
Abstract
The impetus for the current investigation relates to the implementation of an efficient novel technique to obtain a time-delayed vibration control analytical solution. The current technique follows simple and easy-to-apply criteria. This technique is based on converting the nonlinear time-delayed Van der Pol (VDP)-Duffing oscillator to an equivalent linear one. Details of the conversion to an equivalent linear ordinary differential equation are mentioned. The convergence between the numerical outcomes and the analytic solution is achieved and gives a satisfying accuracy of the equivalent result.
Keywords
Introduction
In recent years, differential equations, especially those containing delayed impacts that lead to the establishment of an important branch of nonlinear analysis, have gained great importance due to their useful role in modeling various events in many applications related to different areas of science such as physics, geography, chemistry, biology, nuclear reactors theory, economics, natural sciences, and engineering.1–3
The governing time delay differential equations for dynamical systems are called an infinite-dimensional system. So, this kind of equation has greater complicated dynamics than the other non-delayed traditional ones. The differential equations that govern the time delay of dynamical systems are called the infinite-dimensional system. So, this type of equation has more complex dynamics than the traditional non-lagging ones. It was treated in the past as an undesirable phenomenon that can destabilize unstable systems. However, the time delay is unavoidable in the active vibration control system. Therefore, many research articles in the field of engineering have recently used time delay as a control parameter which can be utilized to promote controller efficiency since the presence of time delays in the control loop can play a dominant role in either degrading or improving the implementation of the proposed controllers.4,5 Further, the time delay also has a vital and effective role in the field
On the other hand, over the past few years, the investigation of time-delay problems has been a hot topic, so a large number of scientists have conducted many studies on these systems. For the single Hopf bifurcation oscillator, Reddy et al. 9 discussed the impacts of nonlinear time-delayed feedback. Yu et al. 10 also investigated the time-delayed feedback for double chaos and Hopf bifurcation oscillator. Further, the fast-slow dynamics of an electro-optic oscillator with time delay were studied by Weicker et al. 11 Additionally, Rusinek et al. described the dynamics of a Duffing oscillator with time delay in Ref. 12. El-Dib 13 formulated a periodic solution for a strong time-delayed Duffing oscillator. In this investigation, a second-order analytic solution with a damping part was obtained using the multiple scales homotopy perturbation technique. Moreover, the complicated behaviors of optoelectronic nonlinear oscillators with time-delayed have been studied by Chembo et al. 14 The phenomenon of resonance arising from delay in a nonlinear system was also discussed in Ref. 15 utilizing a time-delayed Duffing oscillator. Recently, El-Dib 16 has employed the nonconservative method to investigate a third-order delay-damped Duffing oscillator.
Nonlinear oscillations are one of the hot topics in mechanical engineering and mathematical physics. These types of oscillators can describe the nonlinear vibration phenomenon in physics, engineering, and many other sciences. The oscillator that was introduced by the famous Dutch physicist Balthasar Van der Pol (VDP) (1889–1959) is considered one of the most important oscillators. The VDP oscillator has an extended history due to its important applications in biological and physical sciences.
17
For example, in biology
Thanks to the usage of a historic Chinese approach, the well-known mathematician Ji-Huan He
34
suggested an easy and simple formula to calculate the frequency of the nonlinear oscillators which is known as He’s frequency formulation. The high accuracy and ease of application to deal with the nonlinear systems, especially nonconservative oscillators, are among the most important advantages of this method, which makes it preferable to be utilized among other perturbation methods.
35
For this reason, many researchers were highly motivated to apply this method to show its methodological accuracy. To demonstrate the ease of solving and to assure the remarkable accuracy for the calculated solutions, Ren et al. gave some examples of applying He’s formulation to deal with nonlinear oscillators in Ref. 36. Zhang
37
also introduced an application of He’s formulation for solving a nonlinear force equation. A new modification for He’s formulation was also introduced by Geng and Cai
38
to solve the nonlinear oscillators. Moreover, Fan
39
utilized He’s amplitude-frequency formula for solving the harmonic Duffing nonlinear equation. An application of both He’s energy balance and amplitude-frequency techniques for Duffing oscillators in general form with strong nonlinearity has been studied by Younesian et al.
40
Further, for studying the nonlinear oscillators, Ren and Elías-Zúñiga et al. introduced some theoretical bases and improvements for He’s formulation in Refs. 41 and 42, respectively. For more development of He’s frequency formulation, see. Refs 43 and 44. Lately, Wu and Liu
45
investigated the residual calculation for He’s formulation. For studying the tangent oscillator, He et al.
46
suggested an easy frequency formulation. In Ref. 47, He et al. also employed two-scale fractal derivatives to investigate a fractal vibration. Recently, for an electromechanical system in nano-scale, He et al.
48
have extended He’s frequency formula for a faster calculation of the pull voltage. El-Dib
49
has also suggested an efficient approach for solving a VDP-Duffing jerk oscillator with fractional derivatives. On the other hand, there are important contributions in the literature for both controlling and analytical solutions of nonlinear systems
The basic purpose of the current manuscript is to solve the nonlinear time-delayed VDP equation via the method of equivalent linearization which is a novel simulation of He’s frequency formulation. This manuscript is arranged as follows: In Time-delayed oscillator and simplest solution method, details of the conversion to an equivalent linear ordinary differential equation are described. In The equivalent linearized technique for the nonlinear delayed VDP-Duffing oscillator, the equivalent linearized technique is applied to deal with the nonlinear time-delayed VDP oscillator. In Numerical illustration, numerical illustrations are given. Finally, in Conclusion, the conclusions are displayed.
Time-delayed oscillator and simplest solution method
Let us consider the model of delay differential equation as


The aim is to convert the governing delayed equation to an equivalent ordinary differential equation in the variable

To convert the aforementioned delayed equation (1) into an equivalent configuration (3), we proceed as follows:
Since the function


Assuming the initial conditions of the oscillator (1) as


Similarly, there are


It is noted that because of the approximation given in (6), the comparison between (5) and (7) indicates that the function


Since the trial solution (6) is approximate, then the weight residual technique can be used to determine the unknown coefficients in (10) and (11) as follows


Employing (12) and (13) into equations (10) and (11) then inserting the results into the original delayed equation (1), an equivalent equation in the form (3) is given.
The equivalent linearized technique for the nonlinear delayed Van der Pol-Duffing oscillator
To illustrate the accuracy of the suggested mechanism and show the exactness of our methodology, consider an externally VDP-Duffing oscillator with a nonlinear/linear feedback control that takes the form
25
:

Assuming that the above equation under the following restrictions:

To obtain an analytic solution of the above nonlinear delayed equation without using a perturbation technique, one may convert equation (14) to an equivalent linear oscillator through the following two steps: (i) Transforming the nonlinear delayed equation to an equivalent ordinary nonlinear equation in which the contributions of the delayed feedback are demonstrated in the coefficients of the desired equation. This aim can be carried out by inserting the expansions (7) and (8) into equation (14) to become (ii) Finding the equivalent linearized configuration of the above-resulting equation. The procedure is explained in Ref. 58. It could be noted that equation (16) may be rearranged as three optional functions of


The function




The equivalent linearized configuration of equation (18) can be formed as

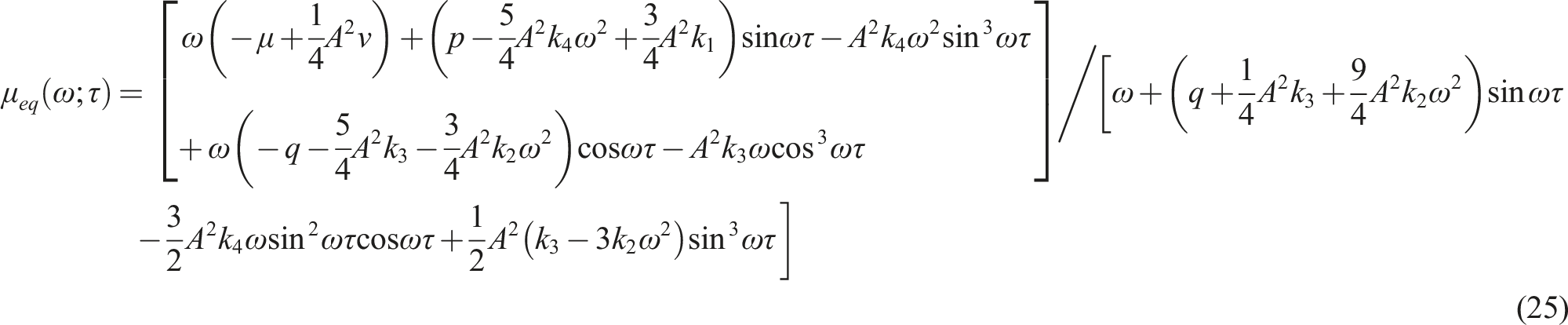
Employing (19)–(21) into (23) and (24) yields

The second-order linear equation (22) admitted the next analytic solution


This is the frequency-amplitude relation with an implicit delay parameter
Numerical illustrations
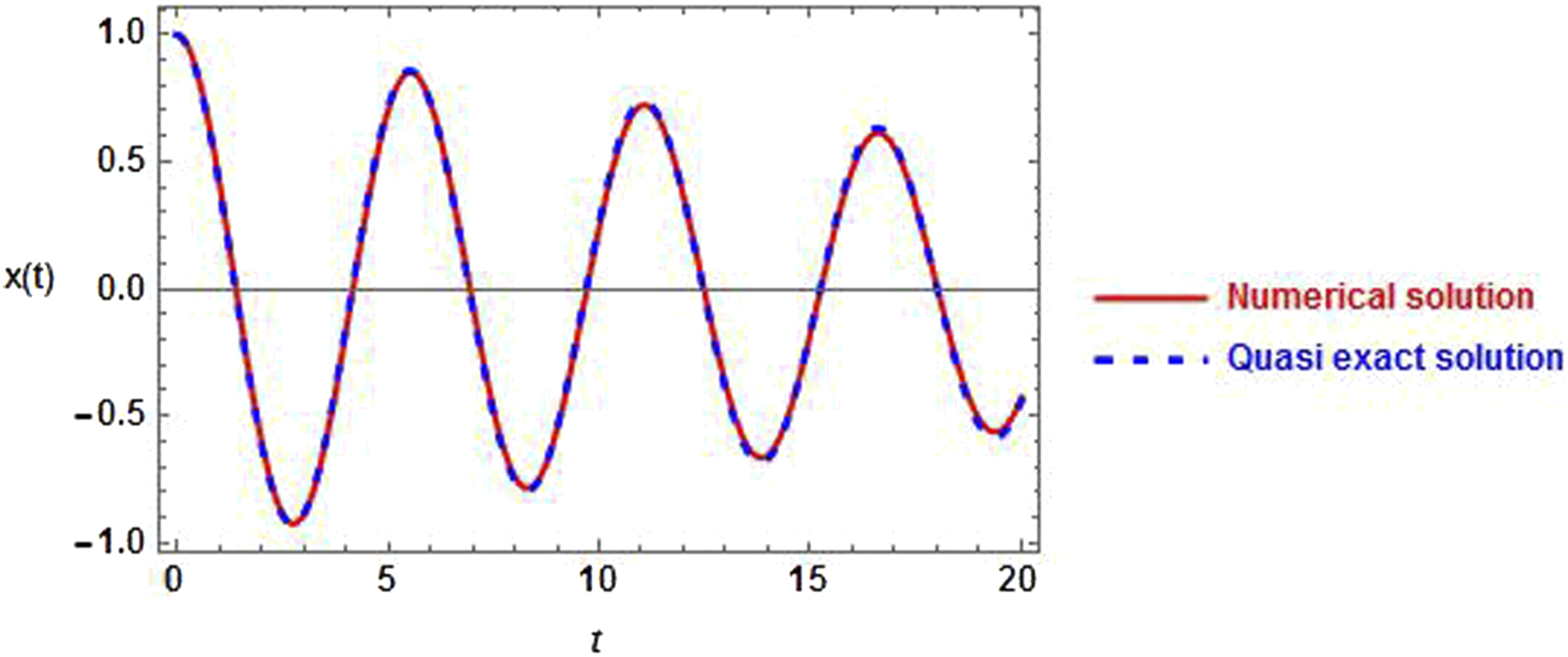
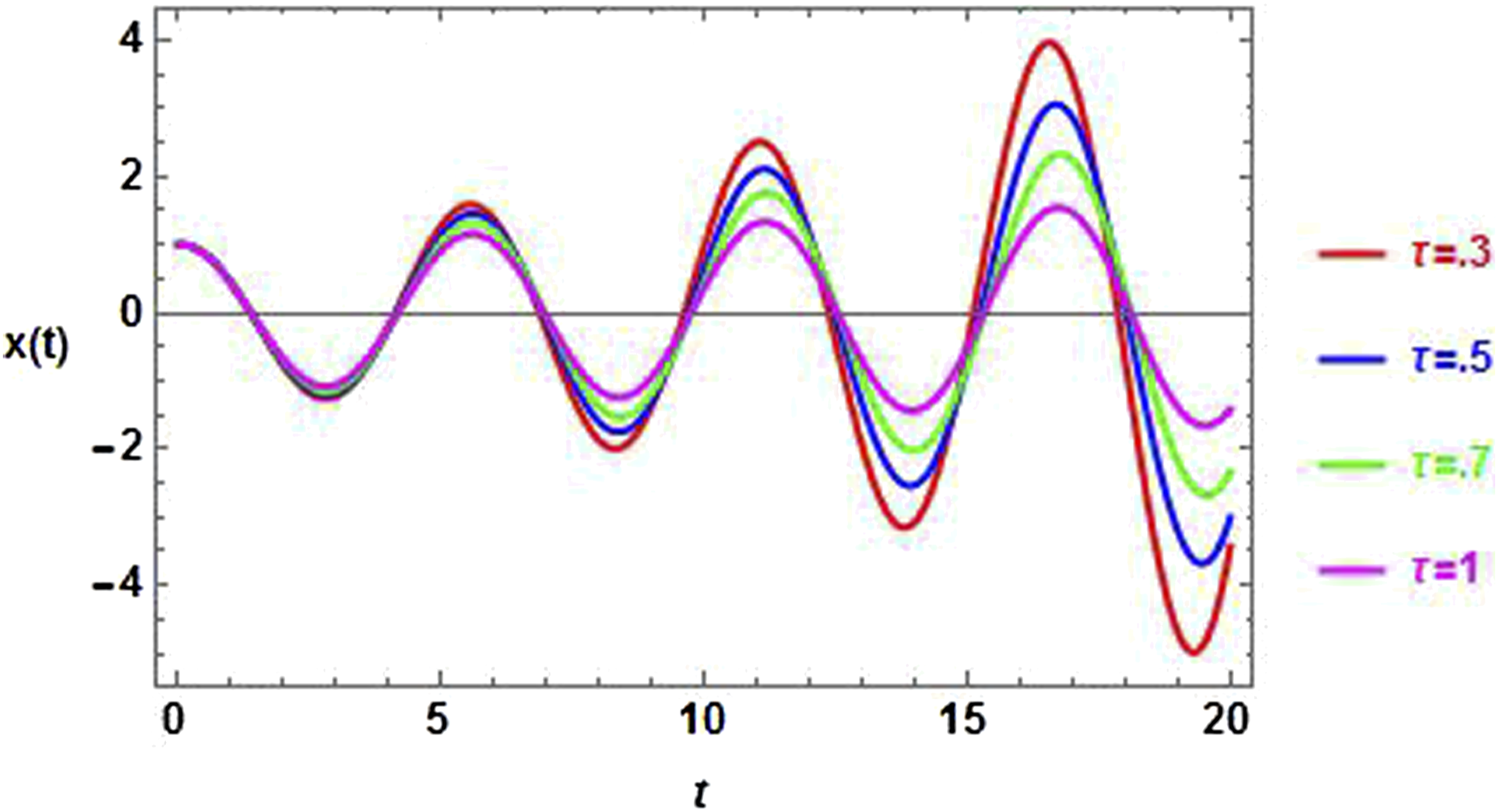
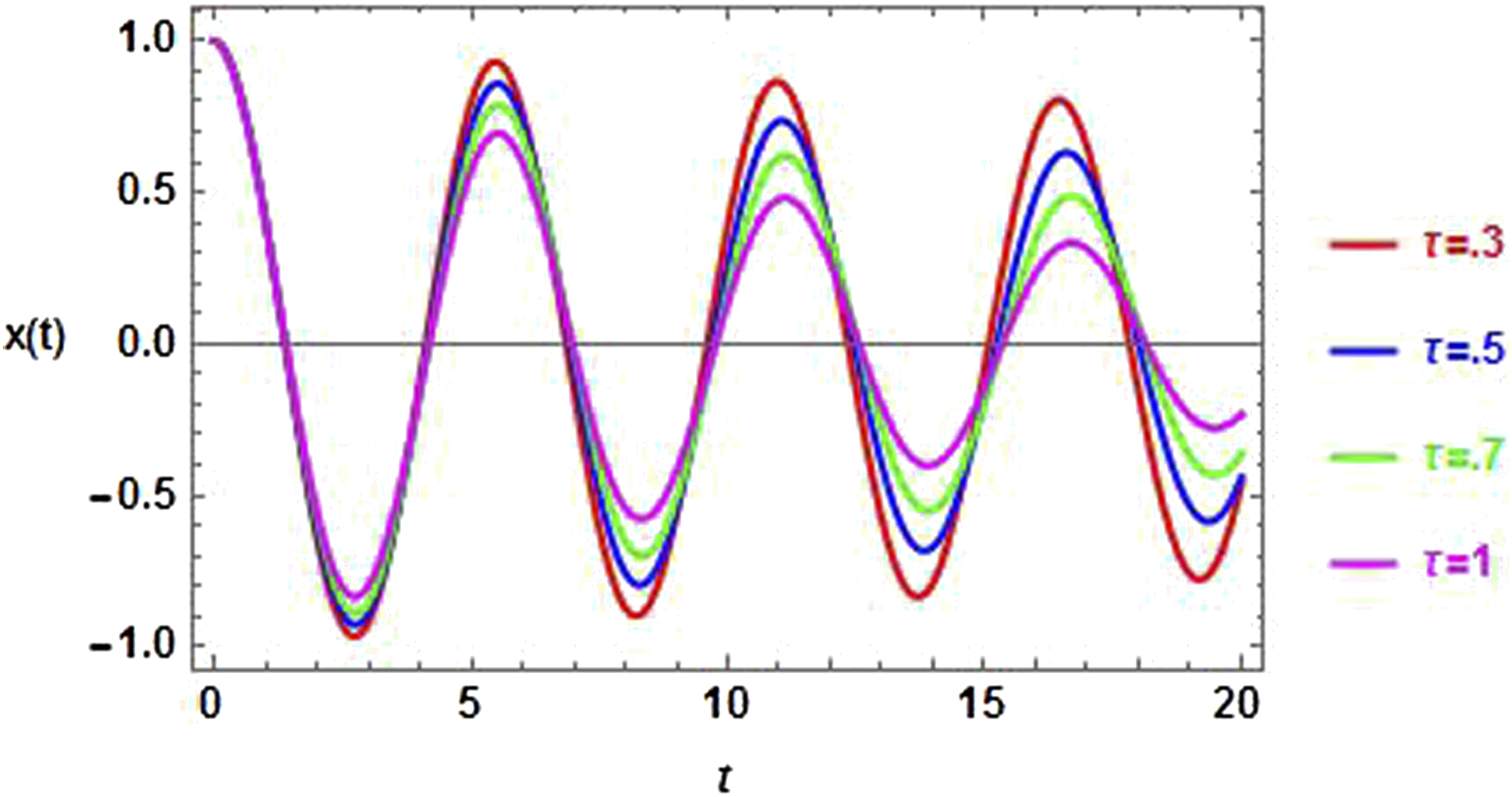
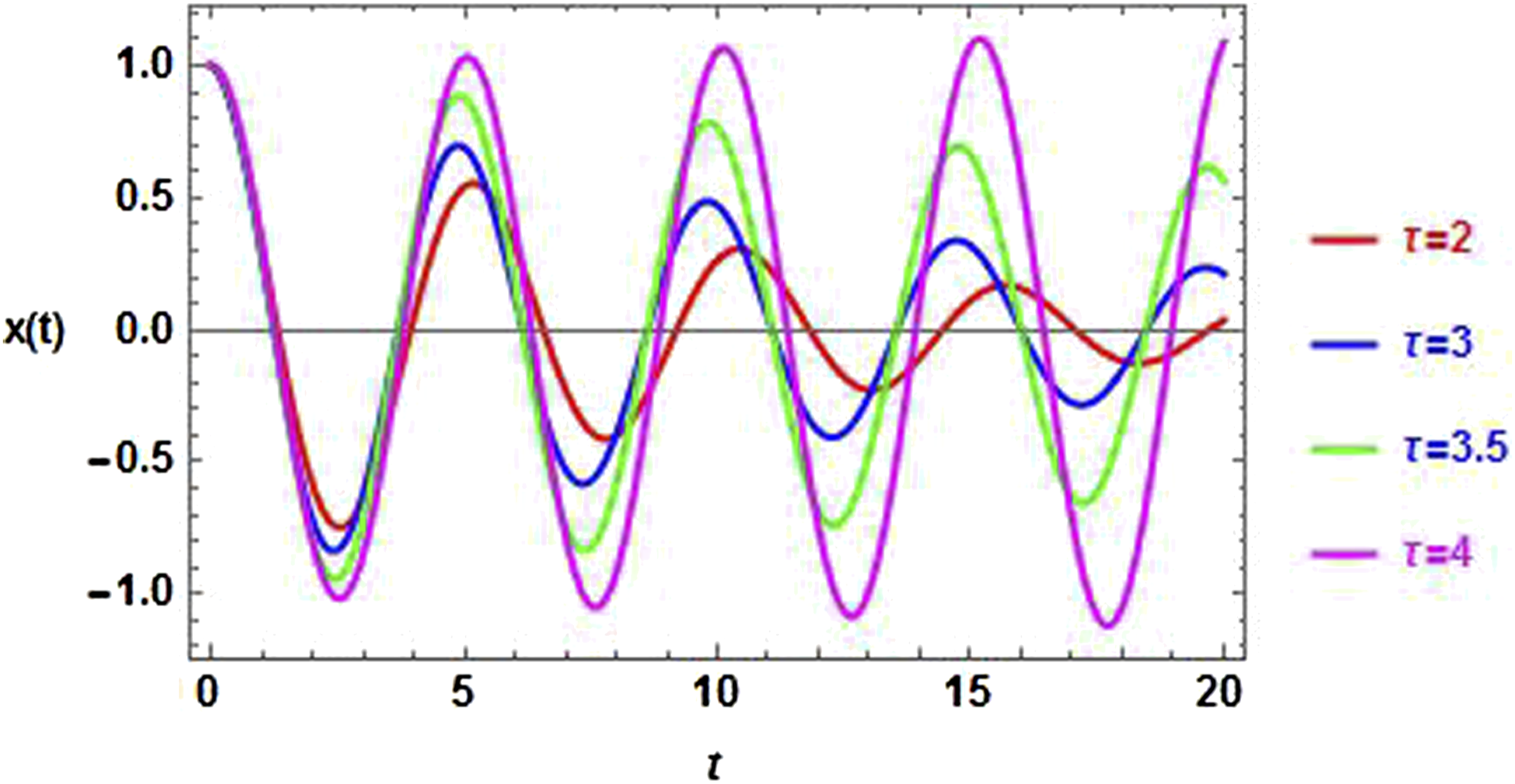
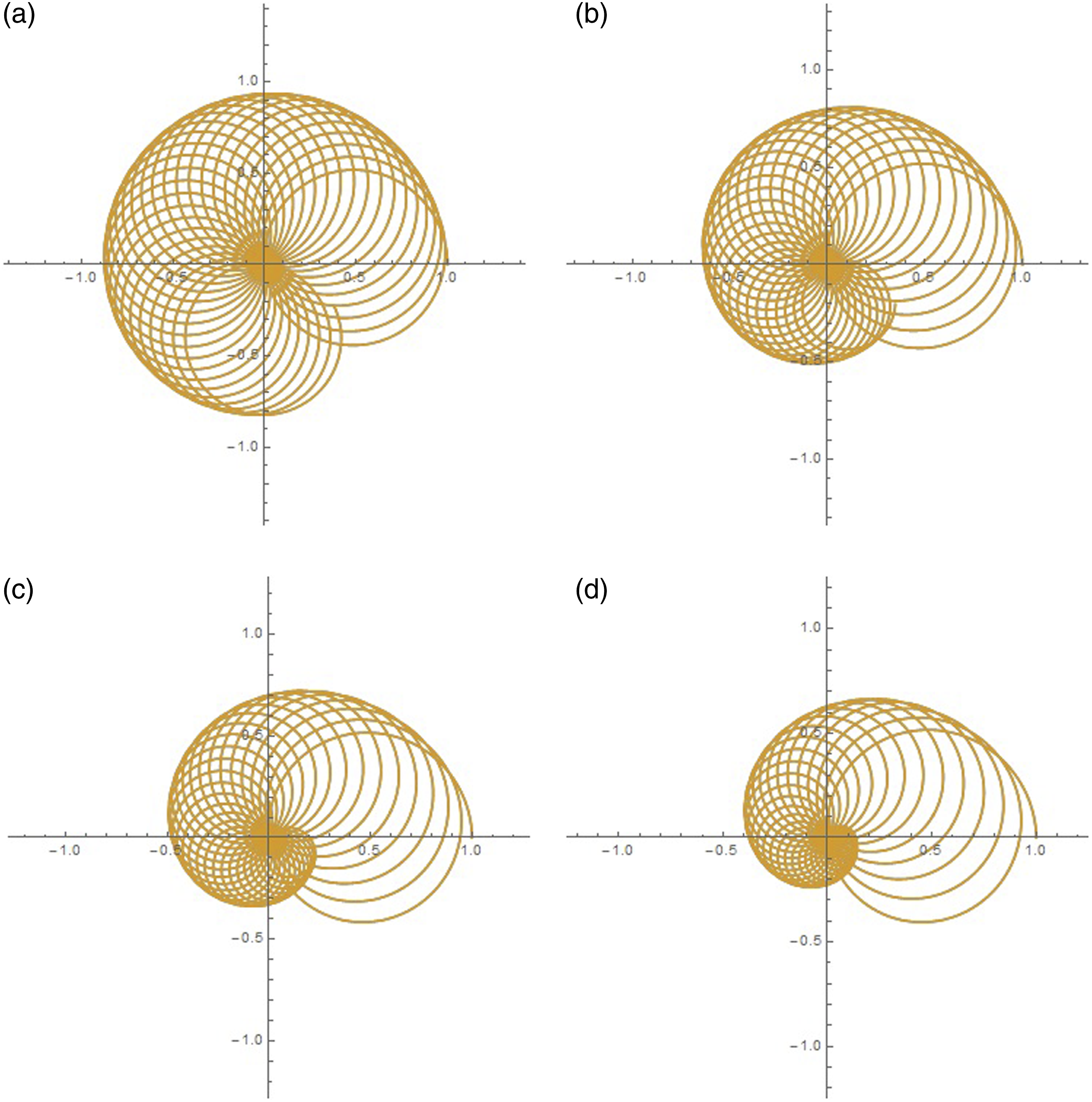
For the above analytical periodic solution (27), some numerical illustrations will be displayed through Figures 1 to 6. Figures 1 and 2 show a very good agreement through the comparison between approximate and numerical solutions at Variation in the analytic solution profile with various values of delay parameter The influence of Variation in the analytic solution profile with various high values of delay parameter The polar diagram of the approximate periodic solution (27) with 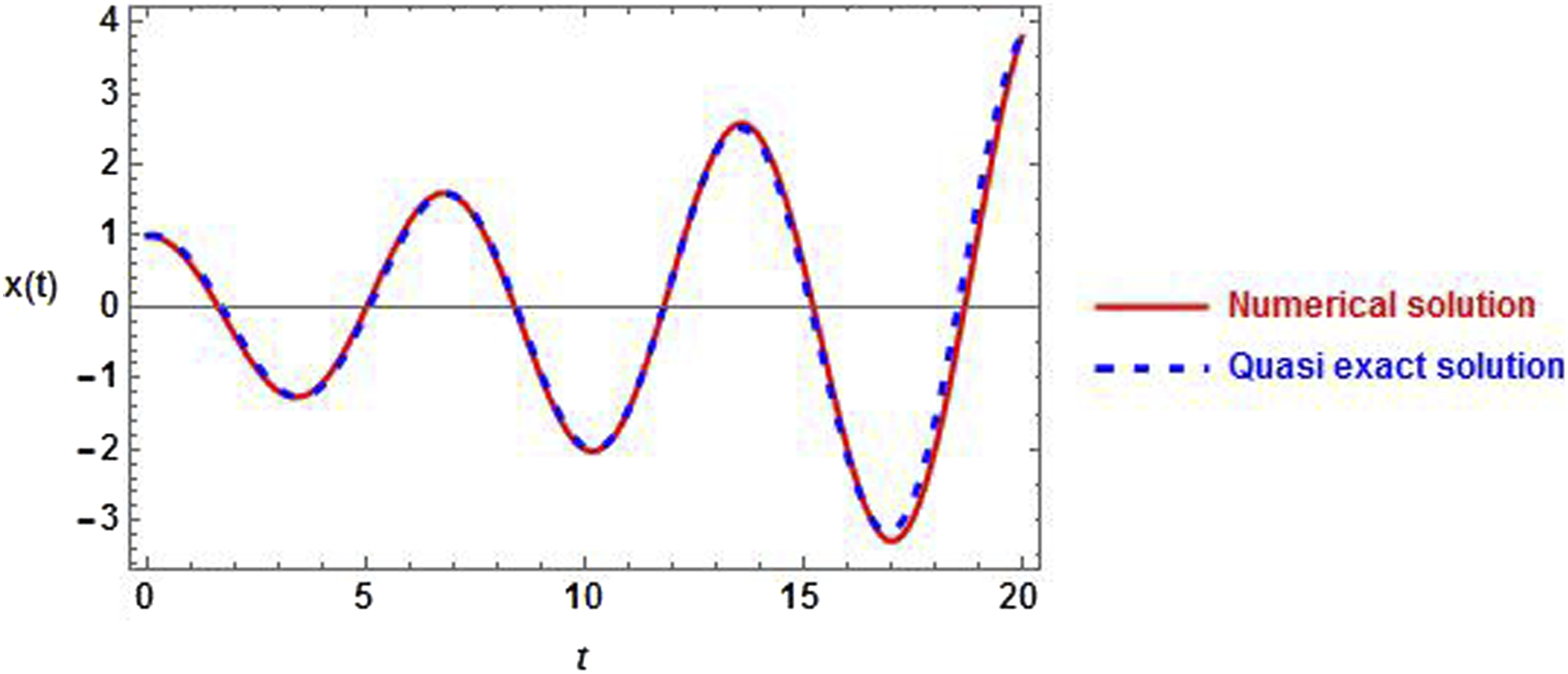
Conclusion
The main objective of the current study is to implement a novel technique to obtain a time-delayed vibrations control analytical solution with simulation of He’s formula. The proposed technique is based on converting time-delayed nonlinear oscillators into equivalent linear oscillators. Since the classic and homotopy perturbation methods work on dividing the nonlinear problem into several linear equations. From the first equation the zero solution is obtained, then it is improved throughout the higher order equations. The proposed method follows the same method and thought by imposing an initial solution to the problem that fulfills the boundary conditions. Thus by returning this solution to the problem, the original nonlinear problem can be converted into an equivalent linear equation. However, the proposed method is distinguished from the other perturbation methods, whether classical or homotopy, in that it is uncomplicated, straightforward, and faster to apply. It is also extendable and non-restrictive, except that the delay factor should be constant and not a function of time. By employing the proposed procedure, it is possible to deal in an easier and better way with the problems of controlling the non-linear delayed oscillator in both engineering and physics fields. It can also be utilized in various fields and on many models, such as biological oscillators, physiological control systems, and multiple time-delay problems. These delayed derivatives can be replaced by ordinary ones. This technique has been used to find a periodic approximate solution for the time-delayed damping nonlinear Duffing-Van der Pol oscillator. Moreover, the convergence between the numerical outcomes and the analytical solution was achieved using the proposed approach, which gave satisfactory accuracy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
In the current investigation, there is no data utilized.