
Abstract
This work studies a two degrees-of-freedom (DOF) dynamical system whose governing system is solved analytically using the multiple scales approach (MSA). The solvability requirements are obtained in light of the elimination of secular terms. All resonance states are classified to understand the equilibrium of the dynamical system. Two of them are examined in parallel to get the associated equations for the system’s modulation. All probable fixed points are identified at the states of stability and instability using the criteria of Routh-Hurwitz (RH). The curves of resonance and the system’s behavior during the motion are plotted and analyzed. The numerical solutions (NS) of the governing system are obtained using the method of Runge-Kutta fourth-order, and they are compared with the analytical solutions (AS). The comparison reveals high consistency between them and proves the accuracy of the MSA. To determine the positive effects of different parameters on the motion, stability zones are studied from the perspective of their graphs. The applications of such works are very important in our daily lives and were the reason for the development of several things, including protection from earthquakes, car shock absorbers, structure vibration, human walking, television towers, high buildings, and antennas.
Introduction
Many scientific works have examined different perturbation methods, as they are important in solving many problems for nonlinear equations for which exact solutions are not possible. A class of analytical methods known as perturbation techniques can be used to determine AS. These methods are used to illustrate and investigate vibrating phenomena in some systems resulting from nonlinear sources.1,2 Therefore, special attention has been paid to one of the perturbation methods, which is the MSA, because it is one of the most important perturbation methods and is very helpful in systems with different time scales, like oscillators with weak dissipation.3,4 The actual importance of these methods is seen in solving the governing mathematical systems of mechanical structures. When exposed to external disturbances, all mechanical systems exhibit vibrational responses, with undesirable vibrations potentially harmful in many engineering applications.5,6 As a result, mechanical vibration control is considered one of the most important topics, and interesting research has been conducted in this field over the last few years. 7
The RH criteria are used to examine the essential and adequate requirements for the stability characteristics of dynamical systems. 8 Applying these criteria, which were studied in,9,10 we can examine the stabilities and instabilities of any control system. However, if these requirements are met, the control system may or may not be stable. Therefore, adequate requirements are useful for estimating whether or not the control system is stable.9,10 Vibrational motions can be studied by transforming the motion into equations that may be solved, studying their stability areas and the responsibilities of various parameters of the solution to find the best possible solutions.11–13 The vibrational motions are noted in the movement of some pendulums on various trajectories and many other examples in daily life.14–18
It should be highlighted that many researchers have become interested in the movement of damped elastic pendulums along various pathways.19–29 In Ref. [19], the approximate solution of the nonlinear controlling equations of this pendulum with a vertically oscillating pivot point is explored. In an analogy, Ref. [20] examines the planar rotary movement of a mathematical pendulum whose hinge point vibrates horizontally and vertically. The provided solutions’ reliability and effectiveness are proven. However, in Ref. [21], the authors investigate the rotating motions of the hanging point of a spring pendulum on a restricted Lissajous curve around resonance instances. A few limited scenarios for specified motions are provided. In Ref. [22], the authors looked at how a 3DOF dynamical system moved in the plane of a decelerated longitudinal spring attached to a rigid body, in which the hanging point is regarded as fixed. When the hanging point rotates in an elliptic path, the extension of this issue was investigated in Ref. [23]. In Refs. [24] and [25], the rigid body pendulum is further described. Utilizing the MSA, which achieves the necessary equations of modulation in perspective of the solvability constraints, the approximations were obtained. Different movements of an oscillating system subjected to harmonic forces and moments are explored in Refs. [26–29] along with the nonlinear stability analysis for these movements.
Using Caputo-Fabrizio’s, 30 a gold nanobeam’s vibration is explained by the strain theory of thermo-elasticity fractional-order in various works, for example , Refs. [31, 32]. According to the different values of the electrical voltage and electrical resistivity, numerical results are obtained and represented graphically.
The methodology of non-perturbative goes back to El-Dib,33–37 in which the solutions of nonlinear differential equations (NDE) were obtained. In Ref. [33], this methodology was applied to a damped third-order NDE. In comparison to the numerically precise solution, the quick-estimated solution is modeled. The solution of a damped quadratic-cubic nonlinear oscillator was studied in Ref. [34]. The precision of this solution is confirmed using the approach of homotopy up to first-order, in which the frequency formula imposes the stability requirements. The motion of a non-slide, homogenous, rigid rod over a solid annular surface was investigated in Ref. [35]. Moreover, new outcomes for a damped nonlinear Duffing oscillator and a Klein-Gordon equation were examined in Ref. [36]. The stability and instability areas were presented according to the influence of the problem’s acting parameters. A solution of forced non-conservatively coupled nonlinear oscillators through a simple procedure was examined in Ref. [37].
In Ref. [38], the authors present the possible nonlinear interior resonances of an arch formed by a micro-electromechanical system when activated by static and dynamic electric forces. Using the MSA and a direct attack on the governing system of motion, the situations of one-to-one and three-to-one internal resonances are examined. The stability of an imbalanced composite shaft is simultaneously addressed in Ref. [39] along with the effects of asymmetry and geometrical non-linearity. Hamilton’s principle has been applied to generate parametrically excited equations of motion, in which the inequalities in the lateral shaft bending stiffnesses in these equations lead to parametric excitations. The numerical solution of the two coupled equations of Klein-Gordon is examined in Ref. [40]. Therefore, the stability method of Von Neumann is demonstrated to show that the applied method is stable conditionally. Based on the moment and exponent of Lyapunov, linear systems with 2DOF are examined 41 when a parametric excitation is applied. In the case of tiny intensity noises, the precise asymptotic expressions for these exponents are found using the regular perturbation approach.
The homotopy perturbation method (HPM) is considered an important perturbation method that can be utilized in the solution of various differential equations, 42 and it is used in Refs. [43] and [44] to deal with the vibrating motion of dynamical systems. These solutions are compared with the numerical ones to demonstrate the high accuracy of this method. In Ref. [45], the authors examined the movement of a pendulum, which is linked to a controlled spinning wheel by a thin spring. In Ref. [46], the examinations of a few non-conservative oscillator cases are examined. Also, the adjustment of this method has substantially simplified the solutions for conservative oscillators. The effectiveness of the HPM for various oscillators is investigated in Ref. [47] where a Duffing oscillator is presented to describe the solution. Whereas He’s multiple scales method 48 combines the HPM and MSA in the conventional perturbation procedure. It has been demonstrated that this method is an effective tool for solving a number of differential equations. The solution of the time-periodic delayed Mathieu equation is investigated in Ref. [49] applying the version of homotopy perturbation with time scales.
In this paper, a dynamical system with 2DOF is studied, and the MSA is used to solve the governing system analytically. The Runge-Kutta fourth-order approach is used to generate the NS of the governing system, which are then compared to the AS. The comparison demonstrates remarkable consistency between them and validates the MSA’s strong accuracy. In light of the removal of secular elements, the solvability conditions are obtained. To comprehend the dynamical system equilibrium, all resonance states have been categorized. To obtain the corresponding equations for the modulation of the system, two of them are investigated simultaneously. The RH criteria are used to determine every possible fixed point in the stable and unstable states. Resonance curves, the motion behavior of the system, and stability/instability zones are plotted and examined, in view of the values of the system’s physical parameters. The applications of the present problem are highly significant in our daily lives, such as in the reduction of vibrations due to earthquakes, in the development of resistant cars, and in preventing harmful vibrations in high buildings to some extent. In addition to its applications in human walking, television towers, tall buildings, and antennae.
Model and perturbation analysis
This section presents the investigated dynamical system, an analysis of the MSA to obtain the AS up to a desired order of approximation, and the system’s solvability criteria. Therefore, the following governing equations of motion describe the movement for a forced oscillation of this system,
50
with simple quadratic nonlinearities under the influence of gyroscopic forces, and an external harmonic force


In Ref. [51], the amplitude-frequency formulation for nonlinear oscillators is used to discover that the quadratic nonlinear force contributes to the pull-down phenomenon in each cycle of the periodic motion and that the pull-down instability occurs when the force reaches a critical magnitude.
It is important to introduce the functions

Based on MSA, the AS


The coefficients

Substituting (3)–(5) into (1) and (2) and comparing the coefficients of the like powers of
Order of


Order of


Order of


To solve the previous partial differential equations (7)–(12) sequentially, we begin by formulating the general solutions of (7) and (8) as


The use of the solutions (13) and (14) into the PDE (9) and (10) and the elimination of the producing secular terms from the result, yield the following conditions:

Due to (15), we can formulate the second-order solutions as follows:


The symbol
To determine the third approximations’ solvability criteria, substitute (13), (14), (16), and (17) into (11) and (12), and then remove the resulting secular terms to obtain


These conditions lead to the following form for the third-order approximations
Resonance analysis
We focus our investigation in this section on classifying the cases of resonance that might occur in orders two and three of approximation. When any of their denominators reaches zero, the solutions (16), (17), (20), and (21) fail. It is caused by the appearance of the secular terms in (9)–(12) when certain frequency terms are fulfilled.
52
The resulting cases are summarized in two situations as follows (i) Primary external case of resonance at, (ii) Internal case of resonance at
It is important to note that the stability requirements for the resonance and non-resonance situations have been investigated in Ref. [53] for a forced Duffing-Van der Pol oscillator in a fractal space.
The studied system’s behavior will be difficult to predict if one of the above-mentioned cases is investigated.
54
Therefore, we must modify our technique, and consequently, we must investigate the primary external and internal resonances that occur concurrently to solve this issue, that is,

As a result, we can express as follows
56

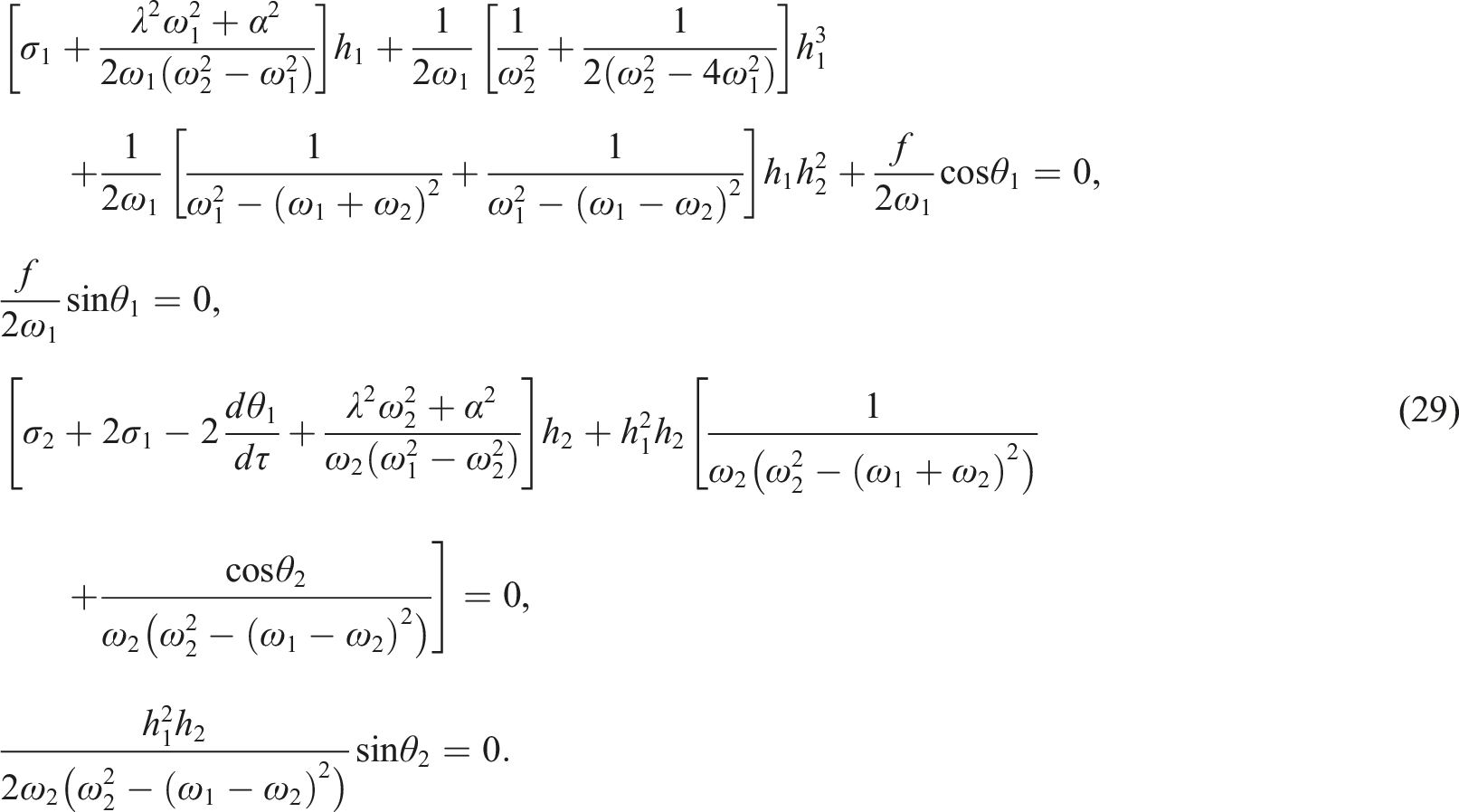
By using (22) and (23) into (9)–(12) and neglecting the produced secular terms, the conditions of solvability are attained as follows
For the second-order equations

For equations of third-order

Solvability conditions are represented by the above formulas, as in equations (24) and (25). For further consideration, we present the unidentified functions

Considering the following adjusted phases

Substituting (26) and (27) into (25) yields the below four first-order modulated equations for the examined resonance cases
Consider the below list of the parameters’ values

The NS of the above modulation system (28) can be graphed as in Figures 1–5. These figures describe the variation of The behavior of The behavior of 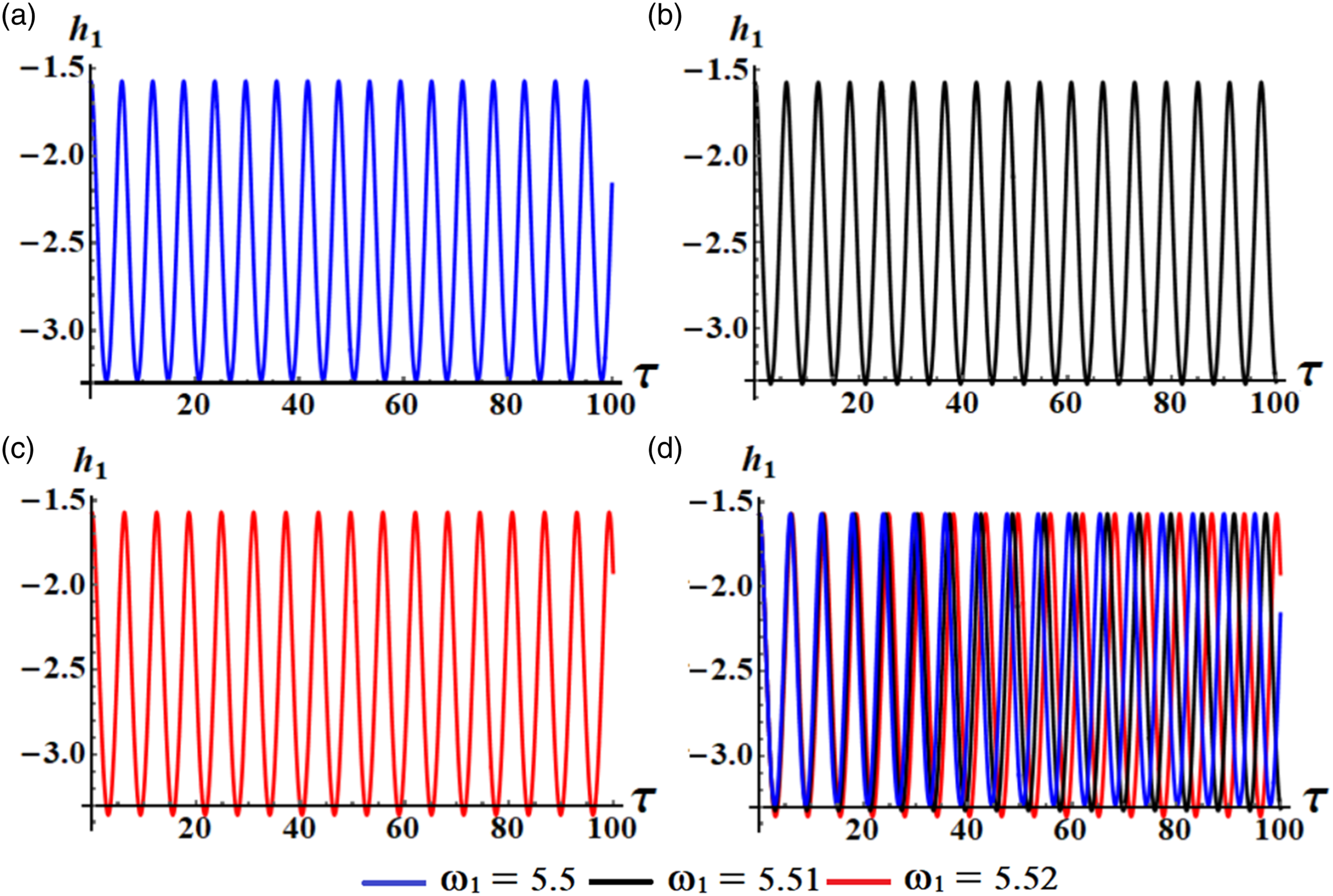
The time histories of the adjusted amplitude
The time variations of the adjusted phases The positive effect of 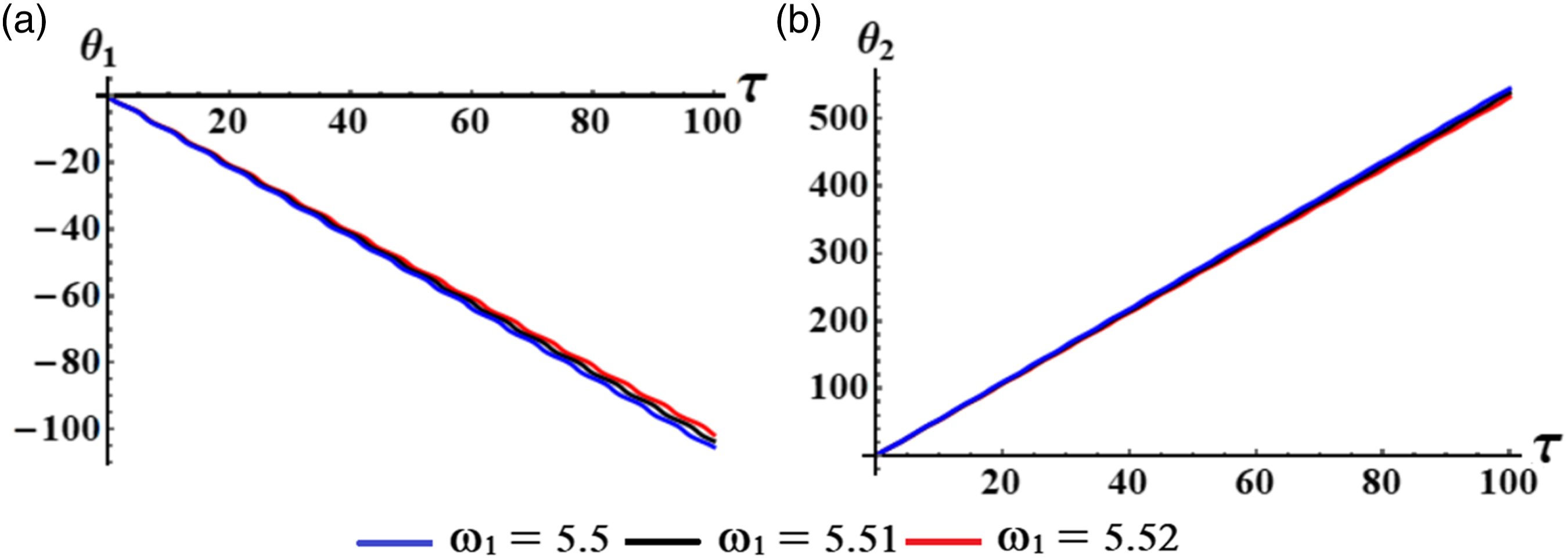
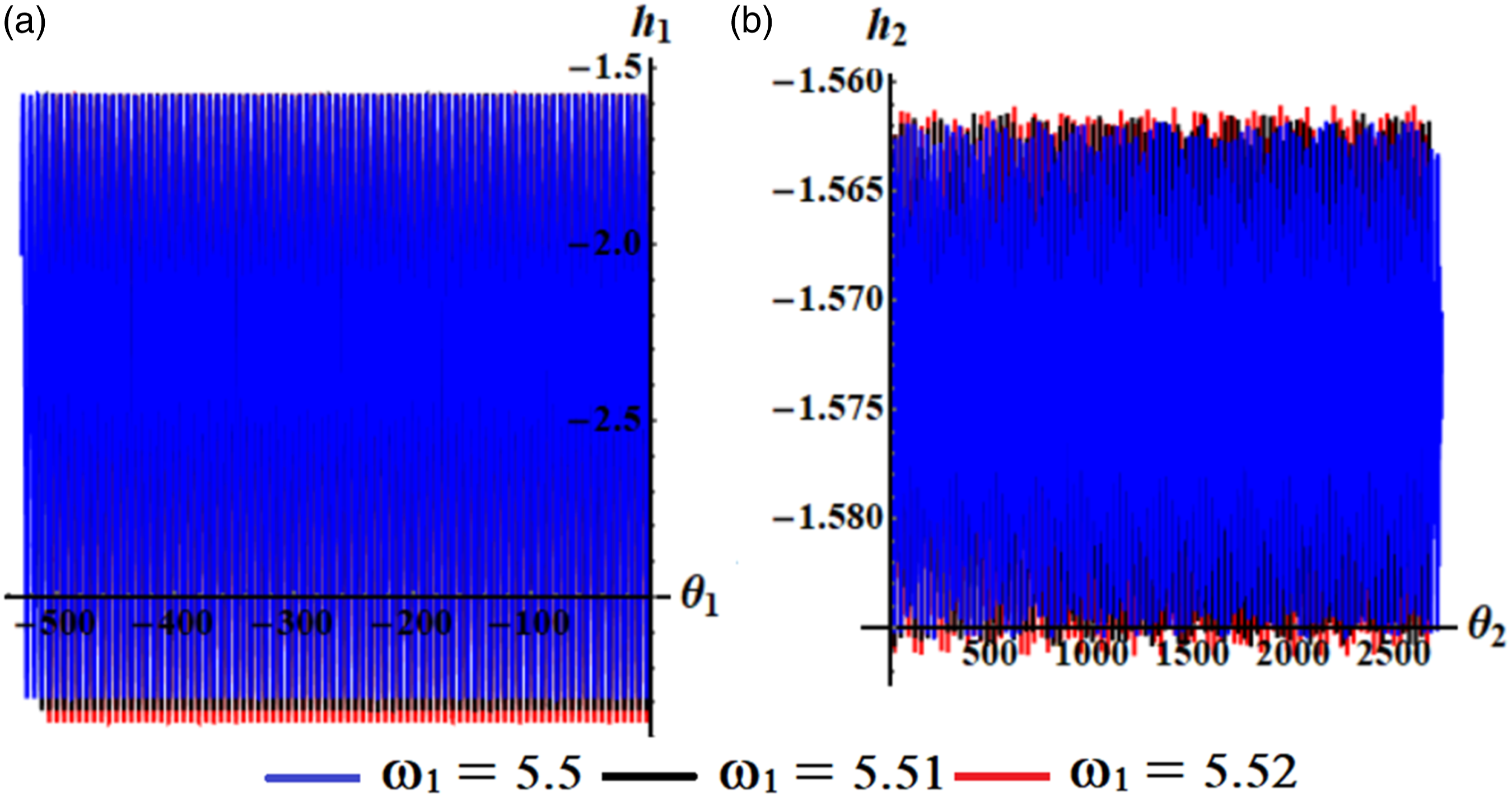
The projections of the amplitude and adjusted curves on the planes The drawn curves of system (28) in the plane The drawn curves of system (28) in the plane 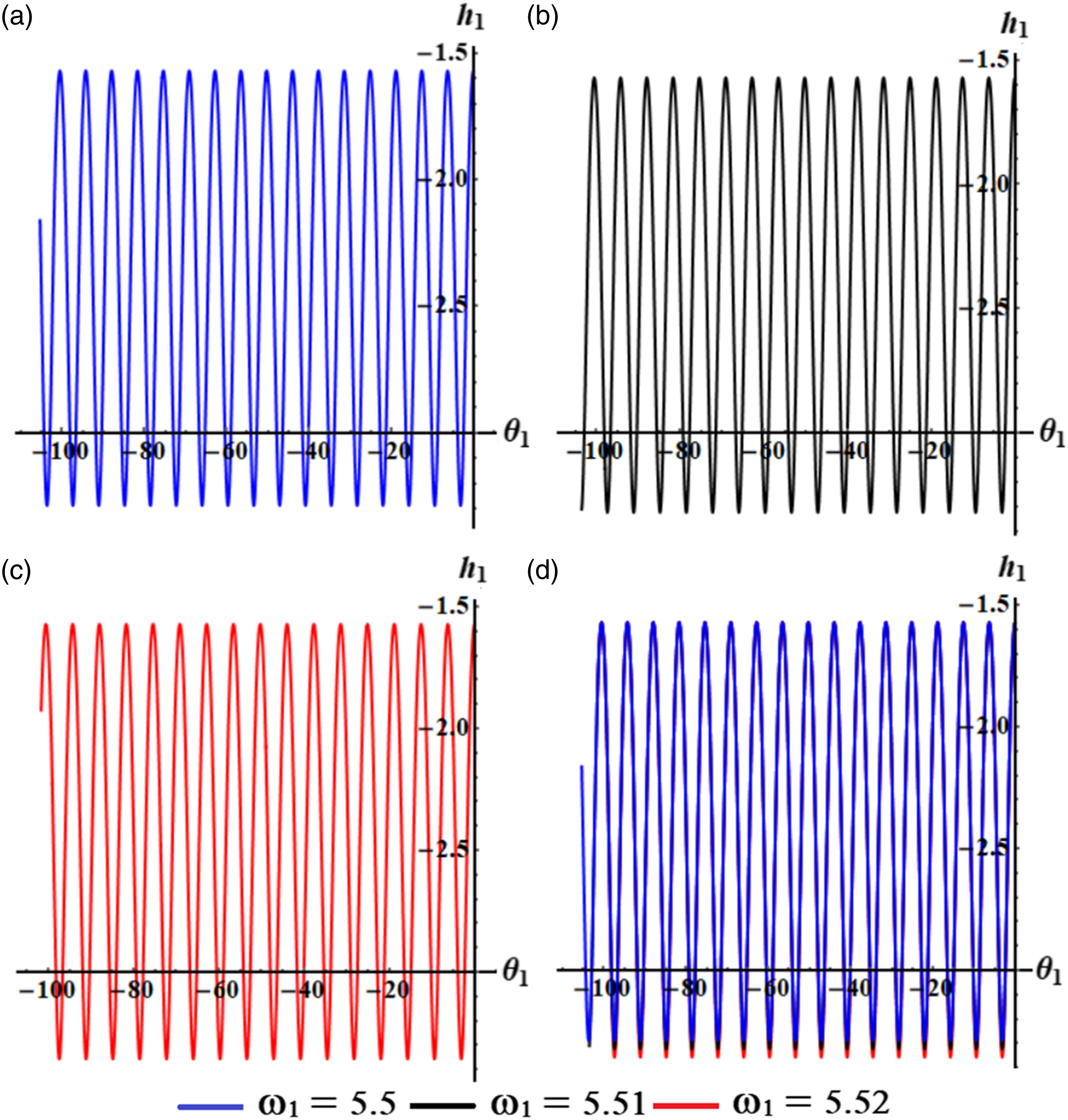
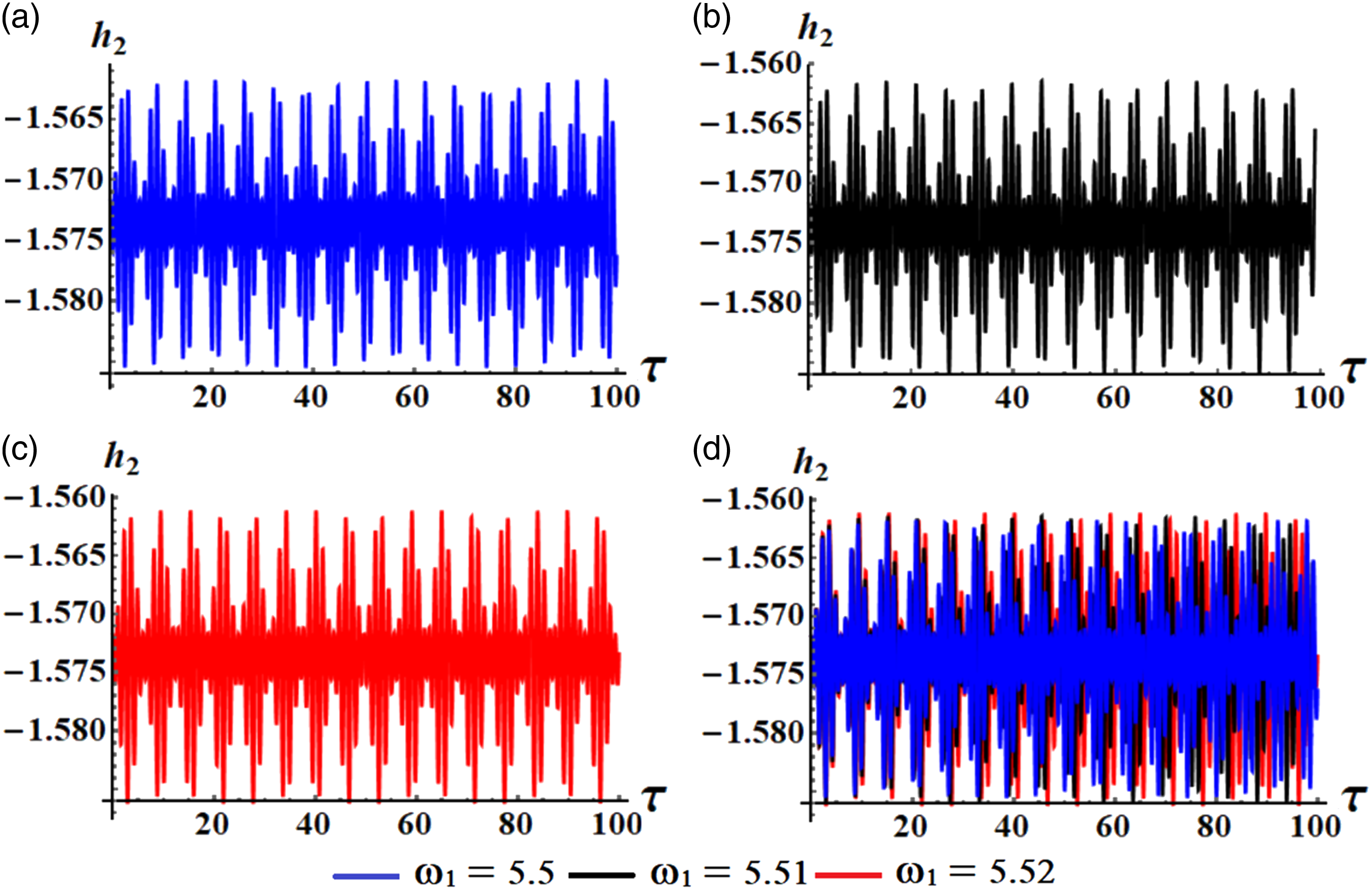
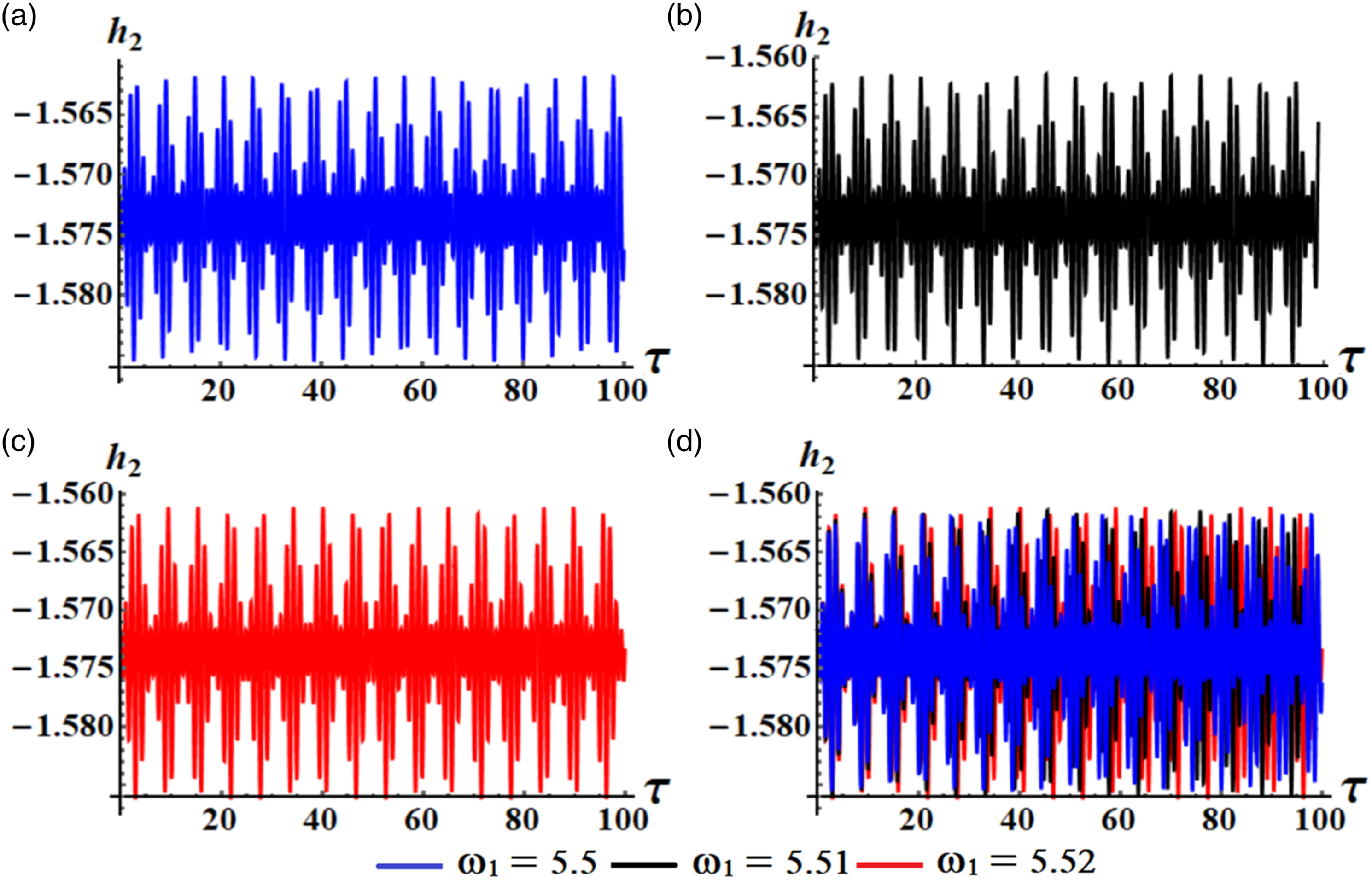
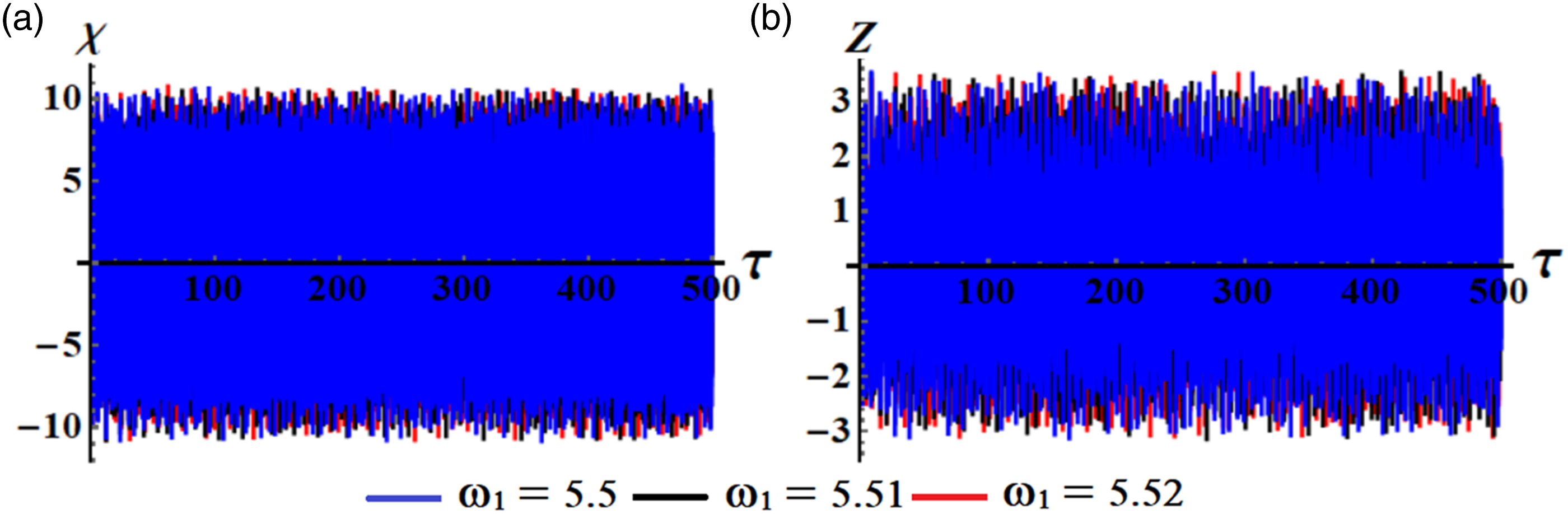
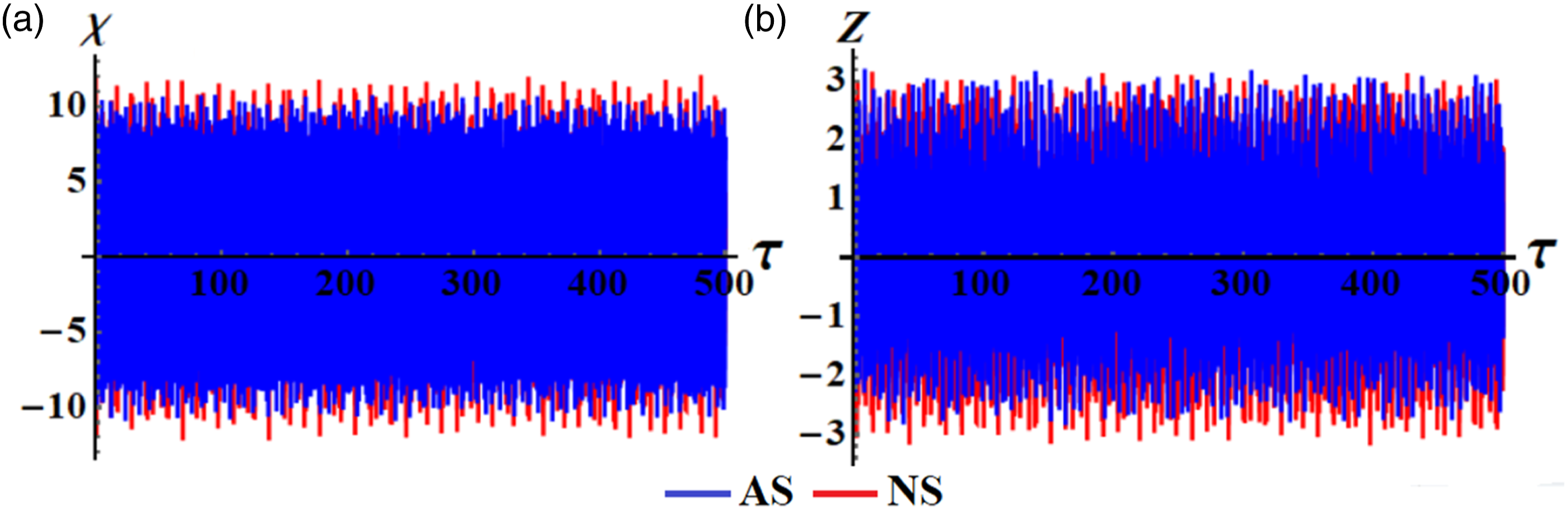
The temporal histories of the AS for the functions The solution The solution 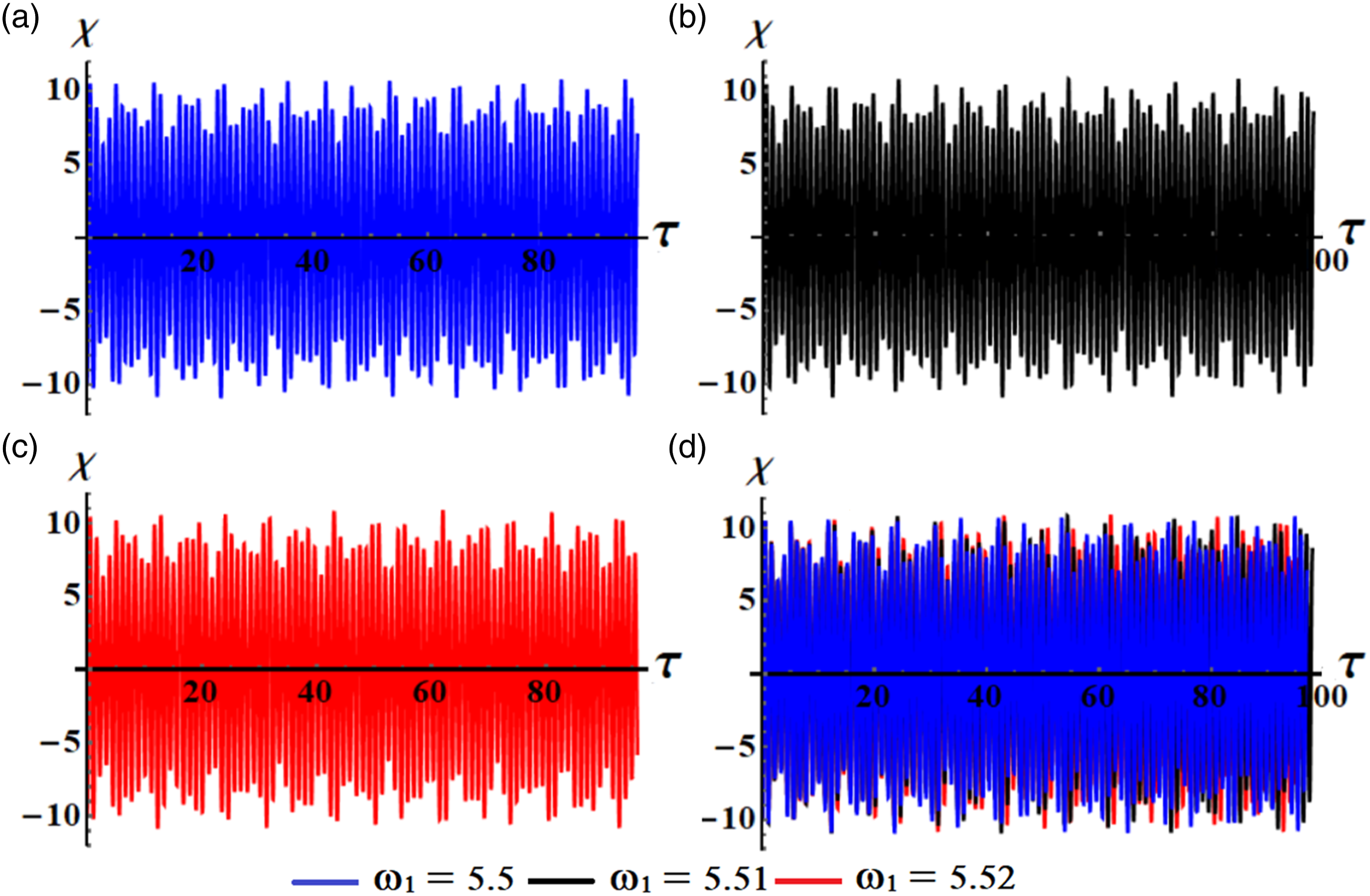
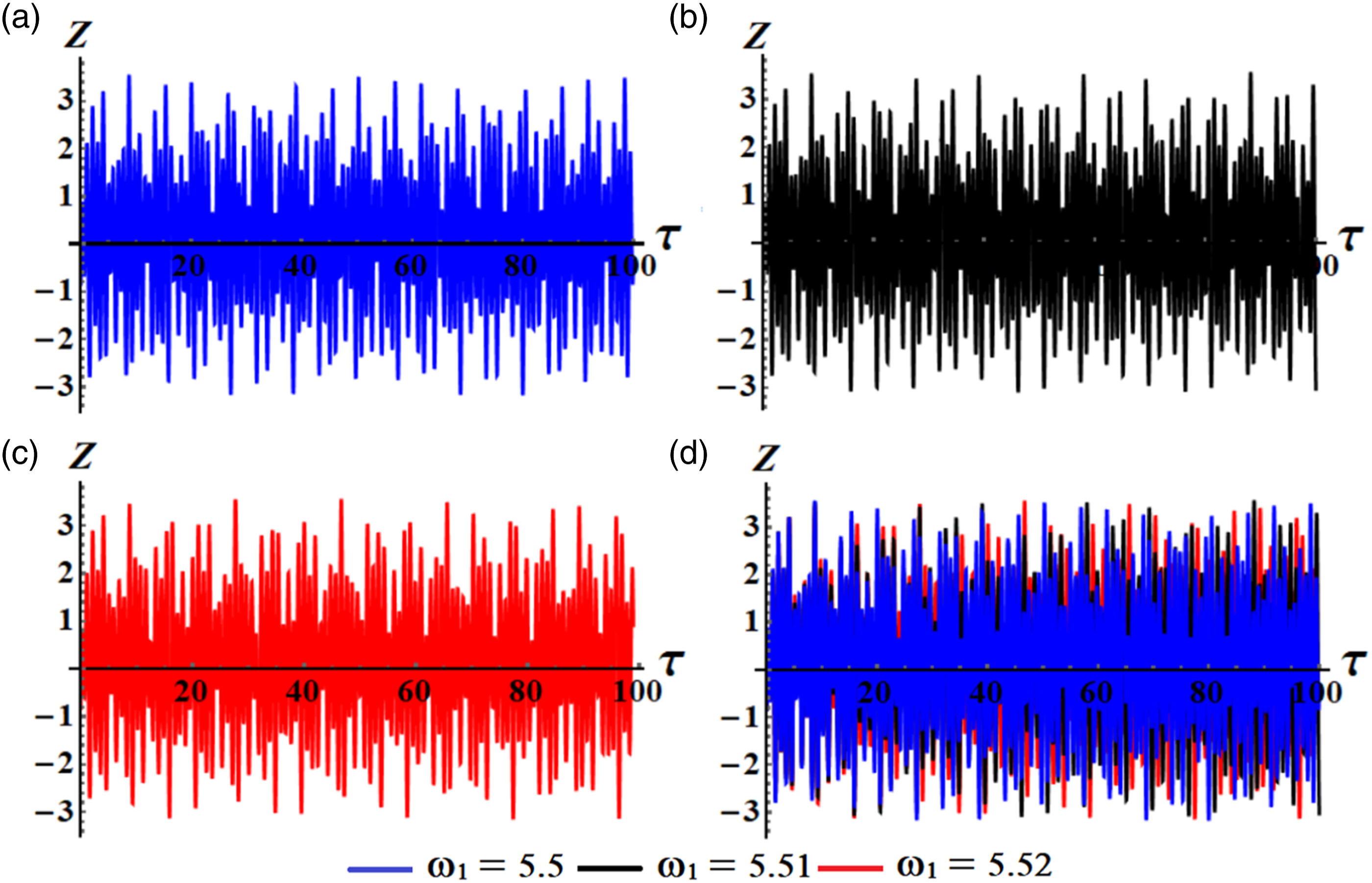
To study the behavior of the adjusted amplitudes The time behavior over the whole interval for: (a) the amplitude The curves for the time domain The variation of the solutions The consistency between the AS and NS when 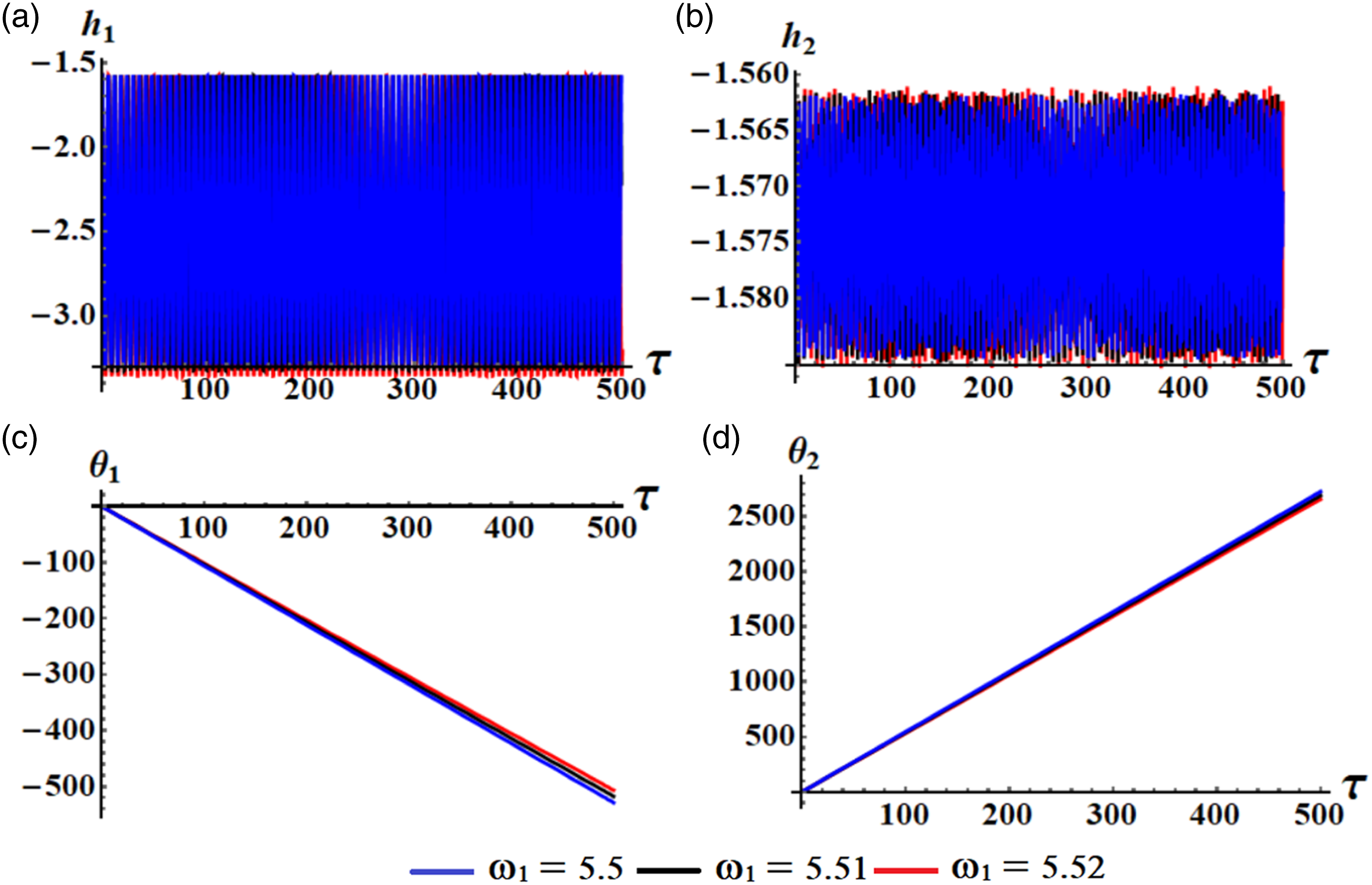
The solutions of steady-state case
The goal of this section is to examine the steady-state scenario for the system under consideration. Therefore, we consider

For evaluating the stabilities of the solutions, according to this case, in a region close to the fixed points, we substitute the following forms
58
into (28)

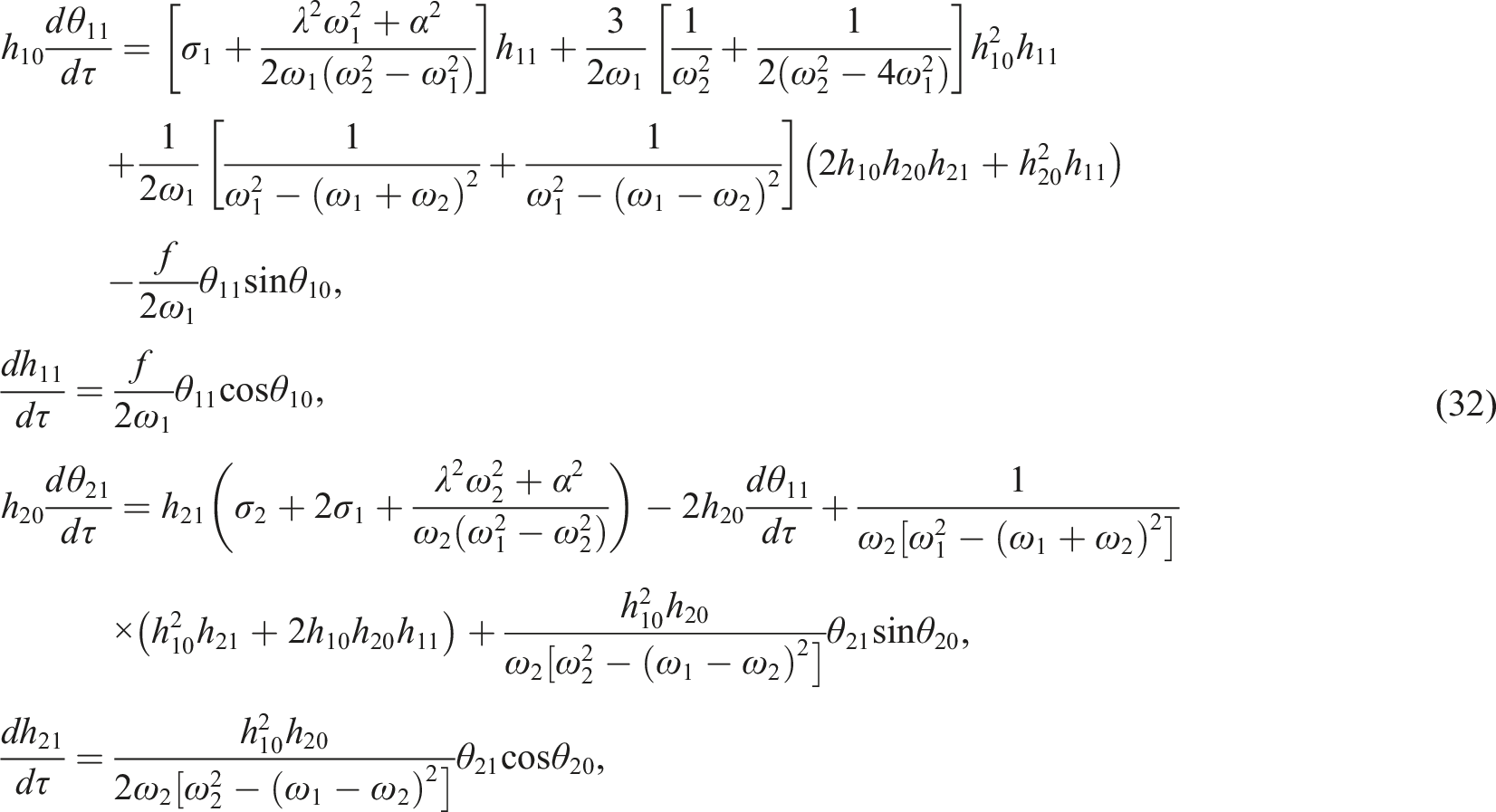


The necessary stability conditions for the solutions at the steady’s scenario can be provided by the RHC as follows
59

The properties of the stability
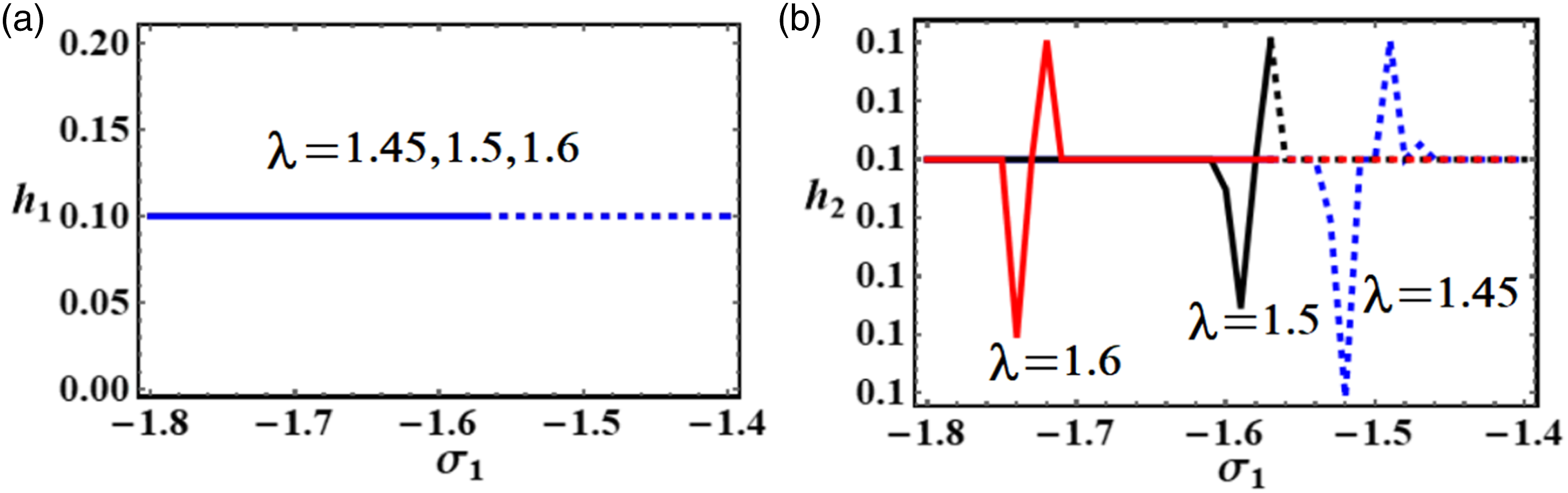
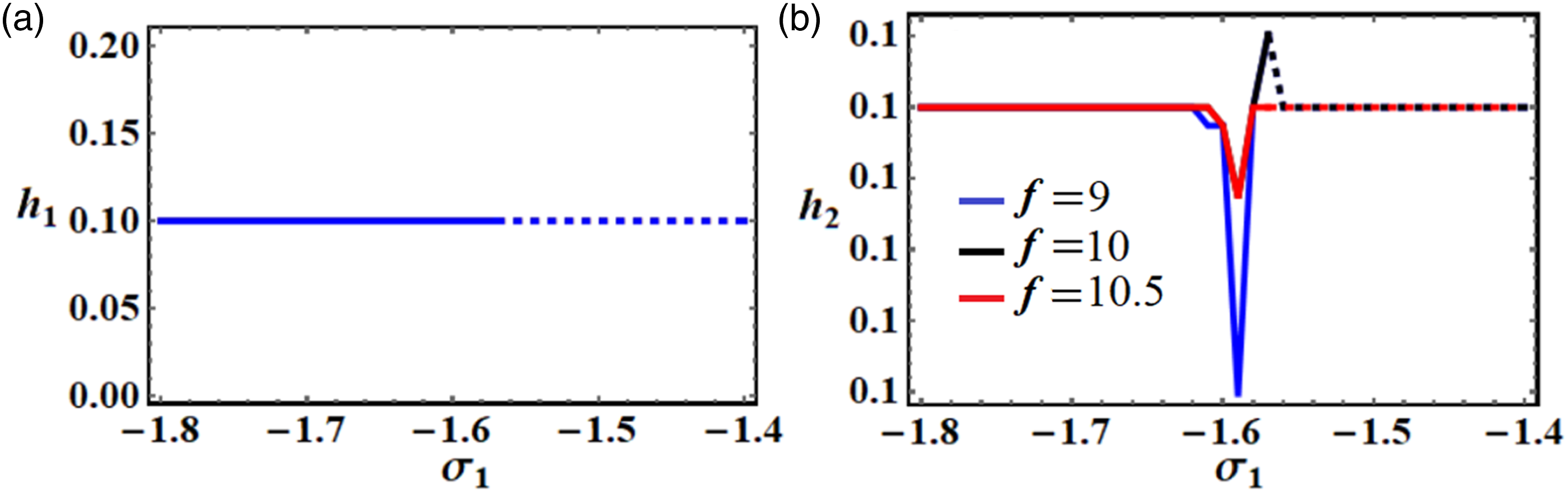
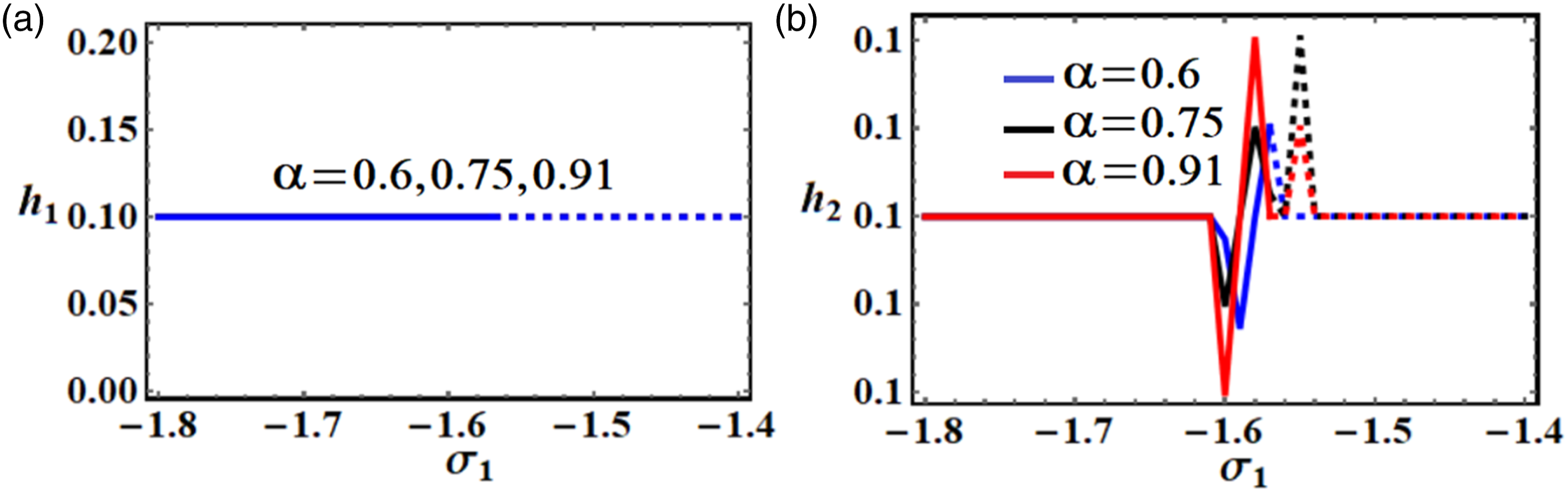
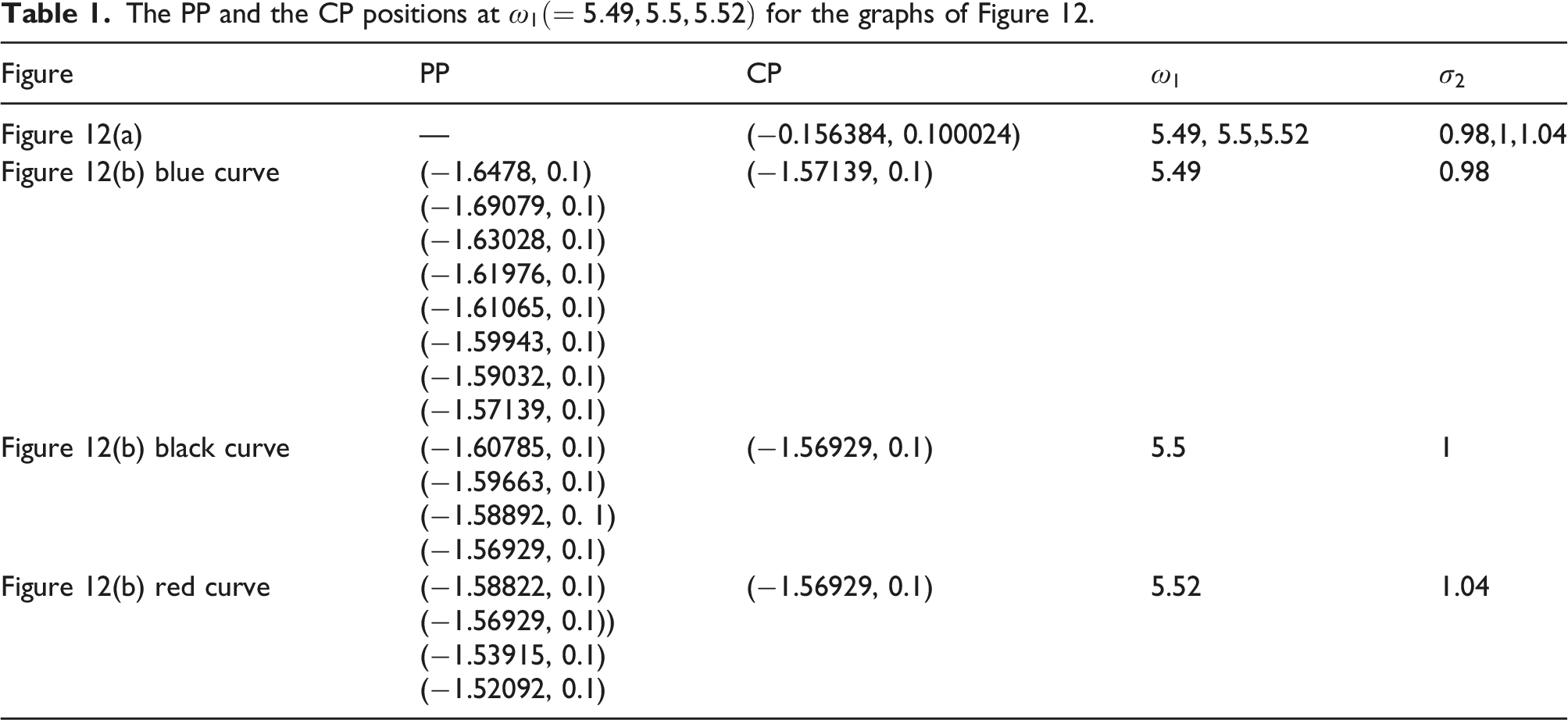
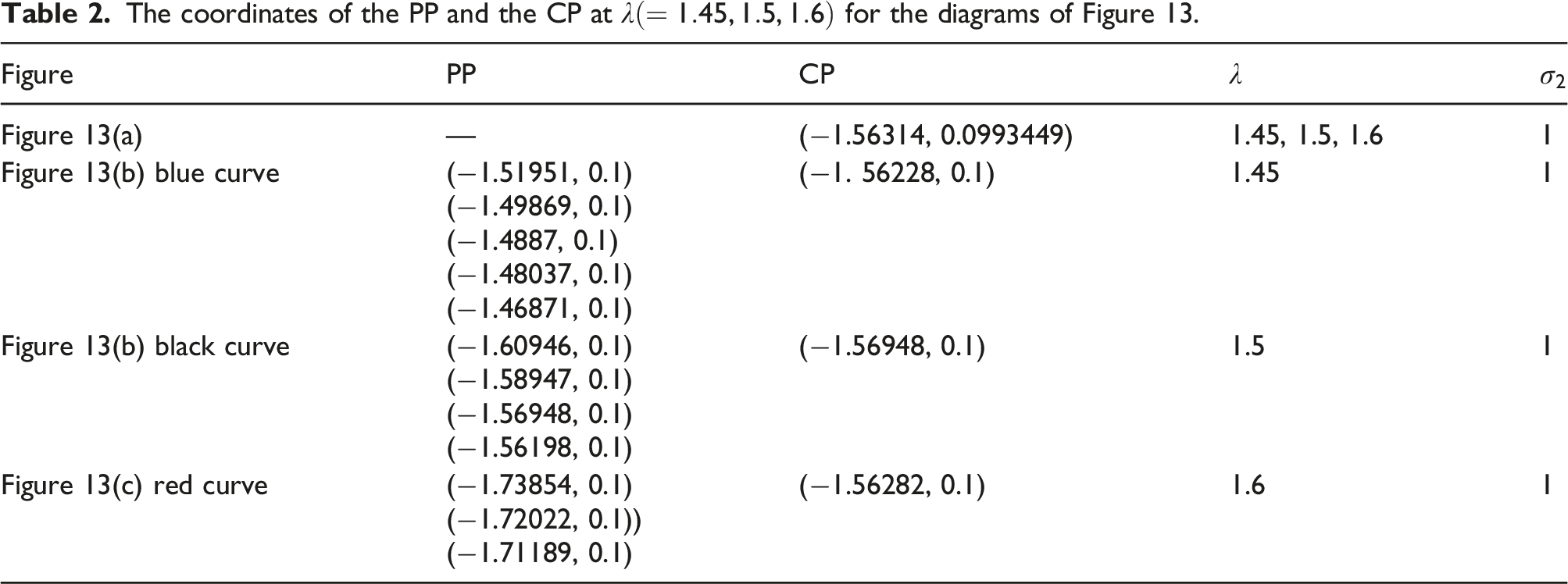
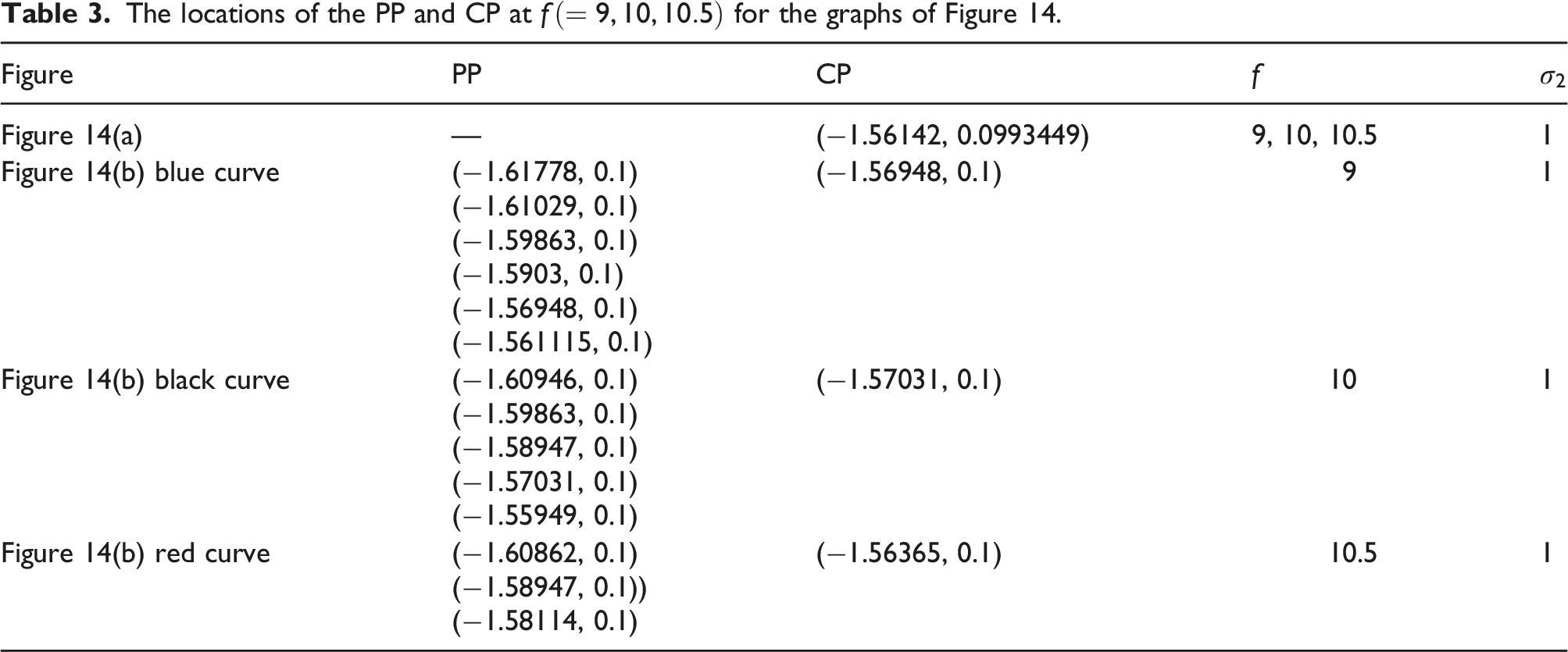
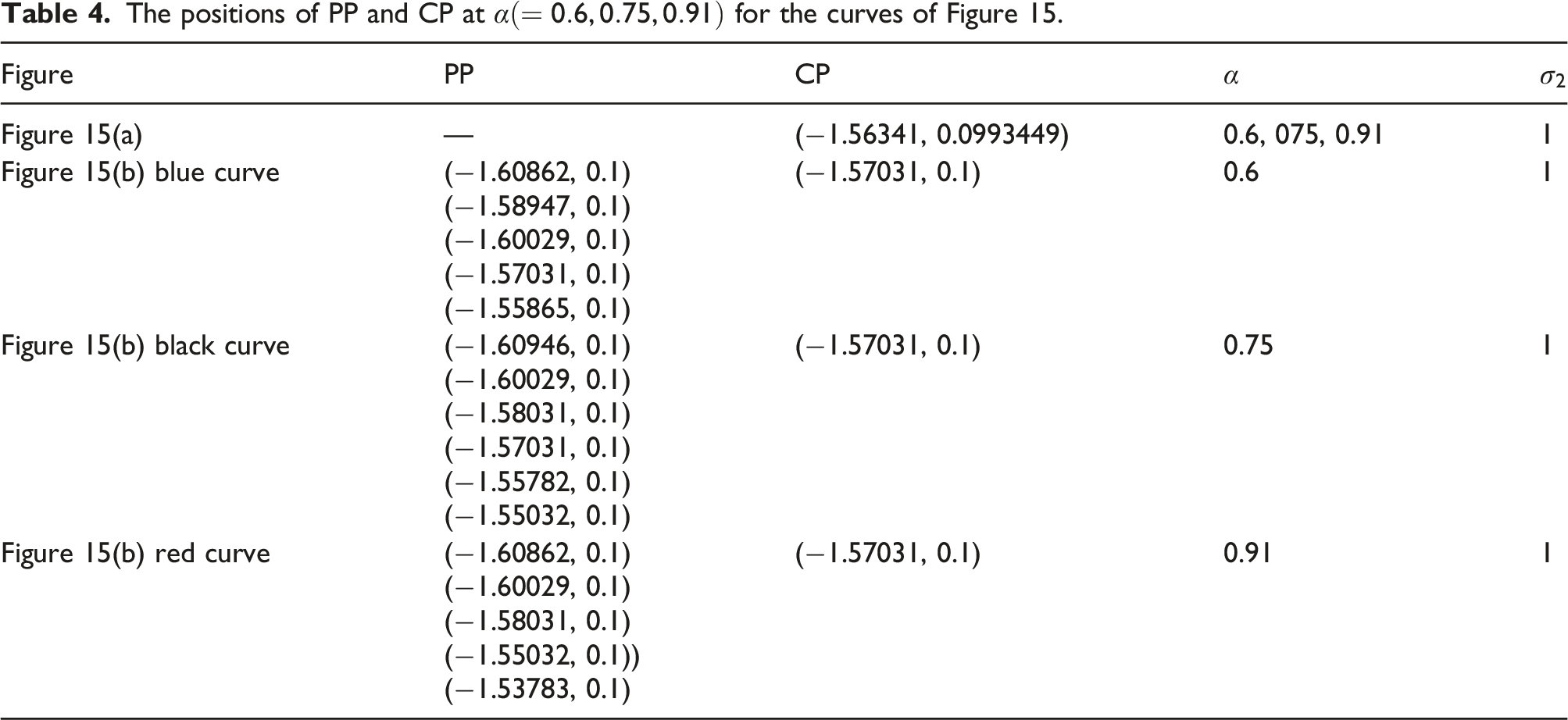
This section gives the stability and nonlinear evolution of the examined system applying the RHC. We will study disrupting the stability criteria for the properties for detuning parameters The FR curves as a function of The FR curves as a function of The FR curves as a function of The FR curves as a function of The PP and the CP positions at The coordinates of the PP and the CP at The locations of the PP and CP at The positions of PP and CP at 
Conclusion
A 2DOF dynamical system has been examined in this study, and the MSA has been utilized to solve the controlling system of motion. By virtue of the removal of secular elements, the solvability conditions have been established. All resonance scenarios have been categorized to comprehend the dynamical system’s equilibrium. The corresponding equations for the system’s modulation have been obtained through the examination of two of them. The RHC are used to identify all potential fixed points in the stable and unstable zones. Resonance curves and the motion behavior of the system have been plotted and evaluated. The Runge-Kutta fourth-order approach is used to produce the NS of the controlling system, which are then compared with the AS. High consistency between them has been noted, which further supports the strong accuracy of the MSA. Stability zones have been investigated from the perspective of their graphs in order to ascertain the beneficial impacts of various parameters on the motion. Numerous applications of the studied dynamical systems in real life demonstrate their importance, particularly in the reduction of vibrations in diverse engineering constructions. We will look for a non-perturbative solution to the investigated problem in the future. Furthermore, the stability conditions can be performed and plotted to show the stability and instability zones.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors extend their appreciation to the Deputyship for Research and Innovation, Ministry of Education in Saudi Arabia for funding this research work through the project number: IFP22UQU4240002DSR090.
Data availability
No datasets were produced or examined. Therefore, sharing of data is not appropriate for this study.