
Abstract
In this study, a model of two nonlinear spring masses subjected to a smooth friction-velocity curve is examined. The second order governing system of motion is obtained in view of the system friction forces. This system is transformed to another suitable one of first order to investigate the points of equilibrium using Hurwitz’s theory. The excitation and critical stick-slip (SS) speeds are determined in accordance with the characteristic equation for the Jacobian matrix of the system. The stability and behavior of the system motion, along with the behavior of the SS movement, are examined. The effect of various parameters, such as excitation speed, damping and fraction coefficients, linear and nonlinear stiffness of springs, and masses that affect the motion and stability of the system is analyzed and studied. This research has numerous practical applications in a variety of industries, including airports, modern car brakes, well drilling, explaining and understanding seismic events, mechanical transportation, friction in bridges, and civil systems, which all exhibit impacted friction in dynamics and stick-slip phenomena.
Keywords
Introduction
As a result of the resistance of friction during operation, most mechanical devices in use today generate undesired noise and vibration on their own. These vibrations, which are of the friction-self-excited variety, 1 are common in machines and tools, such as those used to slow down moving objects mechanically. Scientifically speaking, vibration is a well-known phenomenon with significant implications for dynamical systems, 2 the place where their structures can deteriorate and break down due to vibrations induced by friction surfaces. In worst-case scenarios, it might even lead to the breakdown of mechanical parts. Approximately 80% of mechanical component failures can be traced back to friction-induced vibration. 3
Over the past few years, numerous vibrational models have been studied due to their significance in several engineering applications, for example, Refs. 4–12. In Refs. 4–8 and Refs. 9–12, respectively, various dynamical movements of damped linear/nonlinear springs and rigid body pendulums are examined. The regulating equations of motion (EOM) were obtained in accordance with Lagrange’s equations of the second kind, and approximate solutions of these equations were obtained via a multiple scales approach (MSA). 13 For several classes of resonances, the necessary conditions for solvability and the corresponding modulation equations were established. In addition, the stable and unstable zones are plotted and discussed in Refs. 7, 8, 11, and 12 via the nonlinear criteria of Routh–Hurwitz. 14
The vibrating planar motion of rigid body has been examined in Refs. 15–17. The movement of a connected rigid body with a linear spring, as a pendulum, is investigated in Ref. 15 in which the authors considered its pivot point to be fixed. The generalization of this problem has been studied in Ref. 16 when the pendulum has two connected rigid bodies with a nonlinear spring. The authors restricted the motion of its suspension point to being on a trajectory of Lissajous curve. Recently, the analytic approximate solutions of the EOM of a triple rigid body with a stationary fixed point up to the third approximation using the MSA are examined in Ref. 17. The arising resonance cases are categorized, in which three of them are studied simultaneously.
However, many academics have become interested in the use of absorbers in the configuration of various dynamical model structures, for example, Refs. 18–23. The reason is that they are used in engineering industries to control vibration. The behavior of a three-degrees-of-freedom (DOF) nonlinear spring pendulum was examined in Ref. 18 to shed light on how a longitudinal absorber might stabilize and control the vibration of a ship roll motion. Whereas the behavior of a 2DOF tuned absorber’s in an elliptic trajectory of its suspension point was studied in Ref. 19. The stability criteria were established and the steady-state solutions around the specified resonance circumstances were examined. In Ref. 20, it is discussed how the behavior of the considered model in Ref. 19 is affected by the existence of a damped nonlinear elastic pendulum. In Ref. 21, the problem of analyzing the vibrations of a coupled inverted pendulum using a passive mass as a spring absorber was addressed. In Ref. 22, the authors showed how to determine the phase between the primary structure’s vibration and the absorber’s vibration in order to automatically adjust the rotating speed of a 2DOF pendulum absorber. The authors of Ref. 23 concentrated on the investigation of a few non-conservative oscillator cases. The procedure for the solutions of conservative oscillators has been greatly simplified by the modification of the homotopy perturbation method (HPM). Additionally, this alteration is thought to be exclusive to HPM and is not reflected in the other perturbation approaches. In Ref. 24, the fractal Toda oscillator is established using the theory of fractal variation and the proper analytical solution is obtained using the non-perturbative approach.
The challenges of friction-induced vibrations have been investigated in the past using a wide range of numerical calculation and experimental analytic techniques.25–27 To the contrary, friction-induced vibrations are affected by a wide range of variables, such as the component’s stiffness, the frictional interface’s material properties, the damping process, the surface topography, and the working environment. Therefore, it is very challenging to investigate friction-induced self-excited vibrations. 28
Over the course of several decades of scientific inquiry, many researchers have studied different aspects of identifying the critical variables that cause the formation of vibrations induced by friction,29,30 in which the frictional vibration mechanism is highly relevant to both applied and theoretical fields of study.
Customers using vehicles or other machines that experience vibration due to friction find it as an annoying phenomenon. To better understand friction-induced vibration and the resulting nonlinear motions, spring mass models have been developed and analyzed. In particular, friction-induced chaotic motions were investigated in Refs. 31–34. Stick-slip (SS) oscillations’ mechanisms and frequency patterns were also discussed in Ref. 35. If the oscillation is chaotic, then unexpected phenomena, like a spectrum of frequencies that was not anticipated, may emerge.
Lyapunov exponents are a useful tool for finding the chaotic attractor. Chaotic behavior is characterized by a high degree of sensitivity to the model’s initial conditions. The nonlinear motion displays the weird attractor if the greatest Lyapunov exponent is non-negative, in which it can be computed as in Refs. 36 and 37.
In many different studies on dynamic systems, smoothing methods are used to model the friction curve in the engaged model. The discontinuous friction curve is changed to a differentiable one via the smoothing technique. The friction curve has been modeled using smoothing techniques in the friction-engaged model.38–40 Wolf’s algorithm 37 can be used to calculate Lyapunov exponents in a smooth frictional system since the smoothing method converts the discontinuous friction curve into a differentiable one.
The coefficient of friction changes depending on a number of factors, including the material of the two rubbing surfaces, the amount of debris on the surface, the speed at which they are moving, and so on. When a system is put through the rigors of frictional contact, the friction curve will shift significantly, which might cause a variation in the forms of nonlinear motion.41,42 For nonlinear motion, this could mean a transition between different forms. The authors looked at how the friction curve affects the emergence of the chaotic attractor, in which the velocity-dependent friction curve was used. The parameters of the main system were determined by adjusting the slope of the curve and the friction-velocity magnitude. 43
However, complicated mechanical characteristics, such as chaos and bifurcation, are frequently present in nonlinear vibration systems, making it challenging to compute and analyze them analytically. As a result, approximate analytical algorithms are frequently used. In Ref. 44, the authors studied the planar excitation-driven suspension of elastic cables with roughly comparable natural frequencies. According to the analysis of first order, there is a relationship between cubic nonlinearity, both jump phenomena and saturation. The approaches of multiple scales and Runge–Kutta are used in Ref. 45 to investigate the nonlinear vibration properties of multilayered cylindrical composite shells with axial movement. The achieved outcomes demonstrate several nonlinear characteristics, like the phenomena of internal resonance, which highlight the influence of damping, velocity, and excitation amplitude on the internal resonance range, amplitude response, and soft characteristic of the system. In Ref. 46, the piecewise nonlinear characteristics of the viscoelastic shock absorber and the relationship between amplitude-frequency characteristics and system parameters are investigated. Using the same methodology, Ref. 47 investigates whether delay feedback control of the gyroscope system under stress is feasible. Using a shooting approach, the vibration phenomena, with one DOF magnetically levitated system, is examined taking into account the influence of the electromagnet’s nonlinearity. An analytical technique for assessing the periodic behavior of steady-state for a nonlinear system was proposed in Refs. 48 and 49. This technique is based on the approach of multiple scales and the substructure synthesis formulation.
The primary objective of this work is to examine the SS vibration of a 2DOF dynamical model. This model consists of two masses connected with nonlinear damping springs. In light of the system friction forces, the motion’s governing system of second order is obtained. The points of equilibrium are explored using Hurwitz’s theory, in which the controlling system of motion is converted into another suitable one of first order. According to the Jacobian matrix of the investigated system, the excitation and critical SS speeds are calculated. It is looked at for how the SS movement behaves as well as the stability and behavior of the system motion. The impact of various parameters, like excitation speed, damping and fraction coefficients, linear and nonlinear stiffness of springs, and masses that acted on the motion and stability of the system is analyzed and studied.
The mathematical model and governing equations
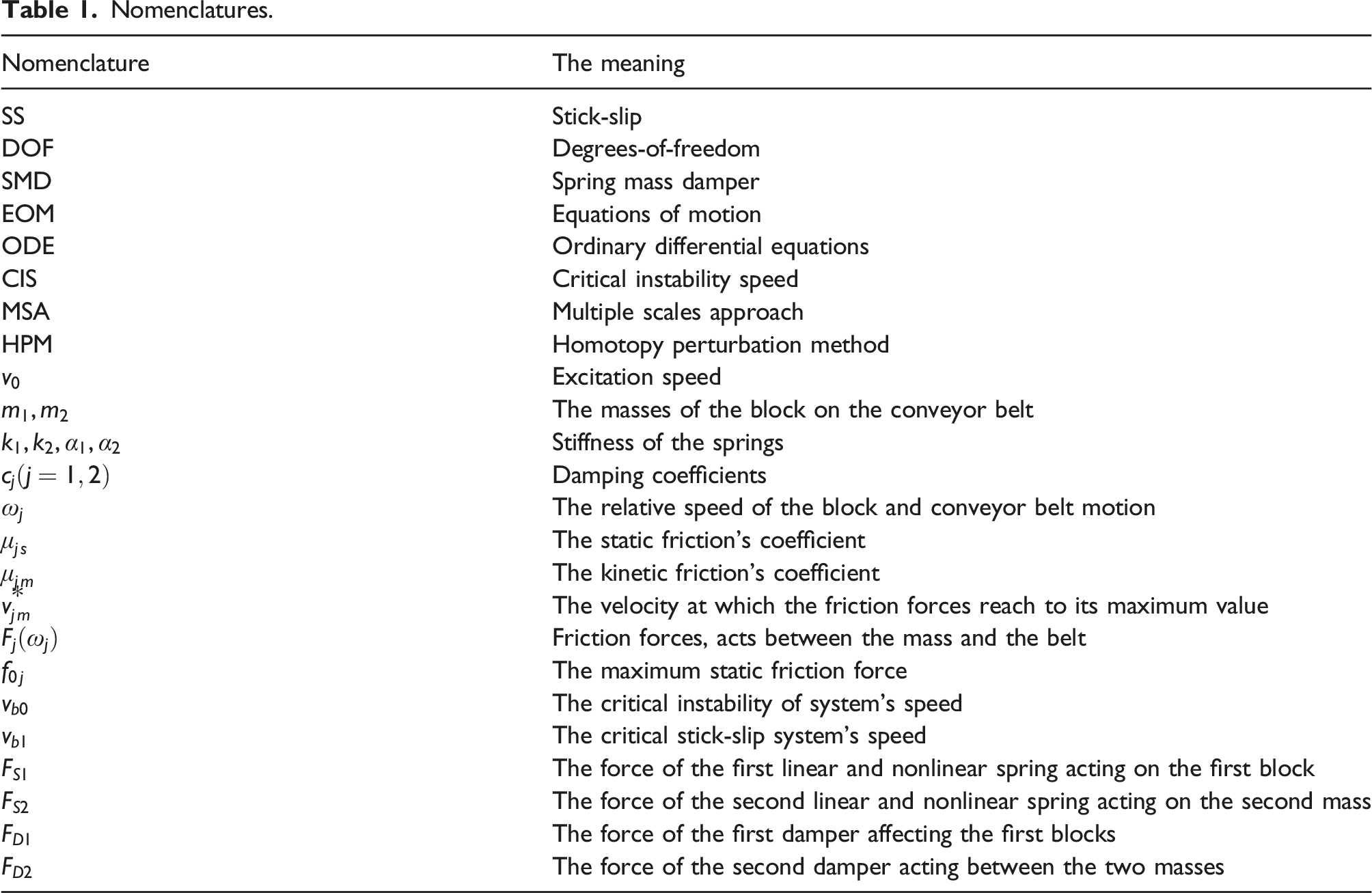
The main aim of the current section is to describe the investigated model. Therefore, two masses (a) Self-sustaining, friction-generating, linked oscillators. (b) Illustration of the forces acting on the blocks. Nomenclatures.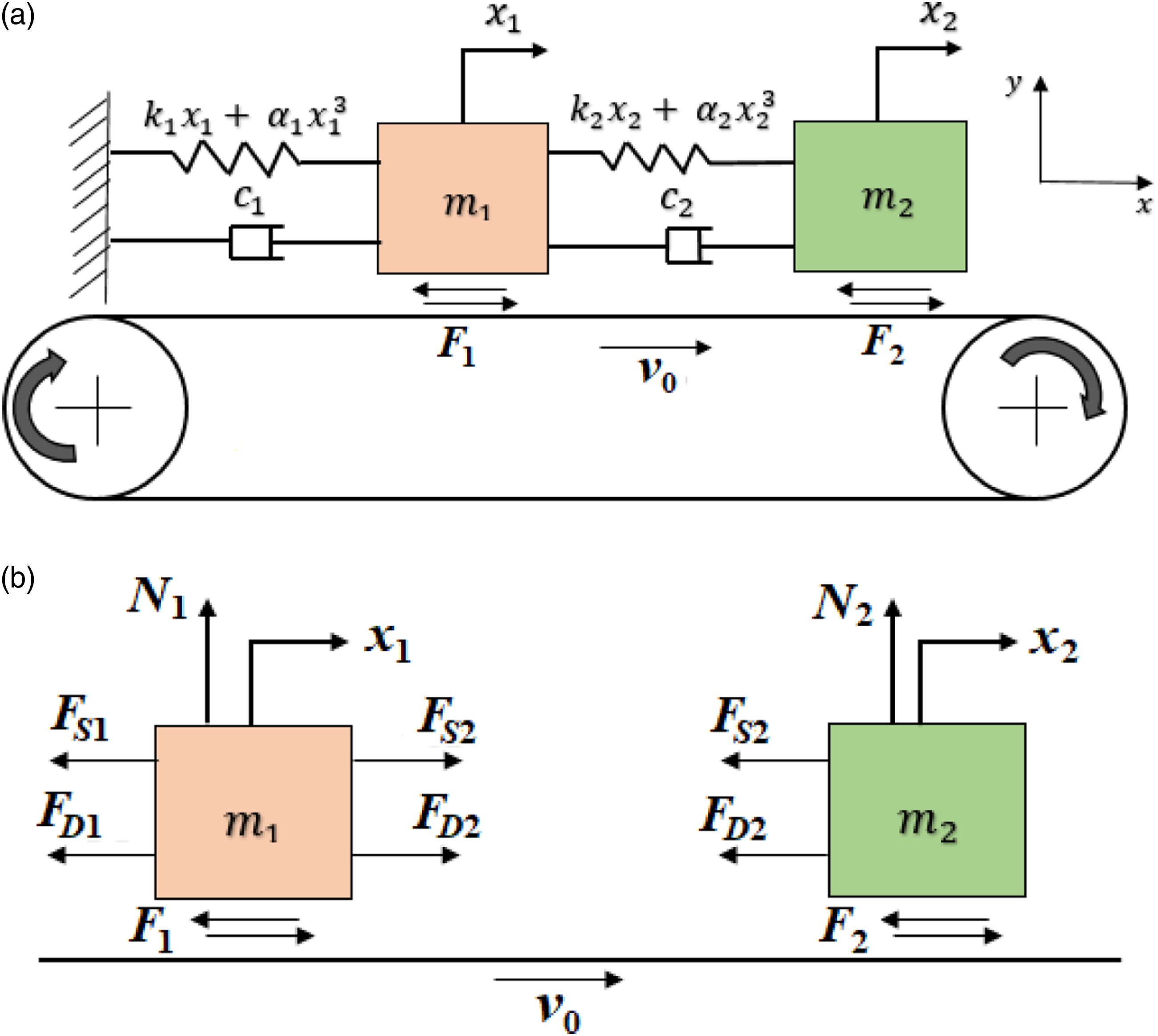
The EOM can be obtained from Newton’s second law. Since the investigated system consists of two blocks, to obtain the desired equations, one can apply this law to these blocks as follows:

Here, 
The substitution of equations (2) and (3) in equation (1) yields the following EOM:
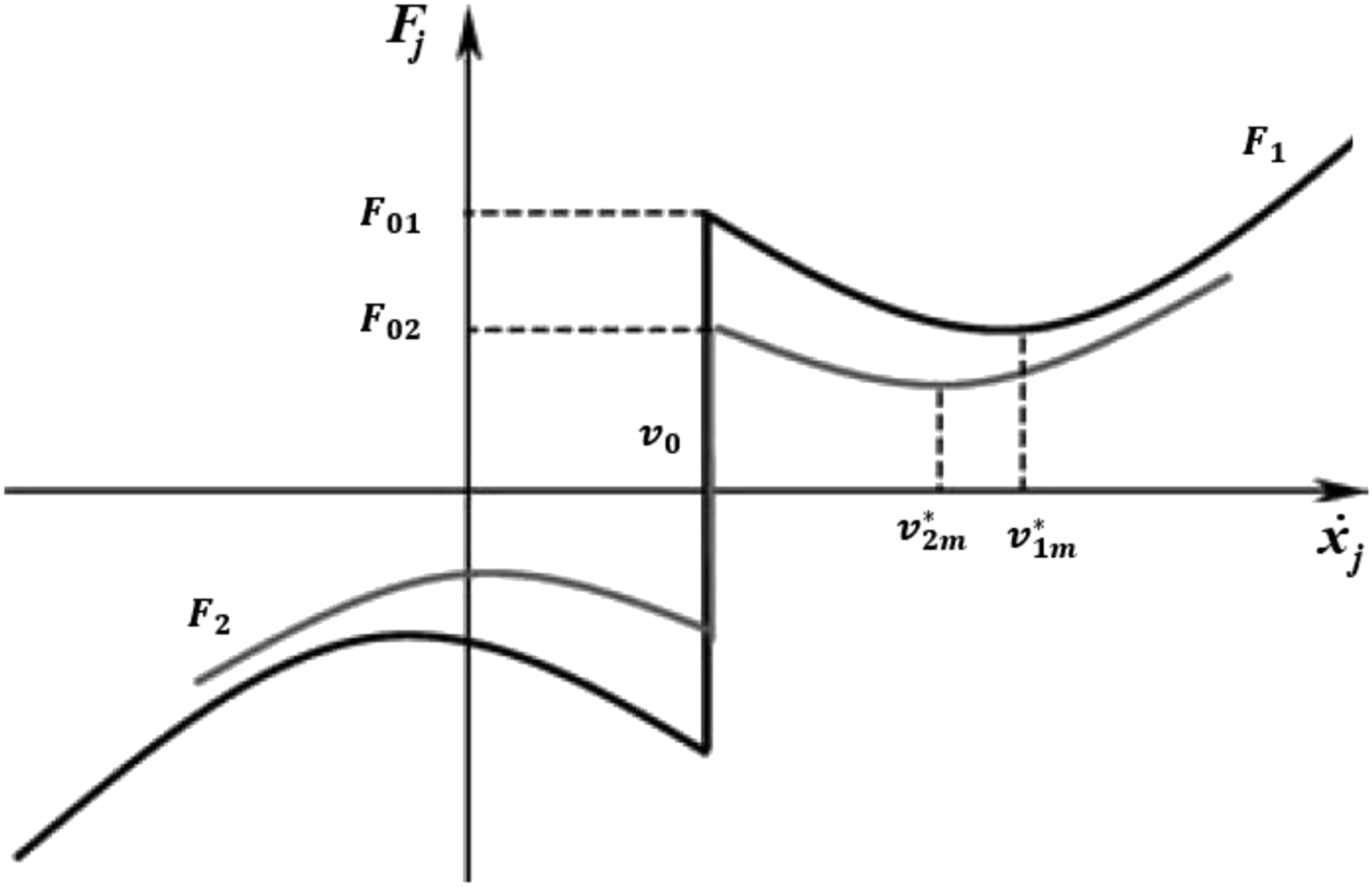
The dry friction equations of the model under study can be written as follows:
50

Here, Friction model.
It should be observed that while the block is at rest in relation to the conveyor belt, the relative velocity
Analysis of the SS and critical speeds
If the parameter 
Consequently, it is possible to rewrite the EOM (4) in the following dimensionless forms:


In accordance with the ordinary differential equations’ (ODE) theory, one can transform a set of higher-order ODF to another one of first-order ODE. Then, the formulas listed below can be used to achieve this objective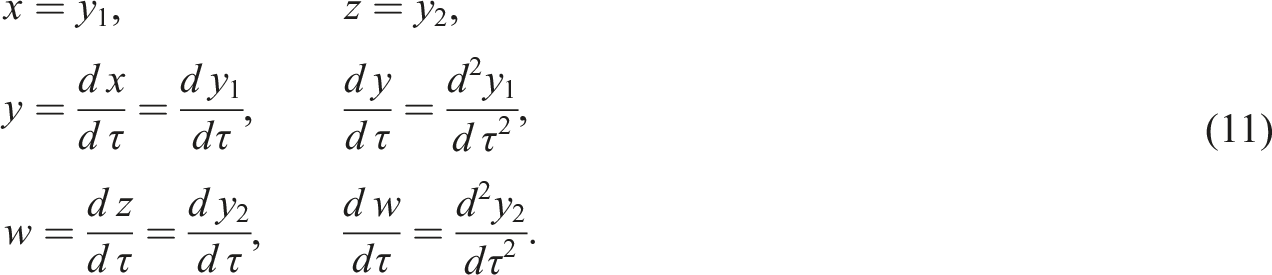
The following system of differential equations is generated by inserting equation (11) into equations (8) and (9).
Because of the mutual action of friction and spring forces, the block will remain in equilibrium as long as the excitation speed is sufficiently high.
52
As a result, the parameters of system and the equilibrium conditions 
If the point of equilibrium is moved to the origin zero point, the resulting equations are as follows:
Therefore, the previous equation (12) becomes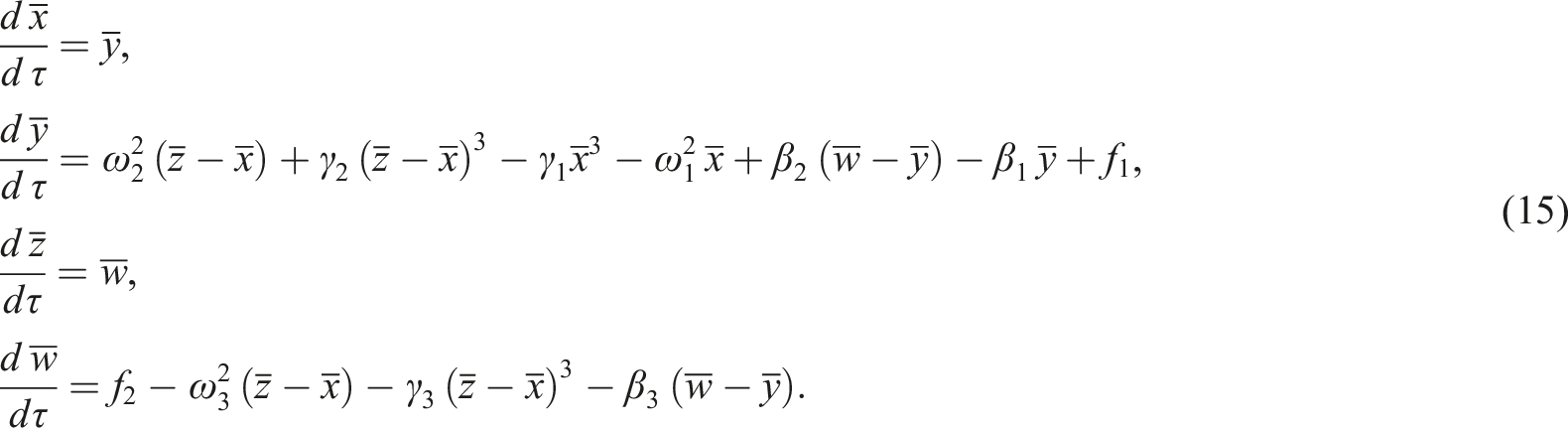
One can determine the Jacobian matrix from equation (15) for the system’s first-order approximation equation at 
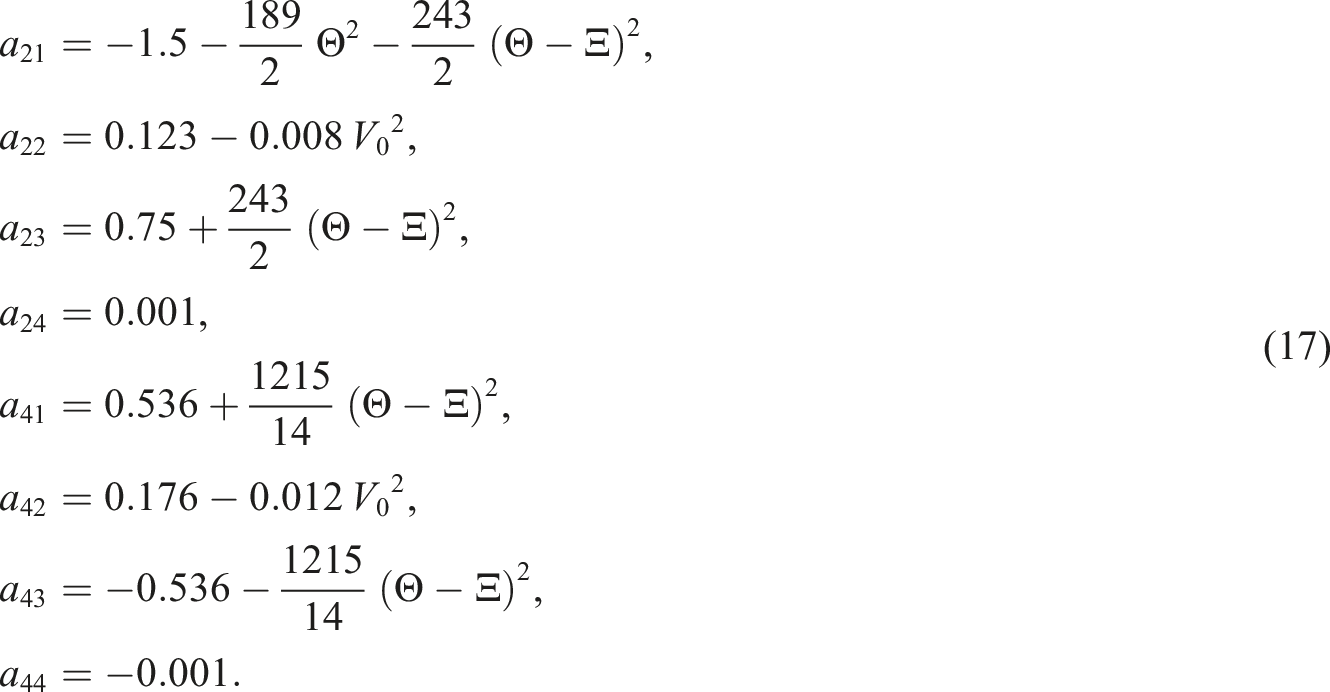
Considering the following values of variables
The following formula gives us the matrix 
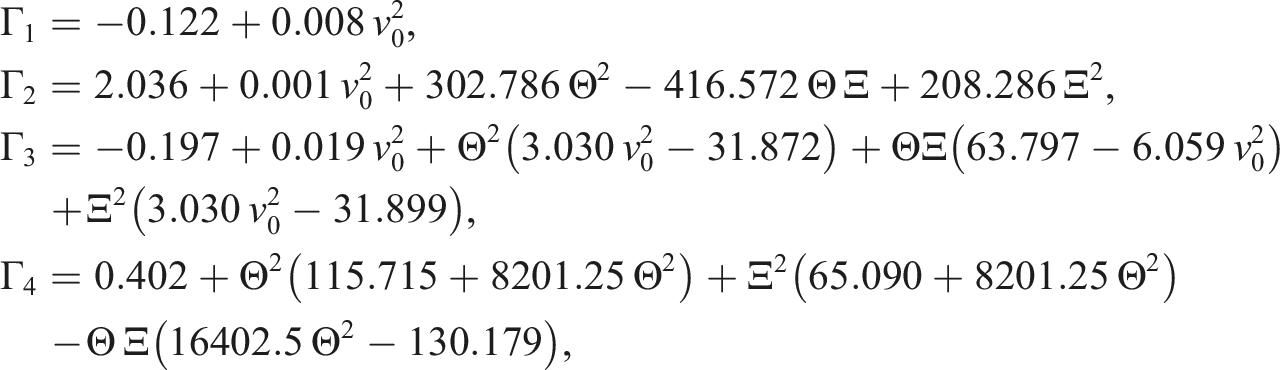
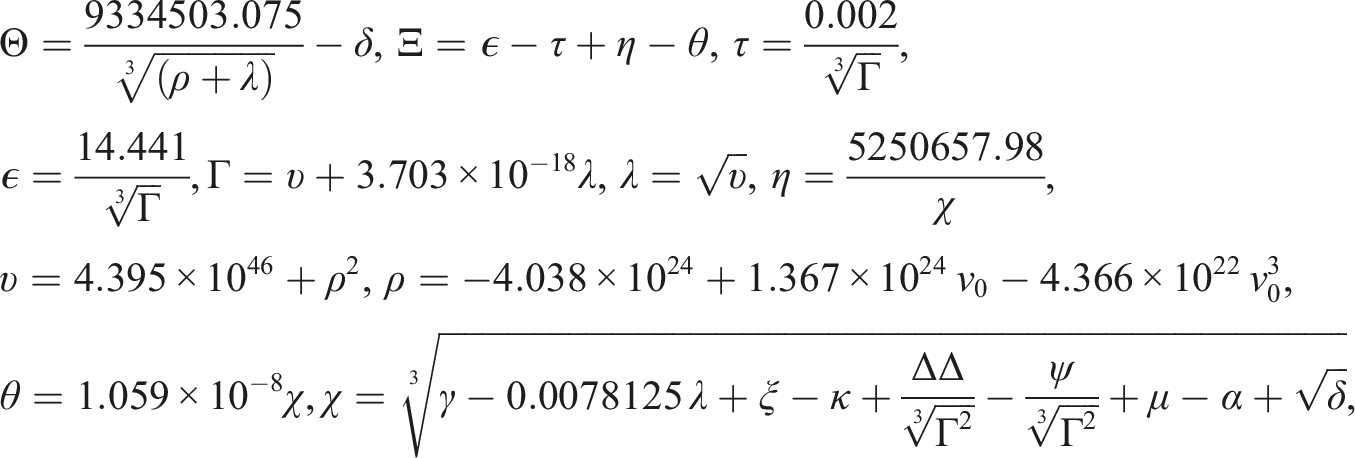
According to the Hurwitz’s theory, the basic critical instability speed (CIS) of the system under consideration may be obtained from 
The critical SS speed for the system under study is
Studying the effects of system parameters
We will focus, in this section, on the numerical solutions of the EOM (8) and (9) in view of the MATLAB R2020a. Furthermore, we investigate the impact of different system factors on stability and SS performance in particular. Therefore, we can comprehend the influence of each parameter on the system’s reaction; we shall subdivide this part into a few subsections.
Excitation speed effect
To fully comprehend the influence of the excitation speed 
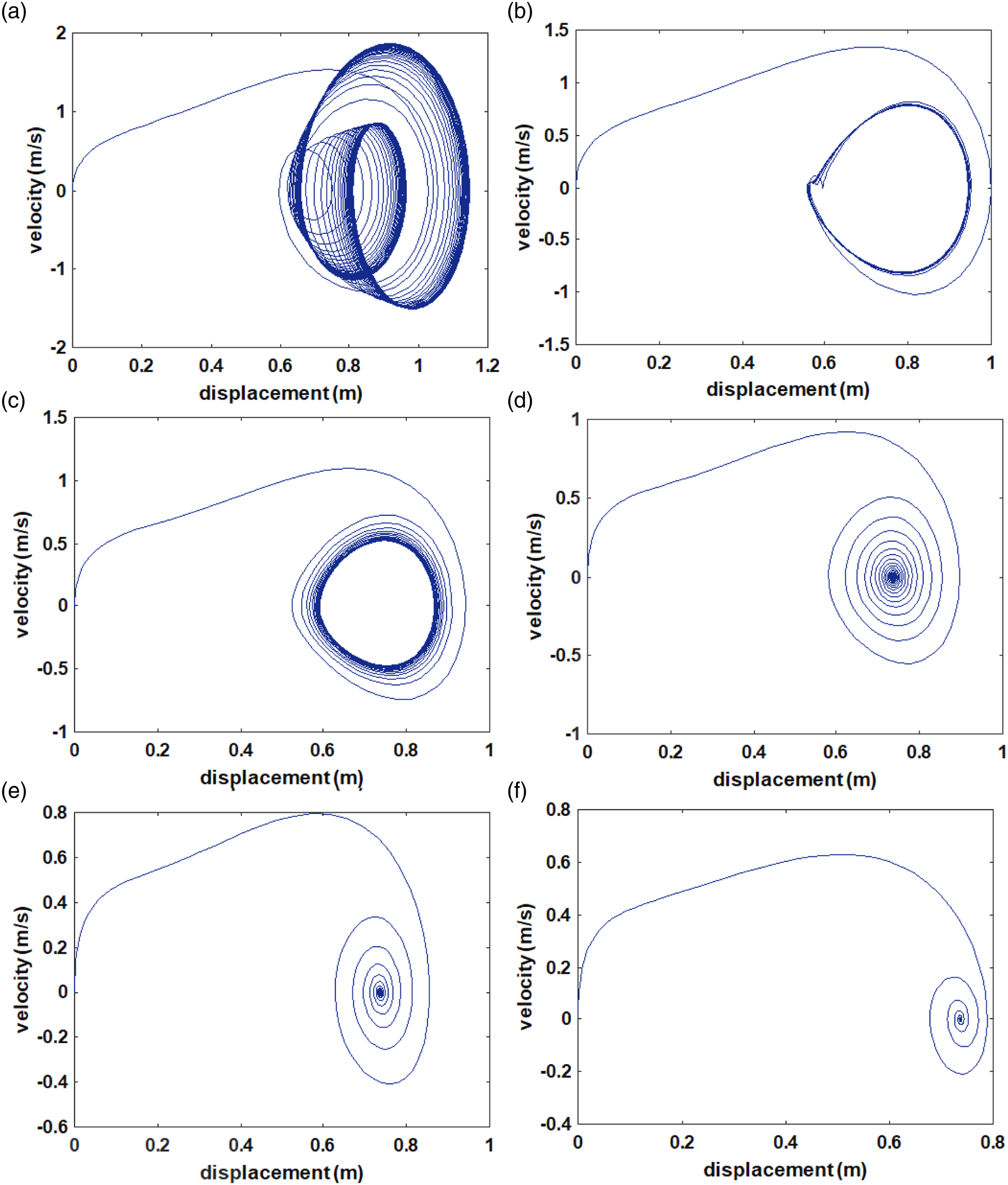
Portions of Figure 3 are calculated when the excitation speed has the values Describes the diagrams of phase planes for different values of speeds excitation: (a) 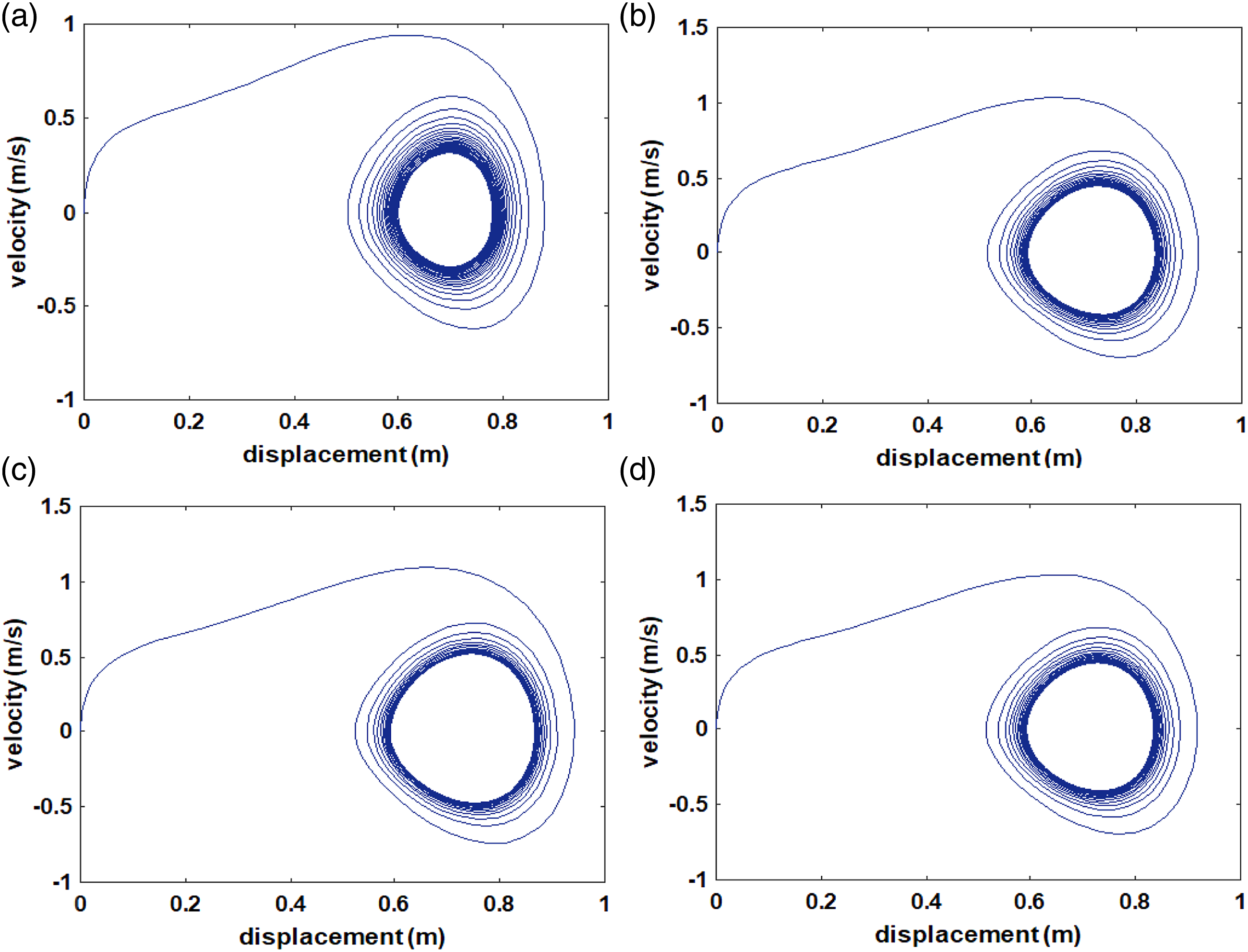
As observed in Figure 3, the illustrative phase plane diagrams vary remarkably with the use of different excitation speeds, in which they are examined according to various values of the used speeds besides the relations
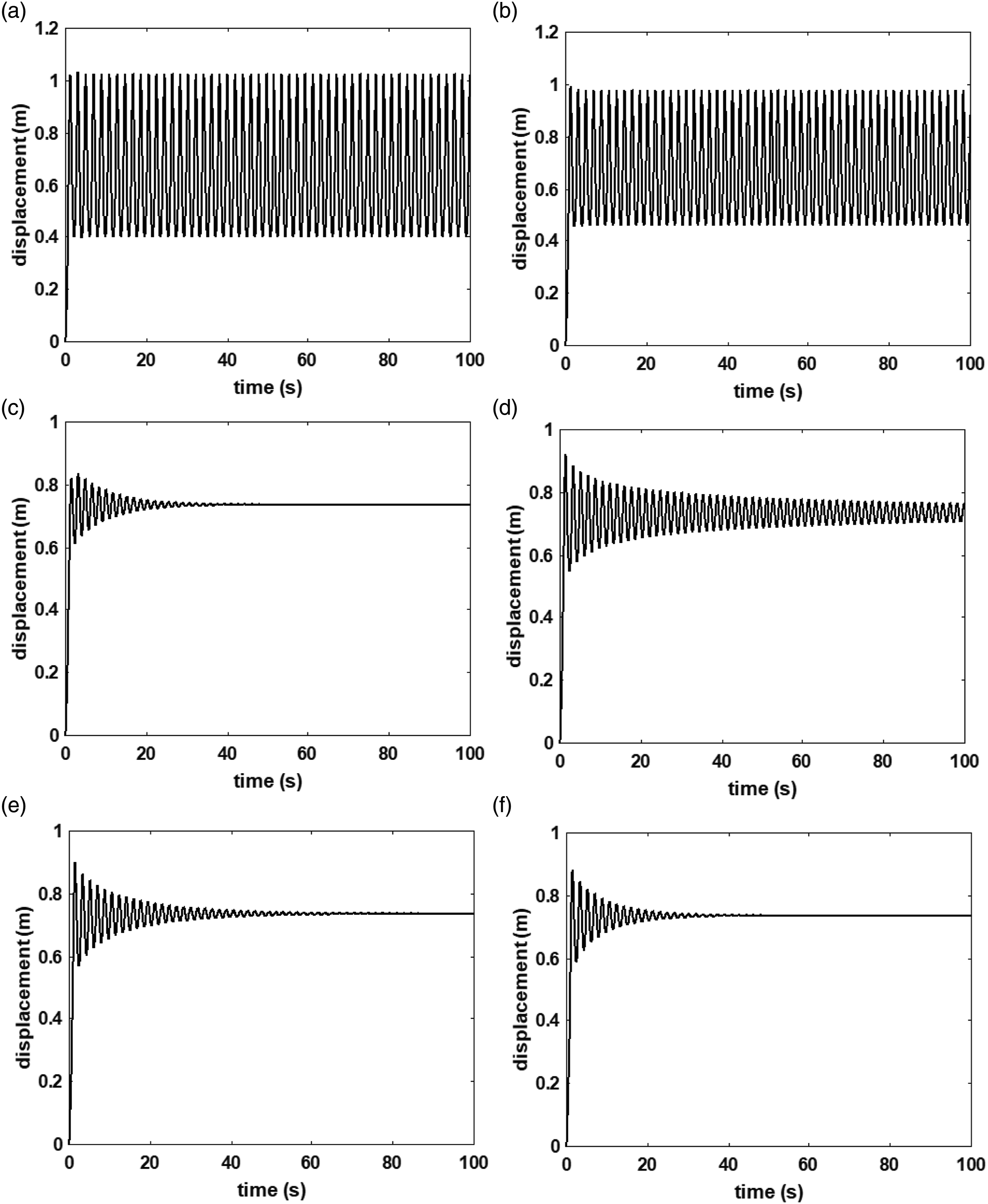
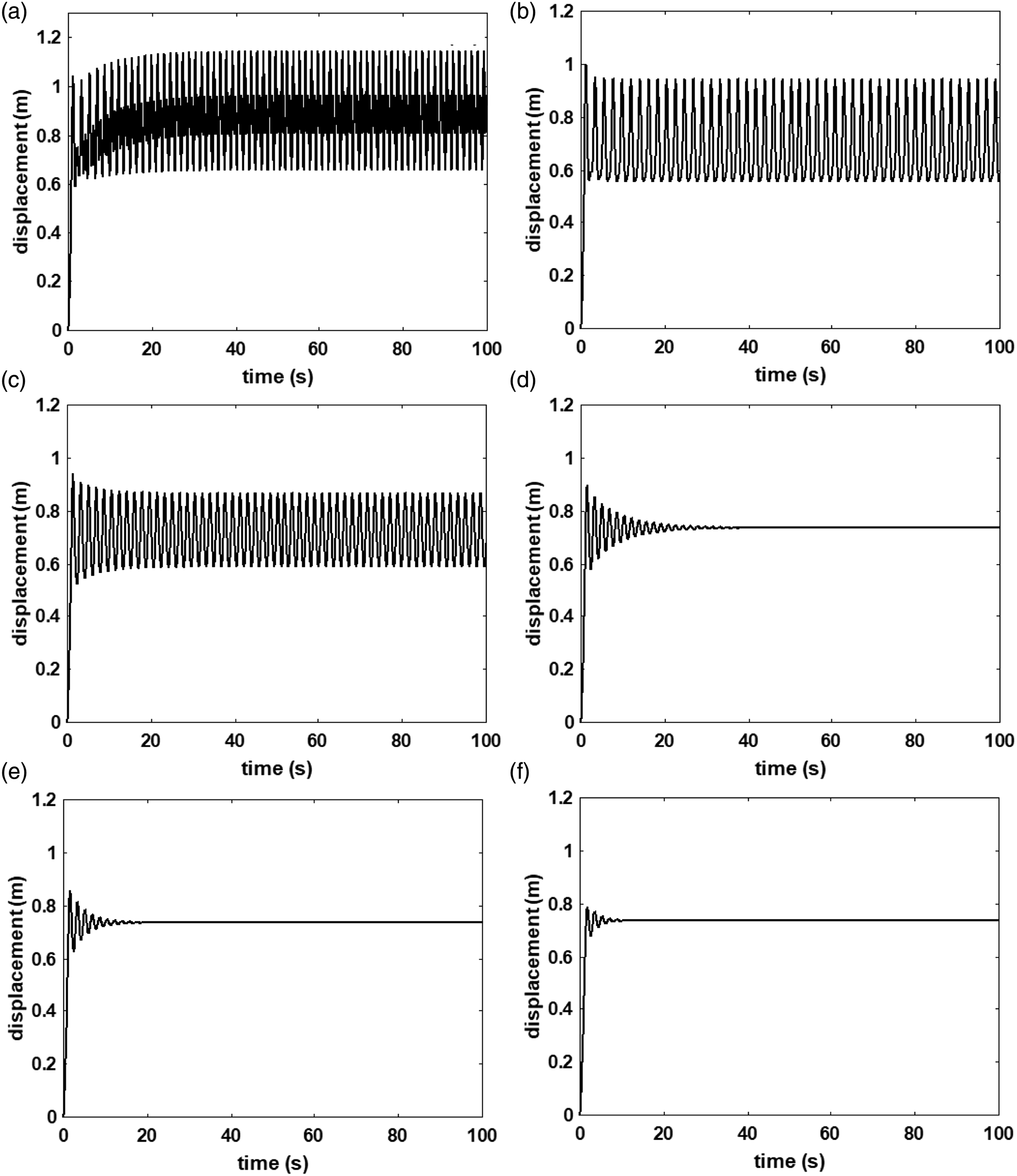
The graphics shown in Figure 4 express the equivalent time history of the corresponding ones in Figure 3. These portions are drawn in the planes of displacements and time. According to all of the time history plots, the system displays quasi-periodic motion at different excitation levels and is free of chaotic motion. The drawn curves of portions (a), (b), (c), and (d) start from their initial points and then rise to their certain values to oscillate periodically over the examined time interval. Then, one can conclude that the motion has a stable procedure. Describes the diagrams of time histories for different values of speeds excitation: (a) 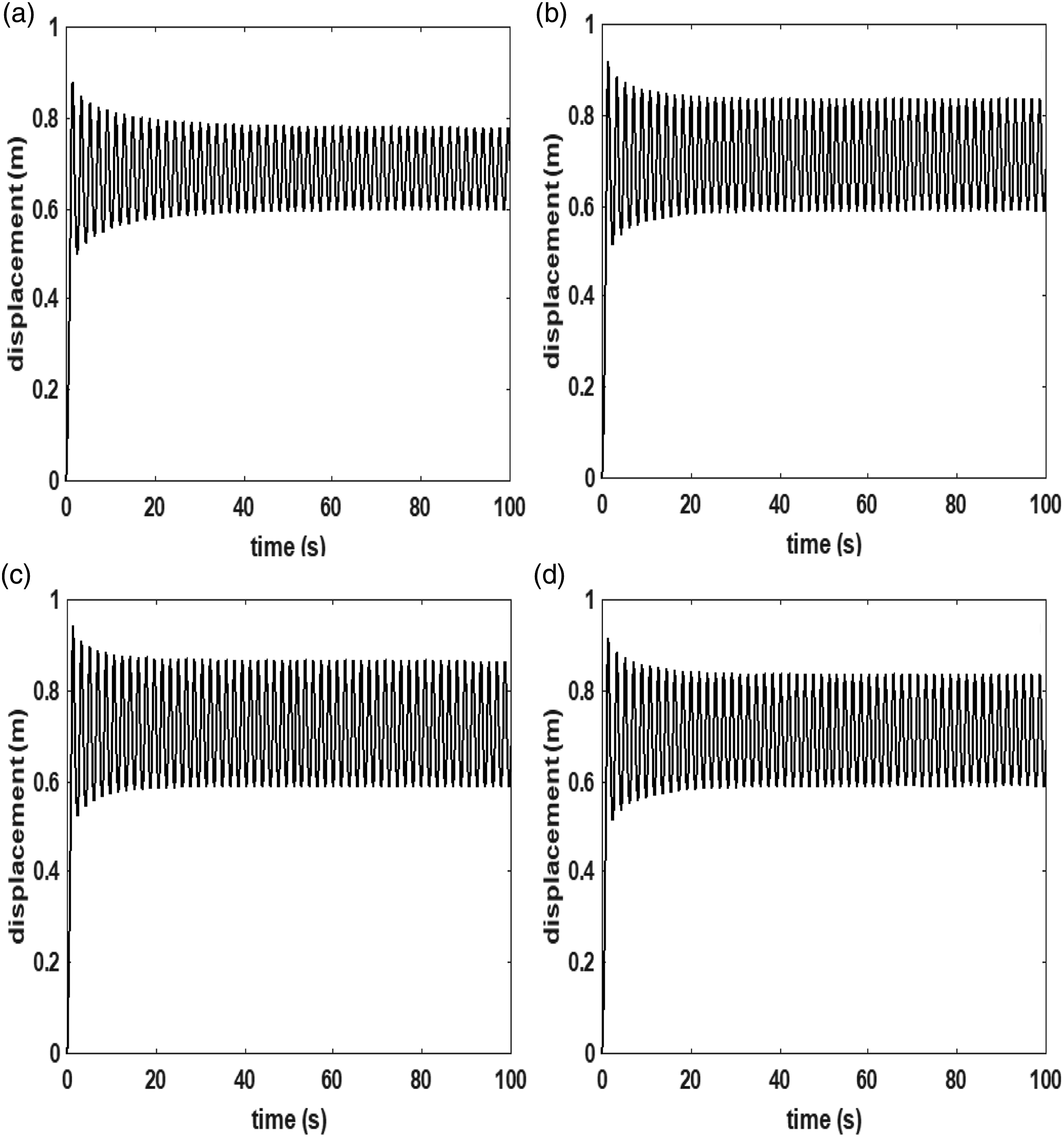
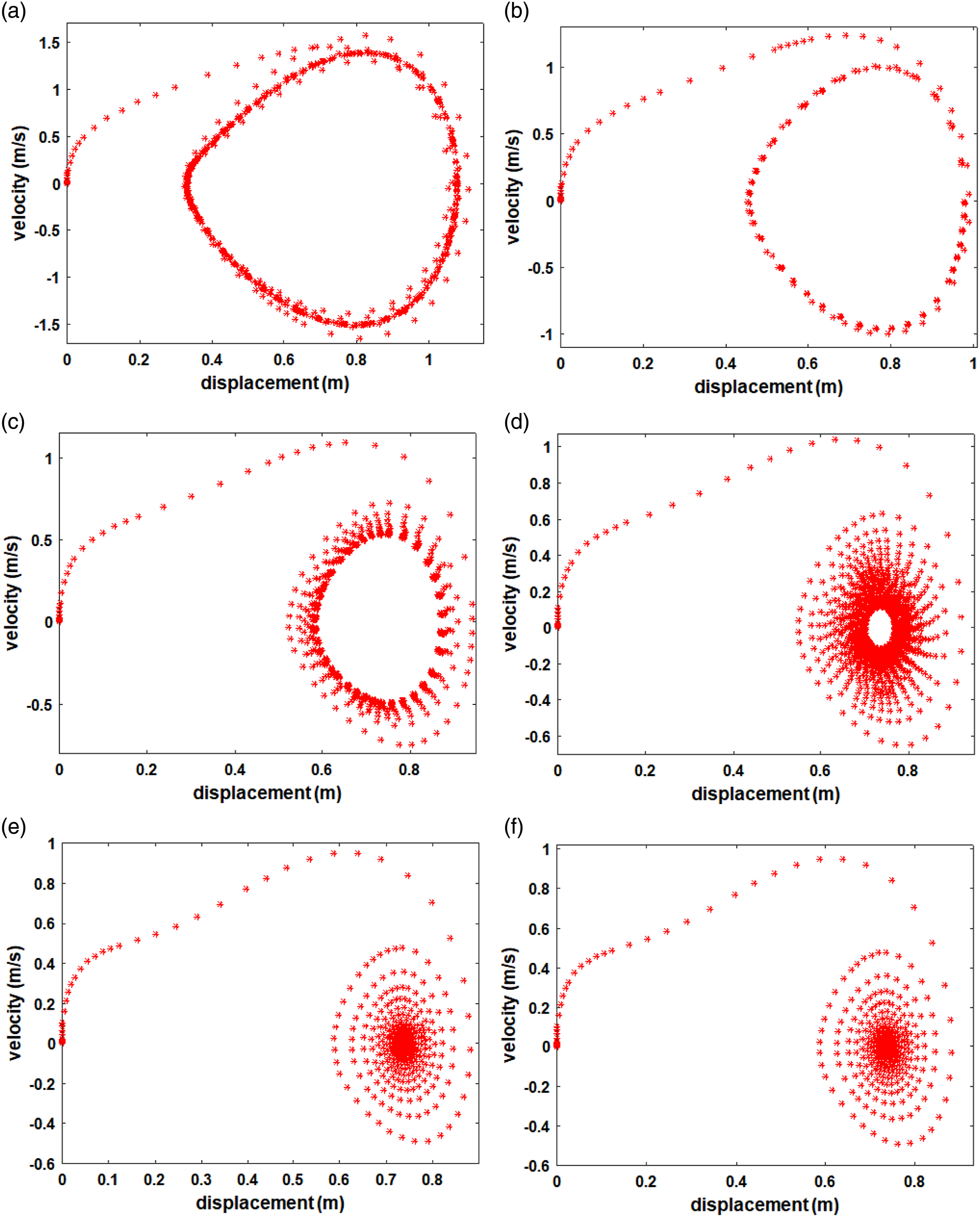
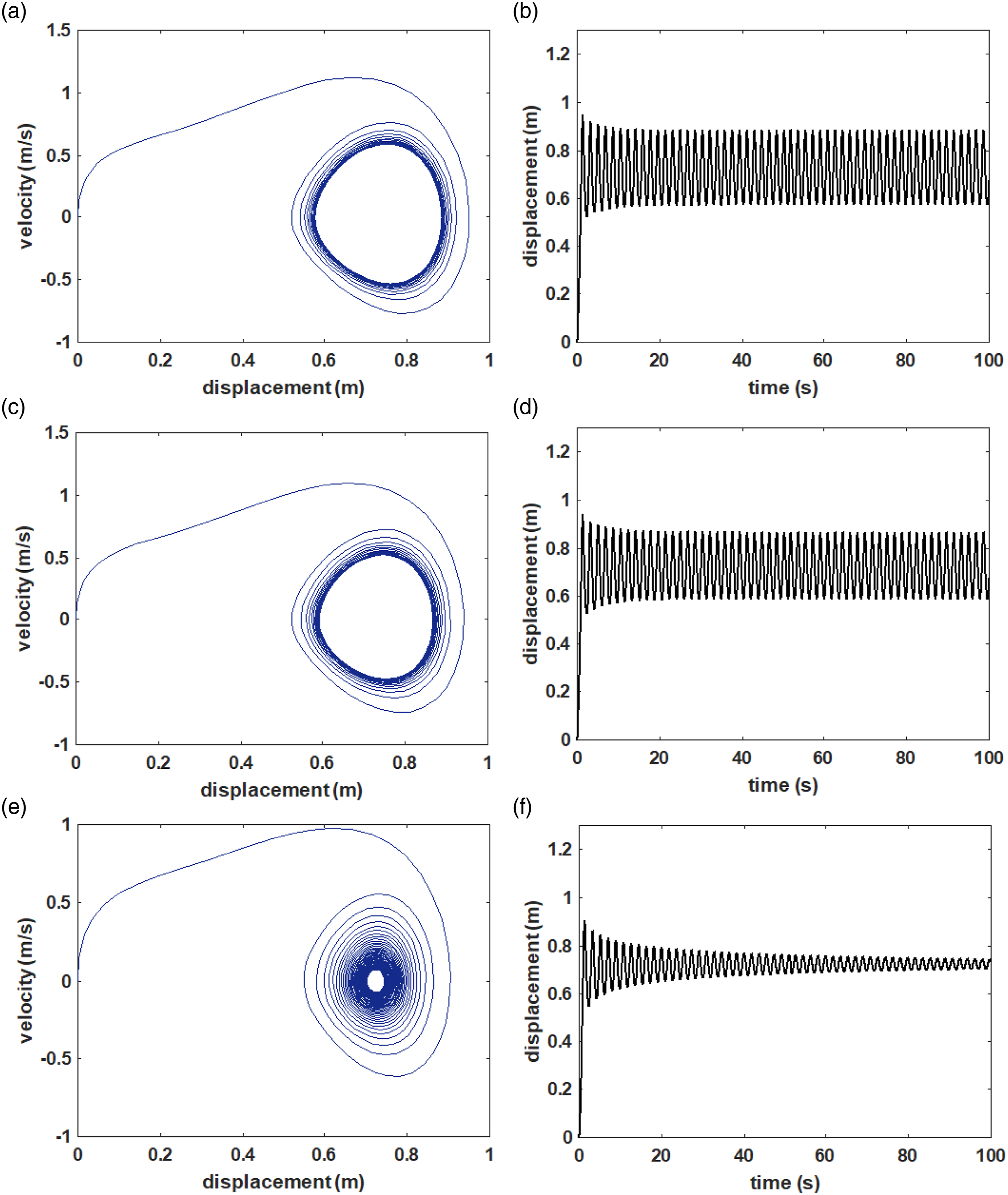
Portions of Figure 5 express the equivalent Poincaré maps of the corresponding ones of Figure 3. These portions are drawn in the planes of displacements and velocities. According to all of the Poincaré plots, the system exhibits periodic motion after a very short time from the start of the motion, at different excitation levels and the system is free of chaotic motion. Sketches the Poincaré maps of the relevant aspects in Figure 3, where (a) 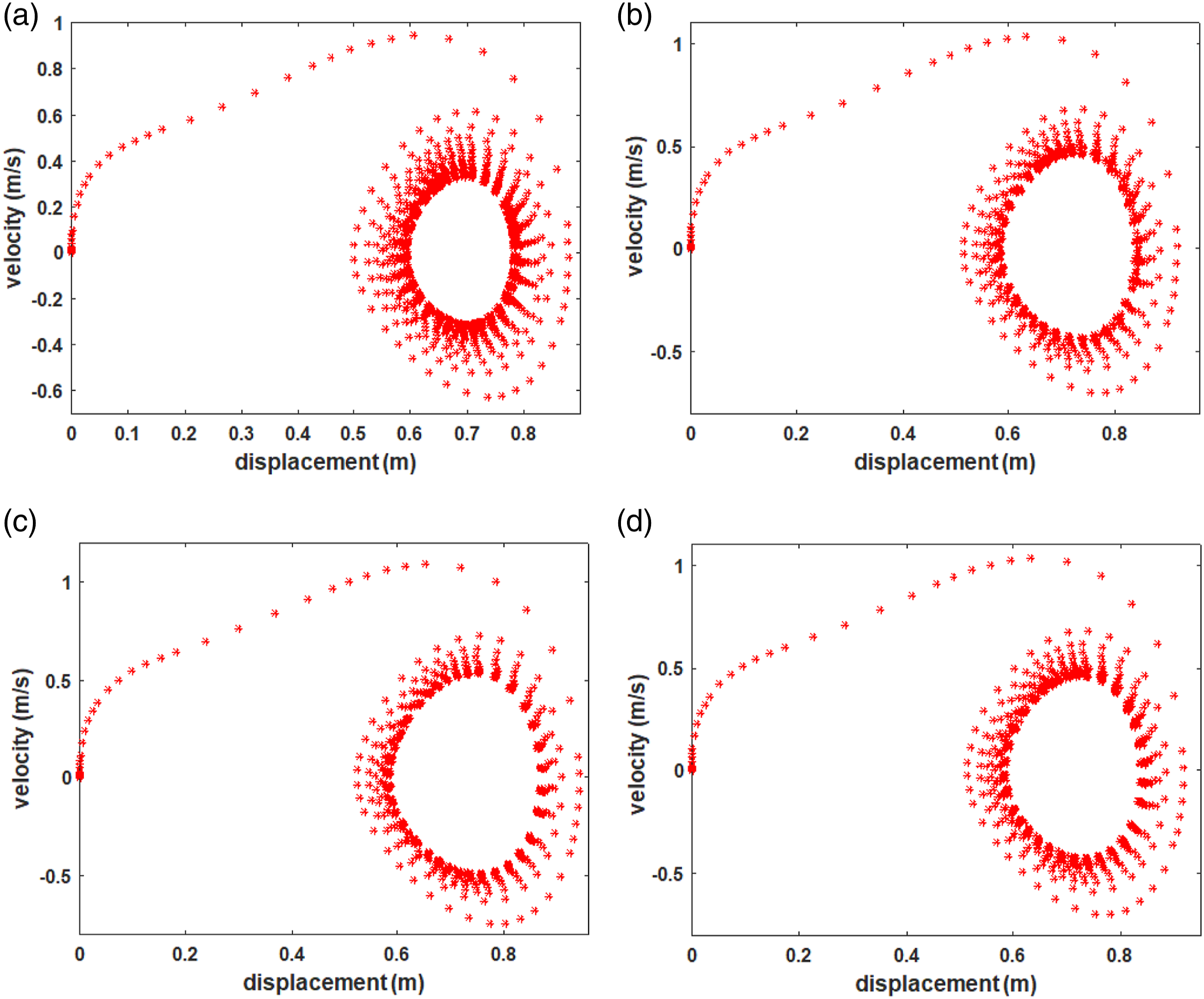
If the excitation velocity follows the relation (a, c, e) shows the curves of the phase plane, while (b, d, f) are the corresponding relevant sections of Poincaré: (a, b) 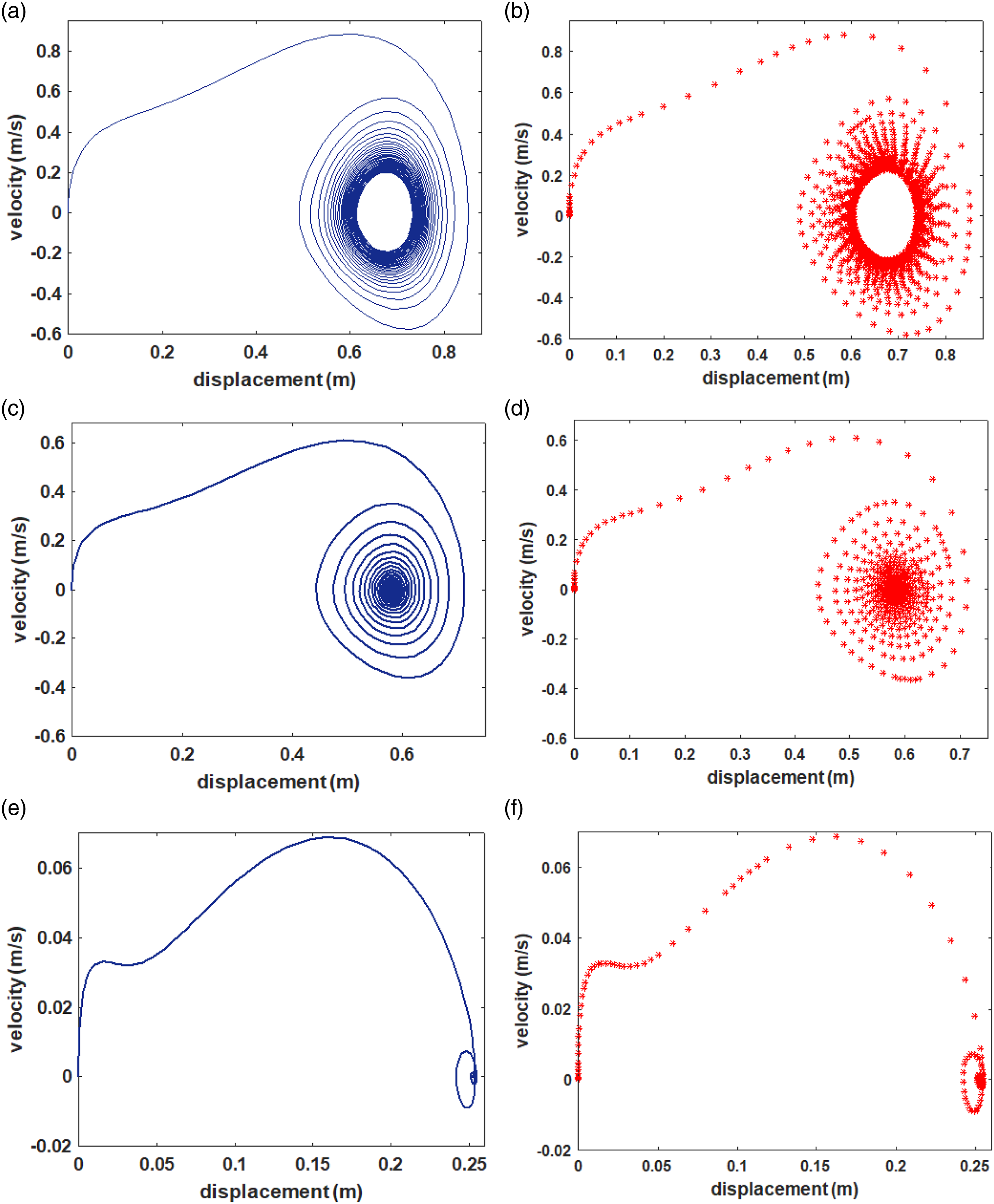
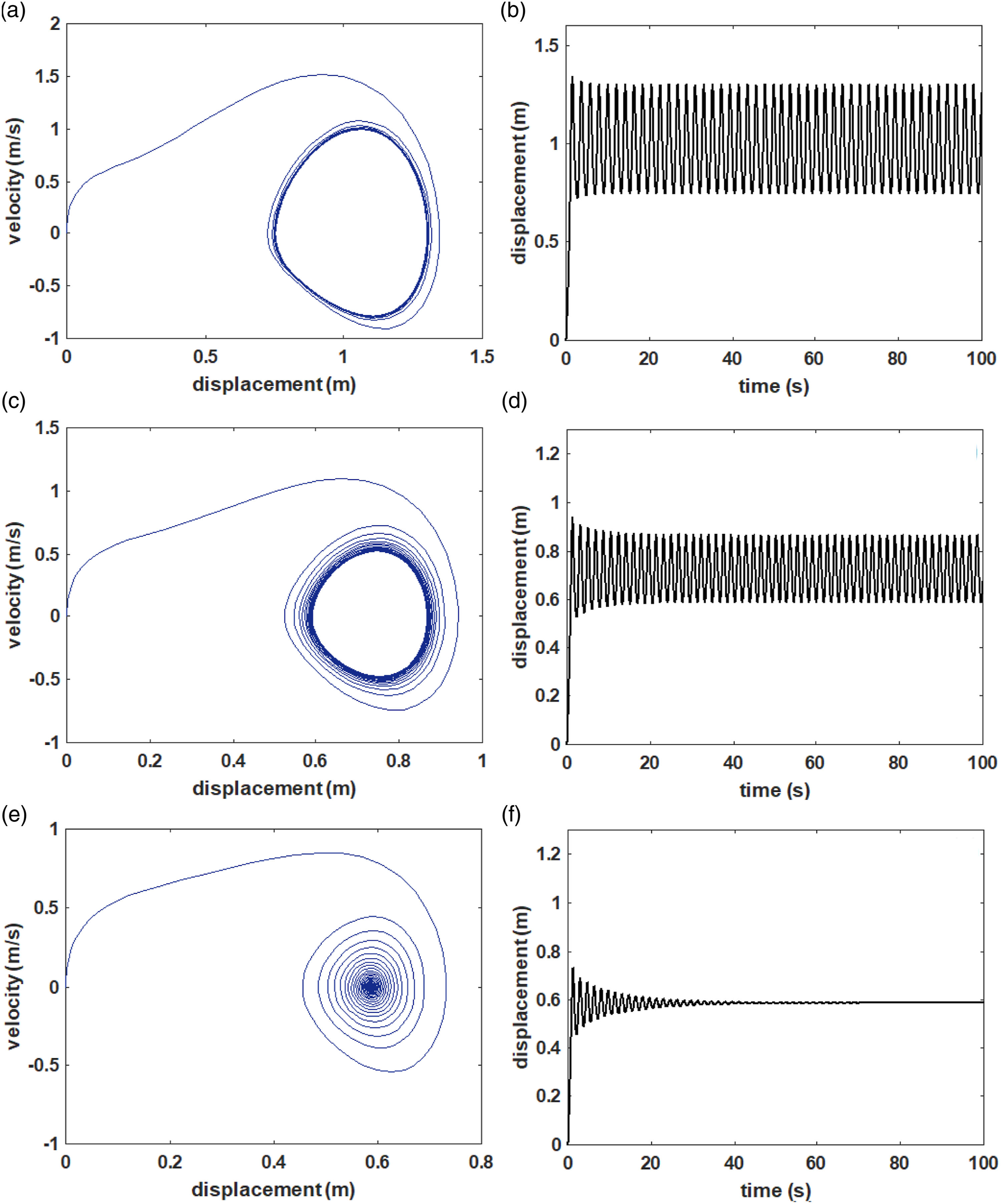
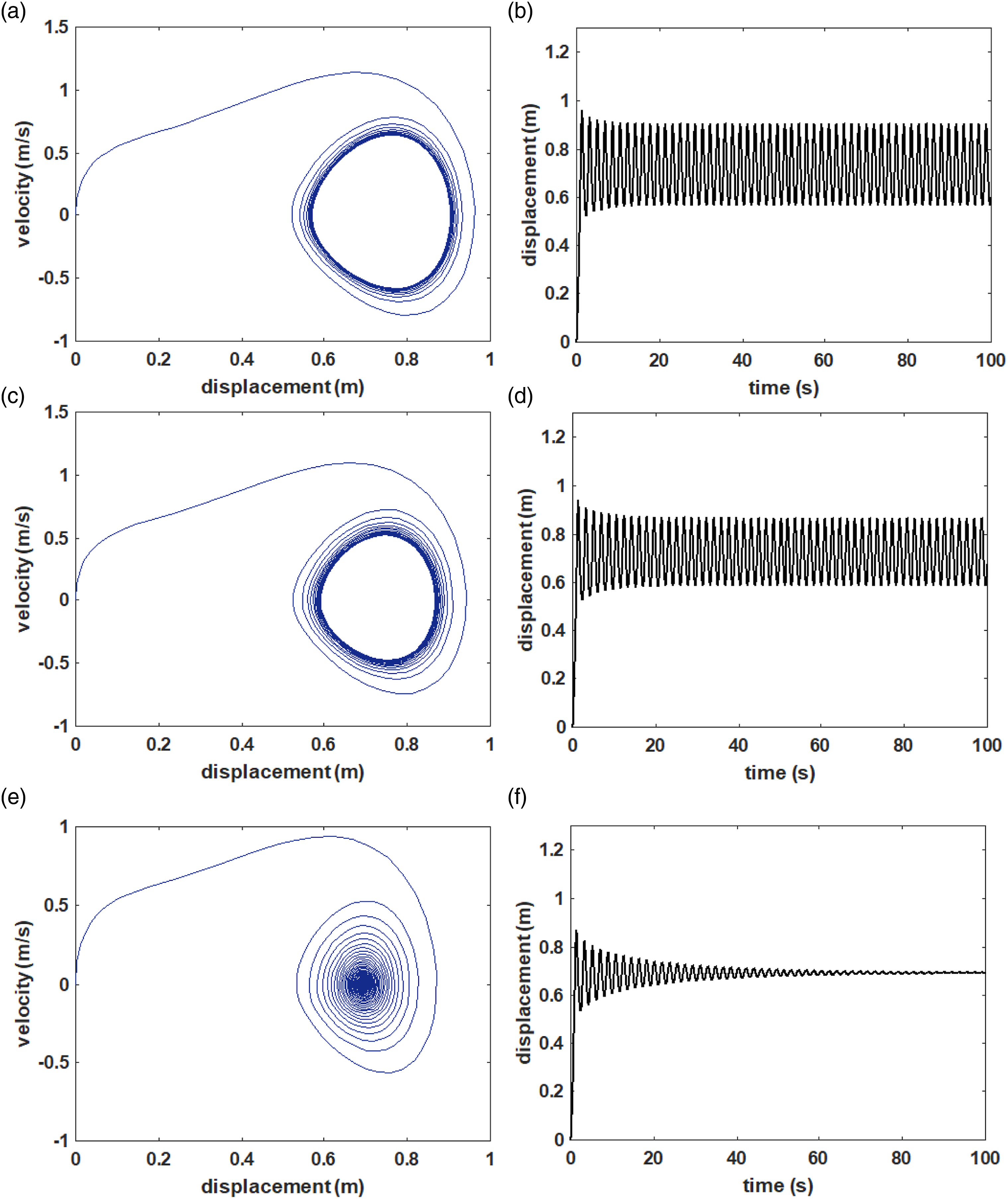
Influence of the damping coefficients
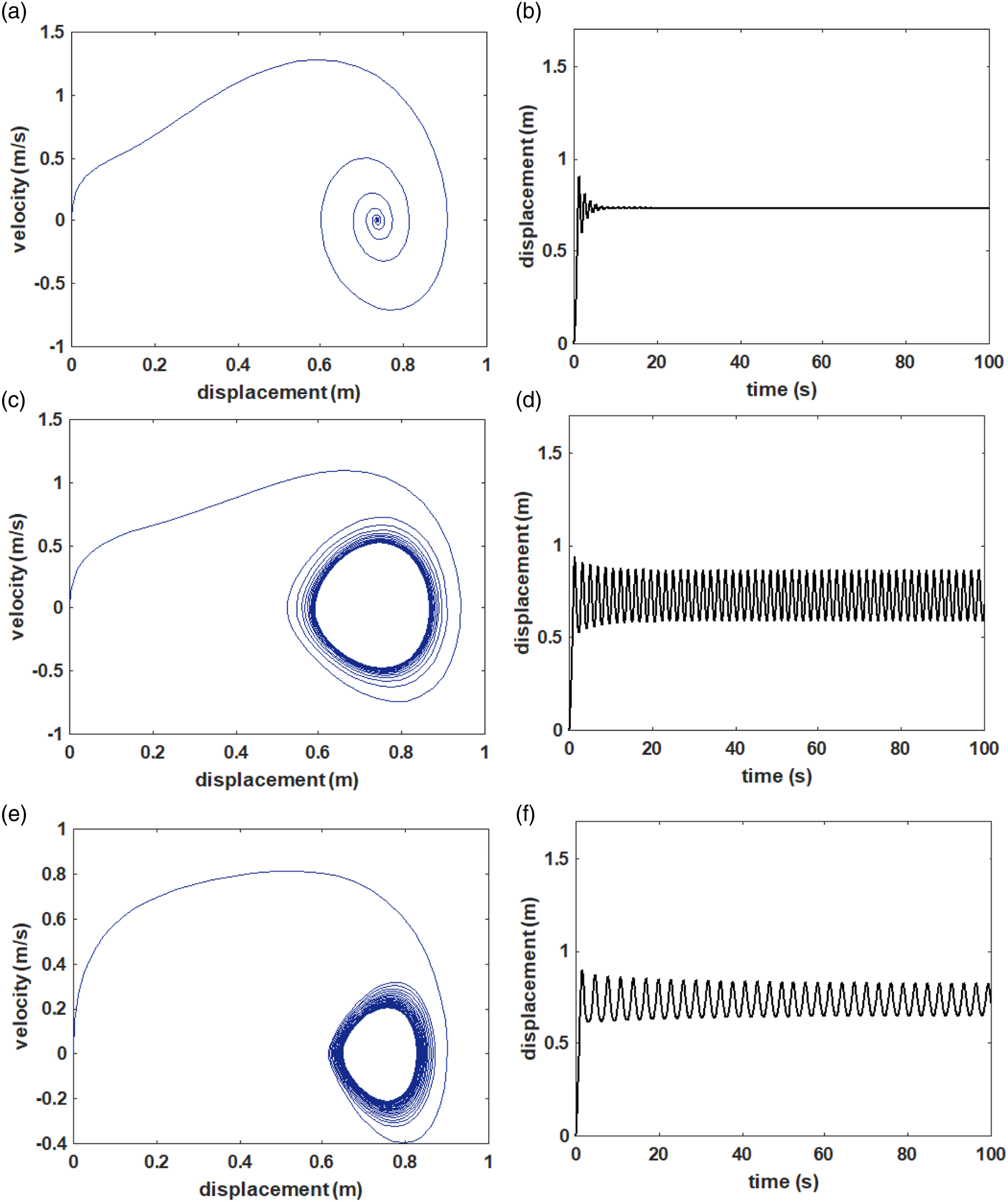
This subsection is provided to examine the good influence of the damping coefficients Sketches the phase plane curves when Sketches the time history curves when Represents the Poincaré sections of the same considered values of Figure 6: (a) Describes the influence of Describes the influence of 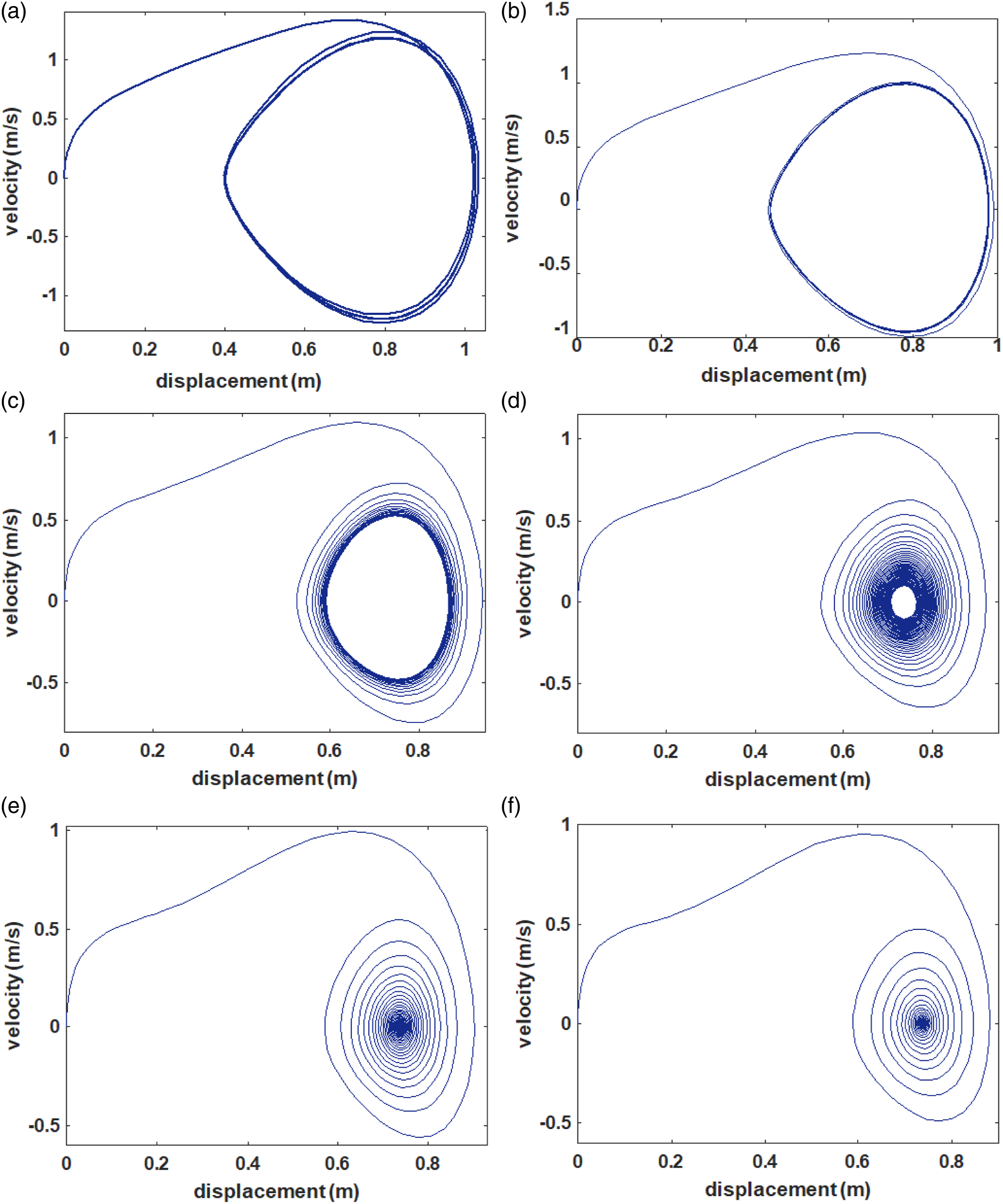
Therefore, parts of Figure 7 are graphed when the damping coefficient
One can then conclude that the damping coefficients have a significant impact on the system behavior, whether or not the sticking phase rises. In other words, increasing the damping of the system reduces the adhesion phase to a certain extent. An exploration of the parts of Figure 7 reveals that when the value of
The corresponding time histories of the drawn curves in Figure 7 are included in the parts of Figure 8 at the same considered values of the damping parameter
We will now investigate the behavior of the system when
It is observed that when the value of
Effect of the masses friction coefficient
Additionally, we examine the impact of different static friction coefficient values Examines the action of Examines the action of 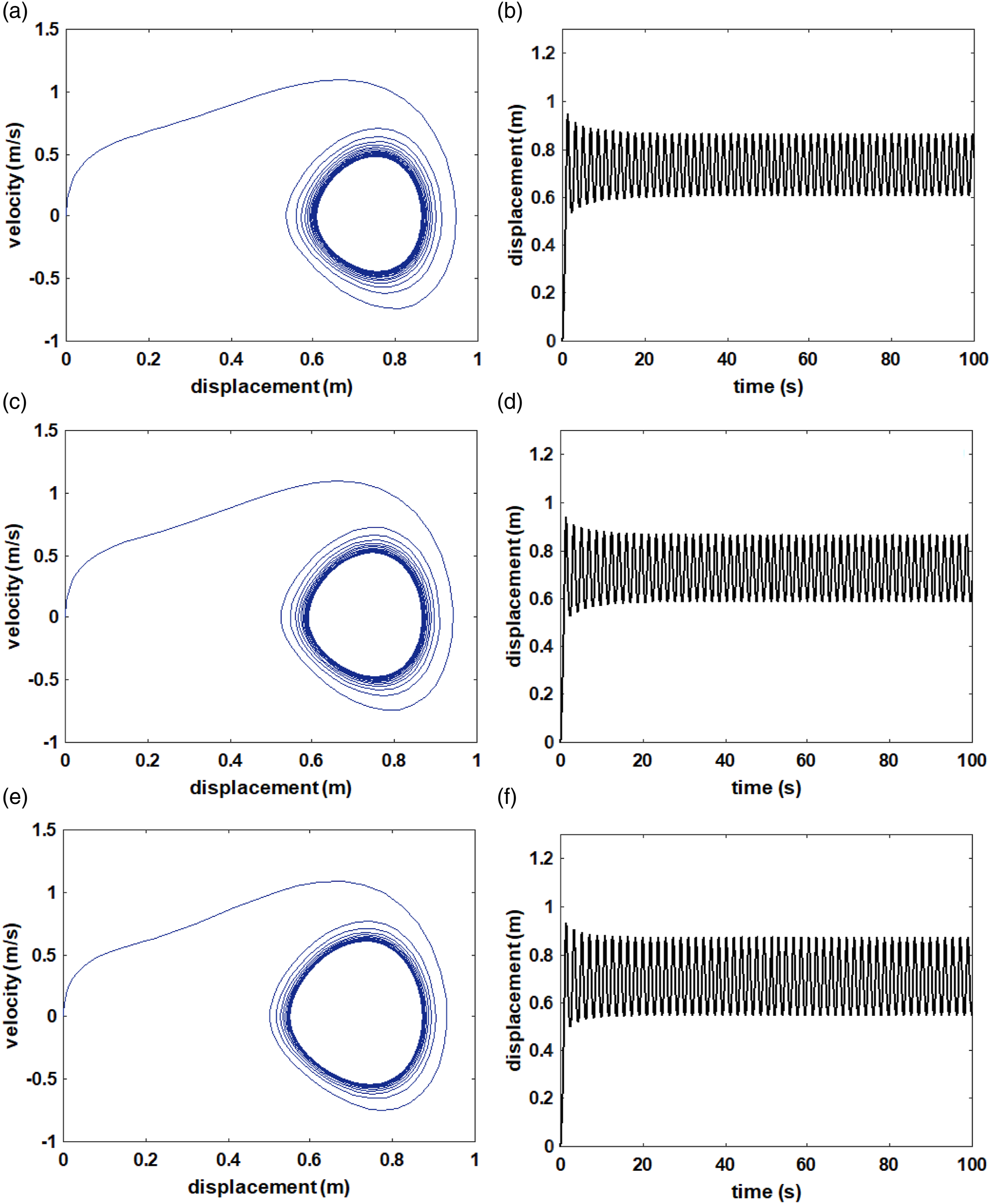
Equivalent stiffness effect on the masses
This subsection is devoted to demonstrate the dynamical behavior of the examined model on the basis of the phase plane plots when the stiffness Portrays the change of the stiffness values for the linear spring: (a, b) Represents the effects of different nonlinear spring stiffness settings: (a, b) Depicts the phase plane charts when: (a, b) Explores the variation of 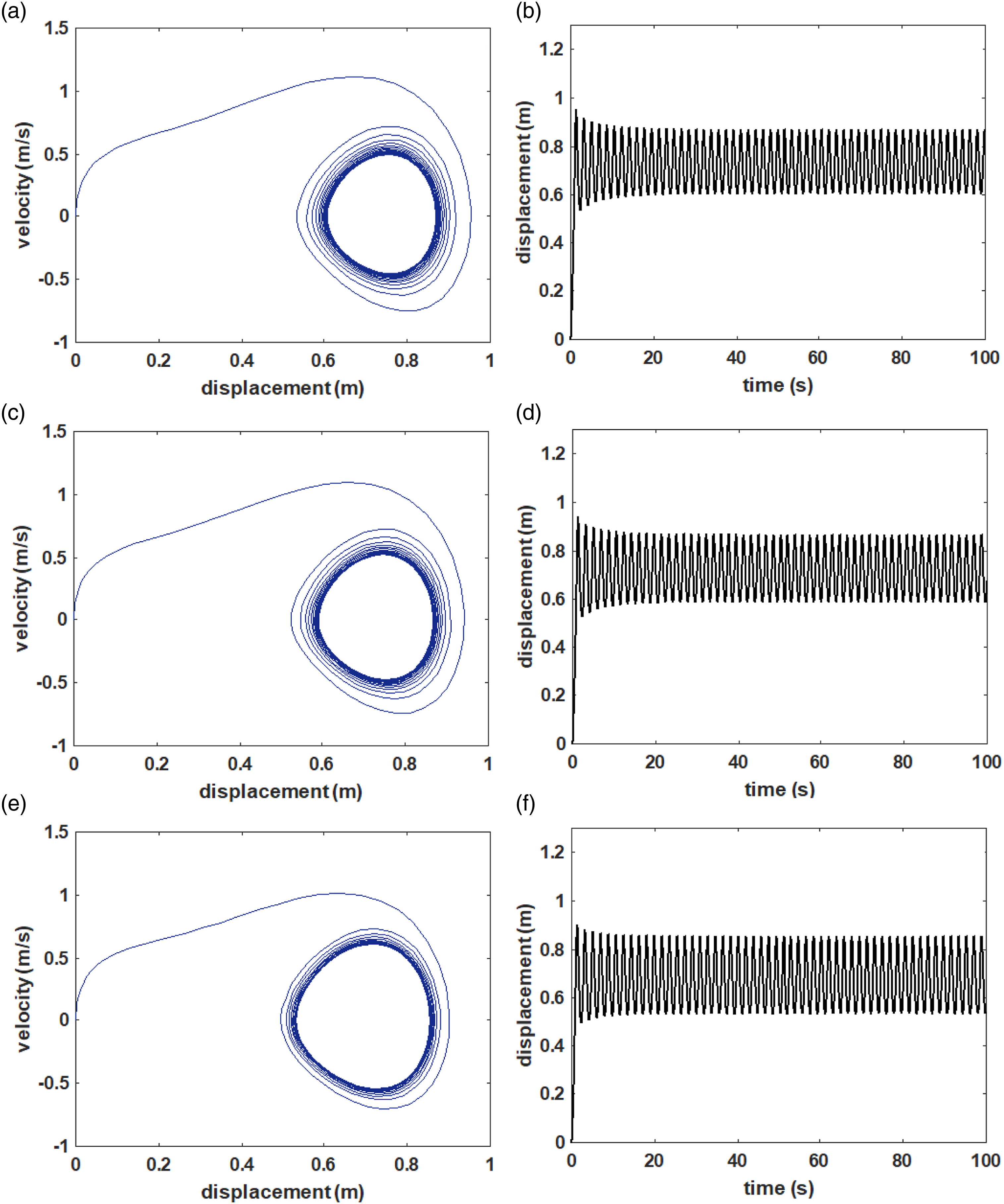
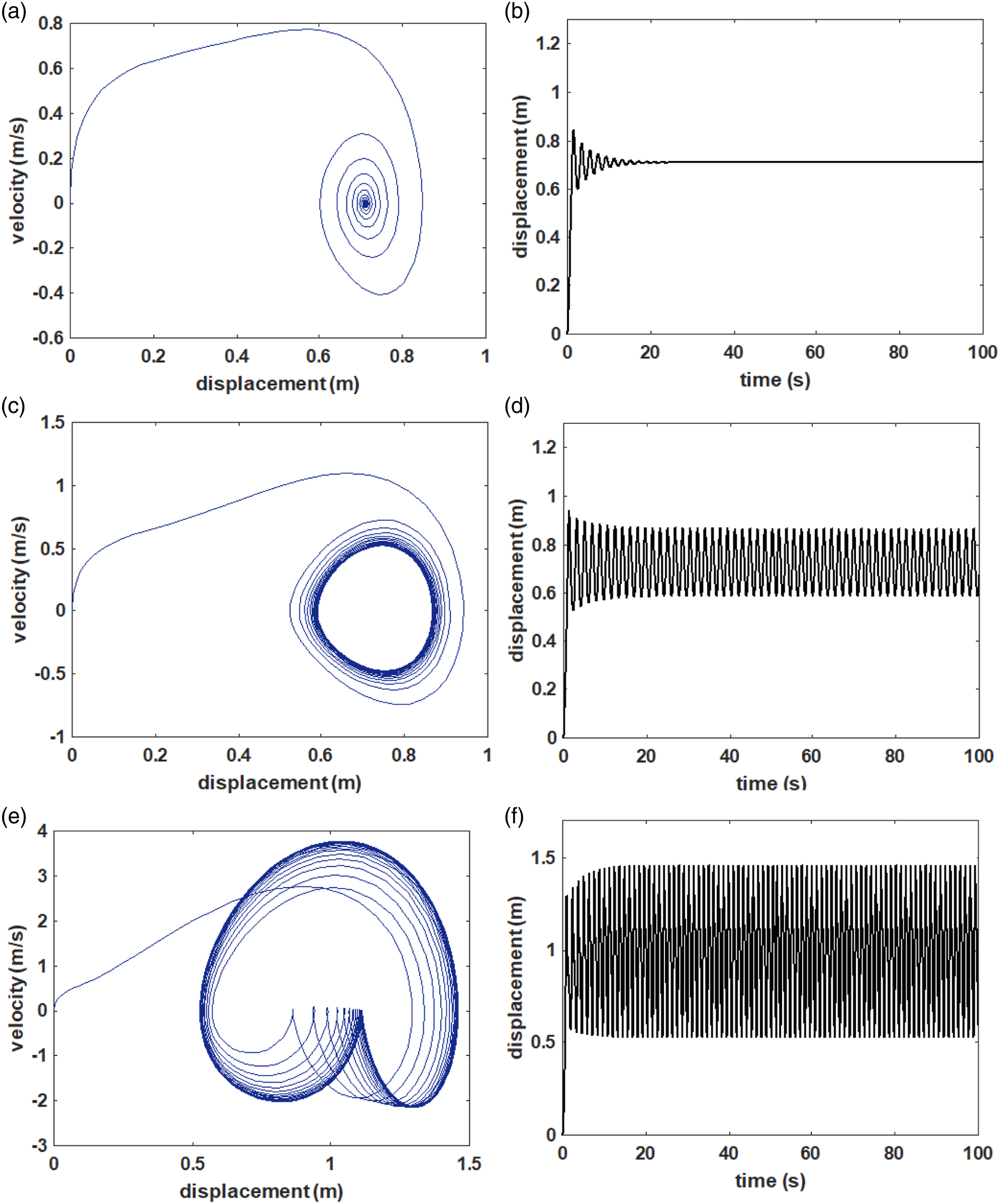
The phase plane and time history curves have been impacted by the change of the stiffness nonlinear spring compared to the linear one, as explored in parts of Figures 14 and 15. According to the included curves in Figure 14, one can say that there is no variation to some extent when
Figures 16 and 17 explore the variation of the phase plane curves and the corresponding time histories when the linear and nonlinear stiffness of the second spring which is connected to the second mass
The effect of the masses’ variation
This part is considered to examine the effect of changing the values of the masses Illustrates of the variation the phase plane curves: (a, b) Illustrates of the variation the phase plane curves: (a, b) 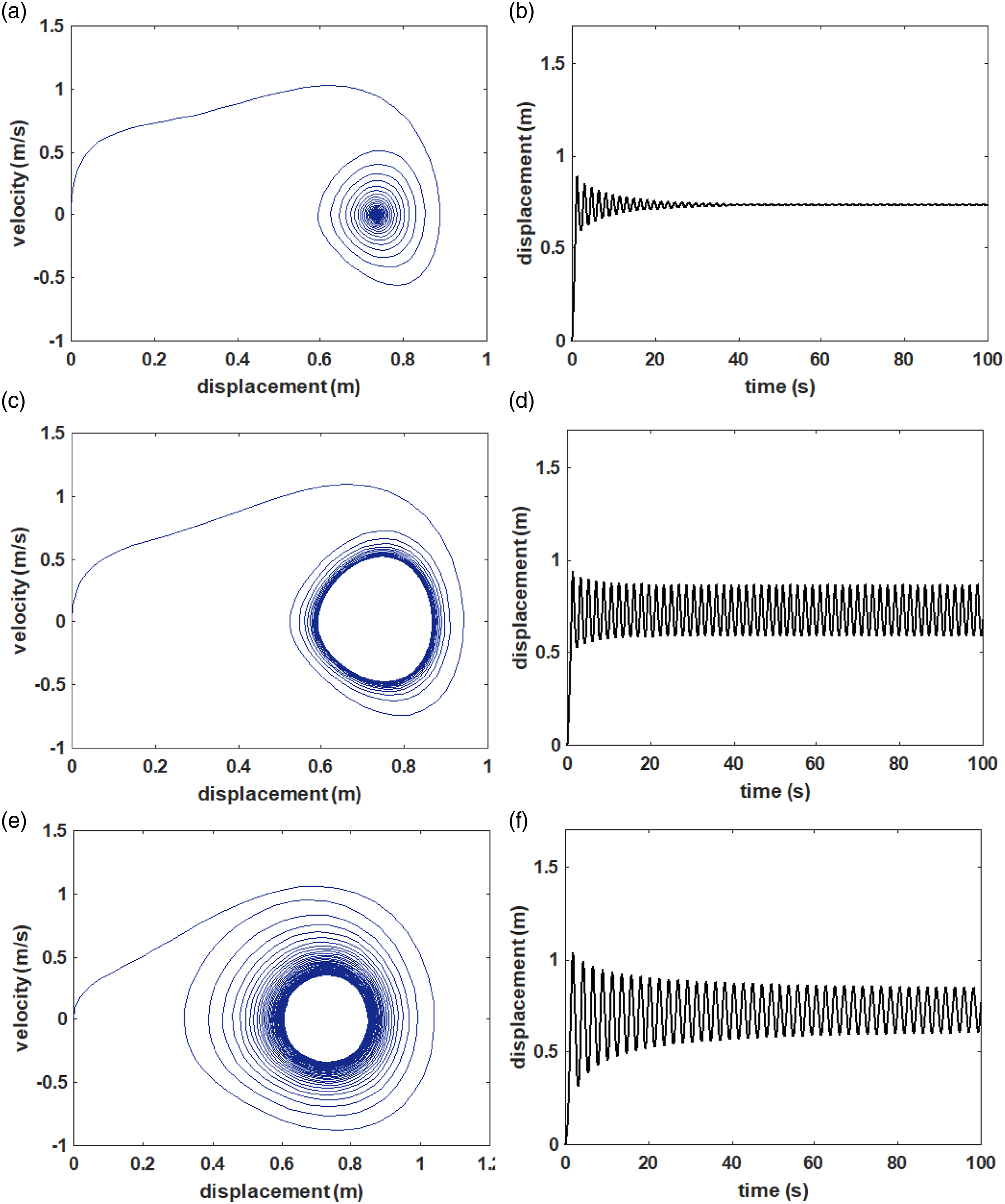
A quick glance at the depicted curves in Figure 19 demonstrates that there is one point of equilibrium at
Conclusion
The motion of two nonlinear spring masses subjected to a smooth friction-velocity curve has been investigated. In light of the system friction forces, the governing second order differential EOM have been derived. These equations have been rewritten in the form of first-order differential equations to examine the equilibrium points applying Hurwitz’s theory. The system characteristic equation and Jacobian matrix are employed to estimate the excitation and critical SS speeds. The stability and behavior of the system motion, along with the behavior of the SS movement, have been examined. The motion and stability of the system have been studied and analyzed to assess the effects of numerous factors, including excitation speed, damping and fraction coefficients, linear and nonlinear spring stiffness, and masses. For varied excitation speeds, the dynamical system under study is asymptotically stable, and the SS phase is important throughout the cycle. As speed increases, the adhesion phase gradually vanishes. Regardless of whether the sticking phase rises or not, damping coefficients have a substantial impact on how the system behaves. Mobility and stability of the system are influenced by the connection between two masses. The outcomes are improved with consideration of the stiffness of nonlinear springs.
The paper’s primary arguments are as follows: 1. With the use of the SMD mechanical model, the dynamic properties of system mechanisms are studied. System critical instability and SS velocity are calculated theoretically as 2. Critical instability velocity is calculated using the Hurwitz model to be 3. The behavior of the system is significantly influenced by damping coefficients. 4. The effects of different stiffness values, whether linear or nonlinear, have been examined, where the nonlinear one having an excellent influence over the linear. 5. The investigated model has been affected by the adjustment of damping and friction coefficients, in addition to the various masses of the blocks.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.