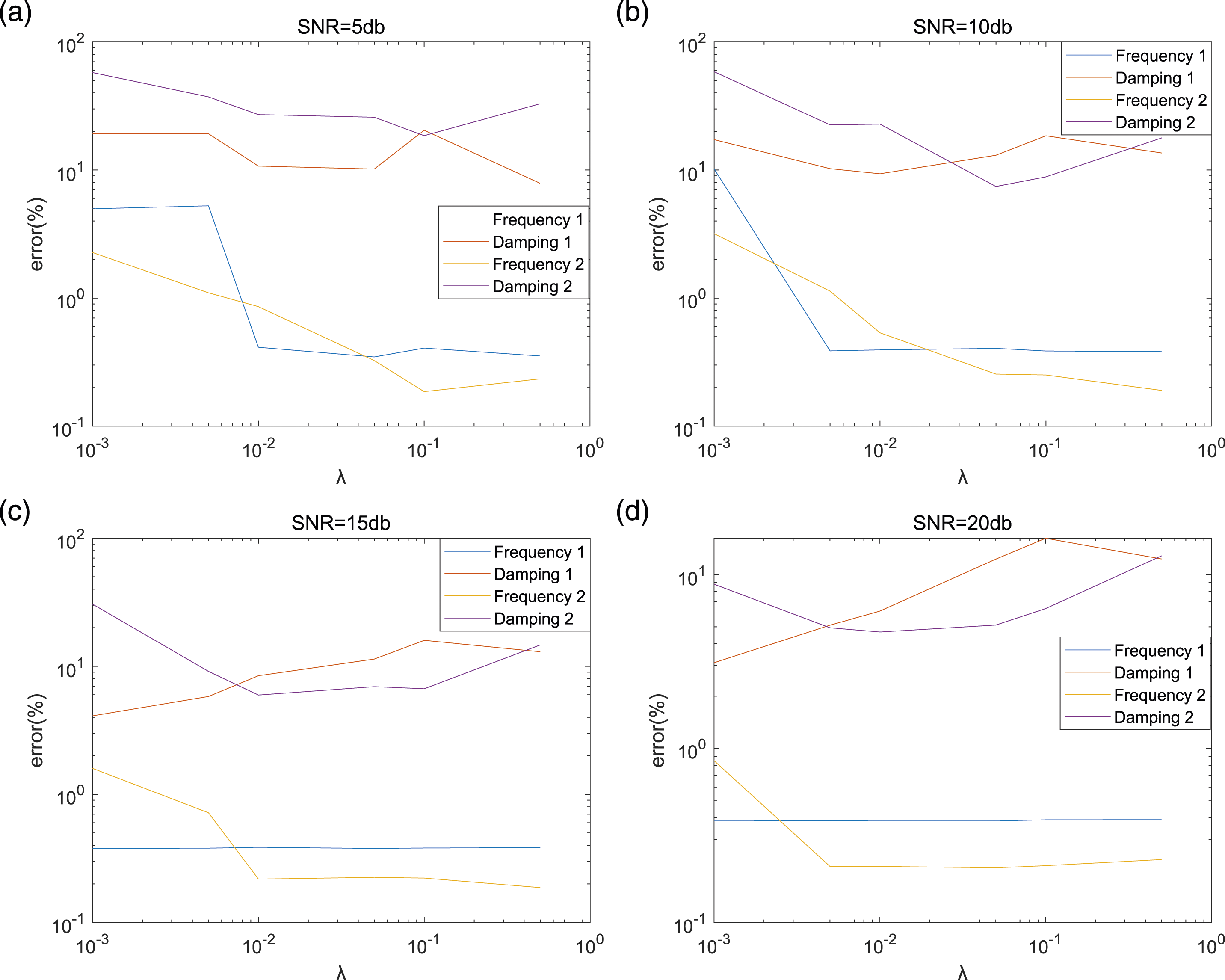
Errors in the modal parameters of the signals reconstructed with different
The error values listed in Table 3 are the averages of the results from 20 experiments performed under the same conditions, and the smallest error in each set is bolded. Under different SNR conditions, the error in the frequency between the reconstructed signal and the original signal is very small, but the damping is significantly affected by
Simulation of a three-modal signal with noise
The simulation described above confirmed that the compressed sensing algorithm can use the dictionary comprising two-dimensional Laplace wavelet family real-part functions to (i) accurately reconstruct the BTT signal and (ii) accurately estimate the modal parameters of the original signal through the matrix pencil method. Moreover, this method demonstrates good anti-noise performance. Therefore, experiments were conducted using a simulation signal containing three modals with noise to verify the effectiveness of 
Considering a sensor layout identical to that described in Section 4.1, the actual sampling rate (a) Time domain and (b) frequency domain of reconstructed three-modal signal when SNR = 15 db. Errors in the modal parameters of the three-modal signal.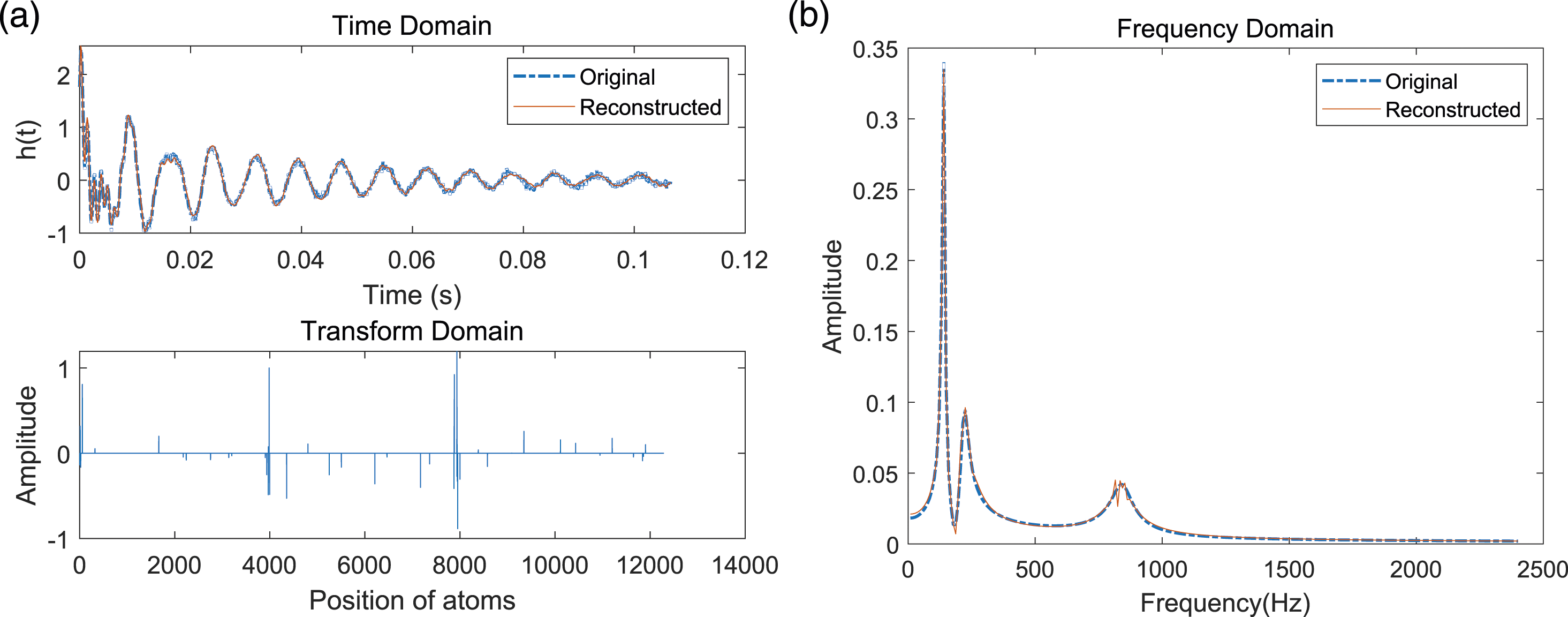

Figure 7(a) shows the reconstructed signal and highlights the atoms that were used to fit the original signal. The front portion of the attenuated signal reflects the vibrational characteristics of the signal. In Figure 7(b), the fitting effect of the reconstructed signal in frequency domain is also exact. The modal parameters of the original signal and the reconstructed signal are listed in Table 4. The frequency errors of the three modals are all <1%, and the damping errors are all <5%, thus confirming that the
Simulation without prior information
In the previous simulation experiments, it is necessary to obtain priori information to determine the parameter range of atoms in the dictionary. The advantage is to reduce the dimension of the dictionary matrix and the computational complexity. In this section, we decide to verify how well our algorithm performs without prior information.
The simulated signal is regarded as two modal signals corrupted by measurement uncertainties, as expressed in equation (32):
The sensor layout is the same as in Section 4.1, set the rotational speed (a) Time domain and (b) frequency domain of original and reconstructed signal without prior information when SNR = 10 db. Errors in the modal parameters of the signal.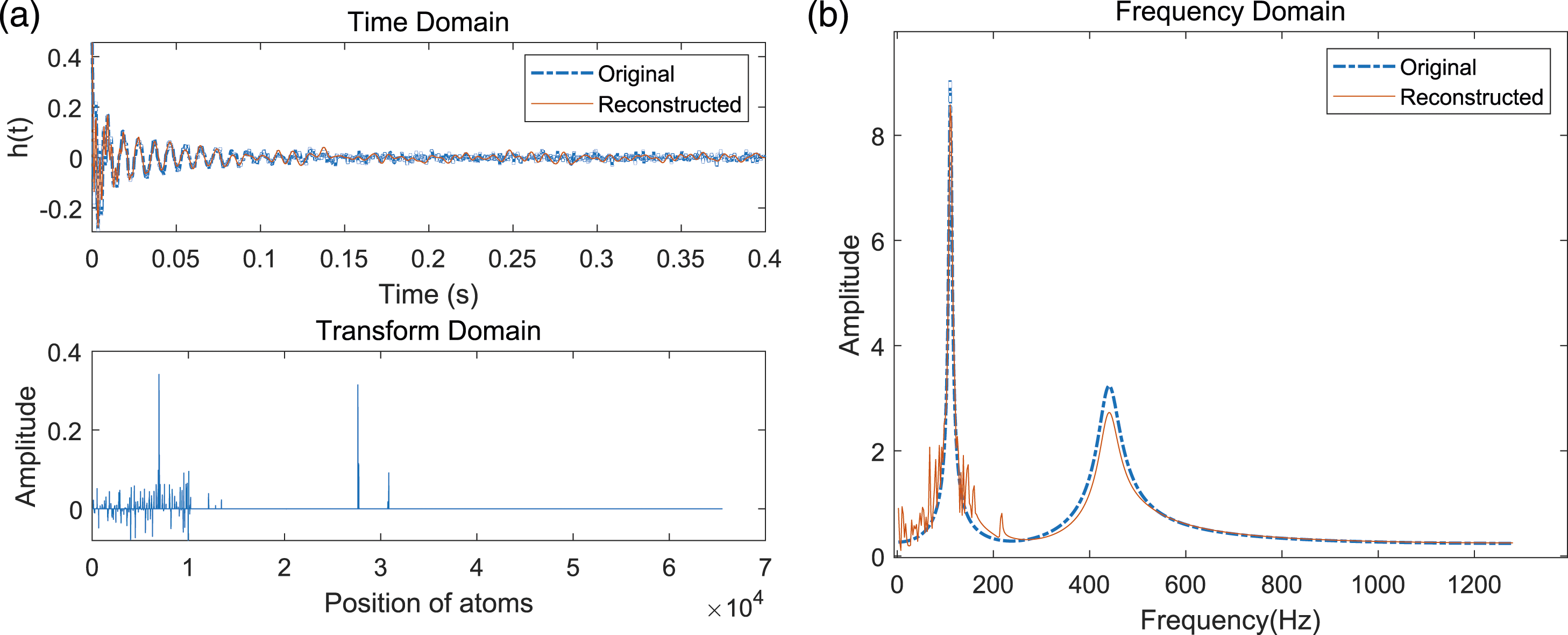

It can be seen directly from Figure 8 that the reconstructed signal tracks the original signal well in both the time domain and the frequency domain. Although some spurious modals are present (Figure 8(b)), the dominant modal is precisely identified. The modal parameter errors (Table 5) are all in a very small order of magnitude, which confirms that the algorithm is still effective even in the absence of prior information. However, as the dimension of the dictionary increases, the computing time will inevitably increase.
Experiments
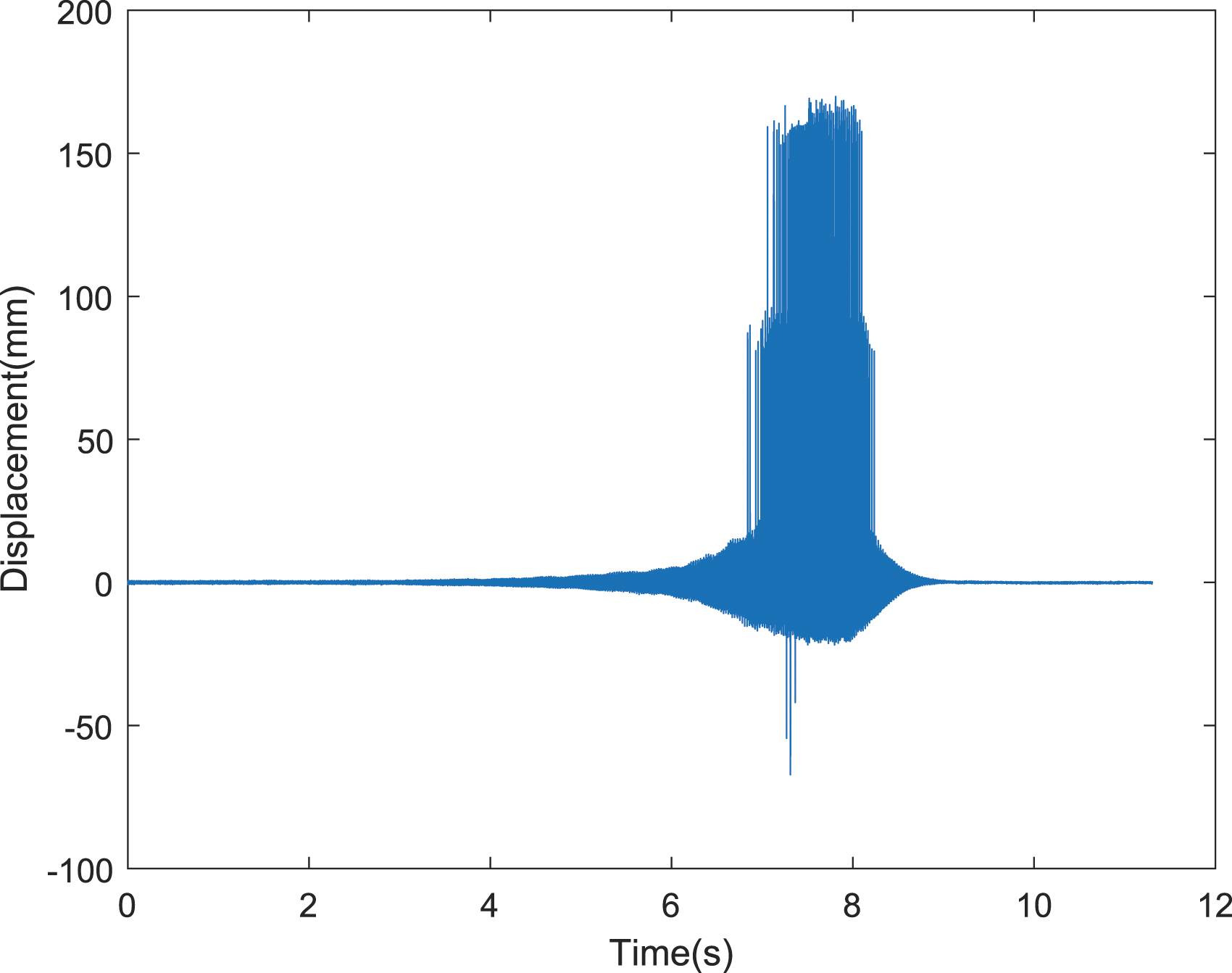
We use the data obtained from a certain type of aero-engine in the external bypass surge test to further verify the reconstruction ability of Vibration displacement of a single blade. Vibration displacement integrated from 18 blades.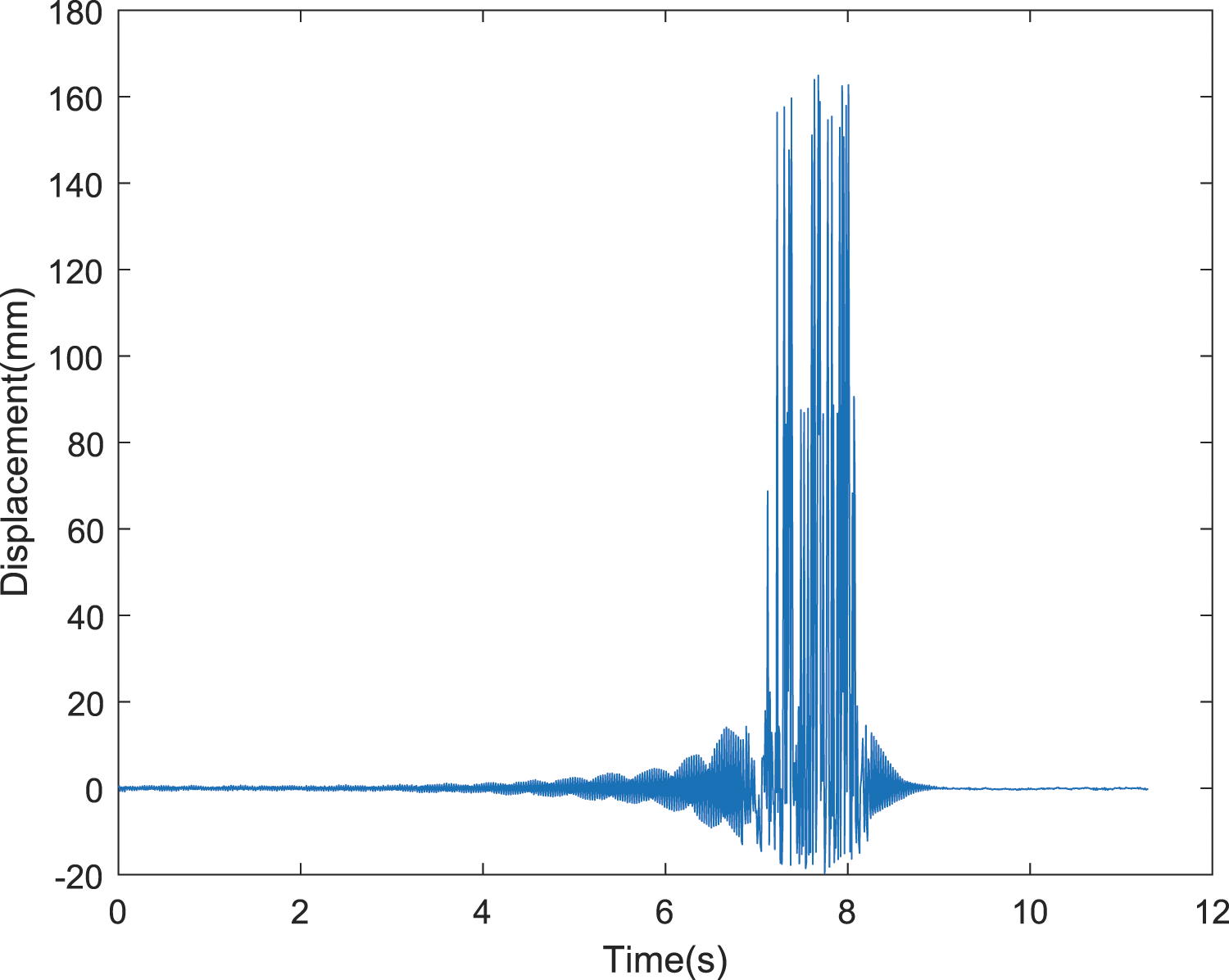
The original signal which measured by 18 BTT sensors with a length of 900 (4.35 s to 4.78 s in Figure 10) is intercepted from the divergence process, and its frequency spectrum is shown in Figure 11. It has two dominant modals of Frequency spectrum of original signal in divergence process. Frequency spectrum of under-sampled signal in divergence process. (a) Time domain and (b) frequency domain of original and reconstructed signal in divergence process. (a) Time domain and (b) frequency domain of original and reconstructed signal in convergence process. Comparison of experiment results.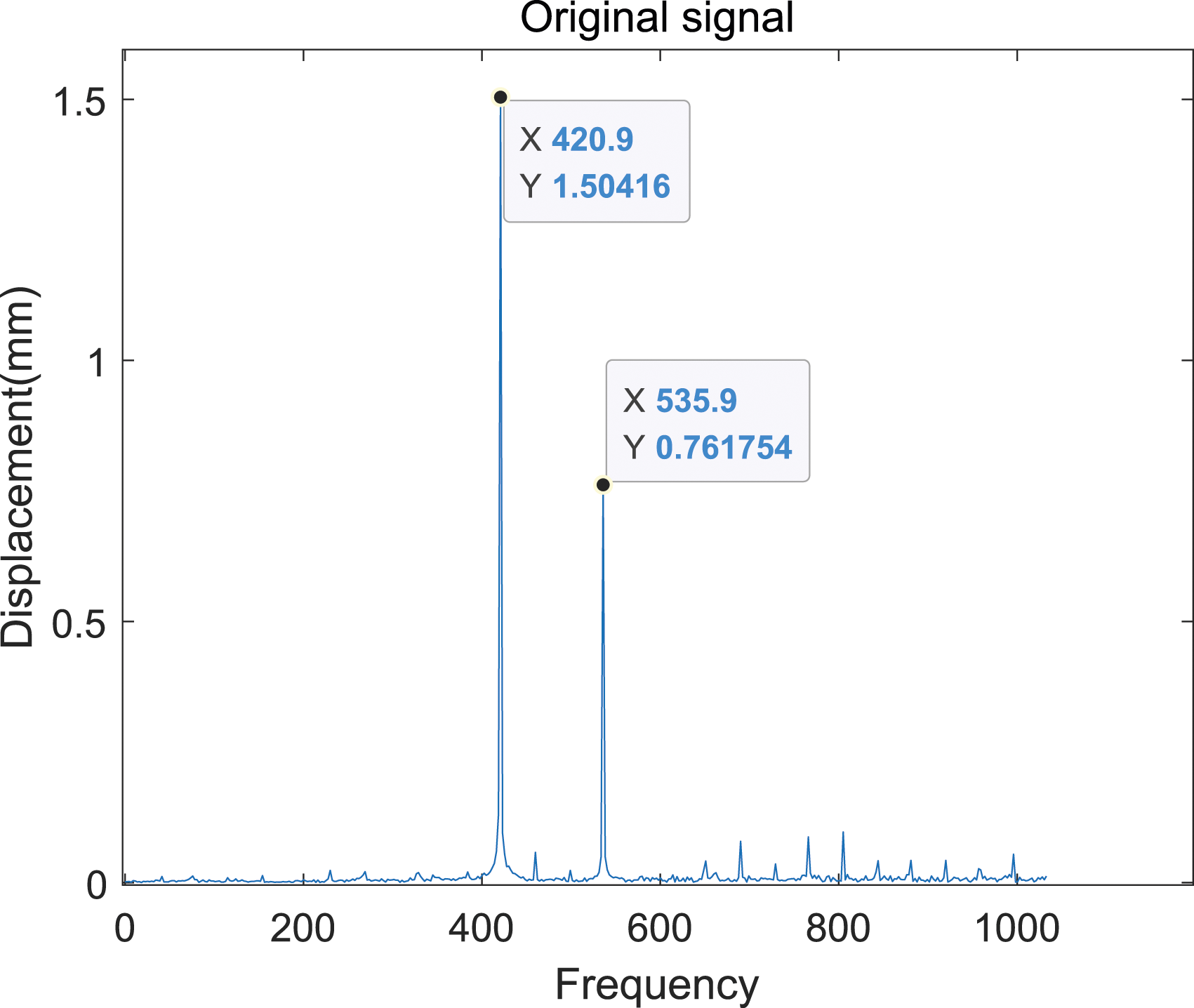
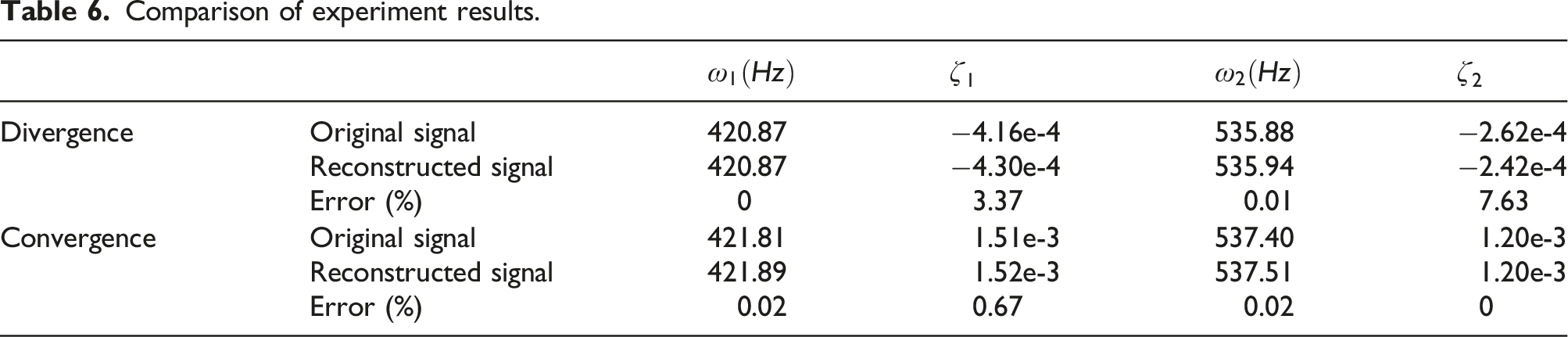
Since the non-dominant modals are not considered when designing the dictionary, the non-dominant modals are filtered out as noise during the reconstruction process. Regardless of the divergence stage or the convergence stage, the reconstruction effect of the vibration displacement signal of the blade has achieved good results, and the dominant modals are accurately reconstructed. The errors of the two parameters we care about (frequency and damping) are relatively small, which verifies
It's interesting to consider whether the (a) Time domain and (b) frequency domain of original and reconstructed signal with 2 sensors in divergence process. (c) Time domain and (d) frequency domain of original and reconstructed signal with 4 sensors in divergence process. Modal parameter identification results in divergence process using 4 sensors.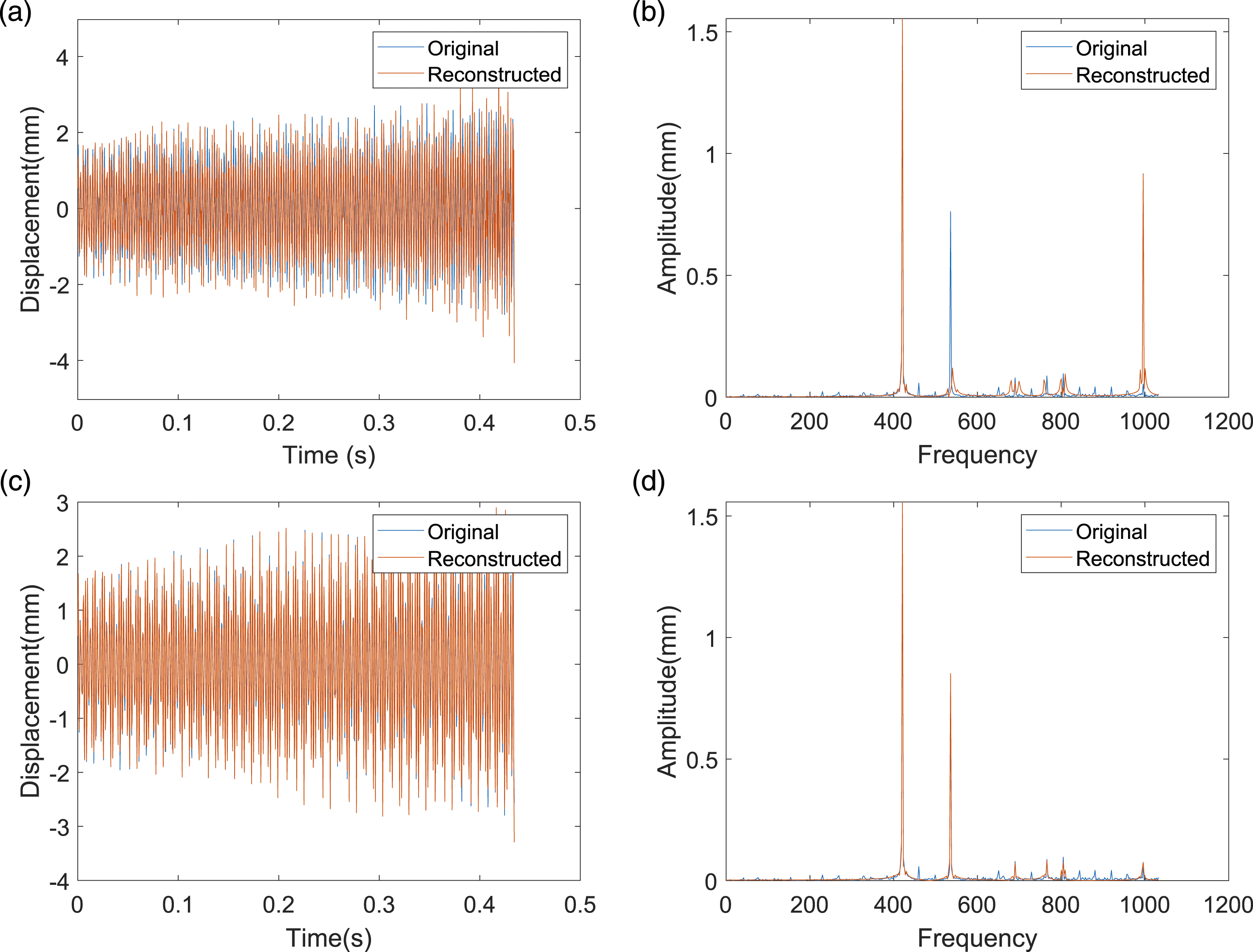
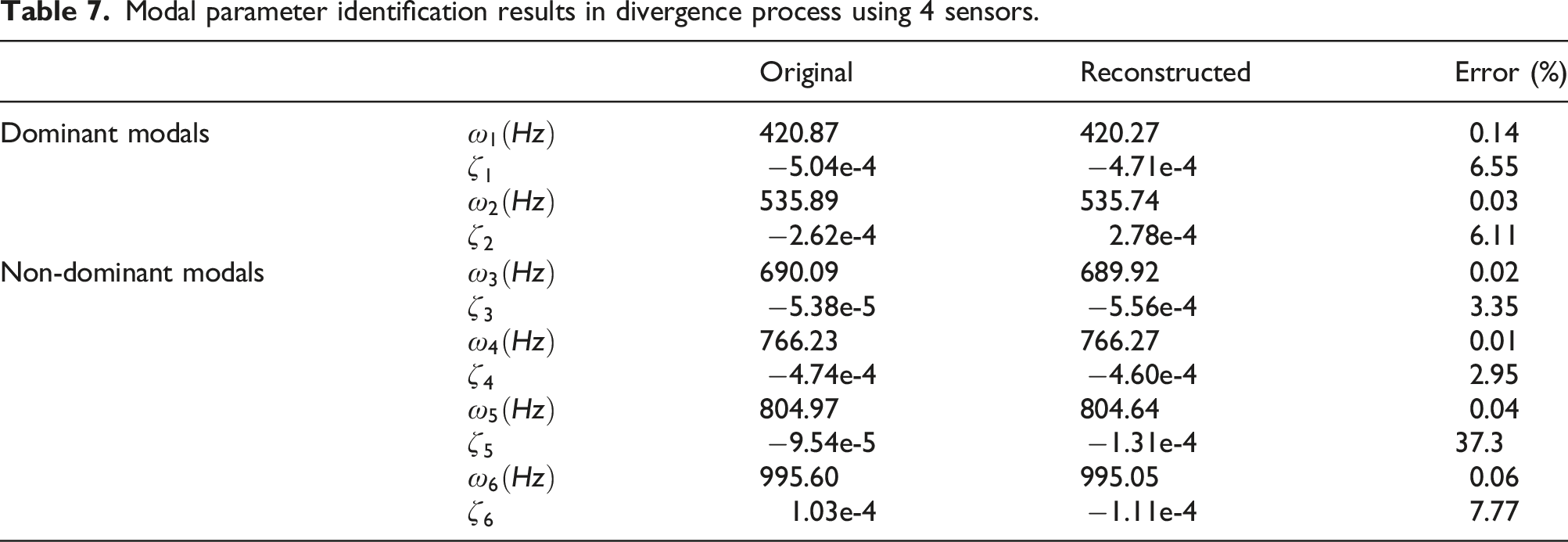
Figure 15 illustrates that when we focus on six modals, just two sensors cannot be used to accurately reconstruct the signal, and there are too many atoms to prevent the major modals from being reconstructed. The total power of the reconstructed signal is virtually the same as that of the original signal, according to the time-domain figure.
Combining Figure 15(d) and Table 7, it can be shown that the reconstructed signal's spectral peaks for modal 1 and 2 are marginally greater than those of the original signal. The reconstructed signal's modal 3 and modal 4 spectral lines essentially match those of the original signal. The spectral peak of modal 5 in the reconstructed signal is closer to the original signal, but it produces two spurious modals near 804Hz, which makes the estimated value of
Conclusions
This study aimed to comprehensively estimate the structure modal parameters of rotating machinery blades. Based on compressed sensing theory and blade tip timing technology, a new reconstruction method 1) In the field of BTT, the research on damping blade vibration is insufficient. This research studies on damping blade vibration signal, and proposes a BTT sampled damping signal reconstruction method 2) This research proposes the 3) When the modals of the structure response signal match the atoms in the dictionary, the signal has the greatest sparseness in the transform domain, and the 4) 5) 6) In the conducted experiment, the complete signal can be recovered from the under-sampled BTT signal, then the modal parameter could be accurately estimated by the matrix pencil method. 7) The
Supplemental Material
Supplemental Material - A modal estimation method of rotating blade based on compressed sensing and blade tip timing
Supplemental Material for A modal estimation method of rotating blade based on compressed sensing and blade tip timing by Hua Zheng, Guanyu Fang, Zhenglong Wu, Shiqiang Duan, and Jiangtao Zhou in Journal of Low Frequency Noise, Vibration and Active Control
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds for the Central Universities (Grant no. 31020190MS702) and National Science and Technology Major Project (2017-V-0011-0062).
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.